Динамика материальной точки. Все законы и теоремы
Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
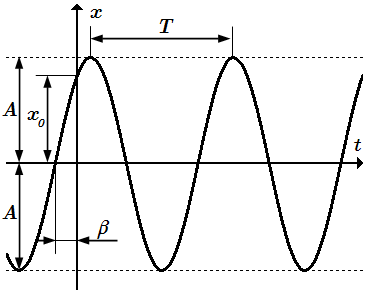
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
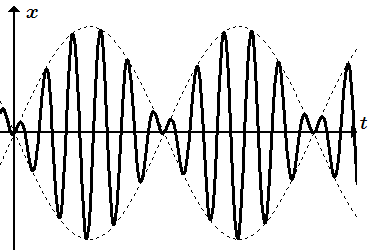
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
Тема 3.1. Основные понятия и аксиомы динамики
§1. Динамика точки. Основные понятия и определения.
В разделе кинематики исследовалось движение тел без учета причин, обеспечивающих это движение. Рассматривалось движение, заданное каким-либо способом и определялись траектории, скорости и ускорения точек этого тела.
В разделе динамики решается более сложная и важная задача. Определяется движение тела под действием сил приложенных к нему, с учетом внешних и внутренних условий, влияющих на это движение, включая самих материальных тел.
Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил.
Понятие о силе, как о величине, характеризующей меру механического взаимодействия материальных тел, было введено в статике. Но при этом в статике мы, по существу, считали все силы постоянными. Между тем, на движущееся тело наряду с постоянными силами (постоянной, например, можно считать силу тяжести) действуют обычно силы переменные, модули и направления которых при движении тела изменяются.
Сила – векторная физическая величина, характеризующая действие одного тела на другое, в результате чего у тела изменяется скорость, то есть появляется ускорение, или происходит деформация тела, либо имеет место и то, и другое. В том случае, когда тело при взаимодействии получает ускорение, говорят о динамическом проявлении сил. В том случае, когда тело при взаимодействии деформируется, говорят о статическом проявлении сил.
Как показывает опыт, переменные силы могут определенным образом зависеть от времени, от положения тела и от его скорости. В частности, от времени зависит сила тяги электровоза при постепенном выключении или включении реостата; от положения тела зависит сила упругости пружины; от скорости движения зависят силы сопротивления среды (воды, воздуха).
К понятию об инертности тел мы приходим, сравнивая результаты действия одной и той же силы на разные материальные тела. Опыт показывает, что если одну и ту же силу приложить к двум разным, свободным от других воздействий покоящимся телам, то в общем случае по истечении одного и того же промежутка времени эти тела пройдут разные расстояния и будут иметь разные скорости.
Инертность и представляет собой свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил. Если, например, при действии одинаковых сил изменение скорости первого тела происходит медленнее, чем второго, то говорят, что первое тело является более инертным, и наоборот.
Количественной мерой инертности данного тела является физическая величина, называемая массой тела. В механике масса т рассматривается как величина скалярная, положительная и постоянная для каждого данного тела.
За единицу массы принят эталон – сплав платины и иридия, хранящийся в палате мер и весов в Париже: [m]=кг. Масса–величина аддитивная
и скалярная.
В общем случае движение тела зависит не только от его суммарной массы и приложенных сил; характер движения может еще зависеть от формы тела, точнее от взаимного расположения образующих его частиц (т.е. от распределения масс).
Под материальной точкой понимают материальное тело столь малых размеров, что различием в движении отдельных его точек можно пренебречь и положение которого можно определить координатами одной из его точек.
Практически данное тело можно рассматривать как материальную точку в тех случаях, когда расстояния, проходимые точками тела при его движении, очень велики по сравнению с размерами самого тела. Кроме того, как будет показано в динамике системы поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе всего тела.
Наконец, материальными точками можно считать частицы, на которые мы будем мысленно разбивать любое тело при определении тех или иных его динамических характеристик.
Точку будем называть изолированной, если на точку не оказывается никакого влияния, никакого действия со стороны других тел и среды, в которой точка движется. Конечно, трудно привести пример подобного состояния. Но представить такое можно.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
§2. Законы динамики
В основе динамики лежат законы, установленные путем обобщения результатов целого ряда опытов и наблюдений над движением тел и проверенные обширной общественно-исторической практикой человечества. Систематически эти законы были впервые изложены И. Ньютоном.
Первый закон (закон инерции), открытый Галилеем, гласит: существуют такие системы отсчета, относительно которых тело покоится или движется прямолинейно и равномерно, если на него не действуют другие тела или действие этих тел компенсировано.
или в другой формулировке
если сумма действующих на тело сил равна нулю, то тело движется равномерно и прямолинейно или находится в покое.
Движение, совершаемое точкой при отсутствии сил, называется движением по инерции.
Закон инерции отражает одно из основных свойств материи — пребывать неизменно в движении и устанавливает для материальных тел эквивалентность состояний покоя и движения по инерции. Из него следует, что если F=0, то точка покоится или движется с постоянной по модулю и направлению скоростью (
3 уравнение движения законы динамики
Если в кинематике только описывается движение тел, то в динамике изучаются причины этого движения под действием сил, действующих на тело.
Динамика – раздел механики, который изучает взаимодействия тел, причины возникновения движения и тип возникающего движения. Взаимодействие – процесс, в ходе которого тела оказывают взаимное действие друг на друга. В физике все взаимодействия обязательно парные. Это значит, что тела взаимодействуют друг с другом парами. То есть всякое действие обязательно порождает противодействие.
Сила – это количественная мера интенсивности взаимодействия тел. Сила является причиной изменения скорости тела целиком или его частей (деформации). Сила является векторной величиной. Прямая, вдоль которой направлена сила, называется линией действия силы. Сила характеризуется тремя параметрами: точкой приложения, модулем (численным значением) и направлением. В Международной системе единиц (СИ) сила измеряется в Ньютонах (Н). Для измерения сил используют откалиброванные пружины. Такие откалиброванные пружины называются динамометрами. Сила измеряется по растяжению динамометра.
Сила, оказывающая на тело такое же действие, как и все силы, действующие на него, вместе взятые, называется равнодействующей силой. Она равна векторной сумма всех сил, действующих на тело:

Чтобы найти векторную сумму нескольких сил нужно выполнить чертеж, где правильно нарисовать все силы и их векторную сумму, и по данному чертежу с использованием знаний из геометрии (в основном это теорема Пифагора и теорема косинусов) найти длину результирующего вектора.
Виды сил:
1. Сила тяжести. Приложена к центру масс тела и направлена вертикально вниз (или что тоже самое: перпендикулярно линии горизонта), и равна:

где: g — ускорение свободного падения, m — масса тела. Не перепутайте: сила тяжести перпендикулярна именно горизонту, а не поверхности на которой лежит тело. Таким образом, если тело лежит на наклонной поверхности, сила тяжести по-прежнему будет направлена строго вниз.
2. Сила трения. Приложена к поверхности соприкосновения тела с опорой и направлена по касательной к ней в сторону противоположную той, куда тянут, или пытаются тянуть тело другие силы.
3. Сила вязкого трения (сила сопротивления среды). Возникает при движении тела в жидкости или газе и направлена против скорости движения.
4. Сила реакции опоры. Действует на тело со стороны опоры и направлена перпендикулярно опоре от нее. Когда тело опирается на угол, то сила реакции опоры направлена перпендикулярно поверхности тела.
5. Сила натяжения нити. Направлена вдоль нити от тела.
6. Сила упругости. Возникает при деформации тела и направлена против деформации.
Обратите внимание и отметьте для себя очевидный факт: если тело находится в покое, то равнодействующая сил равна нулю.
Проекции сил
В большинстве задач по динамике на тело действует больше чем одна сила. Для того чтобы найти равнодействующую всех сил в этом случае можно пользоваться следующим алгоритмом:
- Найдем проекции всех сил на ось ОХ и просуммируем их с учетом их знаков. Так получим проекцию равнодействующей силы на ось ОХ.
- Найдем проекции всех сил на ось OY и просуммируем их с учетом их знаков. Так получим проекцию равнодействующей силы на ось OY.
- Результирующая всех сил будет находится по формуле (теореме Пифагора):

При этом, обратите особое внимание на то, что:
- Если сила перпендикулярна одной из осей, то проекция именно на эту ось будет равна нулю.
- Если при проецировании силы на одну из осей «всплывает» синус угла, то при проецировании этой же силы на другую ось всегда будет косинус (того же угла). Запомнить при проецировании на какую ось будет синус или косинус легко. Если угол прилежит к проекции, то при проецировании силы на эту ось будет косинус.
- Если сила направлена в ту же сторону что и ось, то ее проекция на эту ось будет положительной, а если сила направлена в противоположную оси сторону, то ее проекция на эту ось будет отрицательной.
Законы Ньютона
Законы динамики, описывающие влияние различных взаимодействий на движение тел, были в одной из своих простейших форм, впервые четко и ясно сформулированы Исааком Ньютоном в книге «Математические начала натуральной философии» (1687 год), поэтому эти законы также называют Законами Ньютона. Ньютоновская формулировка законов движения справедлива только в инерциальных системах отсчета (ИСО). ИСО – система отсчета, связанная с телом, движущимся по инерции (равномерно и прямолинейно).
Есть и другие ограничения на применимость законов Ньютона. Например, они дают точные результаты только до тех пор, пока применяются к телам, скорости которых много меньше скорости света, а размеры значительно превышают размеры атомов и молекул (обобщением классической механики на тела, двигающиеся с произвольной скоростью, является релятивистская механика, а на тела, размеры которых сравнимы с атомными — квантовая механика).
Первый закон Ньютона (или закон инерции)
Формулировка: В ИСО, если на тело не действуют никакие силы или действие сил скомпенсировано (то есть равнодействующая сил равна нулю), то тело сохраняет состояние покоя или равномерного прямолинейного движения.
Свойство тел сохранять свою скорость при отсутствии действия на него других тел называется инерцией. Поэтому первый закон Ньютона называют законом инерции. Итак, причиной изменения скорости движения тела целиком или его частей всегда является его взаимодействие с другими телами. Для количественного описания изменения движения тела под воздействием других тел необходимо ввести новую величину – массу тела.
Масса – это свойство тела, характеризующее его инертность (способность сохранять скорость постоянной). В Международной системе единиц (СИ) масса тела измеряется в килограммах (кг). Масса тела – скалярная величина. Масса также является мерой количества вещества:

Второй закон Ньютона – основной закон динамики
Приступая к формулировке второго закона, следует вспомнить, что в динамике вводятся две новые физические величины – масса тела и сила. Первая из этих величин – масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие. Вторая – сила – является количественной мерой действия одного тела на другое.
Формулировка: Ускорение, приобретаемое телом в ИСО, прямо пропорционально равнодействующей всех сил, действующих на тело, и обратно пропорционально массе этого тела:

Однако при решении задач по динамике второй закон Ньютона целесообразно записывать в виде:

Если на тело одновременно действуют несколько сил, то под силой в формуле, выражающей второй закон Ньютона, нужно понимать равнодействующую всех сил. Если равнодействующая сила равна нолю, то тело будет оставаться в состоянии покоя или равномерного прямолинейного движения, т.к. ускорение будет нулевым (первый закон Ньютона).
Третий закон Ньютона
Формулировка: В ИСО тела действуют друг на друга с силами, равными по модулю и противоположными по направлению, лежащими на одной прямой и имеющими одну физическую природу:

Эти силы приложены к разным телам и поэтому не могут уравновешивать друг друга. Обратите внимание, что складывать можно только силы, которые одновременно действуют на одно из тел. При взаимодействии двух тел возникают силы, равные по величине и противоположные по направлению, но складывать их нельзя, т.к. приложены они к разным телам.
Алгоритм решения задач по динамике
Задачи по динамике решаются с помощью законов Ньютона. Рекомендуется следующий порядок действий:
1. Проанализировав условие задачи, установить, какие силы действуют и на какие тела;
2. Показать на рисунке все силы в виде векторов, то есть направленных отрезков, приложенных к телам, на которые они действуют;
3. Выбрать систему отсчета, при этом полезно одну координатную ось направить туда же, куда направлено ускорение рассматриваемого тела, а другую – перпендикулярно ускорению;
4. Записать II закон Ньютона в векторной форме:

5. Перейти к скалярной форме уравнения, то есть записать все его члены в том же порядке в проекциях на каждую из осей, без знаков векторов, но учитывая, что силы, направленные против выбранных осей будут иметь отрицательные проекции, и, таким образом, в левой части закона Ньютона они будут уже вычитаться, а не прибавляться. В результате получатся выражения вида:
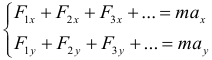
6. Составить систему уравнений, дополнив уравнения, полученные в предыдущем пункте, в случае необходимости, кинематическими или другими простыми уравнениями;
7. Провести далее все необходимые математические этапы решения;
8. Если в движении участвует несколько тел, анализ сил и запись уравнений производится для каждого из них по отдельности. Если в задаче по динамике описывается несколько ситуаций, то подобный анализ производится для каждой ситуации.
При решении задач учитывайте также следующее: направление скорости тела и равнодействующей сил необязательно совпадают.
Сила упругости
Деформацией называют любое изменение формы или размеров тела. Упругими называют такие деформации, при которых тело полностью восстанавливает свою форму после прекращения действия деформирующей силы. Например, после того, как груз сняли с пружины, её длина в недеформированном состоянии не изменилась. При упругой деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела. Ее называют силой упругости. Простейшим видом деформации является деформация одностороннего растяжения или сжатия.
При малых деформациях модуль силы упругости пропорционален деформации тела. При этом сила упругости направлена в сторону, противоположную направлению перемещения частиц тела при деформации, и может быть рассчитана по формуле:

где: k – жесткость тела, х – величина растяжения (или сжатия, другими словами: деформации тела), она равна модулю разности между конечной и начальной длиной деформируемого тела. Важно, что величина растяжения или сжатия не равна ни начальной, ни конечной длине тела в отдельности. Жесткость не зависит ни от величины приложенной силы, ни от деформации тела, а определяется только материалом, из которого изготовлено тело, его формой и размерами. В системе СИ жесткость измеряется в Н/м.
Утверждение о пропорциональности силы упругости и деформации называют законом Гука. В технике часто применяются спиралеобразные пружины. При растяжении или сжатии пружин возникают упругие силы, которые также подчиняются закону Гука. Коэффициент k называют жесткостью пружины. В пределах применимости закона Гука пружины способны сильно изменять свою длину. Поэтому их часто используют для измерения сил. Пружину, растяжение которой проградуировано в единицах силы, называют динамометром.
Таким образом, у каждого конкретного тела (а не материала) есть своя жесткость и она не изменяется для данного тела. Таким образом, если у Вас в задаче по динамике несколько раз растягивали одну и ту же пружину Вы должны понимать, что ее жесткость во всех случаях была одна и та же. С другой стороны если в задаче было несколько пружин разных габаритов, но, например, все они были стальные, то тем не менее у них у всех будут разные жесткости. Так как жесткость не является характеристикой материала, то ее нельзя найти ни в каких таблицах. Жесткость каждого конкретного тела будет либо Вам дана в задаче по динамике, либо ее значение должно стать предметом некоторых дополнительных изысканий при решении данной задачи.
При сжатии сила упругости препятствует сжатию, а при растяжении – препятствует растяжению. Рассмотрим также то, как можно выразить жесткость нескольких пружин соединенных определённым образом. При параллельном соединении пружин общий коэффициент жесткости рассчитывается по формуле:

При последовательном соединении пружин общий коэффициент жесткости может быть найден из выражения:

Вес тела
Силу тяжести, с которой тела притягиваются к Земле, нужно отличать от веса тела. Понятие веса широко используется в повседневной жизни в неправильном смысле, под весом подразумевается масса, однако это не так.
Весом тела называют силу, с которой тело действует на опору или подвес. Вес – сила, которая, как и все силы, измеряется в ньютонах (а не в килограммах), и обозначается P. При этом предполагается, что тело неподвижно относительно опоры или подвеса. Согласно третьему закону Ньютона вес зачастую равен либо силе реакции опоры (если тело лежит на опоре), либо силы натяжении нити или силе упругости пружины (если тело висит на нити или пружине). Сразу оговоримся — вес не всегда равен силе тяжести.
Невесомость – это состояние, которое наступает, когда вес тела равен нолю. В этом состоянии тело не действует на опору, а опора на тело.
Увеличение веса тела, вызванное ускоренным движением опоры или подвеса, называют перегрузкой. Перегрузка рассчитывается по формуле:

где: P – вес тела, испытывающего перегрузку, P0 – вес этого же тела в состоянии покоя. Перегрузка – безразмерная величина. Это хорошо видно из формулы. Поэтому не верьте писателям-фантастам, которые в своих книгах измеряют ее в g.
Запомните, что вес никогда не изображается на рисунках. Он просто вычисляется по формулам. А на рисунках изображается сила натяжения нити либо сила реакции опоры, которые по третьему закону Ньютона численно равны весу, но направлены в другую сторону.
Итак, отметим еще раз три существенно важных момента в которых часто путаются:
- Несмотря на то, что вес и сила реакции опоры равны по величине и противоположны по направлению, их сумма не равна нулю. Эти силы вообще нельзя складывать, т.к. они приложены к разным телам.
- Нельзя путать массу и вес тела. Масса – собственная характеристика тела, измеряется в килограммах, вес – это сила действия на опору или подвес, измеряется в Ньютонах.
- Если надо найти вес тела Р, то сначала находят силу реакции опоры N, или силу натяжения нити Т, а по третьему закону Ньютона вес равен одной из этих сил и противоположен по направлению.
Сила трения
Трение – один из видов взаимодействия тел. Оно возникает в области соприкосновения двух тел при их относительном движении или попытке вызвать такое движение. Трение, как и все другие виды взаимодействия, подчиняется третьему закону Ньютона: если на одно из тел действует сила трения, то такая же по модулю, но направленная в противоположную сторону сила действует и на второе тело.
Сухое трение, возникающее при относительном покое тел, называют трением покоя. Сила трения покоя всегда равна по величине внешней вызывающей силе и направлена в противоположную ей сторону. Сила трения покоя не может превышать некоторого максимального значения, которое определяется по формуле:

где: μ – безразмерная величина, называемая коэффициентом трения покоя, а N – сила реакции опоры.
Если внешняя сила больше максимального значения силы трения, возникает относительное проскальзывание. Силу трения в этом случае называют силой трения скольжения. Она всегда направлена в сторону, противоположную направлению движения. Силу трения скольжения можно считать равной максимальной силе трения покоя.
Коэффициент пропорциональности μ поэтому называют также коэффициентом трения скольжения. Коэффициент трения μ – величина безразмерная. Коэффициент трения положителен и меньше единицы. Он зависит от материалов соприкасающихся тел и от качества обработки их поверхностей. Таким образом коэффициент трения является неким конкретным числом для каждой конкретной пары взаимодействующих тел. Вы не сможете найти его ни в каких таблицах. Для Вас он должен либо быть дан в задаче, либо Вы сами должны найти его в ходе решения из каких-либо формул.
Если в рамках решения задачи у Вас получается коэффициент трения больше единицы или отрицательный – Вы неправильно решаете эту задачу по динамике.
Если в условии задачи просят найти минимальную силу, под действием которой начинается движение, то ищут максимальную силу, под действием которой, движение ещё не начинается. Это позволяет приравнять ускорение тел к нулю, а значит значительно упростить решение задачи. При этом силу трения полагают равной ее максимальному значению. Таким образом рассматривается момент, при котором увеличение искомой силы на очень малую величину сразу вызовет движение.
Особенности решения задач по динамике с несколькими телами
Связанные тела
Алгоритм решения задач по динамике в которых рассматриваются несколько тел связанных нитями:
- Сделать рисунок.
- Записать второй закон Ньютона для каждого тела в отдельности.
- Если нить нерастяжима (а так в большинстве задач и будет), то ускорения всех тел будут одинаковы по модулю.
- Если нить невесома, блок не имеет массы, трение в оси блока отсутствует, то сила натяжения одинакова в любой точке нити.
Движение тела по телу
В задачах этого типа важно учесть, что сила трения на поверхности соприкасающихся тел действует и на верхнее тело, и на нижнее тело, то есть силы трения возникают парами. При этом они направлены в разные стороны и имеют равную величину, определяемую весом верхнего тела. Если нижнее тело тоже движется, то необходимо учитывать, что на него также действует сила трения со стороны опоры.
Вращательное движение
При движении тела по окружности независимо от того, в какой плоскости происходит движение, тело будет двигаться с центростремительным ускорением, которое будет направлено к центру окружности, по которой движется тело. При этом понятие окружность не надо воспринимать буквально. Тело может проходить только дугу окружности (например, двигаться по мосту). Во всех задачах этого типа одна из осей обязательно выбирается по направлению центростремительного ускорения, т.е. к центру окружности (или дуги окружности). Вторую ось целесообразно направить перпендикулярно первой. В остальном алгоритм решения этих задач совпадает с решением остальных задач по динамике:
1. Выбрав оси, записать закон Ньютона в проекциях на каждую ось, для каждого из тел, участвующих в задаче, или для каждой из ситуаций, описываемых в задаче.
2. Если это необходимо, дополнить систему уравнений нужными уравнениями из других тем по физике. Особенно хорошо нужно помнить формулу для центростремительного ускорения:

3. Решить полученную систему уравнений математическими методами.
Так же есть ряд задач на вращение в вертикальной плоскости на стержне или нити. На первый взгляд может показаться, что такие задачи будут одинаковы. Это не так. Дело в том, что стержень может испытывать деформации как растяжения, так и сжатия. Нить же невозможно сжать, она сразу прогибается, а тело на ней просто проваливается.
Движение на нити. Так как нить только растягиваться, то при движении тела на нити в вертикальной плоскости в нити будет возникать только деформация растяжения и, как следствие, сила упругости, возникающая в нити, будет всегда направлена к центру окружности.
Движение тела на стержне. Стержень, в отличие от нити, может сжиматься. Поэтому в верхней точке траектории скорость тела, прикрепленного к стержню, может быть равна нулю, в отличии от нити, где скорость должна быть не меньше определенного значения, чтобы нить не сложилась. Силы упругости, возникающие в стержне, могут быть направлены как к центру окружности, так и в противоположную сторону.
Поворот машины. Если тело движется по твердой горизонтальной поверхности по окружности (например, автомобиль проходит поворот), то силой, которая удерживает тело на траектории, будет являться сила трения. При этом сила трения направлена в сторону поворота, а не против него (наиболее частая ошибка), она помогает машине поворачивать. Например, когда машина поворачивает направо, сила трения направлена в сторону поворота (направо).
Закон всемирного тяготения. Спутники
Все тела притягиваются друг к другу с силами, прямо пропорциональными их массам и обратно пропорциональными квадрату расстояния между ними. Таким образом закон всемирного тяготения в виде формулы выглядит следующим образом:

Такая запись закона всемирного тяготения справедлива для материальных точек, шаров, сфер, для которых r измеряется между центрами. Коэффициент пропорциональности G одинаков для всех тел в природе. Его называют гравитационной постоянной. В системы СИ он равен:

Одним из проявлений силы всемирного тяготения является сила тяжести. Так принято называть силу притяжения тел к Земле или другой планете. Если M – масса планеты, Rп – ее радиус, то ускорение свободного падения у поверхности планеты:

Если же удалиться от поверхности Земли на некоторое расстояние h, то ускорение свободного падения на этой высоте станет равно (при помощи нехитрых преобразований можно также получить соотношение между ускорением свободного падения на поверхности планеты и ускорением свободного падения на некоторой высоте над поверхностью планеты):
Рассмотрим теперь вопрос об искусственных спутниках планет. Искусственные спутники движутся за пределами атмосферы (если таковая у планеты имеется), и на них действуют только силы тяготения со стороны планеты. В зависимости от начальной скорости траектория космического тела может быть различной. Мы рассмотрим здесь только случай движения искусственного спутника по круговой орбите практически на нулевой высоте над планетой. Радиус орбиты таких спутников (расстояние между центром планеты и точкой где находится спутник) можно приближенно принять равным радиусу планеты Rп. Тогда центростремительное ускорение спутника, сообщаемое ему силами тяготения, приблизительно равно ускорению свободного падения g. Скорость спутника на орбите вблизи поверхности (на нулевой высоте над поверхностью планеты) называют первой космической скоростью. Первая космическая скорость находится по формуле:

Движение спутника можно рассматривать как свободное падение, подобное движению снарядов или баллистических ракет. Различие заключается только в том, что скорость спутника настолько велика, что радиус кривизны его траектории равен радиусу планеты. Для спутников, движущихся по круговым траекториям на значительном удалении от планеты, гравитационное притяжение ослабевает обратно пропорционально квадрату радиуса r траектории. Скорость спутника в таком случае находится с помощью формулы:
Закон Кеплера для периодов обращения двух тел вращающихся вокруг одного притягивающего центра:

Если речь идёт о планете Земля, то нетрудно подсчитать, что при радиусе r орбиты, равном приблизительно 6,6RЗ, период обращения спутника окажется равным 24 часам. Спутник с таким периодом обращения, запущенный в плоскости экватора, будет неподвижно висеть над некоторой точкой земной поверхности. Такие спутники используются в системах космической радиосвязи. Орбита с радиусом r = 6,6R3 называется геостационарной.
Как успешно подготовиться к ЦТ по физике и математике?
Для того чтобы успешно подготовиться к ЦТ по физике и математике, среди прочего, необходимо выполнить три важнейших условия:
- Изучить все темы и выполнить все тесты и задания приведенные в учебных материалах на этом сайте. Для этого нужно всего ничего, а именно: посвящать подготовке к ЦТ по физике и математике, изучению теории и решению задач по три-четыре часа каждый день. Дело в том, что ЦТ это экзамен, где мало просто знать физику или математику, нужно еще уметь быстро и без сбоев решать большое количество задач по разным темам и различной сложности. Последнему научиться можно только решив тысячи задач.
- Выучить все формулы и законы в физике, и формулы и методы в математике. На самом деле, выполнить это тоже очень просто, необходимых формул по физике всего около 200 штук, а по математике даже чуть меньше. В каждом из этих предметов есть около десятка стандартных методов решения задач базового уровня сложности, которые тоже вполне можно выучить, и таким образом, совершенно на автомате и без затруднений решить в нужный момент большую часть ЦТ. После этого Вам останется подумать только над самыми сложными задачами.
- Посетить все три этапа репетиционного тестирования по физике и математике. Каждый РТ можно посещать по два раза, чтобы прорешать оба варианта. Опять же на ЦТ, кроме умения быстро и качественно решать задачи, и знания формул и методов необходимо также уметь правильно спланировать время, распределить силы, а главное правильно заполнить бланк ответов, не перепутав ни номера ответов и задач, ни собственную фамилию. Также в ходе РТ важно привыкнуть к стилю постановки вопросов в задачах, который на ЦТ может показаться неподготовленному человеку очень непривычным.
Успешное, старательное и ответственное выполнение этих трех пунктов, а также ответственная проработка итоговых тренировочных тестов, позволит Вам показать на ЦТ отличный результат, максимальный из того, на что Вы способны.
Нашли ошибку?
Если Вы, как Вам кажется, нашли ошибку в учебных материалах, то напишите, пожалуйста, о ней на электронную почту (адрес электронной почты здесь). В письме укажите предмет (физика или математика), название либо номер темы или теста, номер задачи, или место в тексте (страницу) где по Вашему мнению есть ошибка. Также опишите в чем заключается предположительная ошибка. Ваше письмо не останется незамеченным, ошибка либо будет исправлена, либо Вам разъяснят почему это не ошибка.


ЗАПРЕЩЕНО использование представленных на сайте материалов или их частей в любых коммерческих целях, а также их копирование, перепечатка, повторная публикация или воспроизведение в любой форме. Нарушение прав правообладателей преследуется по закону. Подробнее.
http://www.sites.google.com/site/tehmehprimizt/lekcii/teoreticeskaa-mehanika/dinamika/aksiomy-dinamiki
http://educon.by/index.php/materials/phys/dinamika