44 уравнение равновесия эдс и напряжения мпт
3.2.2. Уравнения равновесия ЭДС и МДС трансформатора*
На основании Т-образной схемы замещения рис.1.2а можно записать следующие уравнения равновесия напряжений (ЭДС) трансформатора:
U 1 = –E 1 +I 1 (R 1 +jX 1 )= –E 1 +I 1 Z 1 , (1)
U 2 ’= E 2 ’ – I 2 ’ (R 2 ’+jX 2 ’ )= E 2 ’ – I 2 ’Z 2 ’ . (2)
Особенностью работы трансформатора является то, что ввиду относительной малости сопротивлений R 1 и X 1 падение напряжения I 1 Z 1 в диапазоне нормальных нагрузок относительно мало, вследствие чего, согласно уравнению (1),
U 1 . В свою очередь действующее значение ЭДС E1 пропорционально амплитуде магнитого потока в магнитопроводе Ф m
E 1 = 4,44f 1 W 1 Ф m , (3)
где W1 — число витков фазы первичной обмотки.
Как следует из (3) значение магнитного потока определяется в основном первичным напряжением:
U 1 /4,44f 1 W 1 (4)
и при U1 = const также Фm
При холостом ходе трансформатор потребляет из сети такой ток I x = I 1 , который нужен для создания необходимого потока при данном напряжении U 1 .
Значение потока Ф m всегда таково, что индуктируемая им ЭДС E 1 вместе с падением напряжения I 1 Z 1 в соответствии с уравнением (1) уравновешивают приложенное напряжение U 1 .
При подключении к вторичной обмотке нагрузки в ней протекает ток I 2 . Магнитодвижущая сила вторичной обмотки (ее число витков W 2 )
W 2 I 2 = W 1 I 2 ’ (5)
стремится создать в магнитопроводе свой поток и изменить, таким образом, поток, существовавший в режиме холостого хода. Однако, как отмечено выше, при U 1 =const этот поток существенным образом измениться не может (см. формулу 4). Поэтому первичная обмотка будет потреблять из сети, кроме намагничивающего тока I x , дополнительный ток (–I 2 ’) такой величины, что создаваемая им МДС (–W 1 I 2 ’) уравновесит МДС W 1 I 2 ’ вторичной обмотки.
Ток (–I 2 ’), уравновешивающий в магнитном отношении вторичный ток I 2 ’, называется нагрузочной составляющей первичного тока.
Полный первичный ток I 1 состоит из намагничивающей I x и нагрузочной (–I 2 ’) составляющих:
Равенство (6) называется уравнением равновесия МДС обмоток приведенного трансформатора.
Умножив равенство (6) на число витков первичной обмотки W 1 , после несложных преобразований, запишем:
W 1 I 1 + W 2 I 2 = W 1 I x . (7)
На основании уравнения (7) справедливо утверждение: поток магнитопровода трансформатора создается суммой МДС первичной W 1 I 1 и вторичной W 2 I 2 обмоток при нагрузке трансформатора или, что тоже, — МДС первичной обмотки W1Ix при холостом ходе трансформатора.
Комплексные уравнения (1), (2) и (6) являются уравнениями равновесия ЭДС (напряжений) и МДС трансформатора при установившемся симметричном режиме работы.
3.2.3. Векторные диаграммы трансформатора
Векторные диаграммы позволяют проанализировать работу трансформатора. Эти диаграммы являются графическим изображением уравнений (1), (2) и (6).
На рис.1.3а изображена векторная диаграмма трансформатора для случая смешанной активно-индуктивной R-L нагрузки. Ток I 2 ’ отстает от ЭДС E 2 ’ на некоторый угол y 2 , значение которого определяется характером нагрузки.
Из диаграммы рис.1.3а следует, что при U 1 = const и неизменном характере нагрузки ( y 2 = const) увеличение величины нагрузки (то есть тока I 2 ’) вызывает уменьшение вторичного напряжения U 2 ’.
На рис.1.3б приведена векторная диаграмма для случая смешанной активно-емкостной R-C нагрузки, когда вектор тока I 2 ’ опережает вектор E 2 ’ на угол y 2 .
Из диаграммы рис.1.3б следует, что при U 1 = const и неизменном характере нагрузки ( y 2 = const) увеличение величины нагрузки (то есть тока I 2 ’) может вызвать увеличение вторичного напряжения U 2 ’.
Диаграммы, представленные на рис.1.3 полностью отражают рабочие процессы, происходящие в трансформаторе, однако производить расчет по этим диаграммам затруднительно. Объясняется это и тем, что индуктивные сопротивления рассеяния обмоток X 1 и X 2 определить опытным путем не представляется возможным. Однако опытным путем находится сумма сопротивлений X к =X 1 + X 2 ’.
Упрощенная векторная диаграмма соответствует упрощенной схеме замещения трансформатора (см. рис.1.2б), в которой намагничивающий ток I x принят равным нулю (это правомерно, так как ток холостого хода I x составляет несколько процентов от номинального первичного тока). В этой схеме трансформатор эквивалентируется сопротивлением Z к =Z 1 + Z 2 ’.
Комплексные уравнения равновесия ЭДС (напряжений) и МДС трансформатора при установившемся симметричном режиме работы для упрощенной схемы замещения записываются в виде:
U 1 = –E 1 +I 1 Z 1 , U 1 = –U 2 ’ + I 1 Z 2 ’+I 1 Z 1 = –U 2 ’ + I 1 (Z 1 + Z 2 ’) = –U 2 ’ + I 1 Z к (1)
Перепишем уравнение (2) с учетом (6а):
–E 2 ’= – E 1 = –U 2 ’ + I 1 Z 2 ’ . (8)
Подставив (8) в (1), получим комплексное уравнение в соответствии с которым строится упрощенная векторная диаграмма трансформатора:
U 1 = –U 2 ’ + I 1 Z 2 ’+I 1 Z 1 = –U 2 ’ + I 1 (Z 1 + Z 2 ’) = –U 2 ’ + I 1 Z к , (9)
где Z к = R к +jX к = (R 1 + R 2 ’) +j(X 1 + X 2 ’) — сопротивления обмоток трансформатора; сопротивления Z к , R к , X к определяются из опыта короткого замыкания трансформатора.
На рис.1.4 изображена упрощенная векторная диаграмма трансформатора при активно-индуктивной R-L нагрузке. Из этой диаграммы нетрудно сделать вывод о влиянии характера нагрузки (угол y 2 ) на величину напряжения U 2 ’.
____________________________________
* В описаниях работ комплексные величины в тексте отмечены символами с подчёркиванием, на рисунке — с точкой
Схема замещения трансформатора. Уравнения напряжений и ЭДС
Систему уравнений описывающую электромагнитные процессы в трансформаторе, можно свести к одному уравнению, если учесть, что Е1=kЕ2, и положить

При этом параметры Rmи Хт следует выбрать так, чтобы в режиме холостого хода, когда ЭДС Е1 практически равна номинальному напряжению U1, ток

по модулю равнялся действующему значению тока холостого хода, а его мощность  — мощности, забираемой трансформатором из сети при холостом ходе.
— мощности, забираемой трансформатором из сети при холостом ходе.
Решим систему уравнений относительно первичного тока

В соответствии с уравнением (2.31) трансформатор можно заменить схемой замещения (рис. 2.18).
Эквивалентное сопротивление этой схемы

где 
Схема замещения трансформатора представляет собой сочетание двух схем замещения — первичной и вторичной обмоток, соединенных между собой в точках а и б. В цепи первичной обмотки включены сопротивленияR1и X1, в цепи вторичной обмотки — сопротивления R’2и Х’2. Участок схемы замещения между точками а и б, по которому проходит ток I0, называют намагничивающим контуром. На вход схемы замещения подают напряжение U1, к выходу ее подключают переменное сопротивление нагрузки Zn, к которому приложено напряжение -U2.

| Рис. 2.18.Схема замещения трансформатора |
Сопротивления Z2 (и его составляющие R’2=R2k 2 и X’2=X2k 2 ), а также Z’n называют соответственно сопротивлениями вторичной обмотки и нагрузки, приведенными к первичной обмотке. Аналогично приведенными называют значения ЭДС и тока: 
Полная мощность приведенного контура вторичной обмотки в схеме замещения равна мощности вторичной обмотки реального трансформатора:  Мощность электрических потерь в приведенном вторичном контуре этой схемы равна мощности потерь во вторичной обмотке реального трансформатора:
Мощность электрических потерь в приведенном вторичном контуре этой схемы равна мощности потерь во вторичной обмотке реального трансформатора: 

Рис. 2.19. Эквивалентные схемы для приведения вторичной обмотки к первичной (а, б)
Относительные падения напряжений в активном и индуктивном сопротивлениях приведенного вторичного контура также остаются неизменными, как и в реальном трансформаторе:

Физически переход от реального трансформатора к имитирующей его электрической схеме замещения можно представить с помощью следующих четырех этапов (рис. 2.19).
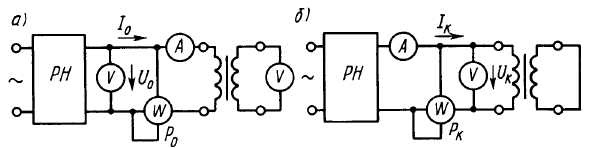
Рис. 2.20. Схемы проведения опытов холостого хода (а) и короткого
1. Первый этап — реальный трансформатор заменяютидеализированным трансформатором Tp, в цепь первичной обмотки которого включают сопротивления R1 и X2, а в цепь вторичной обмотки — R2 и Х2 (рис. 2.19, а).
2. Второй этап — параметры вторичной обмотки приводят к параметрам первичной. В результате ЭДС обмоток оказываются равными: Е1 = Е’2.
3. Третий этап — соединяют эквипотенциальные точки а и a’ б и б’ (рис. 2.19, б).
4. Четвертый этап — включают дополнительный намагничивающий контур, по которому проходит составляющая I0 первичного тока.
На практике приводят как вторичную обмотку к первичной, так и первичную ко вторичной в зависимости от того, какие процессы интересуют инженера. Параметры схемы замещения можно считать постоянными только при небольших изменениях первичного напряжения, т. е. в пределах ±10%. Это в первую очередь относится к намагничивающему контуру с
сопротивлением  , параметры которого определяют ток I0. С увеличением напряжения происходит насыщение сталимагнитопровода, вследствие чего уменьшается величинаХт (намагничивающий ток резко возрастает).
, параметры которого определяют ток I0. С увеличением напряжения происходит насыщение сталимагнитопровода, вследствие чего уменьшается величинаХт (намагничивающий ток резко возрастает).
Уравнение равновесия напряжений фазы обмотки якоря неявнополюсного СГ.
Уравнение равновесия напряжений фазы обмотки якоря явнополюсного СГ.
Уравнение равновесия напряжений СГ выглядит:

Здесь Е0 – ЭДС в фазе статора наводимая потоком обмотки возбуждения
Ead – ЭДС индуцируемая в обмотке якоря потоком продольной реакции якоря Фad
Eaq — ЭДС индуцируемая в обмотке якоря потоком поперечной реакции якоря Фaq
Eas — ЭДС рассеяния индуцируемая в фазе обмотке якоря потоком рассеяния обмотки якоря Фas
ra – активное сопротивление фазы обмотки якоря
Уравнение равновесия напряжений фазы обмотки якоря неявнополюсного СГ.
Уравнение равновесия напряжений СГ выглядит:

Здесь Е0 – ЭДС в фазе статора наводимая потоком обмотки возбуждения
 — индуктивное сопротивление рассеяния фазы обмотки статора
— индуктивное сопротивление рассеяния фазы обмотки статора
 — индуктивное сопротивление продольной реакции якоря в следствии равномерности воздушного зазора
— индуктивное сопротивление продольной реакции якоря в следствии равномерности воздушного зазора 
ra – активное сопротивление фазы обмотки якоря
6. Векторные диаграммы синхронного генератора.


7. Характеристика холостого хода синхронного генератора.

8. Внешняя характеристика синхронного генератора.

9. Регулировочная характеристика синхронного генератора.

10. Характеристика 3-х фазного короткого замыкания синхронного генератора.
 Характеристика трехфазного короткого замыкания представляет собой зависимость тока якоря при коротком замыкании от тока возбуждения IK= f(IB) при n=const (1!!)
Характеристика трехфазного короткого замыкания представляет собой зависимость тока якоря при коротком замыкании от тока возбуждения IK= f(IB) при n=const (1!!)
11. Параллельная работа синхронных генераторов.
В том случае, когда мощность потребителя становится больше номинальной мощности работающего генератора, параллельно ему включают другой генератор.
Для включения синхронного генератора на параллельную работу с электрической сетью или другим, уже работающим синхронным генератором необходимо выполнить следующие условия:
напряжение подключаемой машины должно быть равно напряжению сети или работающей машины;
частота подключаемого генератора должна быть равна частоте сети;
напряжения всех фаз подключаемой машины должны быть противоположны (по фазе) напряжениям соответствующих фаз сети или работающей машины;
для подключения на параллельную работу трехфазного синхронного генератора необходимо также обеспечить одинаковое чередование фаз подключаемой машины и сети.
12. Угловая характеристика синхронного двигателя.
При холостом ходе двигателя оси ротора и статора совпадают,q= 0, соответственно M= 0,P= 0. С увеличением момента сопротивления нагрузки на валу ротор отстает от магнитного поля, а электрическая мощность P и электромагнитный момент M возрастают. Причем, в отличие от генераторного режима, M является полезным моментом, вращающим вал ротора, а активная мощность теперь потребляется двигателем от сети. При изменении угла q от 0 до +90°двигатель работает устойчиво. Если еще увеличить момент сопротивления нагрузки, то уголqпревысит значение +90°, а M,P начнут уменьшаться. При этом ротор начнет вращаться несинхронно с магнитным полем. Тогда двигатель перестанет работать параллельно с сетью —выпадет из синхронизма, что может вызвать нежелательные явления и рассматриваться как аварийный режим.

13. Механическая характеристика синхронного двигателя.

14. Способы синхронного генератора с сетью. Есть 2 способа.
1 При включении синхронного генератора на параллельную работу с сетью по способу точной синхронизации стремятся к тому, чтобы при включении не возникало больших бросков тока. Большие толчки тока вызывают большие моменты, действующие как на ротор, так и на статор, и силы, которые могут привести к разрушению обмотки статора.
2 При самосинхронизации неизбежно возникновение значительного толчка тока, так как включение невозбужденного генератора в сеть с напряжением UС, эквивалентно внезапному короткому замыканию этого генератора при работе на холостом ходу с Е0=UС.Однако толчок тока при самосинхронизации будет все же меньше, так как, кроме сопротивления генератора, в цепи будут действовать также сопротивления элементов сети (повышающие трансформаторы, линия и т. д.).
15. U – образная характеристика синхронного генератора.
Предположим, что генератор после подключения на сеть работает без нагрузки и его ЭДС  уравновешивает напряжение сети
уравновешивает напряжение сети  . Е этом увеличить ток в обмотке возбуждения, т. е. перевозбудитьмашину, то ЭДС
. Е этом увеличить ток в обмотке возбуждения, т. е. перевозбудитьмашину, то ЭДС  увеличится до значения
увеличится до значения  и в цепи генератора появится избыточная ЭДС
и в цепи генератора появится избыточная ЭДС  (рис. 21.10, а),вектор которой совпадает по направлению с вектором ЭДС . Ток
(рис. 21.10, а),вектор которой совпадает по направлению с вектором ЭДС . Ток  , вызванный ЭДС
, вызванный ЭДС  , будет отставать от нее по фазе на 90° (поскольку
, будет отставать от нее по фазе на 90° (поскольку  ). По отношению к ЭДС этот ток также будет отстающим (индуктивным). С увеличением перевозбуждения значение реактивного (индуктивного) тока увеличится.
). По отношению к ЭДС этот ток также будет отстающим (индуктивным). С увеличением перевозбуждения значение реактивного (индуктивного) тока увеличится.
Если же после того, как генератор подключен к сети, уменьшить ток возбуждения, т. е. недовозбудить машину, то ЭДС уменьшится до значения  и в цепи генератора опять будет действовать избыточная ЭДС
и в цепи генератора опять будет действовать избыточная ЭДС  . Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети (рис. 21.10, б), и поэтому ток , вызванный этой ЭДС и отстающим от нее по фазе на 90°, будет опережающим (емкостным) по отношению к ЭДС генератора .
. Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети (рис. 21.10, б), и поэтому ток , вызванный этой ЭДС и отстающим от нее по фазе на 90°, будет опережающим (емкостным) по отношению к ЭДС генератора .

Это сопровождается появлением в обмотке статора реактивного тока  , которым по отношению к ЭДС является отстающим (индуктивным). Вы званная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток , а вызванная этим током продольно-намагничивающая реакция якоря компенсирует недостающую МДС возбуждения.
, которым по отношению к ЭДС является отстающим (индуктивным). Вы званная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток , а вызванная этим током продольно-намагничивающая реакция якоря компенсирует недостающую МДС возбуждения.

16. Пуск синхронных двигателей.
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя. Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами раскрутить другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
17. Сравнение синхронных и асинхронных двигателей.
Чтобы остановить выбор на синхронном или асинхронном двигателе для приведения во вращение того или иного производственного механизма, необходимо иметь в виду следующее.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами,. Использование некоторых из этих способов для регулирования частоты вращения синхронных двигателей в принципе невозможно, а некоторых связано с большими конструктивными и эксплуатационными трудностями. Учитывая это, следует иметь в виду, что синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cos φ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представлет собой активно-индуктивную нагрузку и имеет всегда cos φ
http://lektsii.org/6-63473.html
http://poisk-ru.ru/s15318t7.html