Digiratory
Лаборатория автоматизации и цифровой обработки сигналов
Устойчивость нелинейных систем
Анализ устойчивости систем является одним из важнейших этапов проектирования систем управления, однако при анализе нелинейных, строго говоря, нет метода отвечающего критериям необходимости и достаточности, а критерии являются, как правило только достаточным (для устойчивости). Исходя из этого, для некоторых систем невозможно однозначно говорить о неустойчивости.
В классической теории управления имеется два основных аналитических метода: первый и второй методы Ляпунова, а также достаточно большое количество модификаций второго метода, как не связанного с линеаризацией.
Рассмотрим применение классических методов Ляпунова.
Первый метод Ляпунова
Позволяет судить об устойчивости положения равновесия по линеаризованным уравнениям. Метод основан на утверждениях:
- если собственные значения линеаризованной системы имеют отрицательные действительные части (линеаризованная система асимптотически устойчива), то положение равновесия нелинейной системы устойчиво «в малом»;
- если среди собственных значений линеаризованной системы имеются «правые», то положение равновесия нелинейной системы неустойчиво;
- если имеются некратные собственные значения на мнимой оси, а остальные — «левые», то в этом критическом случае по линеаризованной модели нельзя судить об устойчивости положения равновесия нелинейной системы.
Таким образом для анализа системы по первому методу Ляпунова необходимо:
- Найти положение равновесия системы — движений в системе нет (т.е. скорости и ускорения равны нулю) \[ \frac <\mathrm
v_><\mathrm t>= <0>\] - Линеаризовать систему в окрестности точки равновесия
- Записать полученное линеаризованное дифференциальное уравнение в матричной форме (составить матрицу А)
- Составить характеристический полином линеаризованной системы: \[
- Найти корни характеристического полинома. По виду корней сделать заключение о характере процессов в системе.
Основными недостатками первого метода Ляпунова являются:
- Если имеется корень на мнимой оси, то невозможно сказать о поведении процессов в системе.
- Возможно говорить только об устойчивости «в малом», т.е. при больших отклонениях от положения равновесия система может быть неустойчивой.
Пример 1.
Исследуем систему описываемую дифференциальными уравнениями:
Шаг 1. Положение равновесия:
Для нахождения точек равновесия левые части уравнений приравниваются к 0, что эквивалентно тому, что переменные состояния являются константами, а все их производные равны 0.
Шаг 2. Линеаризация для малых отклонений
Для линеаризации малых отклонений в точке равновесия старшие степени переменных, входящих в уравнения принимаются равными нулю.
Шаг 3. Линеаризованное управление в матричной форме
Преобразуем полученную линейную систему уравнений в матричный вид.
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Приравниваем характеристический полином к 0 и находим корни уравнения.
Заключение об устойчивости системы
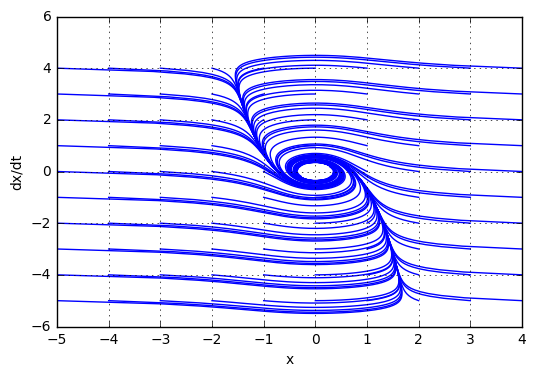
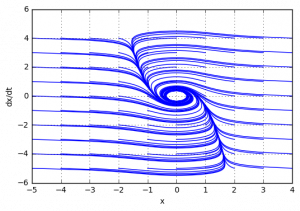
в данном примере при линеаризации система имеет два корня с отрицательной вещественной частью, т.е. мы можем сказать, что система устойчива «в малом» (при больших отклонениях система может быть неустойчива).
Подтвердим теоретический вывод компьютерным моделированием (построением фазового портрета)
При этом, при начальных условиях, находящиеся дальше от точки равновесия, система становится неустойчивой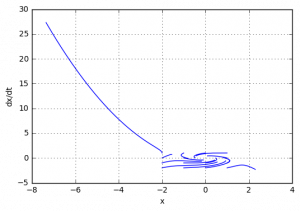
Пример 2. Нелинейный осциллятор
В качестве второго примера рассмотрим нелинейный осцилятор описываемый системой дифференциальных уравнений:
Аналогично первому примеру выполняем последовательность шагов
Шаг 1. Положение равновесия:
Шаг 2. Линеаризация для малых отклонений
Шаг 3. Линеаризованное управление в матричной форме
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Заключение об устойчивости системы
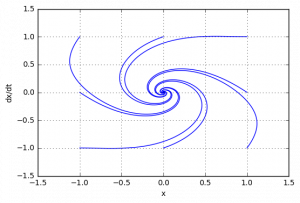
Рассматриваемая система является критическим случаем о ее устойчивости невозможно судить по линеаризованным уравнениям, применяемым в первом методе Ляпунова.
Второй метод Ляпунова
Второй метод Ляпунова не связан с линеаризацией системы, поэтому также называется прямым методом.
Для начала необходимо ввести понятия знакоопределенной, знакопостоянной и знакопеременной функций. Пусть имеется функция нескольких переменных:
Функция \(V \) называется знакоопределенной в некоторой области, если она во всех точках этой области вокруг начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме только самого начала координат
\[ \left ( V\left ( \bar <0>\right )=0 \right ) \]
Функция \(V \) называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция \(V \) называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Теорема Ляпунова об устойчивости нелинейных систем
Если при заданных в форме
уравнениях системы n-го порядка можно подобрать такую знакоопределенную функцию Ляпунова
чтобы ее производная по времени
тоже была знакоопределенной (или знакопостоянной), но имела знак противоположный знаку \(V\), то данная система устойчива.
Для упрощения скажем, что функция Ляпунова должна быть положительной знакоопределенной функцией. Тогда условия теоремы Ляпунова будут выглядеть следующим образом:
Для устойчивости положения равновесия достаточно существования дифференцируемой функции
называемой функцией Ляпунова, удовлетворяющей в окрестности начала координат следующим условиям:
- \(V\left ( v_<1>, v_<2>,…, v_
\right ) \geq 0\) причем \(V=0\) лишь при следующем условии, означающем что функция \(V\) имеет строгий минимум в начале координат. \[ \bar = \begin v_ <1>\\ \vdots \\ v_ \end = \bar <0>\] - Производная функции по времени \[ \frac <\mathrm
V\left ( \bar \right )><\mathrm t>=\sum_ \frac<\partial V><\partial v_>\frac <\mathrm v_><\mathrm t>=\begin \frac<\partial V><\partial v_<1>> & \frac<\partial V><\partial v_<2>> & \cdots & \frac<\partial V><\partial v_>\end \begin \frac <\mathrm v_<1>><\mathrm t>\\ \frac <\mathrm v_<2>><\mathrm t>\\ \vdots \\ \frac <\mathrm v_ ><\mathrm t>\end \] в силу дифференциального уравнения \(\frac <\mathrm \bar ><\mathrm t>=\bar<\varphi >\left ( \bar \right ) \) является отрицательной знакопостоянной функцией, т.е. \[ \frac <\mathrm V\left ( \bar \right )><\mathrm t>=grad\bar \cdot \frac <\mathrm \bar ><\mathrm t>=grad\bar \cdot \bar<\varphi>\left ( \bar \right )\leq 0 \] при \(t\geq t_<0>\)
Таким образом, условия:
- \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\leq 0\) и функция \(V\left ( v_<1>, v_<2>,…, v_ \right ) \) является положительной знакоопределенной — это является достаточным условием устойчивости - \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t> \) — отрицательно определенная — это является достаточным условием асимптотической устойчивости. - \(\left \| v \right \|\rightarrow \infty : \frac <\mathrm
V\left ( \bar \right )><\mathrm t>\rightarrow \infty \) — достаточное условие устойчивости «в целом».
Для анализа системы по второму методу Ляпунова необходимо:
- Выбрать функцию Ляпунова от n переменных, где n- порядок системы.
- Найти частные производные по переменным.
- Вычислить производную функции по времени \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\). Проанализировать полученный знак производной.
Из-за того, что второй метод Ляпунова не связан с линеаризацией, он считается универсальным. Однако он имеет ряд недостатков:
- Нет общих требований по выбору функции V
- Достаточный характер утверждения (если условия не выполняются, то об устойчивости ничего сказать нельзя, а можно посоветовать подобрать другую функцию \(V \))
Пример 3. Нелинейный осциллятор
Проанализируем систему из примера (2).
Шаг 1. Функция Ляпунова
Для начала необходимо выбрать функцию Ляпунова от 2-х переменных (т.к. два вектора состояния):
Шаг 2. Частные производные
Шаг 3. Производная функции
Подставим в выражение значения исходя из ДУ:
Заключение об устойчивости системы
Исследовав систему первым методом Ляпунова мы не смогли сделать конкретный вывод об устойчивости системы, что позволил нам сделать второй метод Ляпунова. В результате мы можем сделать вывод, что система является асимптотически устойчивой.
Аналогично проверим с помощью моделирования:
Пример 4.
Рассмотрим систему, описываемую следующей системой дифференциальных уравнений:
Очевидно, что применение первого метода Ляпунова невозможно, т.к. матрица А состоит из нулей, а, следовательно, собственные значения равны нулю. Поэтому применим второй метод Ляпунова:
Шаг 1. Функция Ляпунова
Выбор функции Ляпунова второго порядка
Шаг 2. Частные производные
Шаг 3. Производная функции
При \(a=3\) имеет место асимптотическая устойчивость.
Заключение об устойчивости системы
Система является устойчивой.
Фазовый портрет системы выглядит следующим образом:
Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
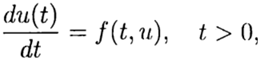
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям

Перед решением эта задача должна быть переписана в виде следующей СДУ
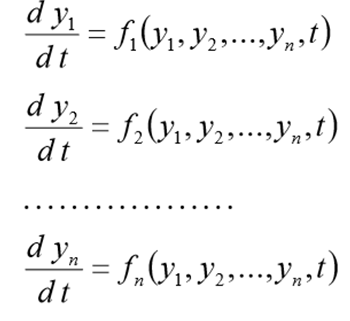 (1)
(1)
с начальными условиями

Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), . ]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2. yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций  при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений  при t=t0.
при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле

Они могут быть векторами или скалярами. По умолчанию

Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
 (2)
(2)
 (3)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке  обозначим
обозначим  . Метод сходится в точке
. Метод сходится в точке  если
если  при
при  . Метод имеет р-й порядок точности, если
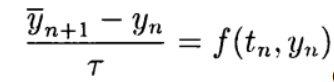
. Метод имеет р-й порядок точности, если  , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
, р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
 (4)
(4)
При  имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема
имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема  в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
 (5)
(5)
а на этапе корректора (уточнения) — схема

В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
 (6),
(6),

Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если  при
при  имеем явный метод Рунге—Кутта. Если при j>1 и
имеем явный метод Рунге—Кутта. Если при j>1 и  то
то  определяется неявно из уравнения:
определяется неявно из уравнения:
 (7)
(7)
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры  определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
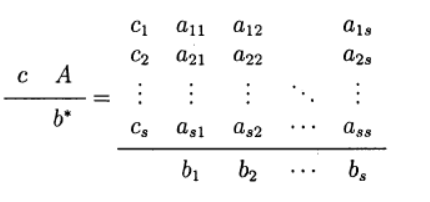
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
 (8)
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
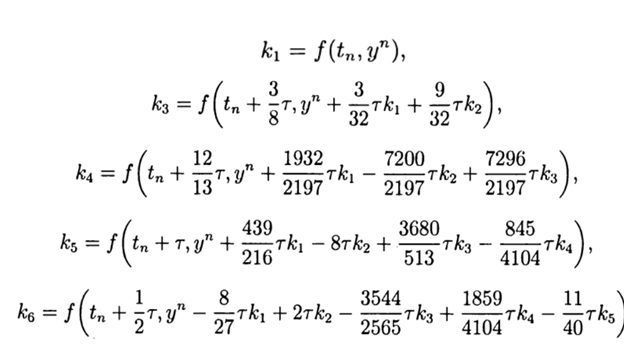 (9)
(9)
С учётом(9) общее решение имеет вид:
 (10)
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения  с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
 с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга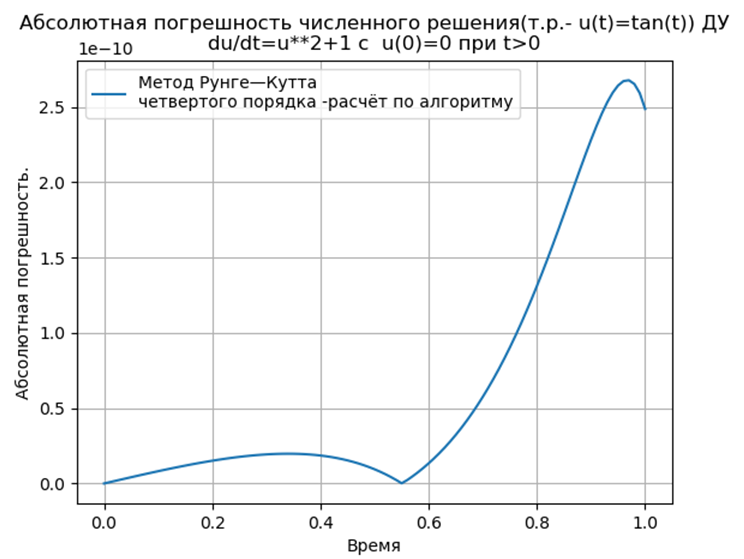


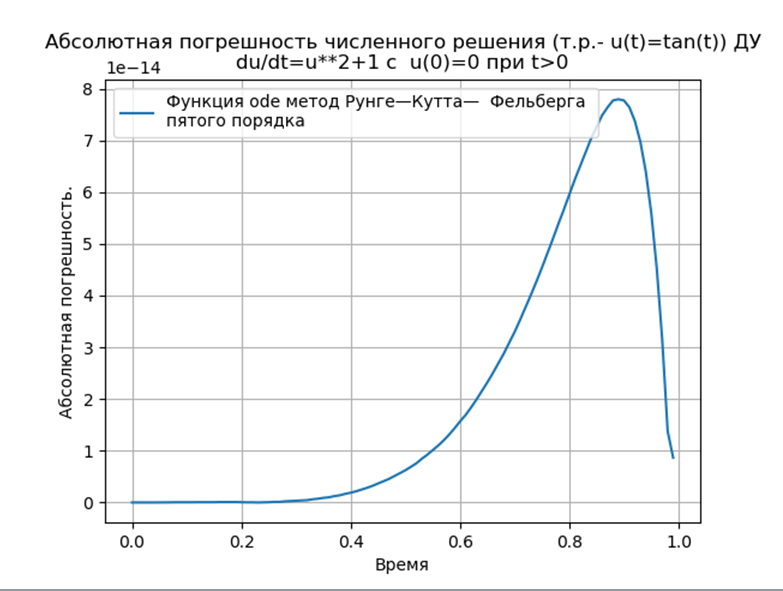
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид

где  – радиус вектор движущегося тела,
– радиус вектор движущегося тела,  – вектор скорости тела,
– вектор скорости тела,  – коэффициент сопротивления, вектор
– коэффициент сопротивления, вектор  силы веса тела массы m, g – ускорение свободного падения.
силы веса тела массы m, g – ускорение свободного падения.
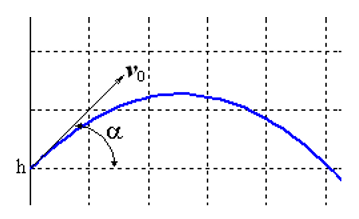
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить  , то в координатной форме мы имеем систему уравнений:
, то в координатной форме мы имеем систему уравнений:
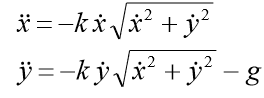
К системе следует добавить начальные условия:  (h начальная высота),
(h начальная высота),  . Положим
. Положим  . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
. Тогда соответствующая система ОДУ 1 – го порядка примет вид:

Для модельной задачи положим  . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
. Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787

Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Время на модельную задачу: 0.259927

Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
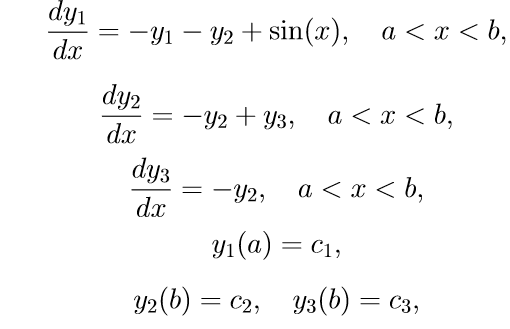 (11)
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
2. Решаем первые три однородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
3. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений: 
где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
 (12)
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878

Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
Аналитическая теория нелинейных дифференциальных уравнений, Кудряшов Н.А., 2004
Аналитическая теория нелинейных дифференциальных уравнений, Кудряшов Н.А., 2004.
Книга является введением в аналитическую теорию нелинейных дифференциальных уравнений и посвящена анализу нелинейных математических моделей и динамических систем на предмет их точного решения (интегрируемости).
Предназначена для студентов, аспирантов и научных сотрудников, интересующихся нелинейными математическими моделями, теорией солитонов, методами построения точных решений нелинейных дифференциальных уравнений, теорией уравнений Пенлеве и их высших аналогов.
Уравнение Кортевега — де Вриза для описания волн на воде.
Явление распространения волн на поверхности воды издавна привлекало к себе внимание исследователей. Это пример волн, который каждый мог наблюдать еще в детстве и который обычно демонстрируется в рамках школьного курса физики. Однако, это довольно сложный тип волн. По выражению Ричарда Фейнмана «более неудачного примера для демонстрации волн придумать трудно, ибо эти волны нисколько не похожи ни на звук, ни на свет; здесь собрались все трудности, которые могут быть в волнах» [93].
Если рассмотреть бассейн, наполненный водой, и на его поверхности создать некоторое возмущение, то по поверхности воды начнут распространяться волны. Возникновение их объясняется тем, что частицы жидкости, которые находятся вблизи впадины, при создании возмущения будут стремиться заполнить впадину, находясь под действием силы тяжести. Развитие этого явления с течением времени и приведет к распространению волны на воде. Частицы жидкости в такой волне двигаются не вверх-вниз, а приблизительно по окружностям, поэтому волны на воде не являются ни продольными, ни поперечными. Они как бы являются смесью тех и других. С глубиной, радиусы окружностей, по которым двигаются частицы жидкости, уменьшаются до тех пор, пока они не станут равными нулю [57, 66].
Если анализировать скорость распространения волны на воде, то оказывается, что она зависит от ее амплитуды. Скорость длинных волн пропорциональна корню квадратному из ускорения свободного падения умноженному на сумму амплитуды волны и глубины бассейна. Причиной возникновения таких волн является сила тяжести.
СОДЕРЖАНИЕ
Предисловие 9
Глава 1. НЕЛИНЕЙНЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ 13
1.1 Уравнение Кортевега — де Вриза для описания волн на воде 13
1.2 Простейшие решения уравнения Кортевега — де Вриза 23
1.3 Модель для описания возмущений в цепочке одинаковых масс 26
1.4 Простейшие решения модифицированного уравнения Кортевега — де Вриза 32
1.5 Фазовая и групповая скорости волн 35
1.6 Нелинейное уравнение Шредингера для огибающей волнового пакета 39
1.7 Уединенные волны, описываемые нелинейным уравнением Шредингера и групповой солитон 42
1.8 Уравнение sin-Гордона для описания дислокаций в твердом теле 44
1.9 Простейшие решения уравнения sin-Гордона и топологический солитон 48
1.10 Нелинейное уравнение переноса и уравнение Бюргерса 51
1.11 Модель Хенона — Хейлеса 57
1.12 Система Лоренца 60
1.13 Задачи и упражнения к главе 1 68
Глава 2. АНАЛИТИЧЕСКИЕ СВОЙСТВА ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 71
2.1 Классификация особых точек функций комплексной переменной 71
2.2 Неподвижные и подвижные особые точки 74
2.3 Уравнения, не имеющие решений с критическими подвижными особыми точками 76
2.4 Задача Ковалевской о волчке 82
2.5 Определение свойства Пенлеве и уравнения Пенлеве 85
2.6 Второе уравнение Пенлеве для описания электрического поля в полупроводниковом диоде 87
2.7 Алгоритм Ковалевской анализа дифференциальных уравнений 91
2.8 Локальные представления решений уравнений типа Пенлеве 96
2.9 Метод Пенлеве для анализа дифференциальных уравнений 100
2.10 Трансцендентная зависимость решений первого уравнения Пенлеве 106
2.11 Неприводимость уравнений Пенлеве 111
2.12 Преобразования Бэклунда для решений второго уравнения Пенлеве 113
2.13 Рациональные и специальные решения второго уравнения Пенлеве 114
2.14 Дискретные уравнения Пенлеве 116
2.15 Асимптотические решения первого и второго уравнений Пенлеве 118
2.16 Линейные представления уравнений Пенлеве 120
2.17 Алгоритм Конта — Форди — Пикеринга для проверки уравнений на свойство Пенлеве 122
2.18 Примеры анализа уравнений методом возмущений Пенлеве 125
2.19 Тест Пенлеве для системы уравнений Хенона-Хейлеса 128
2.20 Точно решаемые случаи системы Лоренца 131
2.21 Задачи и упражнения к главе 2 135
Глава 3. СВОЙСТВА НЕЛИНЕЙНЫХ УРАВНЕНИЙ В ЧАСТНЫХ ПРОИЗВОДНЫХ 138
3.1 Интегрируемые системы 138
3.2 Преобразование Коула — Хопфа для уравнения Бюргерса 141
3.3 Преобразование Миуры и пара Лакса для уравнения Корте-вега — де Вриза 144
3.4 Законы сохранения для уравнения Кортевега — де Вриза 146
3.5 Отображения и преобразования Бэклунда 149
3.6 Преобразования Бэклунда для уравнения sin-Гордона 151
3.7 Преобразования Бэклунда для уравнения Кортевега — де Вриза 153
3.8 Семейство уравнений Кортевега — де Вриза 155
3.9 Семейство уравнений АКНС 157
3.10 Тест Абловица — Рамани — Сигура для нелинейных уравнений в частных производных 160
3.11 Метод Вайса — Табора — Карневейля для анализа нелинейных уравнений 163
3.12 Пенлеве-анализ уравнения Бюргерса методом ВТК 165
3.13 Анализ уравнения Кортевега — де Вриза 168
3.14 Построение пары Лакса для уравнения Кортевега — де Вриза методом ВТК 169
3.15 Анализ модифицированного уравнения Кортевега — де Вриза 171
3.16 Усеченные разложения, как отображения решений нелинейных уравнений 172
3.17 Инвариантный пенлеве-анализ 174
3.18 Применение инвариантного пенлеве-анализа для нахождения пар Лакса 176
3.19 Соотношения между основными точно решаемыми нелинейными уравнениями 179
3.20 Семейство уравнений Бюргерса 187
3.21 Задачи и упражнения к главе 3 189
Глава 4. ТОЧНЫЕ РЕШЕНИЯ НЕЛИНЕЙНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 193
4.1 Применение усеченных разложений для построения частных решений неинтегрируемых уравнений 193
4.2 Точные решения уравнения Бюргерса — Хаксли 197
4.3 Частные решения уравнения Бюргерса — Кортевега — де Вриза 205
4.4 Уединенные волны, описываемые уравнением Курамото — Сивашинского 208
4.5 Кноидальные волны, описываемые уравнением Курамото — Сивашинского 215
4.6 Частные решения простейшего нелинейного волнового уравнения пятого порядка 217
4.7 Точные решения нелинейного уравнения пятого порядка для описания волн на воде 220
4.8 Решения уравнения Кортевега — де Вриза пятого порядка в переменных бегущей волны 230
4.9 Точные решения модели Хенона — Хейлеса 235
4.10 Метод нахождения рациональных решений некоторых точно решаемых нелинейных уравнений 237
4.11 Задачи и упражнения к главе 4 241
Глава 5. ВЫСШИЕ АНАЛОГИ УРАВНЕНИЙ ПЕНЛЕВЕ И ИХ СВОЙСТВА 244
5.1 Анализ уравнений четвертого порядка на свойство Пенлеве 244
5.2 Уравнения четвертого порядка, прошедшие тест Пенлеве 251
5.3 Трансценденты, определяемые нелинейными уравнениями четвертого порядка 253
5.4 Локальные представления решений для уравнений четвертого порядка 258
5.5 Асимптотические свойства трансцендент уравнений четвертого порядка 264
5.6 Семейства уравнений с решениями в виде трансцендент 266
5.7 Пары Лакса для уравнений четвертого порядка 271
5.8 Обобщения уравнений Пенлеве 277
5.9 Преобразования Бэклунда для высших аналогов уравнений Пенлеве 284
5.10 Рациональные и специальные решения высших аналогов уравнений Пенлеве 291
5.11 Дискретные уравнения, соответствующие высшим аналогам уравнений Пенлеве 295
5.12 Задачи и упражнения к главе 5 304
ГЛАВА 6. МЕТОД ОБРАТНОЙ ЗАДАЧИ И МЕТОД ХИРОТЫ ДЛЯ РЕШЕНИЯ УРАВНЕНИЯ КОРТЕВЕГА — ДЕ ВРИЗА 306
6.1 Задача Коши для уравнения Кортевега — де Вриза 306
6.2 Прямая задача рассеяния 307
6.3 Интегральный вид стационарного уравнения Шредингера 313
6.4 Аналитические свойства амплитуды рассеяния 315
6.5 Уравнение Гельфанда — Левитана — Марченко 318
6.6 Интегрирование методом обратной задачи рассеяния уравнения Кортевега — де Вриза 321
6.7 Решение уравнения Кортевега — де Вриза в случае безотражательных потенциалов 323
6.8 Оператор Хироты и его свойства 326
6.9 Нахождение солитонных решений уравнения Кортевега — де Вриза методом Хироты 327
6.10 Метод Хироты для модифицированного уравнения Кортевега — де Вриза 331
6.11 Задачи и упражнения к главе 6 333
Литература 337
Предметный указатель.
Бесплатно скачать электронную книгу в удобном формате, смотреть и читать:
Скачать книгу Аналитическая теория нелинейных дифференциальных уравнений, Кудряшов Н.А., 2004 — fileskachat.com, быстрое и бесплатное скачивание.
Скачать djvu
Ниже можно купить эту книгу по лучшей цене со скидкой с доставкой по всей России. Купить эту книгу
http://habr.com/ru/post/418139/
http://obuchalka.org/2013070172229/analiticheskaya-teoriya-nelineinih-differencialnih-uravnenii-kudryashov-n-a-2004.html