Математическое описание.
Этапы составления математического описания. Наиболее общим приемом разработки математического описания является блочный принцип составления математического описания. Согласно этому принципу составление математического описания базируется на результатах системного анализа объекта моделирования, выделение отдельных подсистем, или блоков модели и их описанию. Общее описание объекта выполняется путем объединения описания отдельных блоков на основе структурного анализа с учетом взаимосвязей между отдельными блоками.
Состав математического описания. В составе математического описания, разработанного на основе физико-химической природы протекающих в системе процессов, можно выделить следующие группы уравнений:
1. Уравнения баланса масс и энергии, записанные с учетом выбранной структуры потоков веществ и количества взаимодействующих фаз.
2. Уравнения «элементарных» процессов для локальных элементов потоков. К ним относятся описания процессов массо- и теплообмена, скоростей химических реакций, фазовых переходов и т.д.
3. Теоретические, полуэмпирические или эмпирические соотношения между параметрами процесса. Например, зависимость коэффициента теплопередачи от скоростей потоков и их состава, зависимость теплоемкости от состава и т.д.
Ограничения на параметры процесса. При моделировании некоторых процессов необходимо учитывать ограничения на диапазон изменения некоторых параметров. Например, температура процесса не должна превышать допустимую температуру, при которой материал сохраняет прочность, давление в аппарате не должно превышать допустимого, скорости потоков не должны превышать возможности насосного оборудования и т.д.
Общим требованием для всех моделей является то, что число уравнений и различных соотношений, включенных в математическое описание, должно быть равно числу внутренних, т.е. зависящих от режима моделируемого объекта параметров, находимых в результате моделирования.
Типы уравнений. Для математического описания различных свойств моделируемых объектов обычно применяют следующие типы уравнений:
· Конечные алгебраические или трансцендентные уравнения – для описания стационарных режимов работы объектов с сосредоточенными параметрами.
· Обыкновенные дифференциальные уравнения – для описания стационарных режимов работы объектов с распределенными параметрами или для описания нестационарных режимов работы объектов с сосредоточенными параметрами.
· . Дифференциальные уравнения в частных производных – для описания динамики объектов с распределенными параметрами или для описания стационарных режимов работы объектов, с несколькими пространственными координатами.
Иногда, для описания динамики объектов с распределенными параметрами рассматривают времена релаксации отдельных параметров. Тогда выделив параметры, для которых времена релаксации очень малы, можно для них приравнять частные производные по времени нулю. В этом случае можно получить так называемые квазинестационарные модели. Для описания динамики таких объектов можно использовать более простые уравнения.
Дата добавления: 2015-08-14 ; просмотров: 4303 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
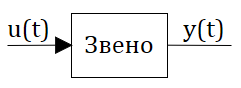
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


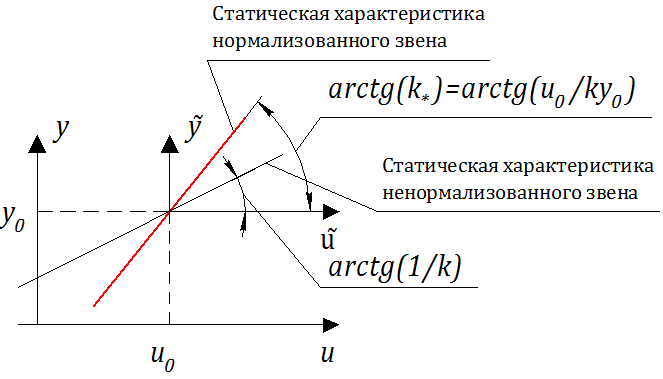
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
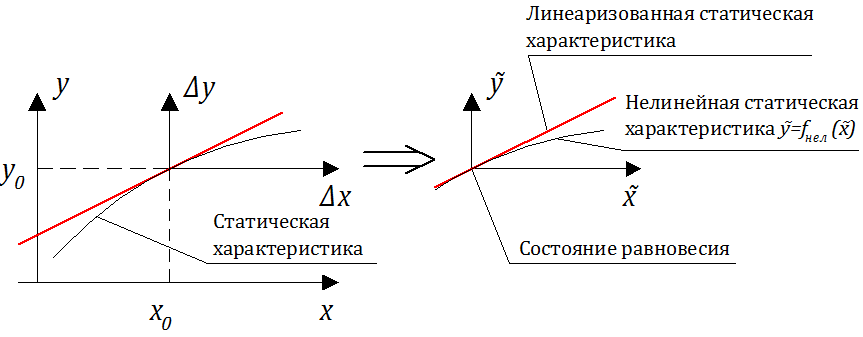
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
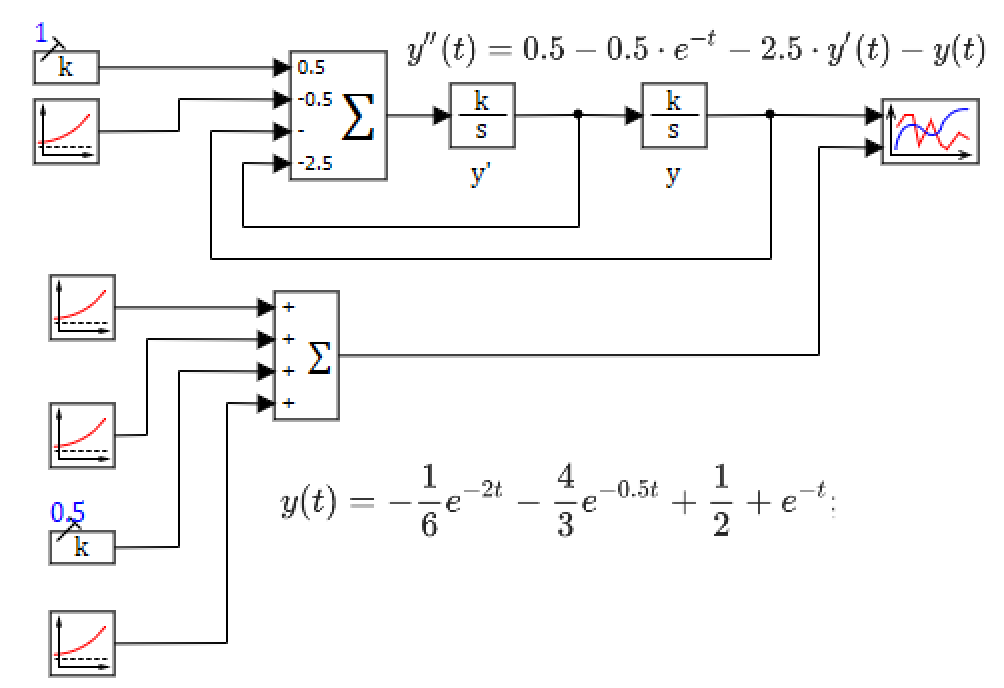
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
Анализ системы уравнений математического описания
Рассмотренные на предыдущей лекции примеры свидетельствуют о том, что абстрактная характеристика данной системы может быть получена с помощью полезных типов математического описания. Однако при этом естественно возникает вопрос: а для чего вообще нужно какое-либо математическое описание? Ответ на этот вопрос в значительной степени связан с нетривиальностью современных научных результатов и необходимостью уметь выделять существенные свойства описательных моделей. Кроме того, использование именно математического описания обусловлено следующими важными соображениями:
- Компактность. Словесное (или вербальное) описание системы (или процесса), как правило представляет собой нагромождение нечетких высказываний, которые лишь затуманивают существо дела. Избавиться от таких нечетких и не до конца продуманных соображений помогает компактная математическая символика. Математическое описание дает нам аналог знакомой картины и оказывается информативнее любого словесного описания.
- Ясность. Использование математического описания позволяет каждому аспекту изучаемого процесса поставить в соответствие определенный математический символ, в результате чего становится нагляднее взаимосвязь, существующая между различными параметрами процесса. Более того, подобное сопоставление позволяет гораздо проще, чем словесное описание, установить, не были ли упущены какие-либо существенные переменные, или, напротив, не были ли внесены какие-либо дополнительные несущественные сложности при построении описания.
Возможность численного анализа. Как только сделан выбор какого-либо математического описания, последнее «начинает жить» собственной жизнью, более или менее независимой от самого исследуемого процесса.
Другими словами, математическим описанием можно манипулировать в соответствии с обычными законами логики в надежде получить нетривиальное представление о самой системе. Кроме того, математическая модель дает основу для численного анализа, с помощью которого могут быть получены данные не только описательного, но и прогностического характера. Рассмотрим кратко некоторые типы математического описания, которые чаще других используются в математических конструкциях больших систем.
Внутреннее описание
Со времен Ньютона динамические процессы описывали на языке дифференциальных (или разностных) уравнений, т.е. в терминах некоторых естественно выбранных переменных, таких как положение, температура, скорость и т.д. В общем виде такое описание может быть представлено как:
dz/dt = f[z(t), x(t), t], z(0) = z0, y(t) = h[z(t), x(t), t],
где z(t) — n-мерный вектор, компоненты которого описывают состояние системы в момент времени t; y(t) — p-мерный вектор наблюдаемых выходов системы; x(t) — m-мерный вектор входов системы, z0 — начальное состояние системы.
В дискретном времени динамика системы может быть описана с помощью разностных соотношений z(k+1) = F[z(k), x(k), k], z(0) = z0, y(k) = H[z(k), x(k), k].
Наиболее важным свойством такого описания является то, что оно дает нам представление о поведении системы в некоторой локальной окрестности текущего состояния. При этом неявно предполагается, что локальная информация может быть каким-то образом «собрана воедино», что позволит понять глобальное (во времени или пространстве) поведение системы. Такой подход оказался достаточно обоснованным для анализа многих физических и технических задач. Простые примеры локального описания можно найти в элементарной физике. Известно, например, что колебательное движение груза (маятника) единичной массы, подвешенного на нерастяжимой и невесомой нити единичной длины, описывается уравнением (4.1):
d 2 z/dt 2 + a⋅dz/dt + sin(z) = x(t)
где а — коэффициент трения, x(t) — внешня сила, действующая на груз, z(t) — отклонение груза от положения равновесия.
Таким образом, уравнение (4.1) описывает мгновенное изменение положения и скорости маятника как функцию его текущего состояния (положения) и скорости, т.е. мы имеем локальное описание в координатах «положение-скорость», что характерно для всех описаний динамических процессов на языке дифференциальных или разностных уравнений.
Интересно отметить, что математические описания такого типа начали использовать только со времен Ньютона. До этого при описания физических процессов придерживались точки зрения, высказанной Аристотелем, согласно которой важность целого превыше важности его составляющих. Другими словами, значимость элементов, составляющих некоторое множество, трактовалась через значимость самого множества как целого. Однако возможность использования такого подхода в случае менее изученных объектов, в особенности систем социально-экономической природы, вовсе не очевидна.
Взгляды Аристотеля господствовали в физике на протяжении многих столетий, пока Галилей не высказал иную точку зрения, которая впоследствии была обоснована Ньютоном: целое объясняется свойствами его элементарных (локальных) составляющих, так называемый холистский подход. Сложность современной жизни, проявляющаяся в политике, экономике, социологии стимулирует возрождение интереса к холистским теориям.
Внешнее описание
Тип математического описания, с которым чаще всего приходится иметь дело ученому-экспериментатору, — это связь «вход-выход». Во многих отношениях такое описание диаметрально противоположно частному, локальному описанию, поскольку оно не содержит деталей и единственным доступным источником информации является закономерность (отображение), связывающая выходы системы с ее входами. При этом ничего не известно о внутреннем механизме преобразования входов в выходы. По этой причине связь вход-выход часто называют «внешним описанием» системы в отличие от «внутреннего» (или локального) описания (см. рис.4.1).
Внутреннее и внешнее описания позволяют рассматривать систему как устройство, образующее входы и выходы в соответствии с правилами, определенными внутренним описанием. Иными словами, система является информационным процессом в некотором обобщенном смысле.
Рис.4.1 — Внешнее и внутреннее описание системы
Очевидно, что внутреннее описание говорит нам гораздо больше о способе действия системы, поскольку каждое такое описание порождает внешнее описание. Тем не менее построение модели системы часто связано с решением диаметрально противоположного вопроса: может ли внутренняя модель «объяснить» каждое внешнее описание? Ответом на этот вопрос по существу является решение так называемой «задачи реализации», которая представляет собой один из важнейших аспектов теории систем.
Наиболее «сырая» возможная ситуация, при которой возникает необходимость в описании типа «вход-выход», имеет место, когда мы располагаем всего лишь таблицей элементов (часто чисел), характеризующих реакцию (выходы) системы на различные внешние воздействия (входы). В этом случае внешнее описание системы эквивалентно отображению:
где через X обозначено множество возможных входов, а через Y множество возможных выходов системы. Как отмечалось во многих задачах (в частности, психологии, экономики и общественных наук) множества X и Y представляют собой конечный набор элементов, связь между которыми описывается с помощью функции f.
Пример
Предположим, что эксперт, изучающий «черный» ящик не имеет ни малейшего представления ни о его природе, ни о его содержимом. Вместе с тем эксперт может производить над ним некоторые действия (входы) и наблюдать их результаты (выходы). Предположим для определенности, что
элементами множества X и множества Y являются показания различных измерительных приборов. Тогда описание эксперимента типа «вход-выход» могло бы быть таким:
| Время | Вход | Выход |
|---|---|---|
| 10:05 | Эксперт не производит никаких действий | Прибор издает звуковой сигнал частотой 240 Гц |
| 10:06 | Эксперт нажал на кнопку «A» | Частота сигнала возросла до 480 Гц |
| 10:07 | Эксперт случайно нажал на кнопку «B» | Ящик нагрелся на 20°C и начал вибрировать |
Этот довольно тривиальный пример показывает, что входы и выходы системы являются функциями времени, т.е. нельзя один и тот же эксперимент провести дважды! Единственное, что можно сделать, — это провести следующий эксперимент, который хотя и незначительно, но будет отличаться от предыдущего.
Менее тривиальный пример внешнего описания системы дает «бихевиористская» школа психологов, для которой характерным является проведение эксперимента и запись его результатов в формате «воздействие-реакция». По мнению представителей этой школы, такое внешнее описание системы дает максимум информации, которую вообще можно получить о ее структуре и функционировании. В то же время «познавательная» школа придерживается другой точки зрения, утверждая, что единственным удовлетворительным описанием системы может быть только внутренняя модель.
Основываясь на довольно общих результатах теории систем, можно показать, что это спор ни о чем. Обе школы, в сущности, утверждают одно и то же, и с точки зрения теории систем эти дебаты столь же содержательны, как и дискуссии относительно того, какая сторона монеты наиболее полно отражает ее стоимость.
Описание систем с конечным числом состояний
В тех случаях, когда предположение конечномерности пространства состояний заменяется предположением о конечности числа его элементов, мы имеем дело с классом систем, анализ которых возможен с помощью чисто алгебраических методов. Важность такой замены трудно переоценить, поскольку совокупность систем с конечным числом состояний включает все последовательные цифровые вычислительные машины.
Математическое описание системы с конечным числом состояний включает:
- множество допустимых входов — X,
- множество допустимых выходов — Y,
- множество состояний — Z,
- функцию перехода — : Z X Z,
- функцию выхода — : Z X Y,
При этом предполагается, что множества X, Y и Z конечны. Это позволяет представить описание системы в виде:
В литературе такое представление часто называют схематическим.
Как отмечалось, ограничения вычислительного характера с неизбежностью вынуждают нас явно или неявно сводить каждую системную задачу к виду, указанному выше. Поэтому необходимы тщательное изучение и понимание алгебраической структуры подобных «конечных» описаний, которая основывается на теории конечных полугрупп. Рассмотрение этой теории выходит за рамки настоящего курса лекций.
Пример
Пусть система состоит из симметрий вращения правильного треугольника. Тогда некоторые возможные конечные пространства состояний могут иметь вид:
Рис.4.2 — Конечные пространства
Для описания системы достаточно любого из этих пространств состояний, однако только некоторые из них удобнее использовать для вычислений результата воздействия на состояние системы. Следовательно, пространство состояний вовсе не обязательно должно быть непосредственно привязано к реальному физическому процессу. Это чисто математическая условность, введенная для упрощения проблемы определения реакции системы на заданные внешние воздействия.
Пусть имеются два возможных отображения σ1 и σ2, переводящие одно состояние системы в другое и соответствующие повороту треугольника вокруг центра тяжести на 120 и 240 градусов соответственно. Результаты применения этих отображений к различным пространствам состояний можно представить в виде таблицы:
| zi | σ1(zi) | σ2(zi) | |
|---|---|---|---|
| z1 → | [a, b, c] [c, a, b] [b, c, a] | [c, a, b] [b, c, a] [a, b, c] | [b, c, a] [a, b, c] [c, a, b] |
| z2 → | 0 2π/3 4π/3 | 2π/3 4π/3 0 | 4π/3 0 2π/3 |
| z3 → | 0 1 2 | 1 2 0 | 2 0 1 |
Пространство z1 на первый взгляд излишне сложное, оказывается вполне пригодным для более сложных систем, например в случае симметрий более общего вида, где могут присутствовать отображения типа σ. В то же время пространства z2 и z3 не допускают очевидных обобщений на более сложные случаи с сохранением простоты вычислений.
Способ выбора конкретного пространства состояний системы называется ее координатизацией. При этом важно установить, всегда ли существует координатизация, которую можно считать «хорошей» с точки зрения описания поведения системы. Ключевым моментом проблемы координатизации является алгебраическая структура модели системы в пространстве состояний.
http://habr.com/ru/post/506984/
http://victor-safronov.ru/systems-analysis/lectures/zhivickaya/06.html