VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Благодарю Ю.А.Смолькина за обнаружение 07.08.19 ошибки на настоящей странице и информирование о ней.
Линейное пространство
Определения
Пусть дано множество $ \mathbb V_<>=\left\ < X,Y,Z,U,\dots \right\>$ элементов произвольной природы. Пусть для элементов этого множества определены две операции: сложения $ X+Y_<> $ и умножения на любое вещественное число $ \alpha_<> $: $ \alpha \cdot X_<> $, и множество $ \mathbb V_<> $ замкнуто относительно этих операций: $ X+Y \in \mathbb V ,\ \alpha \cdot X \in \mathbb V_<> $. Пусть эти операции подчиняются аксиомам:
1. $ X+Y=Y+X_<> $ для $ \ < X,\, Y\>\subset \mathbb V_<> $;
2. $ (X+Y)+Z_<>=X+(Y+Z) $ для $ \ < X,\, Y,\, Z \>\subset \mathbb V_<> $;
3. в $ \mathbb V_<> $ cуществует нулевой вектор $ \mathbb O_<> $ со свойством $ X+ \mathbb O =X_<> $ для $ \forall X\in \mathbb V_<> $;
4. для каждого $ X\in \mathbb V_<> $ существует обратный вектор $ X^<\prime>\in \mathbb V_<> $ со свойством $ X+X^<\prime>=\mathbb O_<> $;
5. $ 1\cdot X=X_<> $ для $ \forall X\in \mathbb V_<> $;
6. $ \lambda \left(\mu X \right)_<>= \left(\lambda \mu \right)X $ для $ \forall X\in \mathbb V_<> $, $ \ <\lambda ,\, \mu \>\subset \mathbb R_<> $ ;
7. $ (\lambda + \mu)X=\lambda X + \mu X_<> $ для $ \forall X\in \mathbb V_<> $, $ \<\lambda ,\, \mu \>\subset \mathbb R_<> $ ;
8. $ \lambda (X + Y) =\lambda X_<> + \lambda Y $ для $ \ < X,\, Y\>\subset \mathbb V_<> , \lambda \in \mathbb R $.
Тогда такое множество $ \mathbb V_<> $ называется линейным (векторным) пространством, его элементы называются векторами, и — чтобы подчеркнуть их отличие от чисел из $ \mathbb R_<> $ — последние называются скалярами 1) . Пространство, состоящее из одного только нулевого вектора, называется тривиальным .
Элементарно доказывается единственность нулевого вектора, и единственность вектора, обратного вектору $ X\in \mathbb V_<> $: $ X^<\prime>=-1\cdot X_<> $, его привычно обозначают $ — X_<> $.
Подмножество $ \mathbb V_ <1>$ линейного пространства $ \mathbb V_<> $, само являющееся линейным пространством (т.е. $ \mathbb V_ <1>$ замкнуто относительно сложения векторов и умножения на произвольный скаляр), называется линейным подпространством пространства $ \mathbb V_<> $. Тривиальными подпространствами линейного пространства $ \mathbb V_<> $ называются само $ \mathbb V_<> $ и пространство, состоящее из одного нулевого вектора $ \mathbb O_<> $.
Примеры линейных пространств
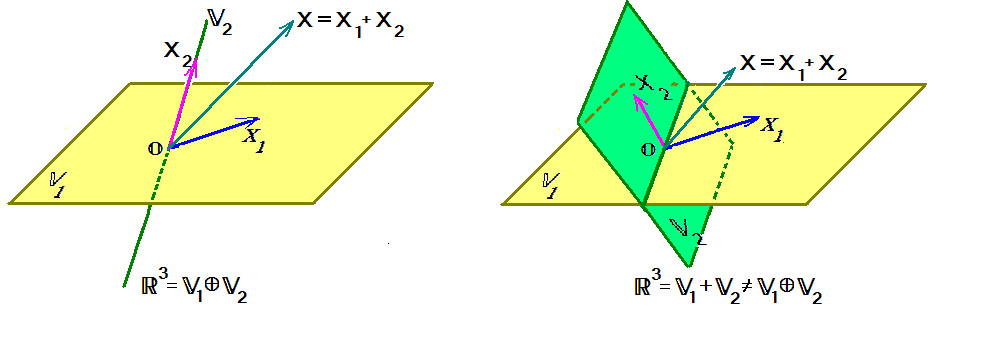
Пример 1. Пространство $ \mathbb R^ <3>$ упорядоченных троек вещественных чисел $ (a_1,a_2,a_<3>) $ с операциями, определяемыми равенствами:
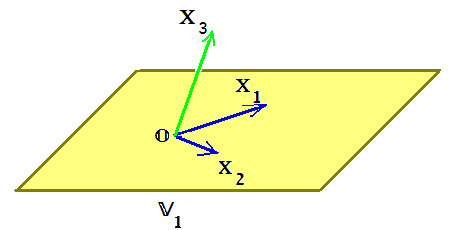
$$ (a_1,a_2,a_3)+(b_1,b_2,b_3)= (a_1+b_1,a_2+b_2,a_3+b_3),\ \alpha (a_1,a_2,a_3) = ( \alpha a_1, \alpha a_2, \alpha a_3 ) \ . $$ Геометрическая интерпретация очевидна: вектор в пространстве, «привязанный» к началу координат, может быть задан координатами своего конца $ (a_1,a_2,a_<3>) $. На рисунке показано и типичное подпространство пространства $ \mathbb R^ <3>$: плоскость, проходящая через начало координат. 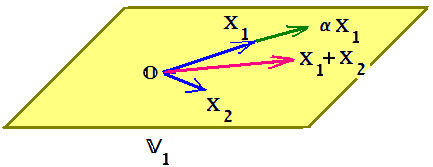 Точнее говоря, элементами $ \mathbb V_1 $ являются векторы, имеющие начало в начале координат и концы — в точках плоскости. Замкнутость такого множества относительно сложения векторов и их растяжения 2) очевидна.
Точнее говоря, элементами $ \mathbb V_1 $ являются векторы, имеющие начало в начале координат и концы — в точках плоскости. Замкнутость такого множества относительно сложения векторов и их растяжения 2) очевидна.
Пример 2. Основываясь на том же примере, можно дать и иную интерпретацию векторного пространства $ \mathbb V_1 $ (заложенную, кстати, уже в самом происхождении слова «вектор» 3) ) — оно определяет набор «сдвигов» точек пространства $ \mathbb R^ <3>$. Эти сдвиги — или параллельные переносы любой пространственной фигуры — выбираются параллельными плоскости $ \mathbb V_1 $.
Пример 3. Естественным обобщением $ \mathbb R^ <3>$ служит пространство $ \mathbb R_<>^
$$ \left\<\begin
Почему множество решений системы неоднородных уравнений не образует линейного подпространства?
Пример 4. Обобщая далее, можем рассмотреть пространство «бесконечных» строк или последовательностей $ (a_1,\dots,a_n, \dots ) $, обычно являющееся объектом математического анализа — при рассмотрении последовательностей и рядов. Подпространство этого пространства образуют, например, линейные рекуррентные последовательности $ \
Можно рассматривать строки (последовательности) «бесконечные в обе стороны» $ \< \dots,a_<-2>,a_<-1>,a_0,a_1,a_2,\dots \> $ — они используются в ТЕОРИИ СИГНАЛОВ.
Пример 5. Множество $ m\times n_<> $-матриц с вещественными элементами с операциями сложения матриц и умножения на вещественные числа образует линейное пространство. Будем обозначать это пространство $ \mathbb R^
В пространстве квадратных матриц фиксированного порядка каждое из следующих подмножеств составляет линейное подпространство: симметричных, кососимметричных, верхнетреугольных, нижнетреугольных и диагональных матриц.
Пример 6. Множество полиномов одной переменной $ x_<> $ степени в точности равной $ n_<> $ с коэффициентами из $ \mathbb A_<> $ (где $ \mathbb A_<> $ — любое из множеств $ \mathbb Z, \mathbb Q, \mathbb R_<> $ или $ \mathbb C_<> $) с обычными операциями сложения полиномов и умножения на число из $ \mathbb A_<> $ не образует линейного пространства. Почему? — Потому что оно не является замкнутым относительно сложения: сумма полиномов $ f(x)=x^n -x+1 $ и $ g(x)=-x^n+x^
Пример 7. Обобщением предыдущего случая будет пространство полиномов нескольких переменных $ x_1,\dots, x_ <\ell>$ степени не выше $ n_<> $ с коэффициентами из $ \mathbb A_<> $. Например, множество линейных полиномов $$ \left\< a_1x_1+\dots+a_<\ell>x_<\ell>+b \big| (a_1,\dots,a_<\ell>,b) \in \mathbb A^ <\ell+1>\right\> $$ образует линейное пространство. Множество однородных полиномов (форм) степени $ n_<> $ (с присоединением к этому множеству тождественно нулевого полинома) — также линейное пространство.
Изоморфизм
Пусть имеются два линейных пространства разной природы: $ \mathbb V_<> $ с операцией $ +_<> $ и $ \mathbb W_<> $ с операцией $ \boxplus_<> $. Может оказаться так, что эти пространства «очень похожи», и свойства одного получаются простым «переводом» свойств другого.
Говорят, что пространства $ \mathbb V_<> $ и $ \mathbb W_<> $ изоморфны если между множествами их элементов можно установить такое взаимно-однозначное соответствие, что если $ X_<> \leftrightarrow X^ <\prime>$ и $ Y_<> \leftrightarrow Y^ <\prime>$ то $ X+Y \leftrightarrow X_<>^ <\prime>\boxplus Y^ <\prime>$ и $ \lambda X_<> \leftrightarrow \lambda X^ <\prime>$.
При изоморфизме пространств $ \mathbb V_<> $ и $ \mathbb W_<> $ нулевому вектору одного пространства будет соответствовать нулевой вектор другого пространства.
Пример. Пространство $ \mathbb R^
Пример. Пространство $ \mathbb R^
Пример. Пространство квадратичных форм от $ n_<> $ переменных изоморфно пространству симметричных матриц $ n_<> $-го порядка. Изоморфизм устанавливается соответствием, которое мы проиллюстрируем для случая $ n=3_<> $:
$$ a_<11>x_1^2+a_<12>x_1x_2+a_<13>x_1x_3+a_<22>x_2^2+a_<23>x_2x_3+a_<33>x_3^2 \leftrightarrow \left( \begin
Линейная зависимость, базис, координаты
Линейной комбинацией системы векторов $ \
Множество всевозможных линейных комбинаций системы векторов $ \
Теорема 1. Линейная оболочка векторов $ X_1,\dots,X_
Пример. В пространстве $ \mathbb P_
Система векторов $ \< X_<1>,\dots,X_m \> $ называется линейно зависимой (л.з.) если существуют числа $ \alpha_<1>,\dots,\alpha_m $, такие что хотя бы одно из них отлично от нуля и $$ \alpha_1X_1+\dots+\alpha_mX_m=\mathbb O $$ Если же это равенство возможно только при $ \alpha_<1>=0,\dots,\alpha_m=0 $, то система векторов называется линейно независимой (л.н.з.).
Пример. Для полиномов нескольких переменных свойство линейной зависимости является частным проявлением более общего свойства функциональной зависимости. Так, однородные полиномы (формы)
$$ f_1=(x_1+x_2+x_3)^2,\quad f_2=x_1x_2+x_1x_3+x_2x_3,\quad f_3=x_1^2+x_2^2+x_3^2 $$ являются линейно зависимыми, поскольку $$ f_1-2\,f_2-f_3 \equiv 0 \ . $$ Полиномы $$ \tilde f_1=x_1+x_2+x_3,\quad f_2=x_1x_2+x_1x_3+x_2x_3,\quad f_3=x_1^2+x_2^2+x_3^2 $$ не являются линейно зависимыми, но являются функционально зависимыми, поскольку $$ \tilde f_1^2-2\,f_2-f_3 \equiv 0 \ . $$ ♦
Теорема 2. а) Если система содержит хотя бы один нулевой вектор, то она л.з.
б) Если система л.н.з., то и любая ее подсистема л.н.з.
в) При $ m>1 $ система $ \
Теорема 3. Если каждый из векторов системы $ \ < X_1,\dots,X_
Две системы векторов называются эквивалентными если каждый вектор одной системы линейно выражается через векторы другой и обратно.
Теорема 4. Системы векторов
$$ \ < X_1,\dots,X_
Теорема 5. Если каждая из двух эквивалентных систем
$$ \ < X_1,\dots,X_
Линейно независимая система векторов $ \
При этом не подразумевается конечность системы, т.е. суммирование может распространяться на бесконечное число слагаемых. Так, например, пространство бесконечных строк (или последовательностей) $ \left[a_<1>,a_2,\dots\, \right] $ имеет бесконечный базис, состоящий из векторов $$ [\underbrace<0,\dots,0,1>_j,0,\dots \, ] \quad npu \ j \in \mathbb N \ . $$
В случае, когда базис пространства $ \mathbb V_<> $ конечен, пространство $ \mathbb V_<> $ называется конечномерным, а число векторов базиса тогда называется размерностью пространства $ \mathbb V_<> $ и обозначается 5) : $ \dim \mathbb V_<> $. Также полагают, что размерность тривиального пространства, состоящего из одного только нулевого вектора, равна нулю: $ \dim \ <\mathbb O_<>\>= 0 $.
Пример. Линейное пространство $ m\times n_<> $ матриц имеет размерность $ mn_<> $. Так, для случая $ m_<>=3 ,n=2 $ в качестве базиса можно выбрать следующий набор матриц
$$ \left( \begin
Найти размерности подпространства симметричных и подпространства кососимметричных матриц порядка $ n_<> $.
Пример [1]. Замечательный пример трехмерного линейного пространства дает нам совокупность всех цветов. Под суммой двух цветов будем понимать цвет, образованный их смешением
под умножением цвета на положительное число $ k_<> $ — увеличение в $ k_<> $ раз яркости цвета
Анимация ☞ ЗДЕСЬ (1500 K, gif)
под умножением на $ (-1) $ — взятие дополнительного цвета. При этом оказывается, что совокупность всех цветов выражается линейно через три цвета: красный, зеленый и синий, т.е. образует трехмерное линейное пространство. (Точнее, некоторое тело в трехмерном пространстве, поскольку яркости цветов ограничены верхним порогом раздражения.) Исследование этого трехмерного тела всех цветов является важным орудием цветоведения. ♦
Если $ \dim \mathbb V=d_<> $ и вектора $ X_1,\dots,X_
Теорема 6. Если $ \dim \mathbb V=d>0 $, то любая система из $ d_<> $ линейно независимых векторов пространства образует базис этого пространства.
Доказательство. Пусть $ \
Теорема 7. Любой вектор $ X \in \mathbb V_<> $ может быть разложен по фиксированному базису пространства единственным образом.
Очевидно, $ \dim \mathbb R^
Имеются два способа задания линейных подпространств в $ \mathbb R^
Пример. Найти базис подпространства
Решение. Ищем $$ \operatorname
Ответ. Базис составляют, например, первая, вторая и четвертая строки.
Другим способом задания линейного подпространства в $ \mathbb R^
Теорема 8. Множество решений системы однородных уравнений $ AX=\mathbb O_<> $ образует линейное подпространство пространства $ \mathbb R^
Пример. В пространстве $ \mathbb P_
$$ f(x)=a_0+a_1x+a_2x^2+\dots+a_nx^n $$ будут его коэффициенты. Можно выбрать и другой базис, например, $ \ <1, x-c,(x-c)^2,\dots,(x-c)^n \>$ при произвольном числе $ c_<> $. Координатами полинома в этом базисе будут теперь коэффициенты формулы Тейлора: $$ f(x) \equiv f(c)+ \frac
Найти координаты полинома
Теорема 9. Любое векторное пространство $ \mathbb V_<> $ размерности $ d_<> $ изоморфно $ \mathbb R^
Доказательство. Изоморфизм можно установить следующим соответствием. Если $ \
Критерии линейной зависимости
Теорема . Строки
$$ \<(a_<11>,\dots,a_<1n>),\dots, (a_
Теорема . Строки
$$ \<(a_<11>,\dots,a_<1n>),\dots, (a_
$$ \<(a_<11>,\dots,a_<1n>),\dots, (a_
Теорема . Аналитические на интервале $ ]a,b[ $ функции $ u_1(x),\dots,u_n(x) $ линейно зависимы на $ ]a,b[ $ тогда и только тогда, когда их вронскиан
Относительный базис
В настоящем пункте $ \mathbb V_1 $ обозначает линейное подпространство пространства $ \mathbb V_<> $, отличное от тривиального; обозначаем $ d_1=\dim \mathbb V_1 $.
Теорема. Произвольный базис подпространства $ \mathbb V_1 $ можно дополнить до базиса пространства $ \mathbb V_<> $.
Доказательство. Пусть $ \
Говорят, что система векторов $ \
Теорема. Обозначим $ \
Пример. Найти все значения параметра $ <\color
Решение. Базисом подпространства $ \mathbb V_1 $ является произвольная ФСР заданной системы однородных уравнений, например $ \
Ответ. $ <\color
Говорят, что система векторов $ \
Теорема. Обозначим $ \ < Y_1,\dots,Y_
Доказательство. Действительно, любой вектор $ X\in \mathbb V_<> $ выражается через векторы $ X_1,\dots,X_k,Y_1,\dots,Y_
Базис $ \mathbb V_<> $ строится дополнением базиса $ \mathbb V_1 $ векторами $ X_1,\dots,X_k $ линейно независимыми относительно $ \mathbb V_1 $. Поэтому $$<.>_<> \mbox <число векторов относительного базиса >\ = \dim \mathbb V — \dim \mathbb V_1 \ .$$
Это число называется коразмерностью 6) подпространства $ \mathbb V_1 $ в пространстве $ \mathbb V $.
Сумма и пересечение линейных подпространств
Пусть $ \mathbb V_1 $ и $ \mathbb V_2 $ — подпространства линейного пространства $ \mathbb V_<> $. Множество $$ \mathbb V_1+ \mathbb V_2 = \left\
Понятие пересечения линейных подпространств совпадает с понятием пересечения их как множеств.
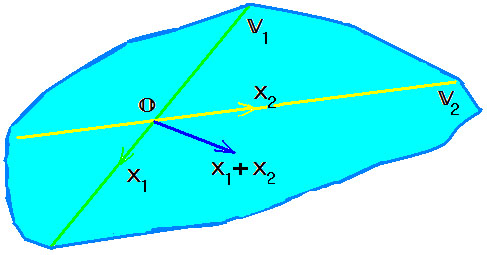
Теорема. $ \mathbb V_1+ \mathbb V_2 $ и $ \mathbb V_1 \cap \mathbb V_2 $ являются подпространствами линейного пространства $ \mathbb V_<> $.
Докажите, что $ \mathbb V_1+ \mathbb V_2 $ — это подпространство минимальной размерности, содержащее как $ \mathbb V_1 $, так и $ \mathbb V_2 $.
Теорема. Имеет место формула:
$$ \dim \, \mathbb V_1 + \dim \, \mathbb V_2=\dim \, (\mathbb V_1 \cap \mathbb V_2) + \dim \, (\mathbb V_1 + \mathbb V_2) \ . $$
Доказательство ☞ ЗДЕСЬ.
Можно ли обобщить этот результат на случай трех (и более подпространств)? Cправедлив ли, к примеру, аналог формулы включений-исключений в следующем виде:
$$\dim \, \mathbb V_1 + \dim \, \mathbb V_2 + \dim \, \mathbb V_3 — $$ $$ -\left\ <\dim \, (\mathbb V_1 \cap \mathbb V_2) + \dim \, (\mathbb V_1 \cap \mathbb V_3) + \dim \, (\mathbb V_2 \cap \mathbb V_3) \right\>+ $$ $$+ \dim \, (\mathbb V_1 \cap \mathbb V_2 \cap \mathbb V_3) =\dim \, (\mathbb V_1 + \mathbb V_2 + \mathbb V_3) \ ?$$
Теорема. Имеет место формула:
Пример. Найти базис суммы и размерность пересечения
$$\mathbb V_1=<\mathcal L>\left( \left[ \begin
Решение. Действуя согласно предыдущей теореме, составляем матрицу из всех векторов $$ \left( \begin
Ответ. Базис $ \mathbb V_1 + \mathbb V_2 $ составляют векторы $ X_1,X_2,X_3 $; $ \dim \, (\mathbb V_1 \cap \mathbb V_2) = 3+2 — 3 =2 $.
Алгоритм нахождения базиса $ <\mathcal L>(X_1,\dots,X_m) \cap <\mathcal L>(Y_1,\dots,Y_<\ell>) $ проиллюстрируем на примере.
Пример. Найти базис $ \mathbb V_1 \cap \mathbb V_2 $ при
$$ \begin
Решение. 1. Сначала найдем базисы каждого из подпространств: $$\dim \mathbb V_1=2, \ \mathbb V_1=\mathcal L(X_1, X_2) \ ; \ \dim \mathbb V_2=3,\ \mathbb V_2=\mathcal L(Y_1, Y_2, Y_3) \ . $$
2. Произвольный вектор $ Z\in \mathbb R^5 $, принадлежащий $ \mathbb V_1 \cap \mathbb V_2 $, должен раскладываться по базису каждого из подпространств: $$Z=\alpha_1 X_1 + \alpha_2 X_2= \beta_1 Y_1 + \beta_2 Y_2 + \beta_3 Y_3 \ .$$ Для определения неизвестных значений координат составляем систему уравнений $$ \begin
3. Получившиеся значения координат позволяют выразить базис пересечения — либо через базис подпространства $ \mathbb V_1 $ (если использовать полученные значения для $ \alpha_1,\alpha_2 $), либо через базис подпространства $ \mathbb V_2 $ (если использовать $ \beta_1,\beta_2, \beta_3 $). Например, $$ Z_1=-1/3 X_1 + 1/3 X_2 = [0,1,0,1,0]^<^<\top>>,\ $$ $$ Z_2=1/3 X_1 + 2/3 X_2 = [1,1,1,1,1]^<^<\top>> \ . $$
Найти базисы суммы и пересечения подпространств
Решение ☞ ЗДЕСЬ.
Прямая сумма линейных подпространств
Пусть $ \mathbb V_1 $ и $ \mathbb V_2 $ — подпространства линейного пространства $ \mathbb V_<> $. Говорят, что $ \mathbb V_<> $ раскладывается в прямую сумму подпространств $ \mathbb V_1 $ и $ \mathbb V_2 $ если любой вектор $ X\in \mathbb V_<> $ может быть представлен в виде $ X=X_1+X_2 $, где $ X_1\in \mathbb V_1,X_2\in \mathbb V_2 $ и такое представление единственно. Этот факт записывают: $ \mathbb V= \mathbb V_1 \oplus \mathbb V_2 $. Вектор $ X_ <1>$ называется проекцией вектора $ X_<> $ на подпространство $ \mathbb V_1 $ параллельно подпространству $ \mathbb V_ <2>$.
Пример. Линейное пространство квадратных матриц порядка $ n_<> $ раскладывается в прямую сумму подпространств: подпространства симметричных матриц и подпространства кососимметричных матриц. В самом деле, для матрицы $ A_
$$A=\frac<1> <2>\left(A+A^ <^\top>\right) + \frac<1> <2>\left(A-A^ <^\top>\right) $$ и в правой части первая скобка дает симметричную матрицу, а вторая — кососимметричную. Покажите, что не существует иного разложения матрицы $ A_<> $ в сумму симметричной и кососимметричной.
Теорема. Пусть $ \mathbb V=\mathbb V_1 + \mathbb V_2 $. Эта сумма будет прямой тогда и только тогда, когда подпространства $ \mathbb V_1 $ и $ \mathbb V_2 $ имеют тривиальное пересечение:
$$\mathbb V_1 \cap \mathbb V_2=\ <\mathbb O \>\ .$$
Доказательство. Необходимость. Пусть сумма $ \mathbb V_1 + \mathbb V_2 $ — прямая, но существует вектор $ X\ne \mathbb O $, принадлежащий $ \mathbb V_1 \cap \mathbb V_2 $. Но тогда и вектор $ (-X) $ принадлежит $ \mathbb V_1 \cap \mathbb V_2 $. Для нулевого вектора $ \mathbb O $ получаем два представления в виде суммы проекций на подпространства: $$ \mathbb O = \mathbb O + \mathbb O = X+ (-X) \, . $$ Это противоречит понятию прямой суммы.
Достаточность. Если $ \mathbb V_1 \cap \mathbb V_2=\ <\mathbb O \>$, но существует вектор $ X \in \mathbb V_1 + \mathbb V_2 $, имеющий два различных разложения в сумму проекций $$ X=X_1+X_2 =Y_1+ Y_2 \quad npu \quad \
Сумма $ \mathbb V=\mathbb V_1 + \mathbb V_2 $ будет прямой тогда и только тогда, когда базис $ \mathbb V_<> $ может быть получен объединением базисов $ \mathbb V_
Пример [2]. Доказать, что сумма подпространств
$$\mathbb V_1=<\mathcal L>\left( \left[ \begin
Решение. Базисы $ \mathbb V_1 $ и $ \mathbb V_2 $ составляют соответственно системы $ \
Линейные многообразия
Пусть $ \mathbb V_1 $ — линейное подпространство пространства $ \mathbb V_<> $, а $ X_ <0>$ — произвольный фиксированный вектор из $ \mathbb V_<> $. Множество $$ \mathbb M = X_0+ \mathbb V_1 = \left\
$ \
а $ \mathfrak r= \operatorname
Получаем, следовательно, $ (n-<\mathfrak r>) $-мерную плоскость в $ \mathbb R^n $, a в случае $ (n-<\mathfrak r>)=1 $ — прямую $$\mathbb M=X_0+tX_1 \quad npu \ t \in \mathbb R \ ; $$ в последнем случае вектор $ X_ <1>$ называют направляющим вектором этой прямой.
Некоторые задачи на линейные многообразия ☞ ЗДЕСЬ.
Лекция № 5 (02.03.10)

Лекция № 5 (02.03.10)
5.4.2. Фундаментальная система решений
Определение. Фундаментальной системой решений (сокращённо ФСР) данной однородной линейной системы уравнений называется любой базис её подпространства решений.
5.4.3. Размерность подпространства решений
Лемма 1. При элементарных преобразованиях над строками матрицы линейно зависимые столбцы переходят в линейно зависимые.
Пусть A = (a1, a2, …, an) − векторная запись данной матрицы. После совершения нескольких элементарных преобразований матрицу А мы привели к матрице В. Пусть aj1, aj2, …, ajk − линейно зависимые столбцы данной матрицы, где 1 ≤ j1
Способы описания подпространств линейного пространства
Рассмотрим два важных способа описания линейных подпространств, которые условно будем называть внутренним и внешним. В первом (внутреннем) способе используется понятие линейной оболочки векторов, когда все элементы подпространства выражаются через некоторые его элементы (образующие). При втором (внешнем) способе применяются однородные системы уравнений. В этом случае подпространство описывается как пересечение некоторых содержащих его множеств. Для каждого способа описания подпространств укажем методики на хождения размерностей, базисов, алгебраических дополнений, пересечений и сумм подпространств.
Любое n-мерное вещественное линейное пространство изоморфно n-мерному арифметическому пространству . Чтобы установить изоморфизм , достаточно выбрать в пространстве базис и каждому вектору поставить в соответствие его координатный столбец. Поэтому в данном разделе будем рассматривать описание подпространств n-мерного арифметического пространства .
Первый (внутренний) способ. Пусть в пространстве заданы столбцы . Напомним, что для систем столбцов были определены понятия базы (максимальной линейно независимой подсистемы столбцов) и ранга (максимального числа линейно не зависимых столбцов системы), а также методы их нахождения.
Рассматривая линейную оболочку столбцов как линейное подпространство , заключаем, что база системы столбцов является базисом этого подпространства, а ранг системы столбцов равен размерности подпространства .
Поэтому для нахождения размерности и базиса подпространства нужно выполнить следующие действия:
1) составить из данных столбцов матрицу размеров ;
2) привести ее к ступенчатому виду (1.4), используя элементарные преобразования строк;
3) определить размерность и базис подпространства
– количество ненулевых строк в матрице равняется размерности подпространства, т.е. ,
– столбцы матрицы , содержащие единичные элементы (в начале каждой «ступеньки»), определяют номера линейно независимых столбцов матрицы , т.е. искомый базис.
Таким образом, если подпространство задано своими образующими , то его размерность равна рангу системы столбцов , т.е. , а базисом служит максимальная линейно независимая подсистема образующих.
Второй (внешний) способ. Пусть подпространство задано как множество решений однородной системы уравнений с неизвестными. Множество решений системы уравнений можно рассматривать как пересечение подпространств , где — множество решений i-го уравнения системы . Напомним, что любое решение однородной системы представляется в виде линейной комбинации элементов фундаментальной системы решений. Поэтому раз мерность пространства , а базисом служит фундаментальная система решений однородной системы . Способы нахождения фундаментальной системы решений рассмотрены ранее.
Переход от одного способа описания подпространств к другому
Переход от внутреннего описания к внешнему. Пусть подпространство задано линейной оболочкой столбцов . Требуется составить такую однородную систему уравнений, множество решений которой совпадает с , т.е. . Для этого нужно выполнить следующие действия.
1. Из данных столбцов составить матрицу размеров , а затем блочную матрицу , приписав к матрице единичную матрицу n-го порядка.
2. Элементарными преобразованиями над строками блочной матрицы и первыми ее столбцами привести матрицу к виду , где — простейший вид матрицы .
3. Из последних строк матрицы составить матрицу .
4. Записать искомую систему уравнений .
Поясним содержание алгоритма. Заданное подпространство состоит из линейных комбинаций данных векторов, т.е. все его элементы имеют вид . Решаемую задачу можно сформулировать так: для каких векторов найдутся такие числа , чтобы выполнялось равенство . Другими словами, при каких неоднородная система ( уравнений с неизвестными ) имеет решения? Используя необходимое и достаточное условие (5.24) совместности системы, получаем равенство . Заметим, что решение поставленной задачи неоднозначно, так как существует много однородных систем, имеющих од но и то же множество решений.
Пример 8.8. Подпространство задано линейной оболочкой столбцов . Составить систему уравнений, определяющую подпространство .
Решение. 1. Составляем матрицу и блочную матрицу:
2. Приводим левый блок к простейшему виду. Вычитаем первую строку из остальных, а затем к четвертой строке прибавляем вторую, умноженную на (-2):
Преобразовываем столбцы левого блока: ко второму столбцу прибавим пер вый, умноженный на (-1), к третьему столбцу прибавим первый, умноженный на (-3), а затем второй, умноженный на (-1). Эти преобразования не изменяют правый блок полученной матрицы. Находим простейший вид Л матрицы и матрицу
3. Из последних строк матрицы составляем матрицу искомой системы.
4. Записываем систему уравнений Заданные в условии примера столбцы являются решениями полученной системы, в чем можно убедиться при их подстановке в систему уравнений вместо .
Переход от внешнего описания к внутреннему. Пусть подпространство задано как множество решений однородной системы т уравнений с л неизвестными: . Требуется найти размерность и базис этого подпространства, т.е. представить его в виде линейной оболочки . Для этого нужно выполнить следующие действия.
1. Найти фундаментальную систему решений однородной системы . Искомая размерность .
2. Представить заданное пространство как линейную оболочку .
Первый пункт алгоритма удобно выполнять следующим образом:
– составить блочную матрицу , приписав к матрице единичную матрицу n-го порядка;
– элементарными преобразованиями над столбцами блочной матрицы и строками верхнего блока привести матрицу к виду , где — простейший вид матрицы ;
– из последних столбцов матрицы составить фундаментальную матрицу .
Столбцы фундаментальной матрицы составляют искомую фундаментальную систему решений.
Заметим, что решение поставленной задачи неоднозначно, так как существует много базисов одного и того же линейного подпространства.
Пример 8.9. Найти размерность и базис подпространства , заданного системой уравнений
Решение. 1. Фундаментальная матрица для этой системы была найдена в примере 5.6
Ее столбцы образуют фундаментальную систему решений. Размерность подпространства равна , .
2. Столбцы являются искомым базисом, так как они линейно независимы и .
http://pandia.ru/text/78/375/777.php
http://mathhelpplanet.com/static.php?p=sposoby-opisaniya-podprostranstv