Основные блок-схемы решения линейных и квадратичных задач с параметрами
Разделы: Математика
Задачи с параметрами (ЗсП) традиционно являются наиболее сложными для учащихся, поскольку требуют от них умения логически рассуждать и проводить анализ решения. Подобные задачи являются первыми исследовательскими задачами, с которыми встречаются школьники. Для их решения не требуются знания, выходящие за пределы школьной программы, но недостаточно применения лишь стандартных приемов, а необходимо глубокое понимание всех разделов элементарной математики.
В данной статье предпринята попытка систематизации и формализации (в форме блок-схем) наиболее часто встречающихся и наиболее типичных ЗсП. При этом выделены классы задач, решаемых по единой методике.
Рассматриваются аналитические методы решения ЗсП, сводящиеся к исследованию линейных или квадратных уравнений (неравенств), а также квадратного трехчлена. Такой выбор обусловлен тем, что курс школьной математики ограничен «вглубь», по существу, «теорией квадратичного».
Линейные уравнения
Определение. Уравнение вида ax=b, где a, b принадлежат множеству всех действительных чисел, будем называть стандартным видом линейного уравнения. Всевозможные варианты, возникающие при решении линейных уравнений, отразим в блок–схеме I.
Количество корней линейного уравнения отразим в блок-схеме II:
Пример 1. Для всех действительных значений параметра m решите уравнение m 2 x–2=4x+m.
Решение. Приведем заданное линейное уравнение к стандартному виду:
m 2 x–2=4x+m, m 2 x–4x=m+2, (m 2 –4)x=m+2.(1)
Следуя схеме I, рассмотрим два случая для коэффициента при x:
1)если m 2 – 4 не равно 0, m не равно ±2, то x=(m+2)/(m 2 -4), x=1/(m–2);
а) при m = –2 уравнение (1) примет вид 0х=0, отсюда х – любое действительное число;
б) при m = 2 уравнение (1) примет вид 0х= 4, отсюда следует, что корней нет.
Ответ. Если m 2 то x=1/(m–2); если m= – 2, то x – любое действительное число; если m=2, то корней нет.
Пример 2. При каких значениях параметра k уравнение 2(k–2x)=kx+3 не имеет корней?
Решение. 2(k–2x)=kx+3, (k+4)x=2k–3. В силу схемы II уравнение не имеет корней, если k+4=0 и 2k–3 не равно 0 => k= –4 и k не равно 1,5 => k = –4.
Ответ. k=–4.
Системы линейных уравнений
Определение 1. Система называется совместной, если она имеет хотя бы одно решение.
Определение 2. Система называется несовместной, если она не имеет ни одного решения.
Количество решений системы линейных уравнений отразим в блок-схеме III.
Замечание. Так как уравнение прямой y=kx+b в общем виде записывается следующим образом ax+by+c=0, то взаимное расположение двух прямых отразим в блок-схеме IV.
Пример. При каких значениях параметра c система из двух уравнений c 2 x+(2–c)y–4=c3 и (2c–1)y+cx+2=c 5 совместна?
Решение. Запишем систему в стандартном виде: c 2 x+(2–c)y=c 3 +4 и cx+(2c–1)y=c 5 –2. Сначала найдем значения c, при которых эта система не имеет решений. В силу схемы III имеем условие,
c 2 /с=(2-с)/(2с–1), с не равно (c 3 +4)/(c 5 –2),
которое равносильно системе из уравнения и неравенства
с=(2–с)/(2с–1) и с не равно (c 3 +4)/(c 5 –2).
Решением системы является с=1. Итак, система имеет решения при всех действительных значениях с, кроме с=1.
Ответ. с — любое действительное число, с не равно 1.
Линейные неравенства
Определение. Неравенство вида ax>b, ax b, ax b, отразим в блок-схеме V.
Пример. Для всех значений параметра m решите неравенство 5x–m>mx–3.
Решение. 5x–m>mx–3, (5–m)x>m–3.
Следуя схеме V, рассмотрим три случая для коэффициента при х:
2)если 5–m 5, то x 2. Откуда следует, что решений нет.
Ответ. Если m (m–3)/(5–m); если m=5, то решений нет; если m>5, то х 2 +bx+c=0, где a, b, c — любые действительные числа, a>0, называется квадратным уравнением относительно действительного переменного x.
Ситуации, возникающие при решении квадратных уравнений, отразим в блок–схеме VI.
Пример. При каких значениях параметра c уравнение (c–2)x 2 +2(с–2)x+2=0 не имеет корней?
Решение. Рассмотрим два случая:
1) если с–2 не равно 0, c не равно 2, то D 2 –2(c–2) 2 +(c+4)x+c+7=0 имеет только отрицательные корни?
Решение. В силу условия задачи необходимо рассмотреть два случая (линейный и квадратичный):
1) если c–1=0, c=1, то уравнение примет вид 5x+8=0, x= –5/8 – отрицательный корень;
2) если c–1 не равно 0, c не равно 1, то, следуя схеме VII, получим систему
Решением ее являются промежутки –22/3 2 +bx+c, где a не равно 0, называется квадратичной. График квадратичной функции называется параболой.
Абсциссы точек пересечения параболы y=ax 2 +bx+c с осью (Ox) являются корнями уравнения ax 2 +bx+c=0.
Учитывая это, отразим взаимное расположение параболы и оси (Ox) в следующей схеме:
Замечание. Если уравнение параболы имеет вид y=a(x–p) 2 +q, то (p; q) – координаты вершины параболы.
Пример 1. При каких значениях параметра a вершина параболы y=(x–7a) 2 +a 2 –10+3a лежит в III координатной четверти?
Решение. Пусть (x0, y0) – координаты вершины параболы. В силу замечания имеем x0=7a, y0=a 2 –10+3a. Так как вершина параболы лежит в третьей четверти, то
Ответ. –5
Пример 2. При каких значениях параметра b график функции y=(4–b 2 )x 2 +2(b+2)x–1 лежит ниже оси (Ox)?
Решение. Рассмотрим два случая.
1. Пусть 4–b 2 =0, b= + 2;
1) если b=2, то прямая y=8x–1 не лежит ниже оси (Ox);
2) если b= –2, то прямая y= –1 лежит ниже оси (Ox).
2. Пусть 4–b 2 не равно 0. Тогда в соответствии со схемой VIII получим
Объединяя ответы, получим b 2 +bx+c=0. Введем функцию y(x)= ax 2 +bx+c. Тогда расположение корней этого уравнения на числовой оси отразим в блок–схеме IX.
Следствие. С учетом схемы IX схема VII для знаков корней квадратного уравнения примет следующий вид:
Пример. При каких значениях параметра a корни уравнения x 2 –2(a+3)x+a 2 +6,25a+8=0 больше 2?
Решение. Введем функцию y(x)=x 2 –2(a+3)x+a 2 +6,25a+8; x0 – абсцисса вершины этой параболы. Так как корни уравнения находятся справа от числа 2, то в соответствии со схемой IX имеем:
Решение. Данная задача равносильна следующей: при каких значениях параметра b система
имеет одно решение?
Решим неравенство (2): 2x 2 –2x–1>0, x1,2=0,5(1±(3) 1/2 ), x 1/2 ) или x>0,5(1+(3) 1/2 ).
Найдем корни уравнения (1): D=(2b–7) 2 , x1=2, x2=2b–5. Поскольку корень x1=2 удовлетворяет неравенству (2), то система имеет одно решение в следующих случаях:
1) если x2=2b–5 не удовлетворяет неравенству (2), то 0,5(1–(3) 1/2 ) 1/2 ) или 0,25(11–O3) 1/2 );
Ответ. 0,25(11–(3) 1/2 ) 1/2 ), b=3,5.
Пример 2. При каких значениях параметра p уравнение 5–4sin 2 x–8cos 2 (x/2)=3p имеет корни?
Сделаем замену cosx=t. Тогда заданная задача равносильна следующей: при каких значениях p система
4t2–4t–3p–3=0, (1) -1 2 –4t–3p–3; t0–вершина этой параболы. В силу схемы IX случаи 1, 2 и 3 описываются следующей совокупностью:
Программирование системы уравнений
1 Постановка задачи
2 Решение системы уравнения методом Гаусса
3 Решение уравнения методами Ньютона, Хорд
4 Разработка блок схемы решения системы уравнения методом Гаусса
5 Разработка блок схемы решения уравнения методом Ньютона
6 Разработка блок схемы решения уравнения методом Хорд
7 Язык программирования Turbo Pascal
8 Разработка программы решения системы уравнения методом Гаусса при помощи Turbo Pascal
9 Разработка программы решения уравнения методом Ньютона при помощи Turbo Pascal
10 Разработка программы решения уравнения методом Хорд при помощи Turbo Pascal
Список используемых источников
В основе того или иного языка программирования лежит некоторая руководящая идея, оказывающая существенное влияние на стиль соответствующих программ.
Исторически первой была идея структурирования программ, в соответствии с которой программист должен был решить, какие именно процедуры он будет использовать в своей программе, а затем выбрать наилучшие алгоритмы для реализации этих процедур. Появление этой идеи было следствием недостаточной изученности алгоритмической стороны вычислительных процессов, столь характерной для ранних программных разработок (сороковые — пятидесятые годы). Типичным примером процедурно-ориентированного языка является Фортран – первый и всё ещё один из наиболее популярных языков программирования. Последовательное использование идеи процедурного структурирования программ привело к созданию обширных библиотек программирования, содержащих множество сравнительно небольших процедур, из которых, как из кирпичиков, можно строить «здание» программы.
По мере прогресса в области вычислительной математики акцент в программировании стал смещаться с процедур в сторону организации данных. Оказалось, что эффективная разработка сложных программ нуждается в действенных способах контроля правильности использования данных. Контроль должен осуществляться как на стадии компиляции, так и при прогоне программ, в противном случае, как показала практика, резко возрастают трудности создания крупных программных проектов. Отчётливое осознание этой проблемы привело к созданию Ангола-60, а позже Паскаля, Модулы-2, Си и множества других языков программирования, имеющих более или менее развитые структуры типов данных. Логическим следствием развития этого направления стал модульный подход к разработке программ, характеризующийся стремлением «спрятать» данные и процедуры внутри модуля.
Начиная с языка Симула-67, в программировании наметился новый подход, который получил название объектно-ориентированного программирования (в дальнейшем ООП). Его руководящая идея заключается в стремлении связать данные с обрабатывающими эти данные процедурами в единое целое – объект. Характерной чертой объектов является инкапсуляция (объединение) данных и алгоритмов их обработки, в результате чего и данные, и процедуры во многом теряют самостоятельное значение.
1 Постановка задачи
Цель решения задачи курсовой работы – автоматизация решения системы уравнения методом Гаусса, а так же решения уравнения методами Хорд и Ньютона.
Выходная информация задачи выводиться на экран монитора.
Входная информация задачи поступает путем ввода пользователем данных для решения поставленной задачи
Прекращение решения задачи выполняется при выходе нового программного обеспечения, связанного с решением данной задачи или появление новой версии данного продукта.
2 Решение системы уравнения методом Гаусса
Метод Гаусса— классический метод решения системы линейных алгебраических уравнений (СЛАУ). Состоит в постепенном понижении порядка системы и исключении неизвестных.
Хотя в настоящее время данный метод повсеместно называется методом Гаусса, он был известен и до К. Ф. Гаусса. Первое известное описание данного метода — в китайском трактате «Математика в девяти книгах», составленном между I в. до н.э. и II в. н. э.
Описание метода
Пусть исходная система выглядит следующим образом
Тогда согласно свойству элементарных преобразований над строками эту систему можно привести к ступенчатому виду:
Переменные называются главными переменными. Все остальные называются свободными.
Если , то рассматриваемая система несовместна.
Предположим, что .
Перенесём свободные переменные за знаки равенств и поделим каждое из уравнений системы на свой коэффициент при самом левом ( , где — номер строки):
,
где
Если свободным переменным системы (2) придавать все возможные значения и вычислить через них главные переменные, то мы получим все решения. Так как эта система получена путём элементарных преобразований над исходной системой (1), то по теореме об эквивалентности при элементарных преобразованиях полученное нами решение является решением системы (1).
1: Если в совместной системе все переменные главные, то такая система является определённой.
2: Если количество переменных в системе превосходит число уравнений, то такая система является либо неопределённой, либо несовместной.
Условие совместности.
Упомянутое выше условие может быть сформулировано в качестве необходимого и достаточного условия совместности:
Напомним, что рангом совместной системы называется ранг её основной матрицы (либо расширенной, так как они равны).
Алгоритм решения СЛАУ методом Гаусса подразделяется на два этапа.
1) На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна. А именно, среди элементов первого столбца матрицы выбирают ненулевой, перемещают его на крайнее верхнее положение перестановкой строк и вычитают получавшуюся после перестановки первую строку из остальных строк, домножив её на величину, равную отношению первого элемента каждой из этих строк к первому элементу первой строки, обнуляя тем самым столбец под ним. После того, как указанные преобразования были совершены, первую строку и первый столбец мысленно вычёркивают и продолжают пока не останется матрица нулевого размера. Если на какой-то из итераций среди элементов первого столбца не нашёлся ненулевой, то переходят к следующему столбцу и проделывают аналогичную операцию.
2) На втором этапе осуществляется так называемый обратный ход, суть которого заключается в том, чтобы выразить все получившиеся базисные переменные через небазисные и построить фундаментальную систему решений либо, если все переменные являются базисными, то выразить в численном виде единственное решение системы линейных уравнений. Эта процедура начинается с последнего уравнения, из которого выражают соответствующую базисную переменную (а она там всего одна) и подставляют в предыдущие уравнения, и так далее, поднимаясь по «ступенькам» наверх. Каждой строчке соответствует ровно одна базисная переменная, поэтому на каждом шаге, кроме последнего (самого верхнего), ситуация в точности повторяет случай последней строки.
В простейшем случае алгоритм выглядит так:
3) Обратный ход. Из последнего ненулевого уравнения выражаем базисную переменную через небазисные и подставляем в предыдущие уравнения. Повторяя эту процедуру для всех базисных переменных, получаем фундаментальное решение.
Помимо аналитического решения СЛАУ, метод Гаусса также применяется для:
1) нахождения матрицы, обратной к данной (к матрице справа приписывается единичная такого же размера, что и исходная: , после чего приводится к виду единичной матрицы методом Гаусса—Жордана; в результате на месте изначальной единичной матрицы справа оказывается обратная к исходной матрица: );
2) определения ранга матрицы (согласно следствию из теоремы Кронекера—Капелли ранг матрицы равен числу её главных переменных);
3) численного решения СЛАУ в вычислительной технике (ввиду погрешности вычислений используется Метод Гаусса с выделением главного элемента, суть которого заключена в том, чтобы на каждом шаге в качестве главной переменной выбирать ту, при которой среди оставшихся после вычёркивания очередных строк и столбцов стоит максимальный по модулю коэффициент).
В отличие от матричного метода и метода Крамера, метод Гаусса может быть применен к системам линейных уравнений с произвольным числом уравнений и неизвестных. Суть метода заключается в последовательном исключении неизвестных.
Система т линейных уравнений с п неизвестными имеет вид:
bi — свободные члены (или правые части)
Система линейных уравнений называется совместной , если она имеет решение, и несовместной , если она не имеет решения.
Совместная система называется определенной , если она имеет единственное решение и неопределенной , если она имеет бесчисленное множество решений.
Две совместные системы называются равносильными , если они имеют одно и то же множество решений.
К элементарным преобразованиям системы отнесем следующее:
1) перемена местами двух любых уравнений;
2) умножение обеих частей любого из уравнений на произвольное число, отличное от нуля;
3) прибавление к обеим частям одного из уравнений системы соответствующих частей другого уравнения, умноженных на любое действительное число.
Элементарные преобразования переводят систему уравнений в равносильную ей.
Элементарные преобразования системы используются в методе Гаусса.
Для простоты рассмотрим метод Гаусса для системы трех линейных уравнений с тремя неизвестными в случае, когда существует единственное решение:
( 1 )
1-ый шаг метода Гаусса.
На первом шаге исключим неизвестное х1 из всех уравнений системы (1), кроме первого. Пусть коэффициент . Назовем его ведущим элементом. Разделим первое уравнение системы (1) на а11 . Получим уравнение:
( 2 )
где
Исключим х1 из второго и третьего уравнений системы (1). Для этого вычтем из них уравнение (2), умноженное на коэффициент при х1 (соответственно а21 и а31 ).
Система примет вид:
( 3 )
Верхний индекс (1) указывает, что речь идет о коэффициентах первой преобразованной системы.
2-ой шаг метода Гаусса.
На втором шаге исключим неизвестное х2 из третьего уравнения системы (3). Пусть коэффициент . Выберем его за ведущий элемент и разделим на него второе уравнение системы (3), получим уравнение:
( 4 )
где
Из третьего уравнения системы (3) вычтем уравнение (4), умноженное на Получим уравнение:
Предполагая, что находим
В результате преобразований система приняла вид:
(5)
Система вида (5) называется треугольной.
Процесс приведения системы (1) к треугольному виду (5) (шаги 1 и 2) называют прямым ходом метода Гаусса.
Нахождение неизвестных из треугольной системы называют обратным ходом метода Гаусса.
Для этого найденное значение х3 подставляют во второе уравнение системы (5) и находят х2 . Затем х2 и х3 подставляют в первое уравнение и находят х1 .
В общем случае для системы т линейных уравнений с п неизвестными проводятся аналогичные преобразования. На каждом шаге исключается одно из неизвестных из всех уравнений, расположенных ниже ведущего уравнения.
Отсюда другое называние метода Гаусса – метод последовательного исключения неизвестных.
Если в ходе преобразований системы получается противоречивое уравнение вида 0 = b, где b¹ 0, то это означает, что система несовместна и решений не имеет.
В случае совместной системы после преобразований по методу Гаусса, составляющих прямой ход метода, система т линейных уравнений с п неизвестными будет приведена или к треугольному или к ступенчатому виду.
Треугольная система имеет вид:
Такая система имеет единственное решение, которое находится в результате проведения обратного хода метода гаусса.
Ступенчатая система имеет вид:
Такая система имеет бесчисленное множество решений. Чтобы найти эти решения, во всех уравнениях системы члены с неизвестными хk+1 , … , xk переносят в правую часть. Эти неизвестные называются свободными и придают им произвольные значения. Из полученной треугольной системы находим х1 , … , xk , которые будут выражаться через свободные неизвестные. Подробнее об этом можно узнать в рекомендуемой литературе.
Рассмотренный метод Гаусса легко программируется на ЭВМ и является более экономичным (по числу действий), чем другие методы.
3 Решение уравнения методами Ньютона, Хорд
Метод хорд (способ пропорциональных частей) — численный метод уточнения корня трансцендентного уравнения.
Точный корень уравнения находится на отрезке . Производная на этом промежутке непрерывна и сохраняет постоянный знак. Приближенный корень , при котором , можно найти используя метод хорд. Для этого нужно взять начальное приближение корня и применить к нему итерационную формулу:
линейный уравнение хорда гаусс ньютон
, , если
, , если
, ,
В отличие от метода дихотомии, обращающего внимание лишь на знаки значений функции, но не на сами значения, метод хорд использует пропорциональное деление интервала (рисунок 1).
Рис. 1. Метод хорд
Рис.2. Метод касательных
Здесь вычисляются значения функции на концах отрезка и строится “хорда”, соединяющая точки (a, f(a)) и (b, f(b)). Точка пересечения ее с осью абсцисс
принимается за очередное приближение к корню. Анализируя знак f(z) в сопоставлении со знаком f(x) на концах отрезка, сужаем интервал до [a,z] или [z,b] и продолжаем процесс построения хорд до тех пор, пока разница между очередными приближениями не окажется достаточно малой (в пределах допустимой погрешности) |Zn -Zn-1 | * — корень уравнения, Zn и Zn+1 — очередные приближения, m и M – наименьшее.
Пусть корень уравнения отделен на отрезке [a, b], причем и непрерывны и сохраняют определенные знаки при . Если на некотором произвольном шаге n найдено приближенное значение корня , то можно уточнить это значение по методу Ньютона. Положим
(1)
где считаем малой величиной. Применяя формулу Тейлора, получим:
Внеся эту поправку в формулу (1), найдем следующее (по порядку) приближение корня
Геометрически метод Ньютона эквивалентен замене дуги кривой касательной, проведенной в некоторой точке кривой. В самом деле, положим для определенности, что при и (см. рис.).
Выберем, например, , для которого . Проведем касательную к кривой в точке B0 с координатами .
В качестве первого приближения корня возьмем абсциссу точки пересечения касательной с осью Ox. Через точку снова проведем касательную, абсцисса точки пересечения которой даст второе приближение корня и т.д.
Формулу для уточнения корня можно получить из прямоугольного треугольника , образованного касательной, проведенной в точке , осью абсцисс и перпендикуляром, восстановленным из точки .
Имеем
Так как угол образован касательной и осью абсцисс, его тангенс численно равен величине производной, вычисленной в точке, соответствующей абсциссе точки касания, т.е.
Тогда
или для любого шага n
.
В качестве начальной точки можно принять либо один из концов отрезка [a, b], либо точку внутри этого интервала. В первом случае рекомендуется выбирать ту границу, где выполняется условие
т.е. функция и ее вторая производная в точке должны быть одного знака.
В качестве простейших условий окончания процедуры уточнения корня рекомендуется выполнение условия
Как следует из последнего неравенства, требуется при расчете запоминать три значения аргумента . В практических инженерных расчетах часто применяют сравнение аргументов на текущей и предыдущей итерациях:
При составлении программы решения уравнения методом Ньютона следует организовать многократный расчет приближений для корня. Если удается получить аналитическое выражение для производной, то ее вычисление, а также вычисление можно оформить в виде функций.
4 Разработка блок схемы решения системы уравнения методом Гаусса
5 Разработка блок схемы решения уравнения методом Ньютона
6 Разработка блок схемы решения уравнения методом Хорд
7 Язык программированияTurbo Pascal
Turbo Pascal является реализацией Pascal’я. Самая первая версия Pascal быля разработана на кафедре информатики Стэндфордского университета швейцарским ученым Николаусом Виртом в 1968 году.
С момента появления Pascal на рынке продуктов прошло много времени прежде чем он получил всеобщее признание. В середине 80-х годов американской фирмой Borland International, Inc была создана реализация языка Pascal, известная и по сей день под именем Turbo Pascal. Эта фирма объединила очень быстрый компилятор с редактором текста и добавила к стандартному Паскалю мощное расширение, что способствовало успеху первой версии этого языка.
В 1985 году на рынке ПЭВМ появился язык программирования Турбо Паскаль (версия 3.0) с компилятором стандартного Паскаля. С тех пор Паскаль стал применяться в общеобразовательных, профессионально-технических школах и в сфере высшего образования в качестве «первого» языка программирования. Благодаря простоте использования язык Турбо Паскаль получил широкое распространение и в любительских кругах. Повышению популярности Турбо Паскаля способствовал набор небольших сопутствующих программ (Toos), позволяющих получать чрезвычайно компактную, быструю и легко читаемую программу. Эти качества Турбо Паскаля были высоко оценены и в среде профессиональных программистов. Встроенный редактор текста использует достаточно широко распространенную систему команд, берущую начало от пакета WordStar и хорошо знакомую каждому, кто интенсивно использует ПЭВМ.
В появившемся со временем пакете Турбо Паскаль 4.0 было устранено большинство подвергавшихся критике ограничений компилятора и была повышена производительность системы. Кроме того, новый компилятор версии 4.0 имел существенные отличия от предыдущей версии. Наиболее важным нововведением была ИNIТ-концепция, заимствованная из языка Модула-2. Это дало возможность реализовать в рамках ТП разработку крупных программных продуктов.
С выходом в свет версии 5.0 ТП получил еще большие шансы на благосклонную реакцию со стороны профессиональных пользователей благодаря встроенному в среду программирования интегрированному отладчику, который позволил повысить производительность труда.
Существенно улучшила технические характеристики ТП реализация аппарата перекрытий (overlays), позволяющего строить мощные программные комплексы, рассчитанные на эксплуатацию в малых по объему областях памяти. Суть механизма перекрытий сводится к делению программы на части, поочередно загружаемые по мере необходимости с дискеты или жесткого диска в одну и ту же область памяти, заменяя при этом находившуюся там часть программы.
Кроме того, в ТП 5.0 были расширены возможности отладки программ и обеспечена возможность поддержки расширенной памяти в стандарте Lotus-Intel-Microsoft (SLIMS/EMS 4.0). Сокращение EMS обозначает Expanded Memory Specification (спецификация расширенной памяти). Нельзя путать этот вид дополнительной памяти с другим — Extended Memory. EMS имеется на обычных ПЭВМ класса XT, в то время как Extended Memory — только на машинах АТ-класса (с процессором 286, 386 и выше) при объеме памяти свыше 1 Мбайта.
В этой версии были также исправлены и улучшены библиотеки графических процедур, поставляемые вместе с пакетом ТП и обеспечивающие полную совместимость с графическими адаптерами класса VGA (Video Graphics Array).
В рамках версии ТП 5.5 были осуществлены дальнейшие преобразования в направлении улучшения технических характеристик пакета. Наряду с внутренними улучшениями и новыми возможностями встроенной справочной системы Help, а также большим набором учебных примеров, важным нововведением явилась реализация в языке концепции объектно-ориентированного программирования (ООП).
Через некоторое время на рынке появился ТП 6.0, в котором теоретическая концепция объектно-ориентированного программирования была реализована практически с полным набором объектов, которые могли использоваться для решения прикладных задач. Кроме того, реализация системы меню приведена в соответствие со стандартом SAA (Turbo Vision). В качестве практического примера использования новых возможностей был реализован текстовый редактор, встроенный в IDE
Integrated Development Environment — интегрированную инструментальную оболочку. При этом сторонники программирования на ТП 6.0 получили возможность не только работать со встроенным многооконным текстовым редактором, но и использовать мышь, которая значительно облегчает работу пользователя.
В 1992 году фирма Borland International представила пользователям очередную версию языка Паскаль — Турбо Паскаль 7.0. Наряду со всеми преимуществами, которые унаследованы от предыдущей версии (многооконный режим работы, возможность использования мыши, возможность использования языка программирования низкого уровня Ассемблер, возможность создавать объектно-ориентированные программы), в ТП 7.0 были произведены изменения и улучшения. Во-первых: появилась возможность выделять определенным цветом различные элементы исходного текста (зарезервированные слова, идентификаторы, числа и т. д.), позволяющая даже неопытным пользователям устранять ошибки на этапе ввода исходного текста. Во-вторых: язык программирования ТП 7.0 был расширен (появилась возможность использовать типизированный адресный оператор, открытые массивы и строки и т. д.), что предоставило пользователю дополнительные возможности при решении повседневных задач. В-третьих: был улучшен компилятор, вследствие чего «коды программ» стали более эффективными. В-четвертых: был улучшен интерфейс пользователя. Кроме того, в ТП 7.0 расширены возможности объектно-ориентированного программирования (в частности, расширены и улучшены возможности Turbo Vision).
8 Разработка программы решения системы уравнения методом Гаусса при помощиTurboPascal
A:array[1..N,1..N] of real = ((9.1, 5.6, 7.8),
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Системы линейных уравнений
Обозначим через $ \mathbb A_<> $ любое из множеств $ \mathbb Q_<>, \mathbb R_<> $ или $ \mathbb C_<> $.
Примеры систем уравнений над $ \mathbb R $.
Относительно числа $ m_<> $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_<> $. Если $ m_<>>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных $ x_1=\alpha_<1>,\dots, x_n = \alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
Можно доказать (см. результаты ☟ НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1. система совместна и имеет единственное решение;
2. cистема совместна и имеет бесконечное множество решений;
3. cистема несовместна.
При этом все решения будут находиться в том же множестве $ \mathbb A_<> $, что и коэффициенты системы.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,\dots,x_n $ $$ \left\< \begina_<11>x_1 &+a_<12>x_2&+ \ldots&+a_<1n>x_n &=b_1,\\ a_<21>x_1 &+a_<22>x_2&+ \ldots&+a_<2n>x_n &=b_2,\\ \dots & & & & \dots \\ a_x_1 &+a_x_2&+ \ldots&+a_x_n &=b_m. \end \right. $$ матрицей системы называется матрица $$ A=\left( \begina_ <11>& a_ <12>& \dots & a_ <1n>\\ a_ <21>& a_ <22>& \dots & a_ <2n>\\ \dots &&& \dots \\ a_ & a_ & \dots & a_ \end \right)_ \ ; $$ cтолбец $$ <\mathcal B>= \left( \beginb_ <1>\\ b_ <2>\\ \vdots \\ b_ \end \right) $$ называется столбцом правых частей системы, а столбец $$ X= \left( \beginx_ <1>\\ x_ <2>\\ \vdots \\ x_ \end \right) $$ — столбцом неизвестных. Используя правило умножения матриц, систему можно записать в матричном виде: $$ AX= <\mathcal B>\ . $$ Любое решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы можно также записать в виде столбца: $$ X=\left( \begin\alpha_1 \\ \vdots \\ \alpha_n \end \right) \in \mathbb A^n \ . $$ Матрица, составленная из всех коэффициентов системы уравнений: $$ [A \mid \mathcal B ]= \left( \begina_ <11>& a_ <12>& \dots & a_ <1n>& b_1 \\ a_ <21>& a_ <22>& \dots & a_ <2n>& b_2 \\ \dots &&& & \dots \\ a_ & a_ & \dots & a_ & b_m \end \right)_ \ , $$ т.е. конкатенацией матрицы $ A_<> $ и столбца правых частей $ <\mathcal B>_<> $ называется расширенной матрицей системы л.у.
Решение. Выразим из первого уравнения $ x_ <1>$ $$ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3> <2>$$ и подставим в оставшиеся уравнения $$ 4 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) -3\,x_2-5\,x_3=6 \ <\color\iff > \ 3x_2-3x_3 = 0 $$ $$ \ <\color\iff > \ x_2-x_3=0 \ ; $$ $$ 3 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) +5x_2+9x_3=-8 \ <\color\iff > \ \frac<19> <2>x_2 +\frac<21><2>x_3=-\frac<25> <2>$$ $$ <\color\iff > 19x_2 +21x_3=-25 \ . $$ Два получившихся уравнения не зависят от неизвестной $ x_ <1>$ — она оказалась исключенной из этих уравнений. Иными словами, мы получили новую подсистему уравнений $$ \left\< \beginx_2&-x_3&=0 \\ 19x_2&+21x_3&=-25, \end \right. $$ которой должны удовлетворять неизвестные $ x_ <2>$ и $ x_ <3>$. Продолжаем действовать по аналогии: выразим из первого уравнения $ x_ <2>$ через $ x_ <3>$: $$x_2=x_3 $$ и подставим во второе: $$ 40 x_3 =-25 \ \iff \ x_3=-\frac<5> <8>\ . $$ Итак, значение одной компоненты решения получено. Для нахождения оставшихся подставим значение $ x_ <3>$ в полученные по ходу решения соотношения: $$ x_2=x_3=-\frac<5> <8>\ \Rightarrow \ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>=\frac<1> <4>\ . $$
Ответ. $ x_<1>=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями — те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1. перестановка двух уравнений;
2. умножение обеих частей уравнения на любое отличное от нуля число;
Теорема.Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему л.у. к наиболее простому виду: такому, из которого легко было бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_ <1>$, т.е. $ a_<11>^<> \ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_<21>/a_<11>^<> $. Получим $$\left(a_<22>— \frac>> a_ <12>\right)x_2 + \dots + \left(a_<2n>— \frac>> a_ <1n>\right)x_n = b_2 — \frac>> b_1 \ , $$ Аналогичное преобразование — вычитание из третьего уравнения системы первого, умноженного на $ a_<31>/a_<11>^<> $, позволяет исключить $ x_ <1>$ из этого уравнения, т.е. заменить его на $$\left(a_<32>— \frac>> a_ <12>\right)x_2 + \dots + \left(a_<3n>— \frac>> a_ <1n>\right)x_n = b_3 — \frac>> b_1 \ . $$ Продолжаем процесс далее. В конечном итоге исключаем $ x_ <1>$ из всех уравнений кроме первого: $$ \left\< \begina_<11>x_1 &+a_<12>x_2&+ \ldots&+a_<1n>x_n &=b_1,\\ &a_<22>^<[1]>x_2&+ \ldots&+a_<2n>^<[1]>x_n &=b_2^<[1]>,\\ &\dots & & & \dots \\ &a_^<[1]>x_2&+ \ldots&+a_^<[1]>x_n &=b_m^<[1]>. \end \right. \ \ npu \ \ \begina_^ <[1]>&= & \displaystyle a_ — \fraca_<1k>>> ,\\ b_j^ <[1]>&= & \displaystyle b_j — \fracb_1>> . \end $$ Полученная система эквивалентна исходной системе, однако она имеет более простой вид: в ней выделилась подсиcтема $$ \left\< \begina_<22>^<[1]>x_2&+ \ldots&+a_<2n>^<[1]>x_n &=b_2^<[1]>,\\ \dots & & & \dots \\ a_^<[1]>x_2&+ \ldots&+a_^<[1]>x_n &=b_m^<[1]>, \end \right. $$ которая не зависит от переменной $ x_ <1>$. К этой новой подсистеме можно применить те же рассуждения, что и к исходной системе, поставив теперь целью исключение переменной $ x_ <2>$.
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим, где он может прерваться. Может так случиться, что очередная, $ \ell_<> $-я подсистема имеет коэффициент $ a_<\ell \ell>^ <[\ell-1]>$ равным нулю, что не позволит алгоритму идти дальше — т.е. исключить переменную $ x_<\ell>^<> $ из оставшихся уравнений (в принципе, такое могло случиться уже на первом шаге, если бы коэффициент $ a_<11>^<> $ был бы равен нулю). Возможные варианты дальнейших действий:
1. если хотя бы один коэффициент при $ x_<\ell>^<> $ в одном из оставшихся уравнений отличен от нуля: $ a_^<[\ell-1]>\ne 0^<> $, то это уравнение переставляется с $ \ell_<> $-м;
2. если при всех $ j\ge \ell^<> $ коэффициенты $ a_^ <[\ell-1]>$ равны нулю, то переменная $ x_<\ell>^<> $ не входит ни в одно оставшееся уравнение, и можно перейти к исключению переменной $ x_<\ell+1>^<> $.
Поскольку число переменных конечно, то алгоритм исключения должен завершиться за конечное число шагов. Чем он может завершиться? Окончательная система должна иметь вид: $$ \left\< \begina_<11>x_1 +&a_<12>x_2&+ \ldots& +a_<1 <\mathfrak r>>x_<\mathfrak r>& +a_ <1 ,<\mathfrak r>+1>x_<<\mathfrak r>+1>&+ \ldots + & a_<1n>x_n &=b_1,\\ &a_<22>^<[1]>x_2&+ \ldots& +a_<2 <\mathfrak r>>^ <[1]>x_<\mathfrak r>& +a_<2 ,<\mathfrak r>+1>^ <[1]>x_<<\mathfrak r>+1>&+ \ldots + & a_<2n>^ <[1]>x_n &=b_2^<[1]>,\\ & & \ddots & & & & & \dots \\ & & & a_ <<\mathfrak r><\mathfrak r>>^<[<\mathfrak r>-1]>x_ <\mathfrak r>& + a_ <<\mathfrak r>, <\mathfrak r>+1>^<[<\mathfrak r>-1]>x_<<\mathfrak r>+1>& + \ldots + & a_ <<\mathfrak r>,n>^<[<\mathfrak r>-1]>x_n &=b_<\mathfrak r>^<[<\mathfrak r>-1]>, \\ & & & & & & 0 &=b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>, \\ & & & & & & \dots & \\ & & & & & & 0 &=b_^<[<\mathfrak r>-1]>, \\ \end \right. $$ при $ <\mathfrak r>\le n_<> $. Заметим, что все коэффициенты этой системы будут принадлежать тому же множеству, что и коэффициенты исходной системы.
Предположение . Мы будем считать, что каждое из первых $ <\mathfrak r>_<> $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
Исторический комментарий о Гауссе ☞ ЗДЕСЬ.
Установление множества решений
Теорема.Если хотя бы одно из чисел $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>,\dots , b_^<[<\mathfrak r>-1]> $ отлично от нуля, то исходная система линейных уравнений будет несовместной.
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у. над $ \mathbb R_<> $, в этом же множестве искать решения. Каждое из преобразований метода Гаусса будем обозначать $ \to_<> $.
Пусть теперь $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_^<[<\mathfrak r>-1]>=0 $. Возможны два случая: $ <\mathfrak r>=n_<> $ и $ <\mathfrak r>предположения , имеем $ a_^ <[n-1]>\ne 0 $. Но тогда, поскольку система является конечной стадией прямого хода метода Гаусса, то и все коэффициенты $ a_^<[n-2]>, \dots, a_<22>^<[1]>, a_ <11>$ должны быть отличны от нуля — в противном случае метод Гаусса не остановился бы на системе такого вида; он называется треугольным: Из последнего уравнения системы можно однозначно установить значение $ x_ $: $$x_n=b_n^ <[n-1]>\big/ a_^ <[n-1]>\ .$$ Далее, подставляя это значение в $ (n-1) $-е уравнение системы, выражаем $ x_ $: $$ x_= \frac^ <[n-2]>— a_^<[n-2]>x_>< a_^<[n-2]>>= \frac< b_^ <[n-2]>— a_^ <[n-2]>b_n^ <[n-1]>\Big/ a_^<[n-1]>>< a_^<[n-2]>> . $$ Подставляем полученные значения для $ x_ $ и $ x_ $ в $ (n-2)_<> $-е уравнение системы, выражаем $ x_ $, и т.д., в конце концов приходим к первому уравнению, из которого выражаем $ x_ <1>$ если ранее уже получены выражения для $ x_2,\dots,x_ $.
Теорема.Если прямой ход метода Гаусса заканчивается треугольной системой, т.е. $ \mathfrak r = n_<> $ и $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_^<[<\mathfrak r>-1]>=0 $, то исходная система линейных уравнений имеет единственное решение.
Исследуем теперь случай $ <\mathfrak r>1) : На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_ $ $$ x_n=\alpha_n = b_<\mathfrak r>^<[<\mathfrak r>-1]> \big/ a_ <<\mathfrak r>n>^<[<\mathfrak r>-1]> \ . $$ Если же $ <\mathfrak s>предположения , в этом уравнении имеется хотя бы один ненулевой коэффициент в левой части; пусть $ a_<<\mathfrak r>-1, <\mathfrak k>>^<[<\mathfrak r>-2]>\ne 0_<> $ — первый из них. Поскольку мы преположили, что система является конечной стадией прямого хода метода Гаусса, то $ <\mathfrak k>по крайней мере две переменные, значения которых еще не были зафиксированы на предыдущих шагах. Это следует из предположения, что число уравнений $ <\mathfrak r>_<> $ меньше числа неизвестных $ n_<> $. Такое уравнение допускает бесконечное число решений, любое из которых в ходе дальнейших шагов может быть «доделано» до решения системы.
Теорема.Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е. $ \mathfrak r 2) матрицы $ A_<> $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков; образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Дальнейший матричный анализ метода Гаусса ☞ ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_<> $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Теорема.Cистема
$$ \left\<\begina_<11>x_1 +a_<12>x_2+\ldots+a_<1n>x_n &=&b_1\\ a_<21>x_1 +a_<22>x_2+\ldots+a_<2n>x_n &=&b_2\\ \ldots& & \ldots \\ a_x_1 +a_x_2+\ldots+a_x_n &=&b_n \end\right. $$ имеет единственное решение тогда и только тогда, когда определитель матрицы этой системы отличен от нуля: $$ \left| \begina_ <11>& a_ <12>& \dots & a_ <1n>\\ a_ <21>& a_ <22>& \dots & a_ <2n>\\ \dots &&& \dots \\ a_ & a_ & \dots & a_ \end \right| \ne 0 \ . $$ В этом случае решение можно вычислить поформулами Крамера 3) : $$ x_k =\frac<\det \left[ A_<[1]>|\dots|A_<[k-1]>|<\mathcal B>|A_<[k+1]>|\dots|A_ <[n]>\right]> <\det A>\quad npu \quad k\in \ < 1,\dots,n \>\ . $$ Для получения значения $ x_ $ в числитель ставится определитель, получающийся из $ \det A_<> $ заменой его $ k_<> $-го столбца на столбец правых частей ( здесь $ <> | $ означает конкатенацию).
Решение системы линейных уравнений с квадратной матрицей $ A_<> $ является непрерывной функцией коэффициентов этой системы при условии, что $ \det A_<> \ne 0 $.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее ☞ ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы: $$ AX= <\mathcal B>\quad \Rightarrow \quad X=A^<-1> <\mathcal B>\ . $$ Этот способ малоэффективен при фиксированных числовых $ A_<> $ и $ <\mathcal B>_<> $.
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = <\mathcal B>_1 \quad u \quad A_2 Y = <\mathcal B>_2 \ , $$ при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема [Кронекер, Капелли].Система $ AX= <\mathcal B>$ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ \operatorname\, A = \operatorname\, [ A| <\mathcal B>] \ . $$ При выполнении этого условия, система имеет единственное решение, если число неизвестных $ n_<> $ совпадает с общим значением ранга $ \mathfrak r_<> $, и бесконечное множество решений, если $ n_<> $ больше этого значения.
Доказательство необходимости. Пусть существует решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы, тогда $$\alpha_1 A_<[1]>+\dots+\alpha_n A_<[n]>= <\mathcal B>\ ,$$ т.е. столбец $ <\mathcal B>$ линейно выражается через столбцы $ A_<[1]>,\dots,A_ <[n]>$. Но тогда $$ \operatorname \,\dots,A_<[n]>\>=\operatorname \,\dots,A_<[n]>,<\mathcal B>\> .$$ Следовательно $ \operatorname\, A = \operatorname\, [ A| <\mathcal B>] $.
Доказательство достаточности проводится в следующем пункте. ♦
Пример. Исследовать совместность системы уравнений
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта: система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна. Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность. Оно, фактически, единственно: за все отвечает определитель системы $ \det A_<> $. Если он отличен от нуля — система совместна. $$\det A = \left| \begin<\color<\lambda>> &1&1&1 \\ 1&<\color<\lambda>>&1&1 \\ 1&1&<\color<\lambda>>&1 \\ 1&1&1&<\color<\lambda>> \end \right|= \left| \begin(<\color<\lambda>>-1) &(1-<\color<\lambda>>)&0&0 \\ 0&(<\color<\lambda>>-1)&(1-<\color<\lambda>>)&0 \\ 0&0&(<\color<\lambda>>-1)&(1-<\color<\lambda>>) \\ 1&1&1&<\color<\lambda>> \end \right| =(<\color<\lambda>>-1)^3 \left| \begin1 &-1&0&0 \\ 0&1&-1&0 \\ 0&0&1&-1 \\ 1&1&1&<\color<\lambda>> \end \right|= $$ $ =(<\color<\lambda>>-1)^3(<\color<\lambda>>+3) $. По теореме Крамера при $ <\color<\lambda>>\ne 1 $ и при $ <\color<\lambda>>\ne -3 $ решение системы единственно: $$x_1=x_2=x_3=x_4=1/(<\color<\lambda>>+3) \ .$$
Осталось исследовать критические случаи: $ <\color<\lambda>>=1_<> $ и $ <\color<\lambda>>= -3 $: определитель системы обращается в нуль, но система может оказаться совместной. Придется вычислять ранги, но, к счастью, уже числовых матриц (а не зависящих от параметра, как исходная!). При $ <\color<\lambda>>= 1_<> $ имеем $$ \operatorname \left( \begin1 &1&1&1 \\ 1&1&1&1 \\ 1&1&1&1 \\ 1&1&1&1 \end \right)= \operatorname \left( \begin1&1&1&1&1 \\ 1&1&1&1&1 \\ 1&1&1&1&1 \\ 1&1&1&1&1 \end \right)=1 \ , $$ и система совместна. Она эквивалентна единственному уравнению $$x_1+x_2+x_3+x_4=1 \ ,$$ которое имеет бесконечно много решений.
Ответ. Система несовместна при $ <\color<\lambda>> = -3 $; она имеет бесконечное множество решений при $ <\color<\lambda>> = 1_<> $ и единственное решение при $ <\color<\lambda>> \not\in \ <-3,1\>$.
Система однородных уравнений
$$ \left\< \begina_<11>x_1 &+a_<12>x_2&+ \ldots&+a_<1n>x_n &=0,\\ a_<21>x_1 &+a_<22>x_2&+ \ldots&+a_<2n>x_n &=0,\\ \dots & & & \dots & \\ a_x_1 &+a_x_2&+ \ldots&+a_x_n &=0 \end \right. $$ всегда совместна: она имеет тривиальное решение $ x_1=0,\dots,x_n=0 $. Для того, чтобы у нее существовало еще и нетривиальное решение необходимо и достаточно, чтобы определитель ее матрицы был равен нулю.
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_<3>) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_<> $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений: $$ \left\< \beginax_1+by_1+c & =0\\ ax_2+by_2+c & =0\\ ax_3+by_3+c & =0 \end \right. $$ Получившаяся система является однородной, условие существования у нее нетривиального решения (т.е. набора $ (a,b,c)_<> $ при хотя бы одном из чисел отличном от нуля): $$ \left|\beginx_1 & y_1 & 1 \\ x_2 & y_2 & 1 \\ x_3 & y_3 & 1 \end \right|=0 . $$ ♦
Доказать, что для совместности системы
$$ \left\< \begina_<11>x_1+a_<12>x_2+a_<13>x_3 &=& b_1 \\ a_<21>x_1+a_<22>x_2+a_<23>x_3 &=& b_2 \\ a_<31>x_1+a_<32>x_2+a_<33>x_3 &=& b_3 \\ a_<41>x_1+a_<42>x_2+a_<43>x_3 &=& b_4 \end \right. $$ необходимо, чтобы было выполнено условие $$ \left| \begina_<11>&a_<12>& a_ <13>& b_1 \\ a_<21>&a_<22>& a_ <23>& b_2 \\ a_<31>&a_<32>& a_ <33>& b_3 \\ a_<41>&a_<42>& a_ <43>& b_4 \end \right|=0 \quad . $$ Является ли это условие достаточным для совместности?
An elementary treatise on determinants
в следующей формулировке.
Теорема.Для того чтобы система $ n_<> $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним.
Ответ ☞ ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ \operatorname (A)=\operatorname[A\mid \mathcal B ] =\mathfrak $. По определению ранга матрицы, в матрице $ A $ существует минор порядка $ \mathfrak $, отличный от нуля; этот же минор останется и минором расширенной матрицы $ [ A\mid \mathcal B ] $. Пусть, для определенности, ненулевой минор находится в левом верхнем углу матрицы 4) : $$ \Delta = A\left( \begin1 & 2 & \dots & \mathfrak \\ 1 & 2 & \dots & \mathfrak \end \right) = \left| \begina_ <11>& a_ <12>& \dots & a_<1\mathfrak> \\ a_ <21>& a_ <22>& \dots & a_<2\mathfrak> \\ \dots &&& \dots \\ a_<\mathfrak1> & a_<\mathfrak2> & \dots & a_ <\mathfrak\mathfrak> \end \right| \ne 0 \ . $$ Тогда первые $ \mathfrak $ строк матрицы $ A $ линейно независимы, а остальные будут линейно выражаться через них. Это же утверждение будет справедливо и для строк матрицы $ [A\mid \mathcal B] $. Умножая первые $ \mathfrak $ уравнений системы на соответствующие числа и складывая их, получим любое оставшееся уравнение. Таким образом, система уравнений может быть заменена эквивалентной ей системой из первых $ \mathfrak $ уравнений: $$ \left\< \begina_<11>x_1+\dots+a_<1\mathfrak>x_<\mathfrak>&+a_<1,\mathfrak+1>x_<\mathfrak+1>+ \dots +a_<1n>x_n&=&b_1, \\ \dots & & & \dots \\ a_<\mathfrak1>x_1+\dots+a_<\mathfrak\mathfrak>x_<\mathfrak>& +a_<\mathfrak,\mathfrak+1>x_<\mathfrak+1>+\dots +a_<\mathfrakn>x_n&=&b_\mathfrak \end \right. \quad \iff \quad A^ <\prime>X=<\mathcal B>^ <\prime>$$ Если $ \mathfrak=n $, то матрица $ A^ <\prime>$ квадратная. По предположению $ \det A^ <\prime>\ne 0 $. По теореме Крамера решение такой системы единственно.
Пусть теперь $ \mathfrak произвольных фиксированных значениях $ x_<\mathfrak+1>,\dots,x_n $: $$ x_j=\frac< \left| \begina_ <11>& \dots &a_ <1,j-1>&\left[ b_1-(a_<1,\mathfrak+1>x_<\mathfrak+1>+\dots +a_<1n>x_n) \right] &a_<1,j+1>& \dots &a_<1\mathfrak> \\ \dots &&&\dots&&& \dots \\ a_<\mathfrak1> & \dots &a_<\mathfrak,j-1> & \left[ b_<\mathfrak>- (a_<\mathfrak,\mathfrak+1>x_<\mathfrak+1>+\dots +a_<\mathfrakn>x_n) \right] &a_<\mathfrak,j+1>& \dots &a_<\mathfrak\mathfrak> \end \right| > <\Delta>$$ $$ \mbox <при>\ j\in \<1,\dots, \mathfrak\> . $$ Таким образом, в этом случае система имеет бесконечное множество решений. Используя свойство линейности определителя по столбцу (см. свойство 5 ☞ ЗДЕСЬ ), формулы можно переписать в виде $$ x_j=\beta_j + \gamma_+1>x_<\mathfrak+1>+\dots+\gamma_x_n \ npu \ j\in \ <1,\dots, \mathfrak\> \ . $$ Здесь $$ \beta_j =\frac<1> <\Delta>\left| \begina_ <11>& \dots &a_ <1,j-1>& b_1 &a_<1,j+1>& \dots &a_<1\mathfrak> \\ \vdots &&&\vdots&&& \vdots \\ a_<\mathfrak1> & \dots &a_<\mathfrak,j-1> & b_<\mathfrak> &a_<\mathfrak,j+1>& \dots &a_<\mathfrak\mathfrak> \end \right|\, , $$ $$ \gamma_ = -\frac<1> <\Delta>\left| \begina_ <11>& \dots &a_ <1,j-1>& a_ <1k>&a_<1,j+1>& \dots &a_<1\mathfrak> \\ \vdots &&&\vdots&&& \vdots \\ a_<\mathfrak1> & \dots &a_<\mathfrak,j-1> & a_<\mathfrakk> &a_<\mathfrak,j+1>& \dots &a_<\mathfrak\mathfrak> \end \right| \ . $$ Эти формулы называются общим решением системы $ A X=\mathcal B $. Участвующие в них переменные $ x_<\mathfrak+1>,\dots,x_n $ называются основными (или свободными), а $ x_1,\dots,x_<\mathfrak> $ — зависимыми. Решение, получающееся из общего решения фиксированием значений основных переменных, называется частным решением системы уравнений.
Пример. Исследовать совместность и найти общее решение системы уравнений:
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров: $$ |2| \ne 0,\quad \left| \begin2 & 1 \\ 6 & 2 \end \right| \ne 0, \quad \left| \begin2 & 1 & 2 \\ 6 & 2 & 4 \\ 4 & 1 & 1 \end \right|=2 \ne 0 \ , $$ а все миноры, окаймляющие последний, равны нулю. Итак, $ \operatorname (A) =3 $. Для нахождения ранга расширенной матрицы $ [A\mid \mathcal B] $ достаточно проверить окаймление найденного ненулевого минора третьего порядка с помощью элементов взятых из столбца правых частей. Имеется всего один такой минор, и он равен нулю. Следовательно $ \operatorname[ A\mid \mathcal B ] =3 $, система совместна, и имеет бесконечное множество решений.
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках, что означает линейную независимость соответствующих уравнений. Третье уравнение линейно зависит от остальных, и может быть отброшено. Далее, указанный базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $. Следовательно оставшиеся уравнения могут быть разрешены относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ — основные. Использование формулы дает общее решение $$ \beginx_1&=&\frac<\left| \begin2 & 1 & 2 \\ 3 & 2 & 4 \\ 1 & 1 & 1 \end \right|> <\displaystyle 2>-x_2\frac<\left| \begin-1 & 1 & 2 \\ -3 & 2 & 4 \\ -2 & 1 & 1 \end \right|> <\displaystyle 2>-x_5\frac<\left| \begin3 & 1 & 2 \\ 5 & 2 & 4 \\ 2 & 1 & 1 \end \right|> <\displaystyle 2>=-\frac<1><2>+\frac<1><2>x_2+\frac<1><2>x_5, \\ & & \\ x_3&=&\frac<\left| \begin2 & 2 & 2 \\ 6 & 3 & 4 \\ 4 & 1 & 1 \end \right|> <\displaystyle 2>-x_2\frac<\left| \begin2 & -1 & 2 \\ 6 & -3 & 4 \\ 4 & -2 & 1 \end \right|> <\displaystyle 2>-x_5\frac<\left| \begin2 & 3 & 2 \\ 6 & 5 & 4 \\ 4 & 2 & 1 \end \right|><\displaystyle 2>=3-4x_5, \\ & & \\ x_4 &=&\frac<\left| \begin2 & 1 & 2 \\ 6 & 2 & 3 \\ 4 & 1 & 1 \end \right|> <\displaystyle 2>-x_2\frac<\left| \begin2 & 1 & -1 \\ 6 & 2 & -3 \\ 4 & 1 & -2 \end \right|> <\displaystyle 2>-x_5\frac<\left| \begin2 & 1 & 3 \\ 6 & 2 & 5 \\ 4 & 1 & 2 \end \right|> <\displaystyle 2>= 0. \end $$ Решим теперь ту же задачу, воспользовавшись методом Гаусса исключения переменных в системе линейных уравнений: $$ \left\< \begin2x_1&-x_2&+x_3&+2x_4&+3x_5&=&2, \\ &&x_3&+2x_4&+4x_5&=&3, \\ &&&x_4&&=&0 \end \right. $$ Используя обратный ход метода Гаусса, снова приходим к полученным формулам.
Ответ. Общее решение системы: $ x_1=1/2 (x_2+x_5-1),\ x_3=3-4\,x_5,\ x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ \beta_j $ представляет решение системы, получаемое при $ x_<\mathfrak+1>=0,\dots,x_n=0 $. Величины же коэффициентов $ \gamma_ $ вовсе не зависят от правых частей системы и будут одинаковыми при любых значениях $ b_1,\dots,b_m $. В частности, если $ b_1=0,\dots,b_m=0 $, то в формулах величины $ \beta_j $ обращаются в нуль и эти формулы превращаются в $$ x_j=\gamma_+1>x_<\mathfrak+1>+\dots+\gamma_x_n \ npu \ j\in \<1,\dots, \mathfrak\> \ . $$
Вывод. Формула общего решения системы $ A X=\mathcal B $: $$ x_j=\beta_j + \gamma_+1>x_<\mathfrak+1>+\dots+\gamma_x_n \ npu \ j\in \ <1,\dots, \mathfrak\> $$ состоит из двух частей: слагаемые, не содержащие свободных переменных, определяют частное решение неоднородной системы: $$ x_1= \beta_1,\dots, x_<\mathfrak>= \beta_<\mathfrak>,x_<\mathfrak+1>=0,\dots,x_n=0 \ ; $$ оставшиеся после их отбрасывания формулы задают общее решение системы $ AX=\mathbb O $. Этот результат обобщается в следующей теореме.
Теорема.Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Доказательство тривиально если система $ A X=\mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением $$ A(X_2-X_1)=\mathbb O , $$ т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=\mathbb O $. ♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю: $$ \left\< \begina_<11>x_1 &+a_<12>x_2&+ \ldots&+a_<1n>x_n &=0,\\ a_<21>x_1 &+a_<22>x_2&+ \ldots&+a_<2n>x_n &=0,\\ \dots & & & \dots & \\ a_x_1 &+a_x_2&+ \ldots&+a_x_n &=0. \end \right. $$ или, в матричном виде: $$ A_X=<\mathbb O>_ $$
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру, если матрица $ A_<> $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет. Теорема Кронекера-Капелли утверждает, что условие $ \det (A_<>) = 0 $ является и достаточным для существования нетривиального решения.
Теорема 1.Для того, чтобы система однородных уравнений с квадратной матрицей $ A_<> $ имела нетривиальное решение необходимо и достаточно, чтобы $ \det (A_<>) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_<> $ имеет место следующий общий результат.
Теорема 2.Если $ \operatorname (A)=\mathfrak r 5) $ A_^<> $.
Теорема 3.Множество решений системы однородных уравнений образует линейное подпространство пространства $ \mathbb A^ $. Размерность этого подпространства равна $ n-\mathfrak r $, а фундаментальная система решений образует его базис.
Пусть матрица системы $ AX=\mathbb O $ квадратная и
$$ \operatorname (A) =n_<>-1 \, .$$ Доказать, что если ненулевой минор матрицы порядка $ n_<>-1 $ соответствует какому-нибудь элементу $ j_<> $-й строки, то система алгебраических дополнений к элементам $ a_,\dots,a_^<> $ этой строки составляет ФСР для $ AX=\mathbb O_<> $. Например, для системы $$ \left\< \begina_<11>x_1 +a_<12>x_2+a_<13>x_3&=0,\\ a_<21>x_1 +a_<22>x_2+a_<23>x_3&=0 \end \right. $$ ФСР состоит из решения $$ x_1=\left| \begina_ <12>& a_ <13>\\ a_ <22>& a_ <23>\end \right| , \ x_2=-\left| \begina_ <11>& a_ <13>\\ a_ <21>& a_ <23>\end \right| , \ x_3=\left| \begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right| \ , $$ если только хотя бы один из миноров отличен от нуля.
Теперь обсудим способы нахождения ФСР.
1. Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_<1>,\dots,x_ <\mathfrak r>$, т.е. общее решение задается формулами $$ x_j=\gamma_+1>x_<\mathfrak+1>+\dots+\gamma_x_n \ npu \ j\in \<1,\dots, \mathfrak\> \ . $$ Иными словами, вектор столбец $$ X=\left(\begin\gamma_<1,\mathfrak+1>x_<\mathfrak+1>+\dots+\gamma_<1n>x_n \\ \gamma_<2,\mathfrak+1>x_<\mathfrak+1>+\dots+\gamma_<2n>x_n \\ \vdots \\ \gamma_<\mathfrak,\mathfrak+1>x_<\mathfrak+1>+\dots+\gamma_<\mathfrakn>x_n \\ x_<\mathfrak+1> \\ x_<\mathfrak+2> \\ \vdots \\ x_ \end\right) $$ будет решением однородной системы при любых наборах значений основных переменных $ x_<\mathfrak+1>,\dots,x_ $. Представим этот вектор в виде суммы векторов: $$ =x_<\mathfrak+1> \underbrace< \left(\begin\gamma_<1,\mathfrak+1> \\ \gamma_<2,\mathfrak+1> \\ \vdots \\ \gamma_<\mathfrak,\mathfrak+1> \\ 1 \\ 0 \\ \vdots \\ 0 \end\right)>_ + x_<\mathfrak+2> \underbrace<\left(\begin\gamma_<1,\mathfrak+2> \\ \gamma_<2,\mathfrak+2> \\ \vdots \\ \gamma_<\mathfrak,\mathfrak+2> \\ 0 \\ 1 \\ \vdots \\ 0 \end\right)>_+\dots+ x_ \underbrace<\left(\begin\gamma_ <1n>\\ \gamma_ <2n>\\ \vdots \\ \gamma_<\mathfrakn> \\ 0 \\ 0 \\ \vdots \\ 1 \end\right)>_> \ . $$ Таким образом, любое решение однородной системы представимо в виде линейной комбинации $ n_<>— \mathfrak r $ фиксированных решений. Именно эти решения и можно взять в качестве ФСР — их линейная независимость очевидна (единицы в нижних частях каждого вектора $ X_ $ расположены на разных местах, и ни какая линейная комбинация столбцов $ \ < X_1,\dots,X_\> $ не сможет обратить их одновременно в нуль).
Оформим этот способ построения ФСР в теорему:
Теорема 4.Если система уравнений $ AX=\mathbb O $ имеет структуру матрицы $ A_<> $ вида:
$$ A = \left[ E_ <\mathfrak r>\mid P_ <\mathfrak r \times (n-\mathfrak r)>\right] \ , $$ то ееФСРсостоит из столбцов матрицы $$ \left[ \begin— P^ <\top>\\ \hline E_ \end \right] \ . $$
Пример. Найти ФСР для системы уравнений
Решение. Приводим систему к трапециевидному виду: $$ \left\< \beginx_1-&x_2+&x_3-&x_4=&0, \\ &&x_3+&4x_4=&0 \end \right. $$ В качестве зависимых переменных можно взять, например, $ x_ <1>$ и $ x_ <3>$. $$ \beginx_1 & x_3 & x_2 & x_4 \\ \hline 1 & 0 & 1 & 0 \\ 5 & -4 & 0 & 1 \end $$
3. Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Теорема.Пусть матрица системы $ AX=\mathbb O $ квадратная и $ \operatorname (A) = <\mathfrak r>$. Тогда характеристический полином матрицы $ A_<> $ имеет вид:
Блок-схемы зависимости множества решений системы уравнений $ AX= \mathcal B $ от комбинации чисел $ n, \mathfrak r $ ☞ ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ \mathbb R^ <3>$. Уравнение $$ a_1x_1+a_2x_2+a_3x_3=b $$ — при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_<> $ — задает плоскость. Если, к примеру, $ a_1\ne 0 $, то из уравнения получаем выражение для $ x_ <1>$ как функции $ x_2,x_3 $: $$ x_1=\frac-\fracx_2-\fracx_3 \ . $$ В этом представлении переменные $ x_ <2>$ и $ x_ <3>$ могут принимать любые вещественные значения независимо друг от друга, а вот переменная $ x_ <1>$ полностью определяется заданием $ x_ <2>$ и $ x_ <3>$. С одной стороны, последняя формула определяет общее решения системы линейных уравнений (которая в нашем частном случае состоит из одного-единственного уравнения); переменные $ x_ <2>$ и $ x_ <3>$ выбраны основными, а $ x_ <1>$ оказывается зависимой. Строго говоря, координаты любой точки плоскости можно представить формулами $$x_1=\frac-\fract-\fracu,\ x_2=t,\ x_3=u \quad npu \quad \\subset \mathbb R \ , $$ которые называются параметрическим представлением плоскости. Таким образом, получили геометрическую интерпретацию общего решения системы уравнений. Идем далее: представим последние формулы в векторной форме: $$ \left( \beginx_1 \\ x_2 \\ x_3 \end \right)= \left( \beginb/a_1- t\, a_2/a_1- u\, a_3/a_1 \\ t \\ u \end \right)= \left( \beginb/a_1\\ 0 \\ 0 \end \right)+ t \left( \begin-a_2/a_1\\ 1 \\ 0 \end \right) + u \left( \begin-a_3/a_1\\ 0 \\ 1 \end \right) \ . $$ Какой геометрический смысл имеет каждое из слагаемых? Первое слагаемое $$ X_0=\left( \beginb/a_1\\ 0 \\ 0 \end \right) $$ получается при задании $ t=0,u=0_<> $ в общем решении. Это — частное решение нашего уравнения и определяет точку, через которую проходит плоскость. Два оставшихся столбца $$ X_1=\left( \begin-a_2/a_1\\ 1 \\ 0 \end \right) \quad u \quad X_2=\left( \begin-a_3/a_1\\ 0 \\ 1 \end \right) $$ не задают решения нашего уравнения — если только $ b\ne 0_<> $. Но оба удовлетворяют однородному уравнению $$ a_1x_1+a_2x_2+a_3x_3=0 , $$ Последнее также определяет плоскость — параллельную исходной и проходящую через начало координат. Первая плоскость получается из второй сдвигом (параллельным переносом) на вектор $ \vec $: и этот факт составляет геометрическую интерпретацию теоремы, сформулированной в конце ☞ ПУНКТА:
Теорема.Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \beginx_1 \\ x_2 \\ x_3 \end \right)=tX_1+uX_2 \ . $$ Векторы пространства $ \vec $ и $ \vec $ являются базисными векторами плоскости — любой вектор $ \vec $, лежащий в плоскости, через них выражается и они линейно независимы. Но $ X_ <1>$ и $ X_ <2>$ определяют фундаментальную систему решений однородного уравнения. Таким образом, мы получили геометрическую интерпретацию для ФСР: она задает базисные векторы плоскости, проходящей через начало координат.
Теперь рассмотрим систему из двух уравнений: $$ \left\<\begina_<11>x_1 +a_<12>x_2+a_<13>x_3 &=&b_1,\\ a_<21>x_1 +a_<22>x_2+a_<23>x_3 &=&b_2. \end\right. $$ Ее можно интерпретировать как пересечение двух плоскостей в $ \mathbb R^ <3>$. Здесь уже возможны варианты: пересечение может оказаться как пустым так и непустым. От чего это зависит? — В соответствии с теоремой Кронекера-Капелли, надо сравнить два числа $$ \operatorname \left( \begina_ <11>& a_ <12>& a_ <13>\\ a_ <21>& a_ <22>& a_ <23>\end \right) \quad u \quad \operatorname \left( \begina_ <11>& a_ <12>& a_ <13>& b_1 \\ a_ <21>& a_ <22>& a_ <23>& b_2 \end \right) \ . $$ Очевидно, ни одно из них не может быть большим $ 2_<> $. Если оба равны $ 2_<> $ и этот факт обеспечен, например, условием $$ \left| \begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right| \ne 0, $$ то решения системы определяют прямую в пространстве. Действительно, при таком условии систему можно разрешить относительно неизвестных $ x_ <1>$ и $ x_ <2>$ и представить общее решение в виде: $$ x_1= \frac<\left|\beginb_1 & a_ <12>\\ b_2 & a_ <22>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>+ \frac<\left|\begina_ <12>& a_ <13>\\ a_ <21>& a_ <23>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>x_3 \ , \quad x_2= \frac<\left|\begina_ <11>& b_ <1>\\ a_ <12>& b_ <2>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>- \frac<\left|\begina_ <11>& a_ <13>\\ a_ <21>& a_ <23>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>x_3 \ . $$ В этих формулах переменная $ x_ <3>$ принимает любое значение, а значения переменных $ x_ <1>$ и $ x_ <2>$ линейно выражаются через $ x_ <3>$. Общее решение фактически задает прямую в параметрическом виде: координаты произвольной ее точки определяются формулами $$ \left( \beginx_1 \\ x_2 \\ x_3 \end \right)=X_0+tX_1 \ , $$ где вектор $$ \quad X_0 = \left(\frac<\left|\begina_ <11>& b_ <1>\\ a_ <12>& b_ <2>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|> , \ \frac<\left|\begina_ <11>& b_ <1>\\ a_ <12>& b_ <2>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>,\ 0\right)^ <\top>$$ задает координаты точки, лежащей на прямой (т.е. принадлежащей пересечению плоскостей), а вектор $$ X_1= \left(\frac<\left|\begina_ <12>& a_ <13>\\ a_ <21>& a_ <23>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>,\ — \frac<\left|\begina_ <11>& a_ <13>\\ a_ <21>& a_ <23>\end \right|><\left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|>, \ 1 \right)^ <\top>$$ является направляющим для прямой. С тем же успехом мы могли бы взять в качестве направляющего вектор, получающийся растяжением $ X_ <1>$: $$ \tilde X_1 = \left(\left|\begina_ <12>& a_ <13>\\ a_ <21>& a_ <23>\end \right|,\ — \left|\begina_ <11>& a_ <13>\\ a_ <21>& a_ <23>\end \right|, \ \left|\begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right| \right)^ <\top>\ . $$ Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begina_<11>x_1 +a_<12>x_2+a_<13>x_3 &=&0,\\ a_<21>x_1 +a_<22>x_2+a_<23>x_3 &=&0. \end\right. $$ Последняя определяет прямую в $ \mathbb R^3 $, проходящую через начало координат. Мы снова получаем интерпретацию теоремы: общее решение неоднородной системы получается сдвигом (параллельным переносом) общего решения однородной системы на вектор $ \vec $.
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ \mathbb R^ <3>$ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы $$ \left( \begina_ <11>& a_ <12>& a_ <13>\\ a_ <21>& a_ <22>& a_ <23>\end \right) $$ оказался меньшим $ 2_<> $. Это равносильно тому, что все миноры второго порядка этой матрицы обращаются в нуль: $$ \left| \begina_ <11>& a_ <12>\\ a_ <21>& a_ <22>\end \right|=0,\ \left| \begina_ <12>& a_ <13>\\ a_ <22>& a_ <23>\end \right| =0,\ \left| \begina_ <11>& a_ <13>\\ a_ <21>& a_ <23>\end \right|=0 \ . $$ Эти условия можно переписать в виде $$ \frac>>=\frac>>=\frac>> \ ; $$ и, если обозначить общую величину последний отношений через $ \tau_<> $, то получаем: $$ (a_<11>,a_<12>,a_<13>)=\tau (a_<21>,a_<22>,a_<23>) . $$ Если вспомнить, что каждый из этих наборов коэффициентов задает вектор $ \vec> $ в $ \mathbb R^ <3>$, перпендикулярный соответствующей плоскости, то, в самом деле, плоскости, определяемые уравнениями, оказываются параллельными. Пересекаться они, как правило, не будут: для пересечения необходимо, чтобы расширенная матрица системы $$ \left( \begina_ <11>& a_ <12>& a_ <13>& b_1 \\ a_ <21>& a_ <22>& a_ <23>& b_2 \end \right) $$ имела ранг меньший $ 2_<> $. Это возможно только при условии когда коэффициенты правых частей удовлетворяют соотношению $$ b_1 = \tau b_2 $$ при величине $ \tau_<> $ определенной выше. При выполнении этого условия второе уравнение получается из первого домножением на $ \tau_<> $ и соответствующие плоскости попросту совпадают.
Перейдем теперь к системе из трех уравнений: $$ \left\< \begina_<11>x_1 +&a_<12>x_2+&a_<13>x_3=&b_1, \\ a_<21>x_1 +&a_<22>x_2+&a_<23>x_3=&b_2, \\ a_<31>x_1 +&a_<32>x_2+&a_<33>x_3=&b_3. \end \right. $$ Вариантов взаимного расположения трех плоскостей в $ \mathbb R^ <3>$ уже значительно больше. Какой из них будет самым распространенным, то есть случаем «как правило»? Геометрически ответ очевиден: если пересечение двух плоскостей определяет, как правило, прямую, то эта прямая пересекается с третьей плоскостью, как правило, в одной-единственной точке. И алгебра подтверждает геометрию: в комментарии к теореме Крамера говорится, что система, число уравнений которой совпадает с числом неизвестных, как правило, имеет единственное решение. Условие для этого случая «как правило» дается той же теоремой Крамера: $$ \left| \begina_ <11>& a_ <12>& a_<13>\\ a_ <21>& a_ <22>& a_ <23>\\ a_ <31>& a_ <32>& a_ <33>\end \right| \ne 0 . $$
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_<> $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_<31>,a_<32>, a_<33>) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений $$ \left\<\begina_<11>x_1 +a_<12>x_2+a_<13>x_3 &=&b_1,\\ a_<21>x_1 +a_<22>x_2+a_<23>x_3 &=&b_2 \end\right. $$ определяет прямую в $ \mathbb R^ <3>$, то оба вектора $ \vec> $ и $ \vec> $ при $ A^<[1]>= (a_<11>,a_<12>, a_<13>) $ и $ A^<[2]>= (a_<21>,a_<22>, a_<23>) $ перпендикулярны этой прямой; любая их комбинация также перпендикулярна этой прямой, а, следовательно, плоскость $$ a_<31>x_1 +a_<32>x_2+a_<33>x_3 =b_3 $$ будет ей параллельна.
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти ☞ ЗДЕСЬ.
Задача решения системы линейных уравнений $$ \left\< \begin3x_1&+4x_2&-x_3&=2, \\ x_1&-2x_2&+3x_3&=1 \end \right. $$ может быть рассмотрена с двух точек зрения. С одной стороны, переписав систему в виде $$ x_1\left(\begin3 \\ 1 \end \right)+ x_2\left(\begin4 \\ -2 \end \right)+ x_3\left(\begin-1 \\ 3 \end \right)= \left(\begin2 \\ 1 \end \right) \ , $$ можно говорить о поиске линейной комбинации столбцов $$ \left(\begin3 \\ 1 \end \right),\ \left(\begin4 \\ -2 \end \right),\ \left(\begin-1 \\ 3 \end \right) $$ равной заданному столбцу $$ \left(\begin2 \\ 1 \end \right) \ . $$ В случае произвольной системы, записанной в матричном виде $$ A_X=\mathcal B_ \ $$ совместность системы интерпретировать в смысле принадлежности столбца $ \mathcal B $ линейной оболочке столбцов $ A_<[1]>,\dots,A_ <[n]>$: $$ \mathcal B=x_1 A_<[1]>+\dots+x_nA_ <[n]>\quad \iff \quad \mathcal B \in \mathcal L (A_<[1]>,\dots,A_<[n]>) \ . $$ В случае положительного ответа числа $ x_<1>,\dots,x_n $ интерпретируются как координаты столбца $ \mathcal B $ в системе столбцов 11) $ \,\dots,A_<[n]>\> $.
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы $$ 3\,x_1+4\,x_2-x_3=2 $$ можно интерпретировать так: скалярное произведение векторов $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OX>> $ равно фиксированному числу $ 2_<> $. Здесь вектора рассматриваются в пространстве строк $ \mathbb R_<>^ <3>$; считается, что каждый вектор имеет начало в начале координат $ \mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ \langle <> \mbox < >\rangle $, то систему уравнений можно переписать в виде $$ \langle \vec<<\mathbf OA>^<[1]>> ,\ \vec<<\mathbf OX>> \rangle=2,\ \langle \vec<<\mathbf OA>^<[2]>> ,\ \vec<<\mathbf OX>> \rangle=1 \quad npu \quad A^ <[1]>= [3,4,-1], A^<[2]>=[1,-2,3] $$ — строках матрицы $ A_<> $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений $$ \left\< \begin3x_1&+4x_2&-x_3&=0, \\ x_1&-2x_2&+3x_3&=0 \end \right. $$ означает подобрать вектор $ \vec<<\mathbf OX>> $ перпендикулярный (ортогональный) одновременно обоим векторам $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OA>^<[2]>> $. Очевидно, что таких векторов в $ \mathbb R^ <3>$ бесконечно много — найдя хотя бы один такой вектор $ \vec<<\mathbf OX>> $, другие получим его растяжением: $ \alpha \cdot \vec<<\mathbf OX>> $ остается перпендикулярным векторам $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OA>^<[2]>> $ при $ \forall \alpha \in \mathbb R $.
Все эти геометрические соображения обобщаются в произвольное пространство $ \mathbb R_<>^ $ строк или столбцов, состоящих из $ n_<> $ вещественных чисел (компонент). Для этого приходится обобщать понятие скалярного произведения. В общем случае оно вводится аксиоматически (и, более того, в одном и том же множестве может быть определено разными способами, см. ☞ ЕВКЛИДОВО ПРОСТРАНСТВО ). Мы сейчас не будем залезать так глубоко в эту аксиоматику, а просто определим скалярное произведение двух строк $ X=[x_1,x_2,\dots,x_n] $ и $ Y=[y_1,y_2,\dots,y_n] $ формулой $$ \langle X,Y \rangle=x_1y_1+x_2y_2+\dots+x_ny_n \ $$ и продекларируем без обоснований, что все привычные нам по случаям $ \mathbb R^ <2>$ и $ \mathbb R^ <3>$ свойства скалярного произведения будут выполнены.
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,\dots,x_n] $, ортогональной всем строкам матрицы $ A_<> $: $$ \langle A^<[1]>,X \rangle=0, \langle A^<[2]>,X \rangle=0,\dots, \langle A^<[m]>,X \rangle=0 \ . $$ Множество таких строк образует линейное подпространство пространства $ \mathbb R_<>^ $, это подпространство является ортогональным дополнением линейной оболочки $ \mathcal L ( A^<[1]>, A^<[2]>,\dots, A^ <[m]>) $ в пространстве $ \mathbb R_<>^ $. Это подпространство называется нуль-пространством матрицы или ядром матрицы $ A_<> $ и обозначается 12) $ <\mathcal K>er (A) $. Фундаментальная система решений системы $ AX=\mathbb O $ составляет базис этого подпространства. Для произвольного линейного пространства количество векторов его базиса называется размерностью пространства и обозначается $ \operatorname $. Во введенных обозначениях теорема из ☞ ПУНКТА переформулируется так:
Теорема. $ \operatorname \left( <\mathcal K>er (A) \right)=n- \mathfrak r $, где $ n_<> $ — количество столбцов матрицы $ A_<> $, а $ \mathfrak r=\operatorname (A) $ — ее ранг.















 называются главными переменными. Все остальные называются свободными.
называются главными переменными. Все остальные называются свободными. , то рассматриваемая система несовместна.
, то рассматриваемая система несовместна. .
. (
(  , где
, где  — номер строки):
— номер строки): ,
,


 , после чего
, после чего  приводится к виду единичной матрицы методом Гаусса—Жордана; в результате на месте изначальной единичной матрицы справа оказывается обратная к исходной матрица:
приводится к виду единичной матрицы методом Гаусса—Жордана; в результате на месте изначальной единичной матрицы справа оказывается обратная к исходной матрица:  );
);
 ( 1 )
( 1 ) . Назовем его ведущим элементом. Разделим первое уравнение системы (1) на а11 . Получим уравнение:
. Назовем его ведущим элементом. Разделим первое уравнение системы (1) на а11 . Получим уравнение: ( 2 )
( 2 )
 ( 3 )
( 3 ) . Выберем его за ведущий элемент и разделим на него второе уравнение системы (3), получим уравнение:
. Выберем его за ведущий элемент и разделим на него второе уравнение системы (3), получим уравнение: ( 4 )
( 4 )
 Получим уравнение:
Получим уравнение: 
 находим
находим 
 (5)
(5)

 уравнения
уравнения  находится на отрезке
находится на отрезке  . Производная
. Производная  на этом промежутке непрерывна и сохраняет постоянный знак. Приближенный корень
на этом промежутке непрерывна и сохраняет постоянный знак. Приближенный корень  , при котором
, при котором  , можно найти используя метод хорд. Для этого нужно взять начальное приближение корня
, можно найти используя метод хорд. Для этого нужно взять начальное приближение корня  и применить к нему итерационную формулу:
и применить к нему итерационную формулу: ,
,  , если
, если 
 ,
, 
 ,
,  ,
, 


 отделен на отрезке [a, b], причем
отделен на отрезке [a, b], причем  и
и  непрерывны и сохраняют определенные знаки при
непрерывны и сохраняют определенные знаки при  . Если на некотором произвольном шаге n найдено приближенное значение корня
. Если на некотором произвольном шаге n найдено приближенное значение корня  , то можно уточнить это значение по методу Ньютона. Положим
, то можно уточнить это значение по методу Ньютона. Положим
 считаем малой величиной. Применяя формулу Тейлора, получим:
считаем малой величиной. Применяя формулу Тейлора, получим:


 касательной, проведенной в некоторой точке кривой. В самом деле, положим для определенности, что
касательной, проведенной в некоторой точке кривой. В самом деле, положим для определенности, что  при
при  (см. рис.).
(см. рис.). , для которого
, для которого  . Проведем касательную к кривой
. Проведем касательную к кривой  .
.
 корня возьмем абсциссу точки пересечения касательной с осью Ox. Через точку
корня возьмем абсциссу точки пересечения касательной с осью Ox. Через точку  снова проведем касательную, абсцисса точки пересечения которой даст второе приближение
снова проведем касательную, абсцисса точки пересечения которой даст второе приближение  корня и т.д.
корня и т.д. , образованного касательной, проведенной в точке
, образованного касательной, проведенной в точке  , осью абсцисс и перпендикуляром, восстановленным из точки
, осью абсцисс и перпендикуляром, восстановленным из точки  .
.

 Тогда
Тогда 
 .
. можно принять либо один из концов отрезка [a, b], либо точку внутри этого интервала. В первом случае рекомендуется выбирать ту границу, где выполняется условие
можно принять либо один из концов отрезка [a, b], либо точку внутри этого интервала. В первом случае рекомендуется выбирать ту границу, где выполняется условие

 . В практических инженерных расчетах часто применяют сравнение аргументов на текущей и предыдущей итерациях:
. В практических инженерных расчетах часто применяют сравнение аргументов на текущей и предыдущей итерациях:
 для корня. Если удается получить аналитическое выражение для производной, то ее вычисление, а также вычисление
для корня. Если удается получить аналитическое выражение для производной, то ее вычисление, а также вычисление  можно оформить в виде функций.
можно оформить в виде функций.



 Из последнего уравнения системы можно однозначно установить значение $ x_
Из последнего уравнения системы можно однозначно установить значение $ x_  На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_  Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin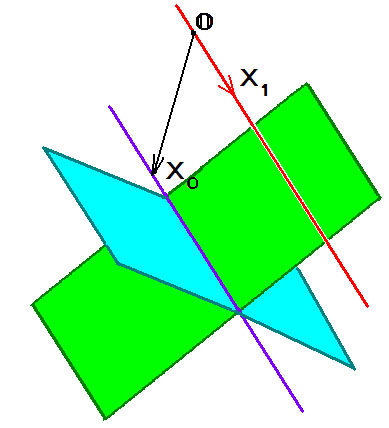 Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin