Второй закон Ньютона. Динамические уравнения движения
Второй закон Ньютона – основной закон динамики. Этот закон выполняется только в инерциальных системах отсчета.
Приступая к формулировке второго закона, следует вспомнить, что в динамике вводятся две новые физические величины – масса тела m и сила  а также способы их измерения. Первая из этих величин – масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие. Вторая – сила
а также способы их измерения. Первая из этих величин – масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие. Вторая – сила  – является количественной мерой действия одного тела на другое.
– является количественной мерой действия одного тела на другое.
Второй закон Ньютона – это фундаментальный закон природы; он является обобщением опытных фактов, которые можно разделить на две категории:
- Если на тела разной массы подействовать одинаковой силой, то ускорения, приобретаемые телами, оказываются обратно пропорциональны массам:
 при F = const. при F = const. |
- Если силами разной величины подействовать на одно и то же тело, то ускорения тела оказываются прямо пропорциональными приложенн силам:
 при m = const. при m = const. |
Обобщая подобные наблюдения, Ньютон сформулировал основной закон динамики:
Сила, действующая на тело, равна произведению массы тела на сообщаемое этой силой ускорение:
|

Это и есть второй закон Ньютона. Он позволяет вычислить ускорение тела, если известна его масса m и действующая на тело сила :
 |
В Международной системе единиц (СИ) за единицу силы принимается сила, которая сообщает телу массой 1 кг ускорение 1 м/с 2 . Эта единица называется ньютоном (Н). Ее принимают в СИ за эталон силы (см. §1.7):
 |
Если на тело одновременно действуют несколько сил (например, 
 и
и  то под силой
то под силой  в формуле, выражающей второй закон Ньютона, нужно пониматьравнодействующую всех сил:
в формуле, выражающей второй закон Ньютона, нужно пониматьравнодействующую всех сил:
 |
 |
Рисунок 1.8.1. Сила – равнодействующая силы тяжести  и силы нормального давления и силы нормального давления  действующих на лыжницу на гладкой горе. Сила вызывает ускорение лыжника действующих на лыжницу на гладкой горе. Сила вызывает ускорение лыжника |
Если равнодействующая сила  то тело будет оставаться в состоянии покоя или равномерного прямолинейного движения. Таким образом, формально второй закон Ньютона включает как частный случай первый закон Ньютона, однако первый закон Ньютона имеет более глубокое физическое содержание – он постулирует существование инерциальных систем отсчета.
то тело будет оставаться в состоянии покоя или равномерного прямолинейного движения. Таким образом, формально второй закон Ньютона включает как частный случай первый закон Ньютона, однако первый закон Ньютона имеет более глубокое физическое содержание – он постулирует существование инерциальных систем отсчета.
Второй закон Ньютона[править | править вики-текст]
Основная статья: Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этогоускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
Масса материальной точки при этом полагается величиной постоянной во времени и независящей от каких-либо особенностей её движения и взаимодействия с другими телами [4][5][6][7] .
Современная формулировка[править | править вики-текст]
| В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. |
При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:

где  — ускорение материальной точки;
— ускорение материальной точки;
 — равнодействующая всех сил, приложенных к материальной точке;
— равнодействующая всех сил, приложенных к материальной точке;
 — масса материальной точки.
— масса материальной точки.
Второй закон Ньютона может быть также сформулирован в эквивалентной форме с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна равнодействующей всех приложенных к ней внешних сил.  |
где  — импульс точки,
— импульс точки,  — её скорость, а
— её скорость, а  — время. При такой формулировке, как и при предшествующей, полагают, что масса материальной точки неизменна во времени [8][9][10] .
— время. При такой формулировке, как и при предшествующей, полагают, что масса материальной точки неизменна во времени [8][9][10] .
Иногда предпринимаются попытки распространить сферу применения уравнения  и на случай тел переменной массы. Однако, вместе с таким расширительным толкованием уравнения приходится существенным образом модифицировать принятые ранее определения и изменять смысл таких фундаментальных понятий, как материальная точка, импульс и сила [11][12] .
и на случай тел переменной массы. Однако, вместе с таким расширительным толкованием уравнения приходится существенным образом модифицировать принятые ранее определения и изменять смысл таких фундаментальных понятий, как материальная точка, импульс и сила [11][12] .
Замечания[править | править вики-текст]
Когда на материальную точку действуют несколько сил, с учётом принципа суперпозиции, второй закон Ньютона записывается в виде:


Второй закон Ньютона, как и вся классическая механика, справедлив только для движения тел со скоростями, много меньшими скорости света. При движении тел со скоростями, близкими к скорости света, используется релятивистское обобщение второго закона, получаемое в рамках специальной теории относительности.
Следует учитывать, что нельзя рассматривать частный случай (при  ) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
В уравнении движения динамической системы входит полный набор переменных, определяющий состояние этой системы (например, все координаты и скорости, или все координаты и импульсы), а также их производные по времени, что позволяет, зная такой набор в некий момент времени, вычислить его для момента времени, отстоящего на малый (бесконечно малый) промежуток времени. В принципе, повторяя этот процесс вычисления последовательно большое (бесконечное) количество раз, можно вычислить значение всех этих переменных для момента времени, как угодно далеко [2] отстоящего от начального. С помощью такого процесса можно (выбрав  достаточно малым, но конечным) получить приближённое численное решение уравнений движения. Однако чтобы получить точное [3] решение, приходится применять другие математические методы.
достаточно малым, но конечным) получить приближённое численное решение уравнений движения. Однако чтобы получить точное [3] решение, приходится применять другие математические методы.
В современной квантовой теории термин уравнение движения нередко используется для обозначения именно только классических уравнений движения, то есть как раз для различения классического и квантового случая. В таком употреблении, например, слова «решение уравнений движения» означают именно классическое (неквантовое) приближение, которое может затем так или иначе использоваться при получении квантового результата или для сравнения с ним. В этом смыслеуравнения эволюции волновой функции не называют уравнениями движения, например упомянутые ниже уравнение Шредингера и уравнение Дирака нельзя назвать уравнением движения электрона. Определённую ясность тут вносит дополнение, указывающее на то, об уравнении движения чего идёт речь: так, хотя уравнение Дирака нельзя назвать уравнением движения электрона, его можно, даже в смысле, обсуждаемом в этом абзаце, назвать классическим уравнением движения спинорного поля.
| | | следующая лекция ==> |
| д) Исполнительные двигатели постоянного тока. | | |
Дата добавления: 2016-01-29 ; просмотров: 4579 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
II Закон Ньютона.Динамические уравнения движения
Система отсчета, относительно которой выполняется закон Ньютона, называется инерциальной.
Второй закон Ньютона: изменение движения пропорционально приложенной силе и происходит в том направлении, в каком действует сила.
Сила – это физическая величина, характеризующая взаимодействие тел, в результате оторого тела приобретают ускорения или деформируются [F]=[Н]=[  ].
].
Но разные тела под влиянием одинаковых сил приобретают разные ускорения, следовательно, ускорение зависит не только от силы, но и от собственных свойств тел. Это свойство называется массой.
Масса – это мера инертности тела [m] = [кг].
Инертность – это способность тела приобретать ускорение.
1Н – сила, сообщающая телу массой 1кг ускорение 1м/с 2 в направлении действия силы.
Запишем второй закон Ньютона
 , (1)
, (1)
но  , следовательно,
, следовательно,
 . (2)
. (2)
Подведем m под знак дифференциала
 , но
, но
 (3)
(3)
импульс (количество движения).
[Р]=[  ] направление импульса совпадает с направлением силы.
] направление импульса совпадает с направлением силы.
Перепишем второй закон Ньютона  ;
;
 . (9)
. (9)
второй закон Ньютона через импульс
Динамические уравнения движения – это второй закон Ньютона, записанный для данного тела. Эти уравнения можно записать в векторном виде и в проекциях на оси координат. Составление и решение таких уравнений – главная задача динамики.
Движение твердого тела можно охарактеризовать двумя видами: поступательным и вращательным (из них состоит любое сложное движение).
При поступательном движении тела все его точки двигаются с одинаковыми скоростями и ускорениями. Если мысленно разбить тело наэлементами с массами Dmi, то по второму закону Ньютона получим
 , (4)
, (4)
где fi – внутренняя сила (сила взаимодействия элементов тела);
Fi – внешняя сила, действующая на каждый элемент.
По третьему закону Ньютона сумма вех внутренних сил равна 0, поэтому, суммируя выражения, получим
 (5)
(5)
 , (6)
, (6)
где  – векторная сумма всех внешних сил;
– векторная сумма всех внешних сил;
 – главный вектор внешних сил.
– главный вектор внешних сил.
Следовательно, рассмотрение поступательного движения твердого тела можно заменить рассмотрением движения одной материальной точки с массой, равной массе тела, и находящейся под действием силы, равной главному вектору внешних сил.
При сложном движении тела все его точки имеют разные скорости и ускорения. Разобьем тело на столь малые элементы, что их скорости и ускорения остаются постоянными
.
Суммируем это равенство fi = 0
 (7)
(7)
главный вектор внешних сил
Однако ускорения всех элементов тела разные, поэтому введем ускорение ас, определяемое равенством
 , (8)
, (8)
где М – масса всего тела.
Умножим левую и правую часть равенства на М, используя  , получим
, получим
 , (9)
, (9)
где ас – ускорение некоторой точкиС, координаты которой
 ;
;  ;
;  , (10)
, (10)
где С – центр масс тела или центр инерции (совпадает с центром приложения равнодействующей сил тяже).
15. Сложение двух гармонических колебаний одинаковой циклической частоты, происходящих вдоль одной прямой.
Пусть  ;
;  ;
;  .
.
Складываемые колебания описываются уравнениями:
 ; (1)
; (1)
 . (2)
. (2)
Так как колебания происходят вдоль одной прямой (вдоль оси  ), то результирующее смещение в любой момент времени равно алгебраической сумме смещений
), то результирующее смещение в любой момент времени равно алгебраической сумме смещений  и
и  :
:
 (3)
(3)
Выполним это сложение геометрически, с помощью векторов амплитуды  и
и  . На рисунке1 изображены положения векторов амплитуды в начальный момент времени. Вектор результирующей амплитуды
. На рисунке1 изображены положения векторов амплитуды в начальный момент времени. Вектор результирующей амплитуды  равен геометрической сумме векторов
равен геометрической сумме векторов  и
и  .
.
Проекции конца вектора  определяет результирующее смещение в начальный момент времени. Так как оба вектора,
определяет результирующее смещение в начальный момент времени. Так как оба вектора,  и
и  , вращаются в процессе колебаний с одной и той же угловой скоростью
, вращаются в процессе колебаний с одной и той же угловой скоростью  , с такой же скоростью будет вращаться и вектор результирующей амплитуды. Следовательно, результирующее колебание представляет собой гармоническое колебание той же частоты и происходит вдоль той же прямой. Из рисунка 1 видно, что
, с такой же скоростью будет вращаться и вектор результирующей амплитуды. Следовательно, результирующее колебание представляет собой гармоническое колебание той же частоты и происходит вдоль той же прямой. Из рисунка 1 видно, что
 ,
,
для произвольного момента времени:
 , (4)
, (4)
где  и
и  — амплитуда и начальная фаза результирующего колебания. Из
— амплитуда и начальная фаза результирующего колебания. Из  по теореме косинусов получаем:
по теореме косинусов получаем:


 (5)
(5)
так как 
 (6)
(6)
Амплитуда результирующего колебания зависит от разности фаз (  ) слагаемых колебаний. Если (
) слагаемых колебаний. Если (  ), где
), где  то
то  и
и  , т.е. если разность фаз равна четному числу
, т.е. если разность фаз равна четному числу  , колебания усиливают друг друга. Если
, колебания усиливают друг друга. Если  , то
, то  и
и  , т.е.
, т.е.
если разность фаз равна нечетному числу  , колебания максимально ослабляют друг друга. В зависимости от разности фаз амплитуда колебания может принимать любые значения, лежащие в интервале:
, колебания максимально ослабляют друг друга. В зависимости от разности фаз амплитуда колебания может принимать любые значения, лежащие в интервале:
 .
.
Динамические уравнения Эйлера


Динамические уравнения Эйлера
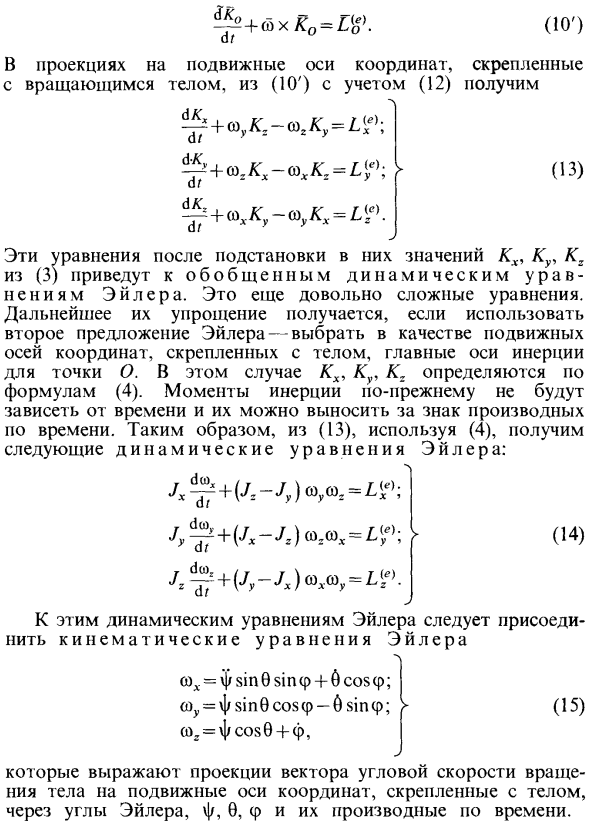
- Динамическое уравнение Эйлера для вращения объекта вокруг неподвижной точки под действием силы можно вывести из теоремы об изменении момента движения. Согласно этой теореме, dKoldt = L ^>, (10) Где Ko — момент движения тела относительно неподвижной точки от вращения тела относительно инерциальной системы отсчета. D> | = X — векторная сумма моментов Т внешней силы, действующей на тело (рис. 135). Среди внешних сил есть сила реакции в фиксированной точке.
Когда снаряд находится в движении, его центр тяжести движется так, как если бы в нем была сосредоточена вся масса тела и к нему были приложены все действующие на снаряд внешние силы. Людмила Фирмаль
Когда (10) представляется проекцией на инерциальную (фиксированную) координатную ось, моменты, которые меняются со временем, в зависимости от конкретного случая основных (3) и (4) главных осей, через Kx, Ku, K В том числе обычное уравнение инерции. Это расчет, который уже должен знать движение тела, и сам должен определяться силой, данной. Чтобы избежать этого, Эйлер предложил проецировать вектор (10) на движущуюся ось координат, прикрепленную к вращающемуся телу.
- Для таких осей момент инерции не зависит от времени. Подготовьте векторное уравнение (10) для проекции на оси подвижных координат, закрепленных на движущемся объекте. По этой причине абсолютная производная по времени от момента движения должна быть выражена как относительная производная по формуле Бора. + К. Болезнь.
Это связано с тем, что система перемещения осей координат имеет ту же угловую скорость, что и само тело, с которым эти оси связаны. Представлено векторное поколение для удобства проецирования Удалить вектор в виде определителя, затем развернуть до элементов первой строки, т.е. | J K I шхко = тсс шу юг = / (шу ^ 1-шхх) + | к * к, кг я + j (azKx-axKz) + H (axKy-ayKx), (12) где i, j и H — единичные векторы, ориентированные вдоль осей координат движущейся системы координат.
В разделе упражнений будет показано, что систему векторов можно всегда привести к таким двум векторам, из которых Ъдин лежит на произвольной прямой, не параллельной главному вектору. Людмила Фирмаль
Используйте уравнение (I) для выражения теоремы об изменении момента движения (10) в следующем виде: Рисунок 135 В проекции на ось подвижной координаты, прикрепленной к вращающемуся телу, с учетом (10 ‘) — (12), ^ + — (15) sog = f cos6 4-f, Это представляет проекцию угловой скорости вращения объекта на движущиеся координатные оси, прикрепленные к объекту через углы Эйлера f, 6, f и их производные по времени.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://poisk-ru.ru/s17604t10.html
http://lfirmal.com/dinamicheskie-uravneniya-ehjlera/