Системы дифференциальных уравнений с примерами решения и образцами выполнения
Также как и обыкновенные дифференциальные уравнения, системы дифференциальных уравнений применяются для описания многих процессов реальной действительности. В частности, к ним относятся различного рода физические и химические процессы, процессы нефте- и газодобычи, геологии, экономики и т.д. Действительно, если некоторые физические величины (перемещение тела, пластовое давление жидкости в фиксированной точке с тремя координатами, концентрация веществ, объемы продаж продуктов) оказываются меняющимися со временем под воздействием тех или иных факторов, то, как правило, закон их изменения по времени описывается именно системой дифференциальных уравнений, т.е. системой, связывающей исходные переменные как функции времени и производные этих функций. Независимой переменной в системе дифференциальных уравнений может выступать не только время, но и другие физические величины: координата, цена продукта и т.д.

Решение систем дифференциальных уравнений
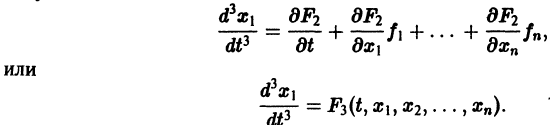
К системе дифференциальных уравнений приводит уже простейшая задача динамики точки: даны силы, действующие на материальную точку; найти закон движения, т. е. найти функции  выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
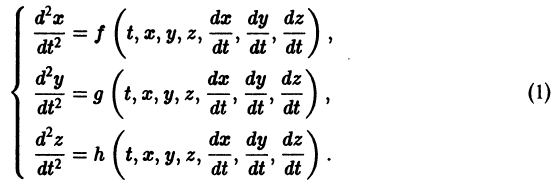
Здесь x, у, z — координаты движущейся точки, t — время, f, g, h — известные функции своих аргументов.
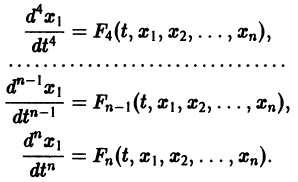
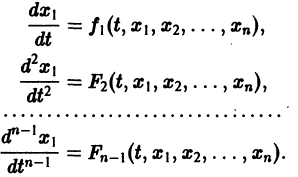
Система вида (1) называется канонической. Обращаясь к общему случаю системы т дифференциальных уравнений с т неизвестными функциями  аргумента t, назовем канонической систему вида
аргумента t, назовем канонической систему вида

разрешенную относительно старших производных. Система уравнений первого порядка, разрешенных относительно производных от искомых функций,

Если  в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из
в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из  уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
Например, одно уравнение
является мастным случаем канонической системы. Положив  в силу исходного уравнения будем иметь
в силу исходного уравнения будем иметь

В результате получаем нормальную систему уравнений

эквивалентную исходному уравнению.
Определение:
Решением нормальной системы (3) на интервале (а, Ь) изменения аргумента t называется всякая система n функций

дифференцируемых на интервале а 
Теорема:
Существования и единственности решения задачи Коши. Пусть имеем нормальную систему дифференциальных уравнений

и пусть функции  определены в некоторой (n + 1) — мерной области D изменения переменных
определены в некоторой (n + 1) — мерной области D изменения переменных  Если существует окрестность
Если существует окрестность  точки
точки  в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным
в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным  то найдется интервал
то найдется интервал  изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям
изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям

Определение:
Система n функций

зависящих от t и n произвольных постоянных  называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
1) при любых допустимых значениях система функций (6) обращает уравнения (3) в тождества,
2) в области функции (6) решают любую задачу Коши.
Решения, получающиеся из общего при конкретных значениях постоянных называются частными решениями.
Обратимся для наглядности к нормальной системе двух уравнений,
Будем рассматривать систему значений t, x1, х2 как прямоугольные декартовы координаты точки трехмерного пространства, отнесенного к системе координат  Решение
Решение
системы (7), принимающее при  значения
значения  определяет в пространстве некоторую линию, проходящую через точку
определяет в пространстве некоторую линию, проходящую через точку  Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Нормальной системе (7) и ее решению можно придать еще такое истолкование: будем независимую переменную t рассматривать как параметр, а решение
системы — как параметрические уравнения кривой на плоскости  Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение
Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение  системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку
системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку  (рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
(рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
Методы интегрирования систем дифференциальных уравнений
Метод исключения
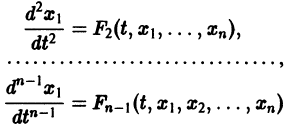
Один из методов интегрирования — метод исключения. Частным случаем канонической системы является одно уравнение n-го порядка, разрешенное относительно старшей производной
Введя новые функции  заменим это уравнение следующей нормальной системой n уравнений:
заменим это уравнение следующей нормальной системой n уравнений:
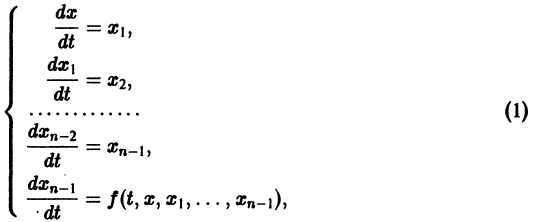
т. е. одно уравнение n-го порядка эквивалентно нормальной системе (1)
Можно утверждать и обратное, что, вообще говоря, нормальная система п уравнений первого порядка эквивалентна одному уравнению порядка n. На этом и основан метод исключения для интегрирования систем дифференциальных уравнений.
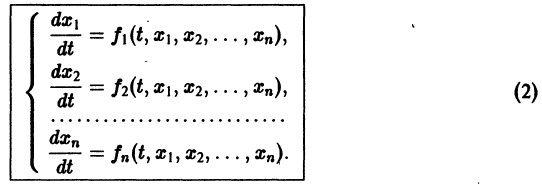
Делается это так. Пусть имеем нормальную систему
Продифференцируем первое из уравнений (2) по t. Имеем

Заменяя в правой части производные  их выражениями
их выражениями  получим
получим

Уравнение (3) снова дифференцируем по t. Принимая во внимание систему (2), получим
Продолжая этот процесс, найдем
Предположим, что определитель
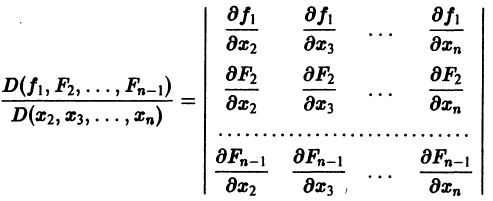
(якобиан системы функций  отличен от нуля при рассматриваемых значениях
отличен от нуля при рассматриваемых значениях 

Тогда система уравнений, составленная из первого уравнения системы (2) и уравнений
будет разрешима относительно неизвестных  При этом выразятся через
При этом выразятся через 
Внося найденные выражения в уравнение
получим одно уравнение n-го порядка

Из самого способа его построения следует, что если  есть решения системы (2), то функция х1(t) будет решением уравнения (5).
есть решения системы (2), то функция х1(t) будет решением уравнения (5).
Обратно, пусть Х1(t) — решение уравнения (5). Дифференцируя это решение по t, вычислим  и подставим найденные значения как известные функции
и подставим найденные значения как известные функции
от t в систему уравнений
По предположению эту систему можно разрешить относительно т. е найти как функции от t.
Можно показать, что так построенная система функций

составляет решение системы дифференциальных уравнений (2). Пример:
Требуется проинтегрировать систему

Дифференцируя первое уравнение системы, имеем

откуда, используя второе уравнение, получаем

— линейное дифференциальное уравнение второго порядка с постоянными коэффициентами с одной неизвестной функцией. Его общее решение имеет вид

В силу первого уравнения системы находим функцию

Найденные функции x(t), y(t), как легко проверить, при любых значениях С1 и С2 удовлетворяют заданной системе.
Функции x(t), y(t) можно представить в виде

откуда видно, что интегральные кривые системы (6) — винтовые линии с шагом  и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
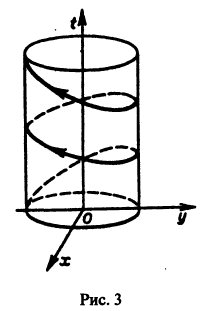
Исключая в формулах (7) параметр t, получаем уравнение
так что фазовые траектории данной системы суть окружности с центром в начале координат — проекции винтовых линий на плоскость хОу.
При А = 0 фазовая траектория состоит из одной точки х = 0, у = 0, называемой точкой покоя системы.
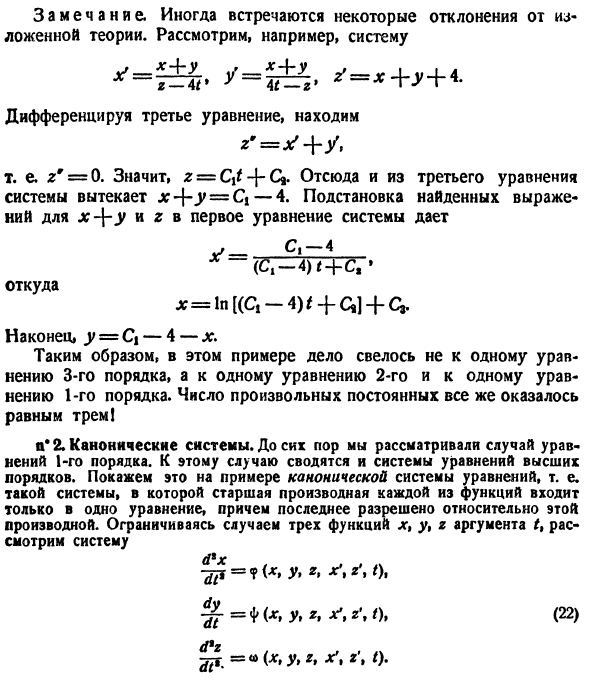
Замечание:
Может оказаться, что функции нельзя выразить через  Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
нельзя заменить эквивалентным уравнением второго порядка относительно х1 или x2. Эта система составлена из пары уравнений 1-го порядка, каждое из которых интегрируется независимо, что дает

Метод интегрируемых комбинаций
Интегрирование нормальных систем дифференциальных уравнений

иногда осуществляется методом интегрируемых комбинаций.
Интегрируемой комбинацией называется дифференциальное уравнение, являющееся следствием уравнений (8), но уже легко интегрирующееся.
Пример:
Складывая почленно данные уравнения, находим одну интегрируемую комбинацию:

Вычитая почленно из первого уравнения системы второе, получаем вторую интегрируемую комбинацию:

Мы нашли два конечных уравнения

из которых легко определяется общее решение системы:

Одна интегрируемая комбинация дает возможность получить одно уравнение

связывающее независимую переменную t и неизвестные функции Такое конечное уравнение называется первым интегралом системы (8). Иначе: первым интегралом системы дифференциальных уравнений (8) называется дифференцируемая функция  не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
Если найдено п первых интегралов системы (8) и все они независимы, т. е. якобиан системы функций  отличен от нуля:
отличен от нуля:
то задача интефирования системы (8) решена (так как из системы
определяются все неизвестные функции 
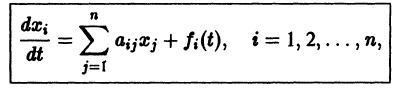
Системы линейных дифференциальных уравнений
Система дифференциальных уравнений называется линейной, если она линейна относительно неизвестных функций и их производных, входящих в уравнение. Система n линейных уравнений первого порядка, записанная в нормальной форме, имеет вид

или, в матричной форме,
Теорема:
Если все функции  непрерывны на отрезке
непрерывны на отрезке  то в достаточно малой окрестности каждой точки
то в достаточно малой окрестности каждой точки  где
где  выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
Действительно, в таком случае правые части системы (1) непрерывны по совокупности аргументов t, и их частные производные по  ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам
ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам 
Введем линейный оператор
Тогда система (2) запишется в виде

Если матрица F — нулевая, т. е.  на интервале (а,b), то система (2) называется линейной однородной и имеет вид
на интервале (а,b), то система (2) называется линейной однородной и имеет вид

Приведем некоторые теоремы, устанавливающие свойства решений линейных систем.
Теорема:
Если X(t) является решением линейной однородной системы

то cX(t), где с — произвольная постоянная, является решением той же системы.
Теорема:
двух решений  однородной линейной системы уравнений является решением той же системы.
однородной линейной системы уравнений является решением той же системы.
Следствие:
с произвольными постоянными коэффициентами сi решений  линейной однородной системы дифференциальных уравнений
линейной однородной системы дифференциальных уравнений
является решением той же системы.
Теорема:
Если  есть решение линейной неоднородной системы
есть решение линейной неоднородной системы

a Xo(t) — решение соответствующей однородной системы

будет решением неоднородной системы 
Действительно, по условию,

Пользуясь свойством аддитивности оператора  получаем
получаем

Это означает, что сумма  есть решение неоднородной системы уравнений
есть решение неоднородной системы уравнений
Определение:
называются линейно зависимыми на интервале a 
при  причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при
причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при  то векторы
то векторы 
 называются линейно независимыми на (а, b).
называются линейно независимыми на (а, b).
Заметим, что одно векторное тождество (5) эквивалентно n тождествам:

называется определителем Вронского системы векторов 
Определение:
Пусть имеем линейную однородную систему

где  матрица с элементами
матрица с элементами  Система n решений
Система n решений

линейной однородной системы (6), линейно независимых на интервале а 
с непрерывными на отрезке  коэффициентами
коэффициентами  является линейная комбинация п линейно независимых на интервале а
является линейная комбинация п линейно независимых на интервале а 
( ) — произвольные постоянные числа).
) — произвольные постоянные числа).
Пример:
имеет, как нетрудно проверить, решения

Эти решения линейно независимы, так как определитель Вронского отличен от нуля:

Общее решение системы имеет вид

(с1, с2 — произвольные постоянные).
Фундаментальная матрица
Квадратная матрица
столбцами которой являются линейно независимые решения  системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
Если Х(t) — фундаментальная матрица системы (6), то общее решение системы можно представить в виде
— постоянная матрица-столбец с произвольными элементами. Полагая в (7) t = t0, имеем

Матрица  называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
Теорема:
О структуре общего решения линейной неоднородной системы дифференциальных уравнений. Общее решение в области  линейной неоднородной системы дифференциальных уравнений
линейной неоднородной системы дифференциальных уравнений

с непрерывными на отрезке коэффициентами aij(t) и правыми частями fi(t) равно сумме общего решения
соответствующей однородной системы и какого-нибудь частного решения  неоднородной системы (2):
неоднородной системы (2):

Метод вариации постоянных
Если известно общее решение линейной однородной системы (6), то частное решение неоднородной системы можно находить методом вариации постоянных (метод Лагранжа).
есть общее решение однородной системы (6), тогда

причем решения Xk(t) линейно независимы.
Будем искать частное решение неоднородной системы

где  неизвестные функции от t. Дифференцируя по t, имеем
неизвестные функции от t. Дифференцируя по t, имеем
Подставляя  в (2), получаем
в (2), получаем

то для определения  получаем систему
получаем систему
или, в развернутом виде,

Система (10) есть линейная алгебраическая система относительно определителем которой является определитель Вронского W(t) фундаментальной системы решений . Этот определитель отличен от нуля всюду на интервале a 
где  — известные непрерывные функции. Интегрируя последние соотношения, находим
— известные непрерывные функции. Интегрируя последние соотношения, находим

Подставляя эти значения  в (9), находим частное решение системы (2)
в (9), находим частное решение системы (2)
(здесь под символом  понимается одна из первообразных для функции
понимается одна из первообразных для функции 
Системы линейных дифференциальных уравнений с постоянными коэффициентами
Рассмотрим линейную систему дифференциальных уравнений
в которой все коэффициенты  — постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
— постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
Мы рассмотрим еще метод Эйлера интегрирования линейных однородных систем дифференциальных уравнений с постоянными коэффициентами. Он состоит в следующем.
Метод Эйлера
Будем искать решение системы
где  — постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на
— постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на  и перенося все члены в одну часть равенства, получаем систему
и перенося все члены в одну часть равенства, получаем систему
Для того, чтобы эта система (3) линейных однородных алгебраических уравнений с n неизвестными  имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
Уравнение (4) называется характеристическим. В его левой части стоит многочлен относительно  степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни
степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни  характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения
характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения  этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде
этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде

где второй индекс указывает номер решения, а первый — номер неизвестной функции. Построенные таким образом п частных решений линейной однородной системы (1)

образуют, как можно проверить, фундаментальную систему решений этой системы.
Следовательно, общее решение однородной системы дифференциальных уравнений (1) имеет вид
где  произвольные постоянные.
произвольные постоянные.
Случай, когда характеристическое уравнение имеет кратные корни, мы рассматривать не будем.
Пример:
Ищем решение в виде


имеет корни 
Система (3) для определения a1, а2 выглядит так:

Подставляя в (*)  получаем
получаем
откуда а21 = а11. Следовательно,

Полагая в  находим a22 = — a12, поэтому
находим a22 = — a12, поэтому

Общее решение данной системы:
Матричный метод
Изложим еще матричный метод интегрирования однородной системы (1). Запишем систему (1) в виде

 матрица с постоянными действительными элементами
матрица с постоянными действительными элементами 
Напомним некоторые понятия из линейной алгебры. Вектор  называется собственным вектором матрицы А, если
называется собственным вектором матрицы А, если
Число называется собственным значением матрицы А, отвечающим собственному вектору g, и является корнем характеристического уравнения
где I — единичная матрица.
Будем предполагать, что все собственные значения  матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует
матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует  матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
Столбцами матрицы Т являются координаты собственных векторов g1, g2 …, gn матрицы А.
Введем еще следующие понятия. Пусть В(t) — матрица, элементы  которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на
которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на  , если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы
, если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы  называется матрица, элементами которой являются производные
называется матрица, элементами которой являются производные  у соответствующих элементов матрицы В(t).
у соответствующих элементов матрицы В(t).
Пусть B(t) — n х n-матрица,
— вектор-столбец. Учитывая правила алгебры матриц, непосредственной проверкой убеждаемся в справедливости формулы

В частности, если В — постоянная матрица, то
так как  есть нуль-матрица.
есть нуль-матрица.
Теорема:
Если собственные значения матрицы А различны, то общее решение системы (7) имеет вид

где g1, g2,…, gn — собственные векторы-столбцы матрицы А,  произвольные постоянные числа.
произвольные постоянные числа.
Введем новый неизвестный вектор-столбец Y(t) по формуле

где Т — матрица, приводящая матрицу А к диагональному виду. Подставляя X(t) из (11) в (7), получим систему
Умножая обе части последнего соотношения слева на  и учитывая, что
и учитывая, что  придем к системе
придем к системе
Мы получили систему из n независимых уравнений, которая без труда интегрируется:

Здесь  — произвольные постоянные числа.
— произвольные постоянные числа.
Вводя единичные n-мерные векторы-столбцы
решение Y(t) можно представить в виде

В силу (11) Х(t) = TY(t). Так как столбцы матрицы Т есть собственные векторы матрицы  собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):
собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):

Таким образом, если матрица А системы дифференциальных уравнений (7) имеет различные собственные значения, для получения общего решения этой системы:
1) находим собственные значения матрицы как корни алгебраического уравнения
2) находим все собственные векторы g1, g2,…, gn;
3) выписываем общее решение системы дифференциальных уравнений (7) по формуле (10).
Пример:
Матрица А системы имеет вид
1) Составляем характеристическое уравнение

Корни характеристического уравнения 
2) Находим собственные векторы

Для = 4 получаем систему
откуда g11 = g12, так что

Аналогично для = 1 находим
3) Пользуясь формулой (10), получаем общее решение системы дифференциальных уравнений
Корни характеристического уравнения могут быть действительными и комплексными. Так как по предположению коэффициенты системы (7) действительные, то характеристическое уравнение
будет иметь действительные коэффициенты. Поэтому наряду с комплексным корнем оно будет иметь и корень *, комплексно сопряженный с . Нетрудно показать, что если g — собственный вектор, отвечающий собственному значению , то * — тоже собственное значение, которому отвечает собственный вектор g*, комплексно сопряженный с g.
При комплексном решение

системы (7) также будет комплексным. Действительная часть
этого решения являются решениями системы (7). Собственному значению * будет отвечать пара действительных решений X1 и -Х2, т. е. та же пара, что и для собственного значения . Таким образом, паре , * комплексно сопряженных собственных значений отвечает пара действительных решений системы (7) дифференциальных уравнений.
Пусть  — действительные собственные значения,
— действительные собственные значения, 
 — комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид
— комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид

где сi — произвольные постоянные.
Пример:
1) Характеристическое уравнение системы

Его корни 
2) Собственные векторы матриц
3) Решение системы

где а1, а2 — произвольные комплексные постоянные.
Найдем действительные решения системы. Пользуясь формулой Эйлера

Следовательно, всякое действительное решение системы имеет


где с1, с2 — произвольные действительные числа.
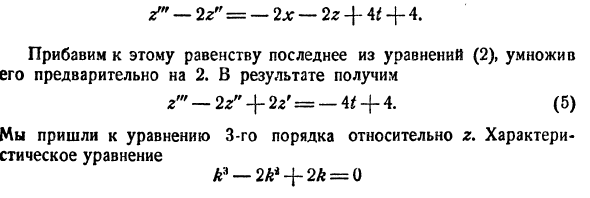
Понятие о системах дифференциальных уравнений
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
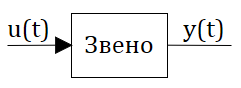
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


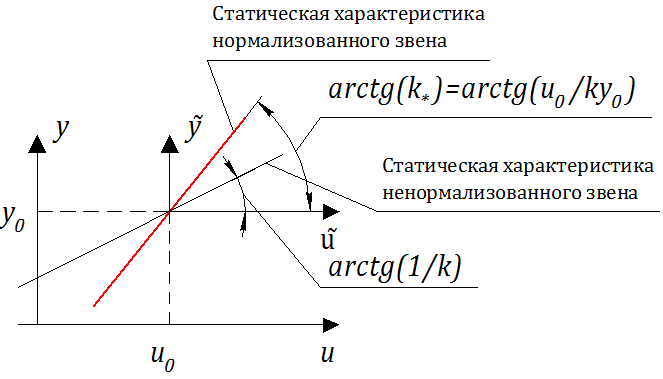
где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
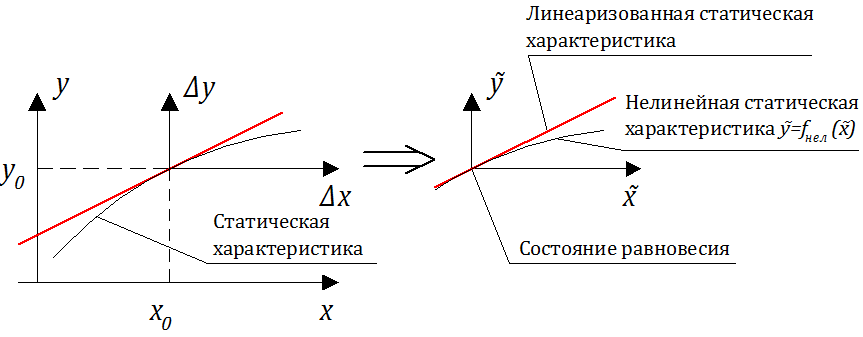
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
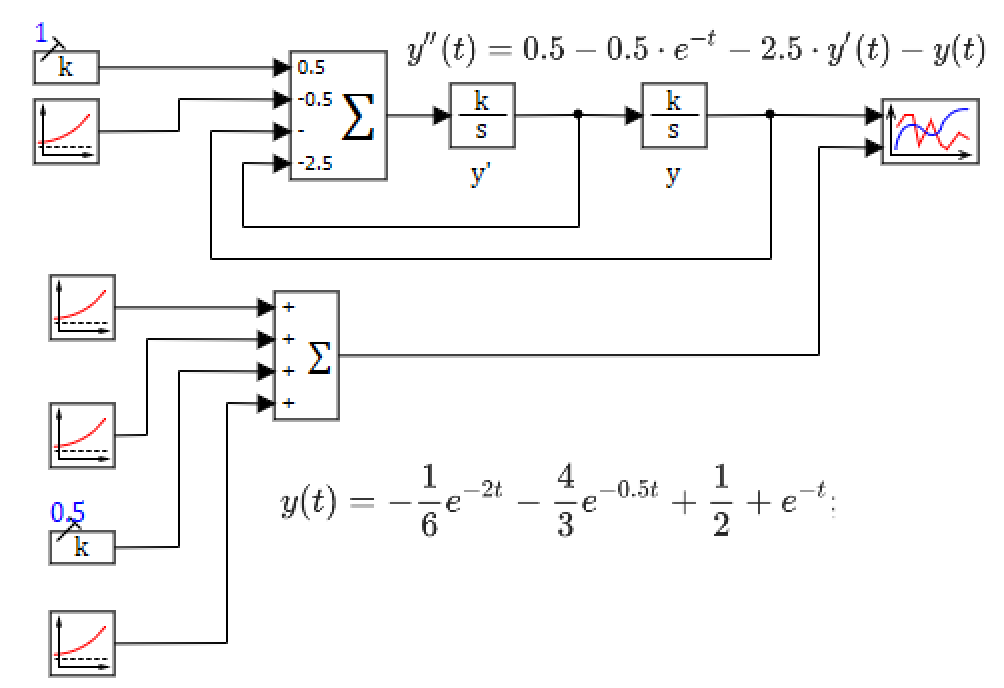
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
http://habr.com/ru/post/506984/