Силовой баланс автомобиля
Из уравнения движения автомобиля (см. формулу 4.3) следует, что при прямолинейном движении автомобиля на подъем тяговая сила на ведущих колесах автомобиля расходуется на преодоление сил сопротивления дороги, воздуха и на его разгон:
 | (4.7) |
Такая форма записи называется уравнением силового баланса автомобиля и выражает соотношение между тяговой силой на ведущих колесах и силами сопротивления движению.
На основании уравнения (4.7) строится график силового баланса (рис.4.2), позволяющий оценивать тягово-скоростные свойства автомобиля.
При построении графика силового баланса сначала строится тяговая характеристика автомобиля. Затем наносят зависимость силы сопротивления дороги от скорости. Если коэффициент сопротивления дороги – постоянная величина, то указанная зависимость представляет собой прямую линию, параллельную оси абсцисс, а при непостоянном коэффициенте сопротивления дороги – кривую параболической формы.
После этого от кривой, характеризующей силу сопротивления дороги, откладывают вверх значения силы сопротивления воздуха при различных скоростях движения.
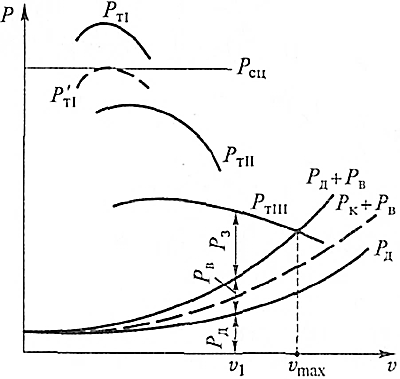
РтI, РтII, РтIII, — тяговые силы на I,II,III передачах,
Р ‘ тI – тяговая сила на I передаче при уменьшенной подаче топлива;
v1— одно из возможных значений скорости автомобиля.
Рисунок 4.2 – График силового баланса автомобиля
Кривая суммарного сопротивления дороги и воздуха Pд + Рв определяет тяговую силу Pт, необходимую для движения автомобиля с постоянной скоростью. При любой скорости движения отрезок Pз, заключенный между кривыми Pт и (Pд + Рв ), характеризует запас силы по тяге. Этот запас может быть использован при данной скорости для разгона, преодоления дополнительного дорожного сопротивления (например, подъема) или перевозки дополнительного груза (буксировка прицепа).
Запас силы по тяге на низших передачах больше, чем на высших. Именно поэтому движение в тяжелых дорожных условиях осуществляется на низших передачах.
С помощью графика силового баланса можно решать различные задачи по оценке тягово-скоростных свойств автомобиля: определение максимальной скорости, определение максимальной силы сопротивления дороги, определение максимального преодолеваемого подъема, определение ускорения движения, определение возможности буксования ведущих колес.
Максимальная скорость vmax движения автомобиля определяется точкой пересечения кривой тяговой силы Ρт на высшей передаче и суммарной кривой сил сопротивления Рд + Рв. В этой точке запас силы по тяге и ускорение автомобиля j равны нулю, а скорость движения максимальна, так как ее дальнейшее увеличение невозможно.
Максимальная сила сопротивления дороги, преодолеваемая автомобилем при движении равномерно с любой скоростью, определяется как: Pд max = Pт – Рв = Pд + Pз.
Для нахождения максимального подъема, преодолеваемого автомобилем при постоянной скорости на любой передаче, необходимо нанести на график суммарную кривую сил сопротивления качению и воздуха Рк + Pв и определить максимальную силу сопротивления подъему: Рп max=Pт – (Рк +Pв).
Зная эту силу, можно найти максимальный угол подъема αmax.
Для нахождения ускорения, которое может развить автомобиль на заданной дороге при любой скорости, нужно определить силу сопротивления разгону Ри = Pт – (Рд + Pв) = Рз, а затем можно найти ускорение, которое способен развить автомобиль при выбранной скорости движения
Для оценки возможности буксования находят силу сцепления Рсц колес с дорогой при известном коэффициенте φх и значение силы сцепления откладывают на оси ординат, а на этом уровне проводят горизонталь.
При Рсц Рт (область ниже Рсц) выполняется условие отсутствия буксования. Следовательно, при полной нагрузке двигателя безостановочное движение автомобиля без пробуксовки ведущих колес невозможно лишь на I передаче. Для движения без буксования на I передаче необходимо уменьшить подачу топлива, т.е. – тяговую силу на ведущих колесах.
Уравнение силового баланса
8.1. Силовой баланс автомобиля
8.2. Силовой баланс автомобиля при различной нагрузке
8.3. Динамические факторы автомобиля
8.4. Динамическая характеристика автомобиля
8.5. Динамический паспорт автомобиля
8.1. Силовой баланс автомобиля
Представим уравнение движения автомобиля в следующем виде:
Рекомендуемые файлы
В такой форме оно называется уравнением силового баланса автомобиля и выражает соотношение между тяговой силой на ведущих колесах и силами сопротивления движению.
На основании уравнения (8. 1) строится график силового баланса, позволяющий оценивать тягово-скоростные свойства автомобиля.
При построении графика силового баланса (рис. 8.1) сначала строят тяговую характеристику автомобиля. Затем наносят зависимость силы сопротивления дороги от скорости. Если коэффициент сопротивления дороги — постоянная величина, то указанная зависимость представляет собой прямую линию, параллельную оси абсцисс, а при непостоянном коэффициенте сопротивления дороги — кривую параболической формы. После этого от кривой, характеризующей силу сопротивления дороги, откладывают вверх значения силы сопротивления воздуха при различных скоростях движения. Полученная зависимость называется графиком силового баланса автомобиля.
Кривая суммарного сопротивления дороги и воздуха РД + РВ определяет тяговую силу РТ, необходимую для движения автомобиля с постоянной скоростью. При любой скорости движения отрезок Р3, заключенный между кривыми РТ (на рис. 8.1 — РтШ) и РД + РВ, характеризует запас силы по тяге. Он может быть использован при данной скорости для разгона, преодоления дополнительного дорожного сопротивления (например, подъема) или перевозки дополнительного груза (буксировка прицепа). При одной и той же скорости движения запас силы по тяге на низших передачах больше, чем на высших. Следовательно, при увеличении передаточного числа трансмиссии запас силы по тяге возрастает. Именно поэтому движение в тяжелых дорожных условиях осуществляется на низших передачах.

Рис. 8.1. График силового баланса автомобиля:
•PTI, РТII, РТIII — тяговые силы на I, II, III передачах, PTI — тяговая сила на I передаче при уменьшенной подаче топлива; v1, — одно из возможных значений скорости автомобиля
С помощью графика силового баланса можно решать различные задачи, связанные с изучением тягово-скоростных свойств автомобиля. Рассмотрим некоторые из этих задач.
Определение максимальной скорости. Максимальная скорость vmax движения автомобиля определяется точкой пересечения кривой тяговой силы РТ на высшей передаче и суммарной кривой сил сопротивления РД + РВ. В этой точке запас силы по тяге и ускорение автомобиля j равны нулю. Скорость его движения максимальна, так как ее дальнейшее увеличение невозможно.
Определение максимальной силы сопротивления дороги.
Максимальная сила сопротивления дороги, которую преодолевает автомобиль, двигаясь равномерно с любой скоростью, определяется как разность тяговой силы и силы сопротивления воздуха:

Определение максимального преодолеваемого подъема.
Для нахождения максимального подъема, который может преодолеть автомобиль при заданной постоянной скорости на любой передаче, необходимо нанести на график суммарную кривую сил сопротивления качению и воздуха РK + РВ и определить максимальную силу сопротивления подъему:

Зная эту силу, можно найти максимальный угол подъема αmах.
Определение ускорения движения. Для нахождения ускорения, которое может развить автомобиль на заданной дороге при любой скорости, нужно определить силу сопротивления разгону:

Зная значение этой силы, можно найти ускорение, которое способен развить автомобиль при выбранной скорости движения на заданной дороге.
Определение возможности буксования ведущих колес. С этой целью находят силу сцепления Рсц колес с дорогой при известном коэффициенте сцепления РТ. Следовательно, при полной нагрузке двигателя (при полной подаче топлива) безостановочное движение автомобиля без пробуксовки ведущих колес невозможно лишь на I передаче. Для движения без буксования ведущих колес на I передаче необходимо уменьшить подачу топлива и, следовательно, тяговую силу на ведущих колесах (см. кривую Р’T1 на рис. 8.1).
8.2. Силовой баланс автомобиля при различной нагрузке
Практическое применение рассмотренного выше силового баланса автомобиля затруднительно, так как для определения показателей тягово-скоростных свойств необходимо построить отдельные графики для разных значений нагрузки на автомобиль. Это связано с тем, что при изменении нагрузки сила сопротивления дороги РД и суммарная сила сопротивления дороги и воздуха РД + РВв изменяются и для их вычисления требуются дополнительные затраты времени.
Более универсальным является рассмотренный ниже метод силового баланса автомобиля при различной нагрузке. В этом случае строится только один график силового баланса для всех эксплуатационных нагрузок автомобиля.
В основу метода силового баланса автомобиля при различной нагрузке положено уравнение его движения (8.20), представленное в следующем виде:


где  — свободная тяговая сила.
— свободная тяговая сила.
Безостановочное движение автомобиля возможно при выполнении условия автомобиль движется без буксования ведущих колес в том случае, если
автомобиль движется без буксования ведущих колес в том случае, если
Для оценки тягово-скоростных свойств при различной нагрузке на автомобиль строится график его силового баланса (рис. 8.2).
Методика построения графика силового баланса такова:
• строят тяговую характеристику автомобиля 
• на график тяговой характеристики наносят кривые свободной тяговой силы Рсв для различных передач;
• слева от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сопротивления дороги ψ. С этой целью ось абсцисс продолжают влево и на нее в произвольном масштабе наносят шкалу коэффициента сопротивления дороги ψ;
• справа от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сцепления колес с дорогой φх. Для этого ось абсцисс продолжают вправо и на нее в произвольном масштабе наносят шкалу коэффициента сцепления φх;
• из начала координат вспомогательных графиков проводят лучи, соответствующие различным значениям нагрузки на автомобиль.

Рис. 8.2. График силового баланса автомобиля при различной
I — IV — передачи; O1 — начало координат левого и центрального графиков; О2 — начало координат правого графика; ψ1— ψ3, ψx1 ,— ψ хз — значения коэффициентов сопротивления и продольного сцепления различных дорог; vt — v3 — значения скорости автомобиля;———-тяговая сила РТ;———-свободная тяговая сила РСВ
Для определения углов наклона лучей нагрузки на левом вспомогательном графике задают какое-либо значение свободной тяговой силы Рсв, откладывают это значение на оси ординат и проводят горизонтальную прямую. Затем по формуле

находят значения коэффициента у для разных нагрузок (Н = 0 % при G = G0;
Н = 100 % при G = G а и т.д., где G — вес автомобиля при заданной нагрузке Н, представляющей собой долю груза, %, который может быть перевезен на данном автомобиле; G0 — вес снаряженного (порожнего) автомобиля; Gа, — вес автомобиля при полной нагрузке). Из точек, соответствующих найденным значениям коэффициента у, проводят вертикали до пересечения с горизонтальной линией, проходящей через точку, отвечающую выбранному значению свободной тяговой силы Рсв. Полученные точки пересечения соединяют с началом координат левого вспомогательного графика и у каждого луча указывают соответствующее значение нагрузки на автомобиль, % или пасс.
Для определения углов наклона лучей нагрузки на автомобиль на правом вспомогательном графике задают какое-либо значение тяговой силы РТ, откладывают это значение на оси ординат и проводят горизонтальную линию. Затем по формуле

находят значения коэффициента сцепления для разных нагрузок (Н = 0 % при — максимальная скорость автомобиля для конкретных дорожных условий
Так, например, точка Dv, соответствующая значению динамического фактора при максимальной скорости vmах, определяет коэффициент сопротивления дороги ψv, которое может преодолеть автомобиль при этой скорости, а ординаты точек максимума кривых динамического фактора представляют собой максимальные значения коэффициента сопротивления дороги, преодолеваемого на каждой передаче.
С помощью динамической характеристики можно решать различные задачи по определению тягово-скоростных свойств автомобиля. Рассмотрим некоторые из этих задач.
Определение максимальной скорости движения автомобиля при заданном коэффициенте сопротивления дороги у. На оси ординат откладываем значение коэффициента сопротивления дороги ψ, характеризующее данную дорогу, и проводим прямую, параллельную оси абсцисс, до пересечения с кривой динамического фактора D. Точка пересечения и будет соответствовать максимальной скорости, которую может развить автомобиль при заданном коэффициенте сопротивления дороги ψ.
Определение максимального подъема, преодолеваемого на дороге с заданным коэффициентом сопротивления качению f Для нахождения максимального подъема, который может преодолеть автомобиль при постоянной скорости на любой передаче на дороге с коэффициентом сопротивления качению f на оси ординат откладываем значение коэффициента f и проводим прямую, параллельную оси абсцисс. Разность между максимальным значением динамического фактора Dmax на любой передаче и значением коэффициента f соответствует максимальному подъему, преодолеваемому на выбранной передаче:

Определение максимального ускорения автомобиля при заданном коэффициенте сопротивления дороги у. Для нахождения максимального ускорения jmax, которое может развить автомобиль на любой передаче, необходимо найти разность между максимальным значением динамического фактора на выбранной передаче и
значением коэффициента сопротивления дороги (Dmax — ψ). Зная эту разность, можно определить значение максимального ускорения по формуле (8. 2)

Определение возможности буксования ведущих колес. При решении данной задачи необходимо сопоставить динамические факторы по тяге и сцеплению. С этой целью определяют значение динамического фактора по сцеплению для заданного коэффициента сцепления φх. Найденное значение откладывают на оси ординат и проводят горизонтальную прямую.
В области, расположенной над проведенной прямой, Dcц _______ динамический фактор по тяге при разных нагрузках;———-динамический фактор по сцеплению при разных коэффициентах продольного сцепления
При построении номограммы нагрузок на автомобиль ось абсцисс его динамической характеристики продолжают влево и на ней в произвольном масштабе откладывают значения нагрузки на автомобиль, % (для грузовых автомобилей) или пасс, (для легковых автомобилей и автобусов). Из точки, соответствующей нулевой нагрузке, проводят вертикаль, на которой откладывают значения динамического фактора по тяге D0 для снаряженного автомобиля (без груза или без пассажиров) в масштабе, определяемом по формуле — динамический фактор по тяге для автомобиля с полной нагрузкой;
— динамический фактор по тяге для автомобиля с полной нагрузкой; — вес соответственно снаряженного автомобиля и автомобиля с полной нагрузкой.
— вес соответственно снаряженного автомобиля и автомобиля с полной нагрузкой.
Затем сплошными линиями соединяют одинаковые значения динамических факторов на осях ординат снаряженного и полностью груженого автомобилей.
на осях ординат снаряженного и полностью груженого автомобилей.
График контроля буксования строят на номограмме нагрузок автомобиля. С помощью этого графика сопоставляют динамические факторы по тяге D и сцеплению D.cц с целью определения возможности буксования ведущих колес при различных нагрузках на автомобиль.
Лекция «15 Свойства вероятности» также может быть Вам полезна.
Для построения графика контроля буксования сначала рассчитывают динамические факторы по сцеплению при разных нагрузках на автомобиль. При этом используют следующие выражения:
 (8.3)
(8.3)
где D0cц и Dаcц — динамические факторы по сцеплению соответственно снаряженного автомобиля и автомобиля с полной нагрузкой; — вес соответственно снаряженного и полностью груженого автомобилей;
— вес соответственно снаряженного и полностью груженого автомобилей; — вес, приходящийся на ведущие колеса соответственно снаряженного и полностью груженого автомобилей;
— вес, приходящийся на ведущие колеса соответственно снаряженного и полностью груженого автомобилей;
φх — коэффициент продольного сцепления (φх = 0,1. 0,8).
Последовательно подставляя значения коэффициента сцепления φх в выражения (8.3), определяют динамические факторы по сцеплению D0cц и Dаcц Найденные значения динамических факторов по сцеплению откладывают на вертикалях D0 и Dа номограммы нагрузок в том же масштабе, что и динамические факторы по тяге, и их одинаковые значения соединяют штриховыми линиями, над которыми указывают соответствующие значения φх.
При решении задач по оценке тягово-скоростных свойств автомобиля из четырех параметров — скорости автомобиля v, нагрузки на автомобиль Н, коэффициентов сопротивления дороги ψ и сцепления колес с дорогой φх — можно определить два любых параметра по двум другим заданным. При этом найденные значения коэффициента сопротивления дороги ψ будут максимально возможными, а значения коэффициента сцепления φх — минимально необходимыми для движения автомобиля при различных нагрузках.
Как составить силовые уравнения
В задачах динамики учитывают силы, действующие на тело. Векторы сил могут действовать в различных направлениях. Большинство школьных задач можно решить, располагая векторы сил в одной плоскости. Поэтому, в статье будем рассматривать векторы, лежащие в одной плоскости — компланарные векторы.
Что такое равнодействующая
Равнодействующий вектор – это вектор, который мы получаем, когда складываем несколько векторов сил.
Результат сложения может дать:
- вектор, имеющий длину,
- или вектор, не имеющий длины.
Примечание: Когда у вектора отсутствует длина, говорят, что вектор равен нулю. На рисунке нулевой вектор можно изобразить одной точкой. Длины у точки нет – т. е. длина нулевая, а направление может быть любым.
Длина вектора содержит сумму квадратов всех его проекций на оси.
Где \( a_
Когда вектор равен нулю, равна нулю каждая его проекция на осях.
Длина вектора отлична от нуля, когда хотя бы одна его проекция ненулевая.
Левая часть силового уравнения
В левой части силового уравнения записываем силы, действующие на тело.
Когда векторы сил направлены вдоль параллельных прямых, проводим на рисунке одну ось. Если векторы сил не параллельные, проводим две оси на плоскости. Раскладываем векторы на проекции по осям. Для каждой оси составляем отдельное уравнение. Количество уравнений совпадает с количеством осей.
Если сила сонаправлена с осью, то она войдет в левую часть уравнения со знаком «+», а если она направлена против оси — то со знаком «минус».
Правая часть силового уравнения
В правой части уравнения записываем равнодействующую. В задаче может присутствовать несколько осей, вдоль каждой оси направляем отдельную проекцию равнодействующей.
Примечание: Тело может вдоль одной оси двигаться с ускорением, а вдоль другой оси двигаться без ускорения, или, вообще, покоиться. Например, тело может двигаться по вертикали под действием силы тяжести, а по горизонтали при этом не смещаться.
Когда проекция равнодействующей вдоль какой-либо оси не равна нулю, тело по оси будет двигаться с ускорением. Это следует из второго закона Ньютона.
Тогда в правой части уравнения запишем:
- \(ma\), если ускорение направлено туда же, куда направлена ось;
- \(- ma\), если ускорение направлено противоположно оси;
А когда проекция равнодействующей на ось нулевая, ускорение вдоль оси отсутствует. Тогда вдоль этой оси тело движется с неизменной скоростью, или же, вдоль этой оси движение отсутствует. Это следует из первого закона Ньютона.
В правой части уравнения запишем ноль (0 = ускорения нет).
Векторы сил параллельны
В случае, когда векторы направлены вдоль одной прямой, достаточно выбрать и провести единственную ось.
Выясним, как выглядит силовое уравнение для задачи, в которой векторы сил направлены вдоль единственной оси. Например, парашютист спускается вертикально вниз (рис. 1) на парашюте под действием силы тяжести.

Проведем на рисунке ось, направим ее вверх.
Примечание: Мы можем направить ось вниз, если захотим. При таком направлении оси знаки проекций векторов изменятся на противоположные, но на конечный ответ это никак не повлияет.
Составим левую часть уравнения. В левой части мы запишем силы, действующие на парашютиста:
Сила \( F_<\text<сопр>>\) направлена по оси, поэтому войдет в уравнение со знаком «+». А сила \( m \cdot g \) вошла в уравнение со знаком «минус», так как направлена против оси.
В правую часть уравнения поместим равнодействующую.
Размеры парашюта рассчитаны так, что парашютист опускается вниз с постоянной (неизменной, т. е. одной и той же) скоростью. Значит, скорость есть, она не меняется, ускорения нет.
Математики запишут, что ускорение есть, но оно – нулевое \(\vec=0\).
То есть, вдоль вертикальной оси тело движется без ускорения, значит, силы компенсировались. По первому закону Ньютона, равнодействующая равна нулю и, в правой части уравнения запишем ноль.
Примечания:
- На рисунке 1 скорость обозначена красным вектором, направленным вниз и обозначенным, как \(\vec
- На рисунке векторы скоростей и ускорений нужно рисовать отдельно от векторов сил! Решая задачу, мы будем складывать векторы (ссылка), имеющие одинаковую размерность. Силы измеряют в Ньютонах, поэтому их можно складывать. А ускорения и скорости измеряют в других единицах, с Ньютонами их сложить не получится. Именно поэтому, чтобы не запутаться, ускорения и скорости рисуем на небольшом расстоянии от тела, отдельно от векторов сил.
Итоговое силовое уравнение имеет вид:
\[\large F_<\text<сопр>> — m \cdot g = 0 \]
Зная массу парашютиста, можно вычислить силу сопротивления воздуха. А зная эту силу, можно рассчитать и размеры парашюта.
Векторы сил не параллельны
Когда векторы направлены вдоль разных прямых, будем проводить две взаимно перпендикулярные оси на плоскости.
Разберем задачу равнозамедленного движения тела по горизонтальной шероховатой поверхности (рис. 2).

Поверхность шероховатая, это намек на то, что есть сила трения. А если в условии напишут, что поверхность гладкая, значит, силы трения нет.
Движение равнозамедленное (ссылка), значит, скорость тела уменьшается и есть вектор ускорения, который направлен против вектора скорости.
Нарисуем взаимно перпендикулярные оси. Ось Ox проведем горизонтально, а ось Oy – вертикально. Рассмотрим оси и проекции векторов на них по очереди.
Горизонтальная ось. Пусть движение тела происходит в положительном направлении оси Ox. Сила трения всегда направлена против движения, поэтому направим ее влево. Скорость тела направлена вправо и будет уменьшаться, значит, ускорение, так же, направим влево. Вектор ускорения рисуем отдельно от векторов сил.
Наличие ускорения говорит о том, что вдоль оси Ox равнодействующая имеет не нулевую проекцию. Ускорение направлено против оси, запишем \(- ma\) в правой части уравнения.
Так выглядит уравнение для горизонтальной оси
Вертикальная ось. Вниз направлена сила тяжести, а вверх – сила реакции опоры. Так как поверхность горизонтальная и тело не движется ни вверх, ни вниз, то движения вдоль оси Oy нет. Значит, сила тяжести и реакция опоры компенсировались и нет ускорения вдоль оси Oy. В правой части уравнения для вертикальной оси запишем ноль.
Для вертикальной оси уравнение выглядит так:
\[\large N — m \cdot g = 0 \]
Система, пригодная для решения задачи, состоит из двух уравнений
Куда направить оси
Разберем равнозамедленное движение тела вверх по наклонной шероховатой плоскости (рис. 3).
Силы, действующие на тело в этой задаче, не параллельные, направлены вдоль разных прямых. Поэтому для составления уравнений нужно использовать две взаимно перпендикулярные оси. Попробуем для начала провести ось Oy вертикально, а ось Ox горизонтально.

Из рисунка 3 видно, вдоль оси направлен только один вектор \(mg\). Остальные векторы сил не параллельны ни одной из осей. Такие векторы придется раскладывать на проекции, это усложнит конечную систему уравнений.
Если выберем оси так, как показано на рисунке 3, на проекции нужно будет разложить три вектора.
Попробуем теперь провести оси так, чтобы как можно большее количество векторов оказались параллельными осям (рис. 4). Из рисунка видно, что только один вектор \(mg\) окажется ненаправленным вдоль какой-либо оси. Остальные векторы сил параллельны осям.

При таком выборе осей раскладывать на проекции придется только один вектор. Это позволит быстрее решить задачу и решать более простые уравнения.
Примечание: Если мы выбререм оси так, как это представлено на рисунке 3, получим более сложные уравнения. Но решив их, мы получим точно такой же ответ, как и в случае выбора осей на рисунке 4.
Выводы:
- Выбор осей на конечный результат не влияет! А влияет только на сложность полученных уравнений.
- Оси проводим так, чтобы как можно больше векторов оказались направленными вдоль осей.
Движение по наклонной плоскости
Составим систему уравнений для решения такой задачи:
Велосипедист подъезжает с начальной скоростью к подъему, посыпанному песком и, едет в гору на велосипеде по инерции, не крутя педали. Масса велосипедиста с велосипедом, начальная скорость его, коэффициент сопротивления поверхности и угол наклона известны.
Нужно составить систему силовых уравнений, чтобы найти ускорение велосипедиста. А после, зная начальную скорость и ускорение, найти путь, который велосипедист сможет проехать по инерции в горку.
Выражение для ускорения
Составим рисунок, на котором изобразим силы, действующие на велосипедиста (рис. 5)

Мы провели оси так, чтобы пришлось разложить на проекции только один вектор и система силовых уравнений оказалась достаточно простой.
Пользуясь осями координат, составляем теперь уравнения в проекциях.
Уравнение для проекций векторов на ось Ox:
\[ \large — F_<\text<трен>> – m \cdot g_
Уравнение для проекций векторов на ось Oy:
\[ \large N – m \cdot g_
Разложим теперь силу тяжести — вектор \(mg\) на проекции. Чтобы проделать это разложение, нужно отметить угол \(\alpha \) межу вектором \(mg\) и одной из осей. В нашем случае, это угол между вектором \(mg\) и осью Oy.
\[ \large \begin
Подставив разложение вектора \(mg\) в уравнения для осей, получим такую систему уравнений
\[ \large \begin
Дополним эту систему выражением для силы трения.
Запишем эти уравнения в систему и выразим из нее уравнение для ускорения.
\[ \large \begin
Поделим нижнее уравнение системы на массу велосипедиста и запишем окончательно уравнение для ускорения:
\[ \large \mu \cdot g \cdot cos \left(\alpha \right) + g \cdot sin \left(\alpha \right) = a \]
Выражение для пройденного пути
Запишем выражения для связи скоростей и пройденного пути. Велосипедист движется по инерции в гору и его скорость уменьшается из-за силы тяжести и силы сопротивления поверхности, посыпанной песком. Когда скорость велосипедиста обратится в ноль, он, проехав часть пути в гору, остановится. Используем систему двух уравнений, она описывает путь при учете уменьшения скорости до нуля:
\[ \large \begin
Получим теперь уравнение для пути, в котором будут присутствовать только начальная скорость и ускорение и, будет отсутствовать время.
Упрощенная система для решения задачи теперь включает всего два уравнения
\[ \large \begin
Подставив в эту систему известные значения начальной \(v_<0>\) скорости велосипедиста, коэффициент \(\mu\) сопротивления поверхности и угол \(\alpha\) наклона плоскости, сможем посчитать путь, пройденный велосипедистом до его полной остановки.
http://studizba.com/lectures/129-inzhenerija/1815-avtomobili/35557-9-uravnenie-silovogo-balansa.html
http://formulki.ru/mehanika/kak-sostavit-silovye-uravneniya