Реферат: Метод Винера-Хопфа и его приложения в физических задачах
Название: Метод Винера-Хопфа и его приложения в физических задачах Раздел: Рефераты по математике Тип: реферат Добавлен 10:55:50 23 мая 2010 Похожие работы Просмотров: 96 Комментариев: 20 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать
Метод Винера-Хопфа и его приложения в физических задачах.
Демидов Р.А. ,ФТФ, 2105
Указанный метод подходит для решения интегральных уравнений на полубесконечном промежутке с ядром, зависящим от разности аргументов – речь идет об уравнениях вида
.
Этот метод был предложен в совместной работе Н.Винера и Э.Хопфа в 1931 году, и находит разнообразные применения в теории дифференциальных и интегральных уравнений, а также в их приложениях в физических задачах.
В своей работе я опишу сам метод Винера-Хопфа, а также приведу его применение к решению краевых задач матфизики.
1.1 Случай бесконечного промежутка
Метод Винера-Хопфа основан на специальном виде ядра интегрального уравнения – оно зависит от разности аргументов, а не от самого аргумента. Собственно, для начала рассмотрим уравнение вида
(1)
— это уравнение с бесконечным промежутком и тем же самым ядром. Решение его существует ,если выполняются 2 условия:
,
а также условие сходимости нормы u(x):
.
Эти условия работают при действительных λ. Мы рассмотрим два способа решения этого уравнения – один, использующий свойство свертки напрямую, другой – с помощью резольвенты. Итак,первый .Заметим, что в случае именно бесконечного промежутка интеграл представляет собой свертку ядра и функции u(x). Вспомнив,что Фурье-образы функций u(x),f(x),g(x) выглядят как, воспользуемся свойством образа свертки двух функций – “образ свертки есть свертка образов”. Тогда для функций U(k),V(k),F(k) – образов соответствующих функций, получаем алгебраическое уравнение:
(2)
Данное свойство образа свертки доказывается “в лоб”, а именно – домножением равенства (1) на и интегрированием по всей действительной оси:
Делая замену во втором интеграле (x-s)=t, получаем
,
что и требовалось доказать.
Видим, что мы свели исходную задачу к алгебраическому уравнению относительно образа исходной функции u(x). Выражая его через образы ядра и f(x),производя обратное преобразование Фурье, получаем в качестве искомого решения:
=>
=> (3)
Второй способ: вычисляем резольвенту уравнения как
(4)
В виде Фурье — образов это равенство выглядит так:
,
где G(k) вычисляется как
(5)
V(k) – Фурье-образ исходного ядра v(x) уравнения (1).То есть для решения исходного уравнения необходимо найти функцию g(x),применив обратное преобразование Фурье к (5),и подставить его в (4). Этот способ не требует вычисления каждый раз интегралов для F(k) при смене функции f,она подставляется в самом конце один раз, поэтому такой способ быстрее.
На примере этой задачи мы поняли, как решать уравнение с бесконечным промежутком интегрирования. На этом примере мы будем строить решение уравнения с полубесконечным промежутком – и опишем метод Винера-Хопфа.
1.2 Полубесконечный промежуток
Понятно, что в случае, если интегрирование идет не с -∞, а с 0, переходя к образам, мы не можем воспринимать наш интеграл как свертку – а значит, и не можем написать наше уравнение. Запишем некоторые свойства преобразования Фурье, связанные с полубесконечными промежутками, которые нам понадобятся в дальнейшем. Итак, в случае разбиения функции f (x) на два куска – f+ (x) и f— (x), (f(x)= f+ (x) + f— (x) )представляющих собой правый и левый концы следующим образом:
выражения для прямых и обратных преобразований Фурье для них будет выглядеть так:
f+ : ,
при причем здесь — комплексная переменная, и выполняется неравенство Im(k)=τ > τ— . Причем
Обратное преобразование выглядит так:
,
и здесь мы интегрируем по любой прямой Im(k)=τ > τ— .
f— : При
для прямого преобразования Фурье имеем
,
к здесь та же к.п. ,это верно в области с Im(k)=τ 0 функция полоса Im(τ)=0 попадает в границы интегрирования, и интеграл можно взять вещественным, выбрав мнимую часть τ нулем.
Применим эти соображения к решению искомого уравнения. (6)
(6)
Разложим неизвестную функцию u(x) на составляющие u+ , u— :
При подстановке этих функций в уравнение (6) мы получаем два уравнения на каждую часть u(x).Факт существование решения мы примем без доказательств. Мы ищем решения, удовлетворяющие следующим условиям:
,
µ n , то функции можем считать определенными, и приравнять правую и левую часть в общем случае многочлену Pn (k) (это получается, если учесть стремление U+ ,U— к нулю по |к|-> ∞.Теперь у нас неопределенности нет, и в общем виде это выглядит так:
Если степень роста функций L есть единица(растут не быстрее линейной функции),то мы имеем для кусков функции L(k) следующее:
,
и в итоговом решении будет присутствовать произвольная константа C.Приведу пример последнего случая с n=0. Пример.
— интегральное уравнение с полубесконечным промежутком и нулевой f для простоты. Решим его м.В.-Х.
Как видим, мы имеем дело с ядром вида exp(-|x|).Найдем его Фурье-образ, и далее, функцию L(k):
— является аналитической в области -1 0.5 условия выполняются в полосе 0 τ— , L— аналитическая в области Im(k) ∞ Тогда в этой полосе возможно разбиение функции F как ,F+ (k) аналитическая в Im(k)>τ— , F— (k) аналитическая в Im(k) ∞,и устремим контур к полосе.
Тогда в пределе получаем
,
где эти части есть
Каждая функция задана в своей области, а на их пересечении в нашей полосе мы имеем равенство. Что и требовалось доказать, в общем то. Очевидно, что из их сходимости следует и ограниченность F+ (k),F— (k) в рассматриваемой полосе.
Лемма2: Пусть функция Ф(k) является аналитической и не равной нулю в полосе ,причем Ф(k) равномерно стремится к 1 при |k|->∞.Тогда ,где функции Ф+ ,Ф— соответственно аналитические в
и
Заметим, что для функции выполнены условия леммы1,значит,мы имеем право ее представить суммой F+ , F— , а Ф – произведением:
,Ф=Ф+ *Ф— .
Условия на границы по мнимой оси для функций Ф+ ,Ф— сохранятся => лемма доказана.
Теперь сделаем еще одно обобщение – покажем, как в общих чертах работает этот метод для неоднородного уравнения
(7)
Проводя аналогичные рассуждения, разбивая u(x) на две вспомогательные функции, замечаем, что при выполнении условий для модуля
в полосе мы можем переходить к образам функций и мы получим
предварительно разбив F на две. Принимая за функцию L(x) ф-ю
,
аналитическую в стандартной полосе и равномерно стремящуюся к 1 при наше алгебраическое уравнение перепишется как
Далее, точно также разделяем L на две части как
,
И L+ — аналитическая в , L— — аналитическая в . По аналогии приводя к общему знаменателю, получаем уравнение на U+ ,U— :
При успешном разложении последнего члена как
,
где по все той же аналогии D+ и D— аналитические в областях соответственно, мы записываем решения в виде
.
При этом мы воспользовались той же сходимостью – L+ ,L— растут не быстрее чем k n , а значит, для выполнения условий необходим полином в числителе.
Как видим, и эта, неоднородная задача, успешно решилась методом Винера-Хопфа. Как таковой, метод основан на некой аналогии разделения переменных – мы разделяем одну функцию на сумму двух, каждая из которых закрывает свою зону комплексной плоскости, и с каждой половиной работаем отдельно.
Метод мы рассмотрели, поняли, как он работает, теперь рассмотрим его конкретное применение – в краевых задачах математической физики.
2. Применение метода Винера-Хопфа
До этого мы рассматривали наш метод для решения интегральных уравнений, однородных и неоднородных, с специальным ядром. Сейчас же рассмотрим уравнение Лапласа и краевую задачу на нем, тем самым обобщив м. В.-Х. и на дифференциальные уравнения в частных производных.
Итак, задача: в верхней полуплоскости найти гармоническую функцию, удовлетворяющую следующим условиям:
Для этого решим к. задачу на уравнении , ,и перейдем уже в решении к пределу в нуле по каппа.
Разделяя переменные, и применяя метод Фурье, в общем виде находим решение:
,
где f(k) — произвольная функция комплексного параметра k,
Для удовлетворения функции u граничным условиям должны выполняться 2 условия на f(очевидно из представления u):
Решение строится, если L(k) аналитическая в полосе τ— 0. Тогда
,
Оптимальная линейная фильтрация: от метода градиентного спуска до адаптивных фильтров
Развивая тему конспектов по магистерской специальности «Communication and Signal Processing» (TU Ilmenau), продолжить хотелось бы одной из основных тем курса «Adaptive and Array Signal Processing». А именно основами адаптивной фильтрации.
Для кого в первую очередь была написана эта статья:
1) для студенческой братии родной специальности; 2) для преподавателей, которые готовят практические семинары, но ещё не определились с инструментарием — ниже будут примеры на python и Matlab/Octave; 3) для всех, кто интересуется темой фильтрации.
Что можно найти под катом:
1) сведения из теории, которые я постарался оформить максимально сжато, но, как мне кажется, информативно; 2) примеры применения фильтров: в частности, в рамках эквалайзера для антенной решетки; 3) ссылки на базисную литературу и открытые библиотеки (на python), которые могут быть полезны для исследований.
В общем, добро пожаловать и давайте разбирать всё по пунктам.
Задумчивый человек на фото — знакомый многим, я думаю, Норберт Винер. Фильтр его имени мы, по большей части, и будем изучать. Однако, нельзя не упомянуть и о нашем соотечественнике — Андрее Николаевиче Колмогорове, чья статья 1941 года также внесла значительный вклад в развитие теории оптимальной фильтрации, которая даже в англоязычных источниках так и называется Kolmogorov-Wiener filtering theory.
Что рассматриваем?
Сегодня мы рассматриваем классический фильтр с конечной импульсной характеристикой (КИХ, FIR — finite impulse response), описать который можно следующей простой схемой (рис. 1).
Рис.1. Схема КИХ-фильтра для изучения фильтра Винера.[1. c.117]
Запишем в матричном виде, что именно будет на выходе данного стенда:
— это разница (ошибка) между заданным и полученным сигналами
— это некоторый предварительно заданный сигнал (desired signal)
— это вектор отсчетов или, иными словами, сигнал на входе фильтра
— это сигнал на выходе фильтра
— это эрмитово сопряжение вектора коэффициентов фильтра — именно в их оптимальном подборе и кроется адаптивность фильтра
Наверное вы уже догадались, что стремиться мы будем к наименьшей разнице между заданным и отфильтрованным сигналом, то есть к наименьшей ошибке. А значит перед нами вырисовывается оптимизационная задача.
Что будем оптимизировать?
Оптимизировать, а точнее минимизировать мы будем не просто ошибку, среднюю квадратичную ошибку (MSE — Mean Sqared Error):
где обозначает функцию издержек (cost function) от вектора коэффициентов фильтра, а обозначает мат. ожидание.
Квадрат в данном случае очень приятен, так как он означает, что перед нами задача выпуклого программирования (я нагуглил только такой аналог английскому convex optimization), что, в свою очередь, подразумевает единственный экстремум (в нашем случае минимум).
У нашей функции ошибки есть каноническая форма [1, c.121]:
где — это дисперсия ожидаемого сигнала, — это вектор кросс-корреляции между входным вектором и ожидаемым сигналом, а — это матрица автокорреляции входного сигнала.
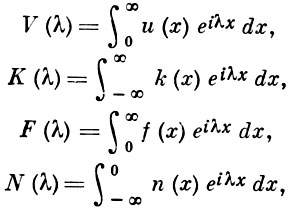
Как мы уже отметили выше, если мы ведем речь о выпуклом программировании, то и экстремум (минимум) у нас будет один. А значит, чтобы найти минимальное значение функции издержек (минимальную среднюю квадратичную ошибку), достаточно найти тангенс угла наклона касательной или, иначе говоря, частную производную по нашей исследуемой переменной:
В оптимальном случае (), ошибка должна быть, конечно же, минимальной, а значит приравниваем производную к нулю:
Собственно, вот она, наша печка, от которой мы будем плясать дальше: перед нами система линейных уравнений.
Как будем решать?
Нужно отметить сразу, что оба решения, которые мы рассмотрим ниже, в данном случае являются теоретическими и учебными, так как и заранее известны (то есть у нас была предполагаемая возможность собрать достаточную статистику для вычисления оных). Однако, разбор таких вот упрощенных примеров — это лучшее, что можно придумать для понимания основных подходов.
Аналитическое решение
Решать эту задачу можно, так сказать, в лоб — с помощью обратных матриц:
Такое выражение называется уравнением Винера-Хопфа (Wiener–Hopf equation) — оно нам ещё пригодится в качестве некого эталона.
Конечно, если быть совсем дотошным, то, наверное, правильнее было бы записать это дело в общем виде, т.е. не с , а с (псевдо-инвертирование):
Однако, автокорреляционная матрица не может быть не-квадратной или сингулярной, поэтому вполне справедливо считаем, что никакого противоречия нет.
Из данного уравнения аналитически можно вывести, чему будет равняться минимальное значение функции издержек (т.е. в нашем случае MMSE — minimum mean square error):
Хорошо, одно решение есть.
Решение итеративным методом
Однако, да, решать систему линейных уравнений можно и без инвертирования автокорреляционной матрицы — итеративно (to save computations). Для этой цели рассмотрим родной и понятный метод градиентного спуска (method of steepest/gradient descent).
Суть алгоритма можно свести к следующему:
Выставляем искомую переменную в какое-то значение по умолчанию (например, )
Выбираем некоторый шаг (как именно выбираем, мы поговорим ниже).
И далее, как бы, спускаемся вниз по нашей исходной поверхности (в нашем случае, это поверхность MSE) с заданным шагом и определенной скоростью, определяемой величиной градиента.
Отсюда и название: gradient — градиентный или steepest — пошаговый descent — спуск.
Градиент в нашем случае уже известен: по сути, мы нашли его, когда дифференцировали функцию издержек (поверхность же вогнутая, сравните с [1, с. 220]). Запишем как будет выглядеть формула для итеративного обновления искомой переменной (коэффициентов фильтра) [1, с. 220]:
где — это номер итерации.
Теперь давайте поговорим о выборе величины шага.
Перечислим очевидные предпосылки:
шаг не может быть отрицательным или нулевым
шаг не должен быть слишком большим, иначе алгоритм не сойдется (будет, как бы, перескакивать от края до края, не попадая в экстремум)
шаг, конечно, может быть очень маленьким, но и это тоже не совсем желательно — алгоритм будет тратить большее количество времени
Относительно фильтра Винера ограничения, конечно, уже были давно найдены [1, с.222-226]:
где — это наибольшее собственное число автокорреляционной матрицы .
Кстати говоря, собственные числа и вектора — это отдельная интересная тема в контексте линейной фильтрации. Под это дело есть даже целый Eigen filter (см. Приложение 1).
Но и это, к счастью, не все. Есть и оптимальное, адаптивное решение:
где — это отрицательный градиент. Как видно из формулы, шаг пересчитывается в каждую итерацию, то есть адаптируется.
Окей, под второе решение мы тоже подготовили почву.
А нельзя ли на примерах?
Наглядности ради проведем небольшое моделирование. Использовать будем Python 3.6.4.
Скажу сразу, данные примеры — это часть одного из домашних заданий, каждое из которых предлагается студентам для решения в течении двух недель. Часть я переписал под python (в целях популяризации языка среди радиоинженеров). Возможно, вы встретите в Сети ещё какие-то варианты от других бывших студентов.
Наш линейный фильтр мы применим для задачи выравнивания канала (channel equalization), основной целью которого является нивелировать различные воздействия этого самого канала на полезный сигнал.
Исходники одним файлом можно скачать здесь или здесь (да, было у меня такое хобби — Википедию править).
Модель системы
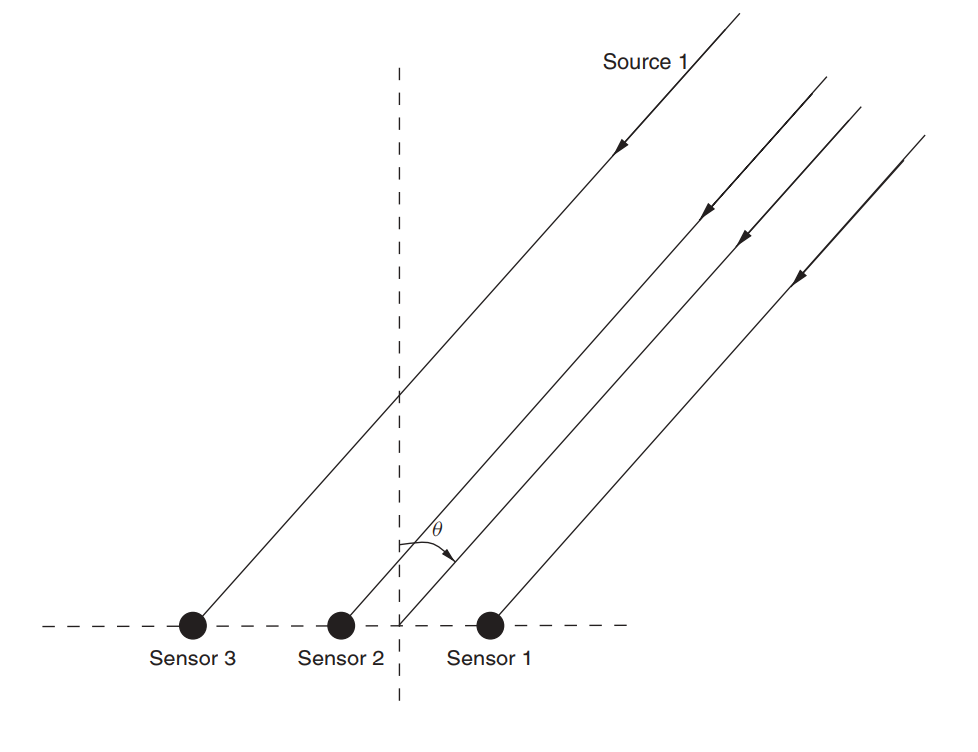
Допустим, есть антенная решетка (её мы уже рассматривали в статье про MUSIC).
Рис. 3. Ненаправленная линейная антенная решетка (ULAA — uniform linear antenna array) [2, с. 32].
Определим исходные параметры решетки:
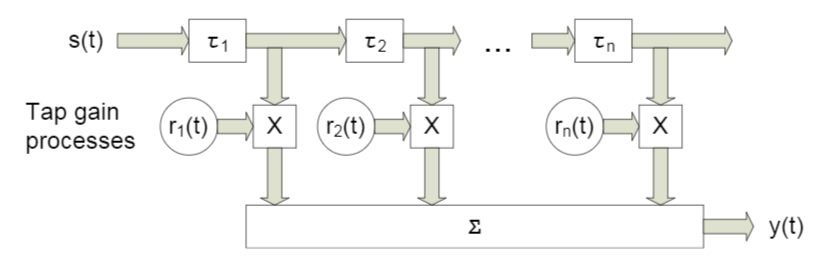
В данной работе мы будем рассматривать что-то вроде широкополосного канала с замираниями, характерной чертой которого является многолучевое распространение. Для таких случаев обычно применяют подход, при котором каждый луч моделируется с помощью задержки определенной величины (рис. 4).
Рис. 4. Модель широкополосного канала при n фиксированных задержках.[3, c. 29]. Как вы понимаете, конкретные обозначения роли не играют — далее мы будем использовать немного другие.
Модель принимаемого сигнала для одного сенсора выразим следующим образом:
В данном случае обозначает номер отсчета, — это отклик канала по l-ому лучу, L — количество регистров задержки, s — передаваемый (полезный) сигнал, — аддитивный шум.
Для нескольких сенсоров формула примет вид:
где и — имеют размерность , размерность равна , а размерность равняется .
Предположим, что каждый сенсор принимает сигнал тоже с какой-то задержкой, в силу падения волны под каким-то углом. Матрица в нашем случае будет сверточной матрицей для вектора откликов по каждому лучу. Думаю, в коде будет более понятно:
Далее зададим исходные данные для полезного сигнала и шума:
ВИНЕРА-ХОПФА УРАВНЕНИЕ
ВИНЕРА-ХОПФА УРАВНЕНИЕ — интегральное уравнение на полупрямой с ядром, зависящим от разности аргументов:
Уравнения такого типа часто возникают в задачах математич. физики, напр. в теории переноса излучения (проблема Милна), в теории дифракции (дифракция на полуплоскости, задача береговой рефракции).
Впервые исследования уравнения (1) были проведены в работах [1] и [2], где был развит метод факторизации (см. Винера-Хопфа метод). Именно идея факторизации явилась решающей для построения теории интегральных уравнений вида (1). В.-X. у. в предположении четности и экспоненциального убывания ядра k(х) рассматривались в [3].
Формальная схема решения В.-X. у. состоит в следующем. Пусть
тогда уравнение (1) можно записать на всей бесконечной прямой:
Если выполнены условия, при к-рых существует преобразование Фурье всех функций, входящих в уравнение (2):
то с помощью преобразования Фурье уравнение (2) сводится к функциональному уравнению
[1 — K(λ)] V(λ) = F(λ) + N(λ), (3)
где V(λ) и N(λ) — неизвестные функции. Метод Винера-Хопфа позволяет решить уравнение (3) для определенного класса функций. При этом обязательно должно выполняться условие: 1 — К(λ) ≠ 0. Для несимметричного ядра в теории уравнения (1) особую роль играет индекс уравнения:
Если K(x) ∈ L1(-∞, ∞) и 1 — K(λ) ≠ 0, то: при ν = 0 неоднородное уравнение (1) имеет единственное решение; при ν > 0 однородное уравнение (1) имеет ν линейно независимых решений; при ν
 .
. (1)
(1) ,
, .
. (2)
(2)
 и интегрированием по всей действительной оси:
и интегрированием по всей действительной оси:
 ,
, =>
=>
 (3)
(3) (4)
(4) ,
, (5)
(5)
 ,
, причем здесь
причем здесь  — комплексная переменная, и выполняется неравенство Im(k)=τ > τ— . Причем
— комплексная переменная, и выполняется неравенство Im(k)=τ > τ— . Причем
 ,
,
 ,
, (6)
(6)

 ,
, µ n , то функции можем считать определенными, и приравнять правую и левую часть в общем случае многочлену Pn (k) (это получается, если учесть стремление U+ ,U— к нулю по |к|-> ∞.Теперь у нас неопределенности нет, и в общем виде это выглядит так:
µ n , то функции можем считать определенными, и приравнять правую и левую часть в общем случае многочлену Pn (k) (это получается, если учесть стремление U+ ,U— к нулю по |к|-> ∞.Теперь у нас неопределенности нет, и в общем виде это выглядит так: ,
,


 ,F+ (k) аналитическая в Im(k)>τ— , F— (k) аналитическая в Im(k) ∞,и устремим контур к полосе.
,F+ (k) аналитическая в Im(k)>τ— , F— (k) аналитическая в Im(k) ∞,и устремим контур к полосе.
 ,
,
 ,причем Ф(k) равномерно стремится к 1 при |k|->∞.Тогда
,причем Ф(k) равномерно стремится к 1 при |k|->∞.Тогда  ,где функции Ф+ ,Ф— соответственно аналитические в
,где функции Ф+ ,Ф— соответственно аналитические в и
и 
 выполнены условия леммы1,значит,мы имеем право ее представить суммой F+ , F— , а Ф – произведением:
выполнены условия леммы1,значит,мы имеем право ее представить суммой F+ , F— , а Ф – произведением: ,Ф=Ф+ *Ф— .
,Ф=Ф+ *Ф— . (7)
(7)
 мы можем переходить к образам функций и мы получим
мы можем переходить к образам функций и мы получим
 ,
, и равномерно стремящуюся к 1 при
и равномерно стремящуюся к 1 при  наше алгебраическое уравнение перепишется как
наше алгебраическое уравнение перепишется как
 ,
, , L— — аналитическая в
, L— — аналитическая в  . По аналогии приводя к общему знаменателю, получаем уравнение на U+ ,U— :
. По аналогии приводя к общему знаменателю, получаем уравнение на U+ ,U— :
 ,
, соответственно, мы записываем решения в виде
соответственно, мы записываем решения в виде .
.
 ,
,  ,и перейдем уже в решении к пределу в нуле по каппа.
,и перейдем уже в решении к пределу в нуле по каппа. ,
,

 ,
,


 — это разница (ошибка) между заданным и полученным сигналами
— это разница (ошибка) между заданным и полученным сигналами — это некоторый предварительно заданный сигнал (desired signal)
— это некоторый предварительно заданный сигнал (desired signal) — это вектор отсчетов или, иными словами, сигнал на входе фильтра
— это вектор отсчетов или, иными словами, сигнал на входе фильтра — это сигнал на выходе фильтра
— это сигнал на выходе фильтра — это эрмитово сопряжение вектора коэффициентов фильтра — именно в их оптимальном подборе и кроется адаптивность фильтра
— это эрмитово сопряжение вектора коэффициентов фильтра — именно в их оптимальном подборе и кроется адаптивность фильтра
 обозначает функцию издержек (cost function) от вектора коэффициентов фильтра, а
обозначает функцию издержек (cost function) от вектора коэффициентов фильтра, а  обозначает мат. ожидание.
обозначает мат. ожидание.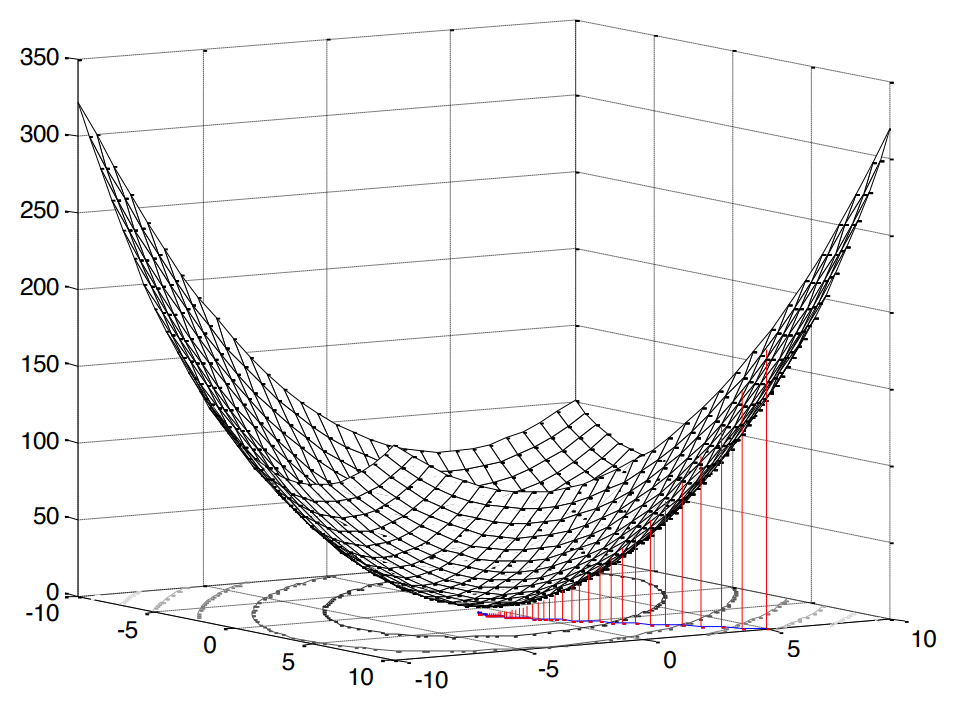

 — это дисперсия ожидаемого сигнала,
— это дисперсия ожидаемого сигнала,  — это вектор кросс-корреляции между входным вектором и ожидаемым сигналом, а
— это вектор кросс-корреляции между входным вектором и ожидаемым сигналом, а  — это матрица автокорреляции входного сигнала.
— это матрица автокорреляции входного сигнала.

 ), ошибка должна быть, конечно же, минимальной, а значит приравниваем производную к нулю:
), ошибка должна быть, конечно же, минимальной, а значит приравниваем производную к нулю:
 и
и  заранее известны (то есть у нас была предполагаемая возможность собрать достаточную статистику для вычисления оных). Однако, разбор таких вот упрощенных примеров — это лучшее, что можно придумать для понимания основных подходов.
заранее известны (то есть у нас была предполагаемая возможность собрать достаточную статистику для вычисления оных). Однако, разбор таких вот упрощенных примеров — это лучшее, что можно придумать для понимания основных подходов.
 , а с
, а с  (псевдо-инвертирование):
(псевдо-инвертирование): 


 )
) (как именно выбираем, мы поговорим ниже).
(как именно выбираем, мы поговорим ниже).
 — это номер итерации.
— это номер итерации.
 — это наибольшее собственное число автокорреляционной матрицы
— это наибольшее собственное число автокорреляционной матрицы 
 — это отрицательный градиент. Как видно из формулы, шаг пересчитывается в каждую итерацию, то есть адаптируется.
— это отрицательный градиент. Как видно из формулы, шаг пересчитывается в каждую итерацию, то есть адаптируется.

 — это отклик канала по l-ому лучу, L — количество регистров задержки, s — передаваемый (полезный) сигнал,
— это отклик канала по l-ому лучу, L — количество регистров задержки, s — передаваемый (полезный) сигнал,  — аддитивный шум.
— аддитивный шум.
 и
и  , размерность
, размерность  равна
равна  , а размерность
, а размерность  равняется
равняется  .
.