Силовой анализ характерных структурных групп
3.3.1. Структурная группа 2-го класса, 1-го вида
Известны внешние силы  и
и  , а также точки их приложения К2 и К3.
, а также точки их приложения К2 и К3.
Найти реакции в кинематических парах А, В и С (рис. 3.5).
1. Строим структурную группу в масштабе длин mL (рис. 3.5).
2. Наносим на неё все внешние силы и  .
.
3. В кинематических парах А и С действие отброшенных звеньев (например, кривошипа 1 и стойки 0) заменяем силами реакций  и
и  , разложив каждую из них на нормальную и тангенциальную составляющие:
, разложив каждую из них на нормальную и тангенциальную составляющие:
 =
=  +
+  и
и  =
=  +
+  .
.
4. Составляем уравнение равновесия структурной группы:
 , или
, или  . (3.1)
. (3.1)
5. Вычисляем величины тангециальных сил; для этого используем условие, при котром моменты сил относительно точки В, приложенных к звеньям 2 и 3, равны нулю:
 ,
,  , откуда
, откуда  ;
;
 ,
,  , откуда
, откуда  .
.
Следует учитывать, что если в процессе решения эти тангенциальные силы получились с отрицательным знаком, то на плане структурной группы их предварительно выбранное направление следует поменять на противоположное.
6. Неизвестные  и
и  находим путём графического изображения векторного уравнения (3.1) в масштабе, т.е. строим план сил структурной группы, для чего выбираем масштаб плана сил
находим путём графического изображения векторного уравнения (3.1) в масштабе, т.е. строим план сил структурной группы, для чего выбираем масштаб плана сил
 , Н/м,
, Н/м,
где  – длина вектора, мм, изображающего силу
– длина вектора, мм, изображающего силу  на плане сил, выбирается произвольно.
на плане сил, выбирается произвольно.
При выборе учитываются два условия: план сил должен размещаться на отведённом месте чертежа, масштаб должен быть удобен для расчётов (быть круглым числом).
Переводим (пересчитываем) силы уравнения (3.1) в векторные отрезки с длинами:  , мм;
, мм;  , мм;
, мм;  , мм.
, мм.
Тогда уравнение (3.1) запишется в виде
 . (3.2).
. (3.2).
Построение плана сил ведём в последовательности написания уравнения (3.2), (рис. 3.6).
7. Вычисляем реакции

 ,
,
где длины отрезков  и
и  берем в мм из плана сил.
берем в мм из плана сил.
8. Определяем реакцию в кинематической паре В, для чего составляем векторное уравнение равновесия звена 2 или звена 3. Например, условие равновесия звена 2 можно записать в виде
 , (3.3)
, (3.3)
где R3-2 – сила реакции в кинематической паре В.
Так как  и известны, то, построив план сил звена 2 (рис. 3.7) и графически изобразив уравнение (3.3), получим силу
и известны, то, построив план сил звена 2 (рис. 3.7) и графически изобразив уравнение (3.3), получим силу  :
:
 .
.

Рис. 3.5. План структурной группы 2-го класса, 1-го вида


Рис. 3.6. План сил структурной группы Рис. 3.7. План сил звена 2
3.3.2. Структурная группа 2-го класса, 2-го вида
Условие равновесия структурной группы (рис. 3.8):
 . (3.4)
. (3.4)

Рис. 3.8. План структурной группы 2-го класса, 2-го вида
Величина тангенциальной составляющей силы реакции в шарнире вычисляется по формуле, полученной из условия равенства нулю моментов всех сил, приложенных к шатуну 4, относительно точки F:
 ;
;  ,
,
 ,
,
где h4 – плечо силы Р4 относительно точки F, берется из плана структурной группы (см. рис. 3.6), построенной в масштабе длин mL.
Силы  и
и  берут из плана сил, построенного с исполь-зованием уравнения (3.4) в выбранном масштабе
берут из плана сил, построенного с исполь-зованием уравнения (3.4) в выбранном масштабе  , а силу
, а силу  находят из уравнения равновесия ползуна
находят из уравнения равновесия ползуна  , построив план сил ползуна.
, построив план сил ползуна.
3.3.3. Структурная группа 2-го класса, 3-го вида
Рассмотрим условие равновесия звена 3 (рис. 3.9)
 , (3.5)
, (3.5)
где сила  задана.
задана.
 Из условия равенства нулю всех моментов сил звена 3 относительно точки В находим силу
Из условия равенства нулю всех моментов сил звена 3 относительно точки В находим силу  , предполагая, что без учета трения ее вектор перпендикулярен АВ:
, предполагая, что без учета трения ее вектор перпендикулярен АВ:
 ;
;  ,
,
где h3 – плечо момента силы P3;  .
.
Отсюда  .
.
Рис. 3.9. План структурной группы
2-го класса, 3-го вида
Силу реакции между звеньями 1 (кривошипом) и 2 (ползуном)  находим из условия
находим из условия  . Силу реакции R0-3 между коромыслом 3 и станиной можно найти, построив план сил, используя уравнение (3.5) равновесия звена 3.
. Силу реакции R0-3 между коромыслом 3 и станиной можно найти, построив план сил, используя уравнение (3.5) равновесия звена 3.
3.3.4. Силовой анализ ведущего звена
Вариант 1(ведущее звено – зубчатое колесо или кривошип)
 На изображенном плане кривошипа (рис. 3.10) сила реакции в кинематической паре А
На изображенном плане кривошипа (рис. 3.10) сила реакции в кинематической паре А  , Рур
, Рур  ОА.
ОА.
Силу  берём из силового анализа, проведённого ранее для присоединённой к кривошипу структурной группы. Сила реакции
берём из силового анализа, проведённого ранее для присоединённой к кривошипу структурной группы. Сила реакции  || OA (исходя из теоремы о трёх силах, в соответствии с которой линии сил, действующих на тело, находящееся в равновесии, пересекаются в одной точке. В данном случае это точка А).
|| OA (исходя из теоремы о трёх силах, в соответствии с которой линии сил, действующих на тело, находящееся в равновесии, пересекаются в одной точке. В данном случае это точка А).
Рис. 3.10. План кривошипа
с приложенными силами
Условие равновесия звена 1 (кривошипа)
 . (3.6)
. (3.6)
Строим план сил звена 1 в масштабе  (рис. 3.11), предва-рительно записав уравнение равновесия (3.6) в виде векторных отрезков
(рис. 3.11), предва-рительно записав уравнение равновесия (3.6) в виде векторных отрезков
 .
.
Уравновешивающая сила вычисляется по формуле
 ,
,
а реакция в кинематической паре О – по формуле
 ,
,
где величины  и
и  берутся измерением на плане сил (рис. 3.11).
берутся измерением на плане сил (рис. 3.11).

Рис. 3.11. План сил кривошипа
Вариант 2 (ведущее звено – муфта скольжения, совмещённая с кривошипом)
В этом случае вместо уравновешивающей силы к ведущему звену приложен уравновешивающий момент  (рис. 3.12).
(рис. 3.12).
 Уравнения равновесия ведущего звена 1:
Уравнения равновесия ведущего звена 1:
 ,
,
 ,
,
|
где h2-1 – плечо силы R2-1 относительно оси вращения кривошипа О, откуда  ,
,  .
.
Рис. 3.12. План муфты
Для нахождения величины плеча h2-1 можно построить план звена в масштабе, нанести силы и провести необходимые измерения.
Силовой анализ характерных структурных групп
4.1. Структурная группа 2-го класса 1-го вида
 Известны: внешние силы Ри2 и Р и3, а также точки их приложения К2 и К3.
Известны: внешние силы Ри2 и Р и3, а также точки их приложения К2 и К3.
Найти: реакции в кинематических парах А, В и С.
Рис. 4.1. План структурной группы 2 класса 1 вида
1. Строим структурную группу в масштабе длин mL.
3. В кинематических парах А и С действие «отброшенных» звеньев 1 и 0 заменяем силами реакций R1-2 и R0-3, разложив каждую из них на нормальную и тангенциальную составляющие:  ,
,  и
и  ,
,  .
.
4. Составляем уравнение равновесия структурной группы:
 ; или
; или  (1)
(1)
5. Вычисляем величины тангециальных сил; для этого используем условие, что моменты всех сил, приложенных к звену 2 или звену 3, относительно точки В, равны нулю:
 ;
;  , откуда
, откуда  ;
;
 ;
;  , откуда
, откуда  .
.
Следует учитывать, что если в процессе решения этих уравнений тангенциальные силы получены с отрицательным знаком, то на плане структурной группы предварительно выбранные их направления следует поменять на противоположные.
6. Неизвестные  и
и  находим путём графического изображения векторного уравнения (1) в масштабе, то есть, строим план сил структурной группы (рис.4.2).
находим путём графического изображения векторного уравнения (1) в масштабе, то есть, строим план сил структурной группы (рис.4.2).
Для построения плана сил выбираем масштаб:  , [Н/м],где
, [Н/м],где  – длина вектора, изображающего силу
– длина вектора, изображающего силу  на плане сил, выбирается произвольно; при выборе учитываются два условия: чтобы план сил разместился на отведённом месте чертежа, а масштаб был удобен для расчётов (был «круглым» числом).
на плане сил, выбирается произвольно; при выборе учитываются два условия: чтобы план сил разместился на отведённом месте чертежа, а масштаб был удобен для расчётов (был «круглым» числом).
Переводим (пересчитываем) силы уравнения (1) в векторные отрезки с длинами:  , [мм];
, [мм];  , [мм];
, [мм];  , [мм].
, [мм].
Тогда уравнение (1) запишется в виде:
 (2).
(2).
Построение плана сил ведём в последовательности написания уравнения (2):

Рис. 4.2. План сил структурной группы.
7. Вычисляем реакции: 

8. Определяем реакцию в кинематической паре В. Для этого составляем векторное уравнение равновесия звена 2 или звена 3; например, условие равновесия звена 2 можно записать в виде:
 (3).
(3).
 Так как и
Так как и  известны, то построив план сил звена 2 (то есть графически изобразив уравнение (3)), получим
известны, то построив план сил звена 2 (то есть графически изобразив уравнение (3)), получим  :
: 
Рис. 5.1. План сил звена 2.
 5.2. Структурная группа 2-го класса 2-го вида.
5.2. Структурная группа 2-го класса 2-го вида.
Условие равновесия структурной группы:
 .
.
Величина тангенциальной составляющей
вычисляется по формуле:
 ;
;
Рис. 5.3. План структурной группы 2 класса второго вида.
 ,
,  – берут из построенного плана сил, а
– берут из построенного плана сил, а  –из уравнения равновесия
–из уравнения равновесия
ползуна  .
.
5.3.  Структурная группа 2-го класса 3-его вида
Структурная группа 2-го класса 3-его вида
Рассмотрим равновесие звена 3: 
 задана;
задана; 
 ;
;  отсюда
отсюда  ; Величину и направление R находим из плана сил:
; Величину и направление R находим из плана сил:
Рис. 15. План сил структурной группы  .
.
5.5. Силовой анализ ведущего звена
Вариант 1. Ведущее звено – зубчатое колесо или кривошип,  .
.
 Здесь берём из силового анализа присоединённого к звену структурной группы.
Здесь берём из силового анализа присоединённого к звену структурной группы.  || OA (из теоремы о трёх силах, действующих на тело, которые обязательно пересекаются).
|| OA (из теоремы о трёх силах, действующих на тело, которые обязательно пересекаются).
Условие равновесия звена (1):  .
.
 Строим план сил звена (1) в масштабе
Строим план сил звена (1) в масштабе  , записав уравнение
, записав уравнение  ;
;
Уравновешивающая сила  ;
;
Реакция в кинематической паре О  .
.
Вариант 2. Ведущее звено – муфта скольжения.
 Условие равновесия звена 1:
Условие равновесия звена 1:  ,
,
откуда  .
.
Уравнение моментов относительно О:
 ,
,
откуда  .
.
5.6. Теорема о «жёстком» рычаге Н.Е.Жуковского
Теорема используется для определения уравновешивающей силы или уравновешивающего момента  и
и  без предварительного определения реакций в кинематических парах механизма.
без предварительного определения реакций в кинематических парах механизма.
Она является графической интерпретацией принципа возможных перемещений. Для реального механизма возможные перемещения являются реальными.
Сумма работ всех внешних сил, приложенных к звеньям механизма, равна нулю:
 , (1)
, (1)
где  – все внешние силы, в то числе инерции и все, действующие на звенья
– все внешние силы, в то числе инерции и все, действующие на звенья
механизма (силы реакции не в счёт);
 – элементарные перемещения точек приложения этих сил;
– элементарные перемещения точек приложения этих сил;
 – угол приложения внешних сил, или угол давления.
– угол приложения внешних сил, или угол давления.
Разделим уравнение (1) на  и получим:
и получим:
 , (2)
, (2)
То есть сумма мгновенных мощностей (  ) равна нулю. Для определения величины мгновенных мощностей можно выполнить и такое решение:
) равна нулю. Для определения величины мгновенных мощностей можно выполнить и такое решение:
 Дано звено ВС с
Дано звено ВС с  и
и  . Построим план скоростей, повёрнутый на 90 0 ; здесь
. Построим план скоростей, повёрнутый на 90 0 ; здесь  ;
;  . Вычислим момент силы
. Вычислим момент силы
относительно полюса Рv:
 . (3)
. (3)
С учётом этого уравнения уравнение (2) можно
 . (4)
. (4)
|

Так как масштаб  , то
, то
– запись теоремы Жуковского. (5)
Алгебраическая сумма мощностей всех внешних сил, приложенных в соответствующие точки повёрнутого на 90 0 плана скоростей, относительно полюса равна нулю.
Последовательность определения по теореме Н.Е.Жуковского:
1. Построить повёрнутый на 90 0 (в любую сторону) план скоростей механизма.
2. В соответствующие точки плана скоростей приложить все ранее определённые внешние силы (включая силы инерции и силы веса), действующие на механизм, в том числе и уравновешивающую силу .
3. Составить уравнение вида (5). Плечи моментов сил брать из повёрнутого плана скоростей.
4. Из составленного уравнения определить .

 ,
,
отсюда  .
.
Если получим с отрицательным знаком, то её предварительно выбранное
направление следует поменять на противоположное.
Данная система уравнений характерна для структурной группы
Лекция 4. Силовой ( кинетостатический ) анализ механизмов.
Общие сведения и определения
Проектирование нового механизма всегда включает его силовое исследование, так как по найденным силам производится последующий расчет на прочность элементов кинематических пар и звеньев механизма.
При проведении силового анализа решаются основные задачи:
1. Определение реакций в кинематических парах механизмов, находящихся под действием заданных внешних сил. Эти реакции затем используются для расчёта звеньев и элементов кинематических пар (например, подшипников) на прочность, жёсткость, долговечность и т.д.
2. Определение уравновешивающей силы  или уравновешивающего момента
или уравновешивающего момента  , приложенных к ведущему звену. Они уравновешивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
, приложенных к ведущему звену. Они уравновешивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
3. Дополнительно выясняют вопросы об уравновешенности механизма, износе его звеньев, о потерях на трение в отдельных кинематических парах, о коэффициенте полезного действия механизма в целом и др.
При силовом анализе, кроме основной (полезной) нагрузки на рабочий орган, необходимо учитывать силы тяжести звеньев, их силы инерции, силы трения в кинематических парах.
Силовой расчет ведется методом кинетостатики. В отличие от статического , кинетостатический расчет механизмов наряду с внешними силами (движущими силами, силами полезных и вредных сопротивлений, силами тяжести) учитывает и силы инерции масс звеньев.
Метод кинетостатики основан на принципе Даламбера, который применительно к механизмам можно сформулировать так: если ко всем внешним силам, действующим на систему звеньев, добавить силы инерции, тогда под действием всех этих сил система звеньев может условно считаться находящейся в равновесии.
При кинетостатическом расчете кинематическая цепь механизма разбивается на группы Ассура , которые являются статически определимыми. Расчет ведется путем последовательного рассмотрения условий равновесия отдельно каждой группы, начиная с наиболее удаленной от исходного механизма (ведущего звена), последним рас c читывается ведущее звено.
При рассмотрении условий равновесия группы без учета силы трения составляющие реакции во внешней вращательной паре представляются направленными по звену (нормальная реакция) и перпендикулярно звену (тангенциальная реакция) и приложены они в центре шарнира, во вращательной паре подлежат определению величины и направления нормальной и тангенциальной реакций.
В поступательной паре, в общем случае, подлежат определению величина и точка приложения реакции, так как известно только то, что направление реакций всегда перпендикулярно оси направляющих пары.
Анализ свойств механизма можно получить путем исследования каждой группы Ассура через 10 градусов (20 градусов или 30 градусов) угла поворота кривошипа. В этом случае выявляется полная картина силового нагружения всех подвижных соединений механизма и звеньев за цикл движения машины.
Цикл – промежуток времени, по истечении которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться вновь.
Классическая задача силового анализа механизма обычно решается при таких исходных данных:
1) Кинематическая схема механизма.
2) Размеры и иные геометрические параметры звеньев.
3) Законы движения входных звеньев.
4) Массы и моменты инерции звеньев.
5) Силы и моменты полезных сопротивлений.
В дальнейшем будем считать, что к моменту начала силового расчета механизма выполнен его полный кинематический анализ и рассчитаны веса звеньев, их инерционные силы и моменты, а силы и моменты полезных сопротивлений заданы.
Этапы кинетостатического расчёта
Различают два этапа кинетостатического расчёта:
— Расчёт механизма без учёта потерь на трение в кинематических парах.
— После конкретного конструирования узлов производится дополнительный расчёт потерь мощности в кинематических парах на преодоление трения.
Итогом кинетостатического расчёта является определение движущей силы на ведущем звене, которая даёт возможность определить крутящий момент по формуле  и мощность, по формуле:
и мощность, по формуле:  .
.
Полная мощность определяется по формуле:  . По значению полной мощности выбирается мощность двигателя.
. По значению полной мощности выбирается мощность двигателя.
Порядок проведения кинетостатического расчёта:
1. Определение степени подвижности механизма.
2. Для каждого отдельного положения механизма внутри цикла его работы строятся планы скоростей и планы ускорений. С помощью планов ускорений определяются ускорения центров масс.
3. Механизм раскладывается на структурные группы Ассура .
4. Производится кинетостатический расчёт отдельных структурный групп начиная с последней , постепенно приближаясь к ведущему звену.
5. Кинетостатический расчёт ведущего звена.
6. Определение крутящего момента или движущей силы на ведущем звене.
7. Определение мощности двигателя.
8. Пункты 4-7 повторяются для множества положений механизма за полный цикл его работы.
9. Выбираются наибольшие значения мощности и усилий, действующие в кинематических парах.
10. На основании полученных данных составляется задание на проектирование.
Силы, действующие в механизмах
Различают две группы внешних сил.
Движущие силы Рдв или моменты движущих сил Мдв , которые:
— совершают положительную работу;
— направлены в сторону скорости точки приложения силы или под острым углом к ней;
— задаются посредством механической характеристики двигателя.
Пример: силы давления газа на поршень в двигателе внутреннего сгорания, силы веса при опускании груза и т.д.
Силы сопротивления РС и их моменты МС, которые:
— совершают отрицательную работу;
— направлены противоположно скорости.
В свою очередь силы сопротивления делятся на силы:
— полезного сопротивления Рп .с и моменты Мп.с (силы тяжести при подъеме груза);
— вредного сопротивления: трение в кинематических парах, сопротивление среды, внутреннее сопротивление (например, силы упругости звеньев).
Кроме этого существуют:
— силы веса (тяжести)  , где
, где  – масса звена в кг;
– масса звена в кг;  м/с 2 – ускорение свободного падения. При кинематическом исследовании считают, что сила тяжести
м/с 2 – ускорение свободного падения. При кинематическом исследовании считают, что сила тяжести  приложена в центре тяжести звена. Если звено выполнено в виде стержня, то его ц.т . расположен в центре симметрии звена, а если в виде ползуна, то в центре шарнира. Силы тяжести в течени и расчётного цикла могут быть как движущими, так и силами полезного сопротивления, поэтому работа этих сил за цикл равна нулю. Эти силы считаются внешними силами.
приложена в центре тяжести звена. Если звено выполнено в виде стержня, то его ц.т . расположен в центре симметрии звена, а если в виде ползуна, то в центре шарнира. Силы тяжести в течени и расчётного цикла могут быть как движущими, так и силами полезного сопротивления, поэтому работа этих сил за цикл равна нулю. Эти силы считаются внешними силами.
— силы инерции  ;
;
— моменты сил инерции  , где m , JS – масса и массовый момент инерции звена;
, где m , JS – масса и массовый момент инерции звена;  и
и  – линейное и угловое ускорения;
– линейное и угловое ускорения;
— силы реакций в кинематических парах  , возникающие в опорах звеньев и являющиеся внутренними силами для механизма в целом и внешними для каждого отдельного звена.
, возникающие в опорах звеньев и являющиеся внутренними силами для механизма в целом и внешними для каждого отдельного звена.
Необходимо отметить, что под силами понимаются равнодействующие соответствующих распределенных в месте контакта кинематической пары нагрузок. Все вышесказанное относительно сил распространяется и на моменты сил.
Силы инерции звеньев и моменты сил инерции. Так как звенья механизма находятся в движении, и имеют свои массы, то, особенно в быстродействующих механизмах рычажного типа, обязательно имеет место неравномерность движения звеньев. Это означает, что ускорения этих звеньев не равны нулю, что приводит к возникновению дополнительных сил динамического характера в виде сил инерции  и моментов инерции
и моментов инерции  . Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены к силе инерции
. Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены к силе инерции  , приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим (рис. 4.1).
, приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим (рис. 4.1).
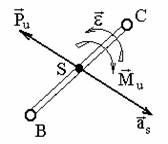
Рис. 4.1. Сила инерции звена и момента сил инерции
 – главный вектор сил инерции, или сила инерции;
– главный вектор сил инерции, или сила инерции;
 – главный момент сил инерции, или момент сил инерции; m – масса звена;
– главный момент сил инерции, или момент сил инерции; m – масса звена;
 – массовый момент инерции относительно центра масс;
– массовый момент инерции относительно центра масс;
 – ускорение центра масс;
– ускорение центра масс;
 – угловое ускорение звена.
– угловое ускорение звена.
 и
и  направлены в стороны, противоположные ускорениям
направлены в стороны, противоположные ускорениям  и
и  .
.
Для дальнейших расчётов удобно заменить  и
и  одной силой, использовав для этого 3 метода:
одной силой, использовав для этого 3 метода:
Перенос силы  на плечо
на плечо  : момент сил инерции заменяется парой сил
: момент сил инерции заменяется парой сил  с плечом hu (рис. 4.2), причём одна сила приложена к центру масс звена S и направлена противоположно преобразуемой силе
с плечом hu (рис. 4.2), причём одна сила приложена к центру масс звена S и направлена противоположно преобразуемой силе  , а другая смещена на плечо hu и приложена к точке К – центру качания звена.
, а другая смещена на плечо hu и приложена к точке К – центру качания звена.
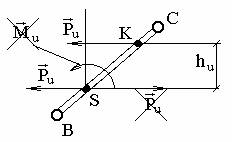
Рис. 4.2. Перенос силы на плечо при замене силы и момента одной силой
Определение центра качания звена через мгновенный центр ускорений (МЦУ). При этом сила инерции  переносится параллельно самой себе на расстояние
переносится параллельно самой себе на расстояние  (рис. 4.3), вычисленное по формуле
(рис. 4.3), вычисленное по формуле
 , мм ,
, мм ,
где  – мгновенный центр ускорений звена;
– мгновенный центр ускорений звена;  откладывается в сторону, являющуюся продолжением отрезка
откладывается в сторону, являющуюся продолжением отрезка  .
.
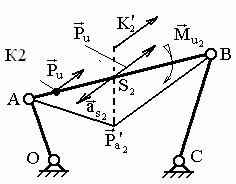
Рис. 4.3. Определение центра качания звена
Метод замещающих точек. Подробно рассмотрен в литературе.
Рассмотрим определение сил и моментов в различных случаях.
 ;
;
 ;
;  ;
;
 ;
;  .
.
 ;
;
 ;
;  ;
;
; .
;
; ;
 ;
;  .
.
;
; ;
; .
 ;
;
; ;
; .
 ;
;
; ;
; .
Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
http://poisk-ru.ru/s67042t1.html
http://www.teormach.ru/lect4.htm