Даны уравнения движения точки найти радиус кривизны
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ ПО КИНЕМАТИКЕ
7.1. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.2. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.3. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки:
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.4. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.5. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки по осям :
 ,
,
 ,
,

Ускорения точки по осям:
 ,
,
 ,
,
 .
.
Модуль касательного ускорения точки:
 , а модуль нормального ускорения
, а модуль нормального ускорения  .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением  .
.
7.6. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано: , ,  .
.
Решение: Скорости точки по осям :
,
,
Ускорения точки по осям:
,
,
.
Модуль касательного ускорения точки:
,
а модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением  .
.
7.7. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.8. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.9. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 .
.
 ,
,
 ,
,

Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.10. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.11. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.12. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано: ,  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
,

,
 ,
,

Модуль полного ускорения:
Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.13. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.14. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Найти:  ,
,  ,
,  .
.
Решение: Скорости точки по осям :
 ,
,
 ,
,
 ,
,

Ускорения точки по осям:
 ,
,
 ,
,

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.15. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.16. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.17. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.18. Дан закон движения точки по окружности радиусом r . Определить:
1) скорость и ускорение точки при  и
и  ;
;
2) моменты остановки точки;
3) путь, пройденный точкой за 10секунд.
Дано:  ,
,  , , .
, , .
Найти:  ,
,  ,
,  ,
,  ,
,  ,
,  , П.
, П.
Решение: 1. На траектории отметим точку О – начало отсчета координаты s и укажем положительное направление отсчета этой координаты. Отметим положение точки в заданные моменты времени: При  :
:
 ;
;
При :
 .
.
Проведем из этих точек естественные оси координат.
Определим проекцию скорости на касательную:
 .
.
При :  ;
;
При :  .
.
Векторы и совпадают со своими проекциями. Определим проекции ускорения на естественнее оси координат :
 ;
;  , Полное ускорение точки
, Полное ускорение точки  .
.
При :
 ,
,
 и
и
 .
.
При  :
:
 ,
,
 и
и
 .
.
2. Чтобы найти время остановки надо найти время, когда скорость точки равна нулю:
 , получим
, получим  и
и  .
.
3. Поскольку за 10 секунд точка сделала две остановки, пройденный ею путь за 10с можно найти как сумму пути, пройденного от начала до первой остановки, от первой до второй остановки и от второй до момента времени :
 ,
,
 ;
;  ;
;  ;
;  .
.
Путь пройденный точкой за 10 секунд:
 .
.
7.19. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  (1)
(1)
 ( x и y – в см , t и t 1 – в с).
( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2) для t = t 1 положение точки на траектории;
3)  .
.
Решение: 1) Уравнение движения (1) можно рассматривать как параметрические уравнения траектории точки. Чтобы получить уравнения траектории в координатной форме, исключаем время t из уравнений (1).
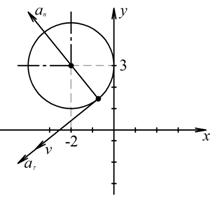
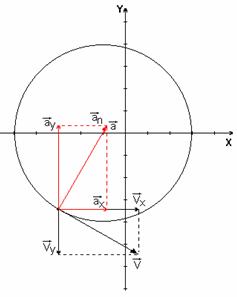
Возводя обе части равенств в квадрат, а затем складывая равенства, получаем  , т.е. траекторией точки М является окружность радиуса 2, показанная на рис.1.
, т.е. траекторией точки М является окружность радиуса 2, показанная на рис.1.
2) Определяем положение точки М в заданный момент времени t =1 с :
Вектор скорости точки
 . (2)
. (2)
 (3)
(3)
Здесь  – орты осей
– орты осей  и
и  ;
;  – проекции скорости и ускорения точки на оси координат.
– проекции скорости и ускорения точки на оси координат.
Найдем их, дифференцируя по времени уравнения движения (1):








По найденным проекциям определяем модуль скорости:
 , (4)
, (4)
 ,
,
 ,
,
и модуль ускорения точки:
 , (5)
, (5)

Модуль касательного ускорения точки
 , (6)
, (6)
 ; (7)
; (7)
 выражает проекцию ускорения точки на направление ее скорости. Знак «+» при означает, что движение точки ускоренное, направление
выражает проекцию ускорения точки на направление ее скорости. Знак «+» при означает, что движение точки ускоренное, направление  и
и  совпадают; знак «–» – что движение замедленное.
совпадают; знак «–» – что движение замедленное.
Вычисляем модуль касательного ускорения для заданного момента времени

Модуль нормального ускорения точки
 . (8)
. (8)
Если радиус кривизны траектории  в рассматриваемой точке неизвестен, то нормальное ускорение можно определить по формуле
в рассматриваемой точке неизвестен, то нормальное ускорение можно определить по формуле
 . (9)
. (9)
При движении точки в плоскости формула (9) принимает вид
 .
.
Модуль нормального ускорения можно определить и следующим образом:
 . (10)
. (10)
Воспользуемся в нашем случае формулой (10)

Радиус кривизны траектории в рассматриваемой точке определим из выражения:
 . (11)
. (11)
Тогда 
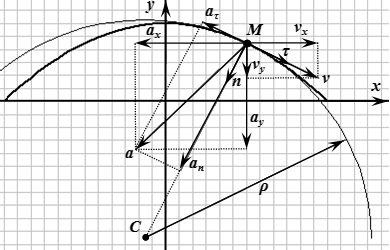
На рис. 1 показано положение точки М в заданный момент времени. Вектор строим по составляющим  и
и  , причем этот вектор должен по направлению совпадать с касательной к траектории. Вектор
, причем этот вектор должен по направлению совпадать с касательной к траектории. Вектор  строим по составляющим
строим по составляющим  и
и  и затем раскладываем на составляющие и
и затем раскладываем на составляющие и  . Совпадение величин
. Совпадение величин  и
и  , найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
, найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
7.20. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2) .
Указания. Задача — относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются скорость, касательное и нормальное ускорения точки при естественном способе задания ее движения. В задаче все искомые величины нужно определить только для момента времени t 1 = 1 с .
1. Для определения уравнения траектории точки исключим из заданных уравнений движения время t :
Отсюда окончательно находим уравнение траектории точки (параболы, см. рисунок):
2. Скорость точки найдем по ее проекциям на координатные оси:
V =  и при t 1 = 1 с,
и при t 1 = 1 с,
3. Аналогично найдем ускорение точки:
а = 
4. Касательное ускорение найдем, дифференцируя по времени равенство:
 . (3)
. (3)
ч исловые значения всех величин, входящих в правую часть выражения (3), определены и даются равенствами (1) и (2).
Подставив в (3) эти числа, найдем сразу, что при t 1 = 1 с
 =7,49 см/с 2 .
=7,49 см/с 2 .
5. Нормальное ускорение точки:
a n =  .
.
Подставляя сюда найденные числовые значения a 1 и a 1 τ , получим, что при t 1= 1 с
6. Радиус кривизны траектории ρ = V 2 / a n .
Подставляя сюда числовые значения V 1 и a 1 n , найдем, что при t 1 = 1 с
Ответ: V 1= 8 ,54 см/с, а 1 =8 см/с 2 , =7,49 см/с 2 , a 1 n =2,81 см/с 2 , ρ1 =25,95 см.
7.21. Точка движется по дуге окружности радиуса R =1 м по закону  ( s – в метрах, t – в секундах), где s = AM (см. рисунок).
( s – в метрах, t – в секундах), где s = AM (см. рисунок).
Найти: скорость и ускорение точки в момент времени t 1 =1 с .
Определяем скорость точки:
V = ds / dt =  .
.
При t 1 =1 с получим  = -1,26 м/ с .
= -1,26 м/ с .
Ускорение находим по его касательной и нормальной составляющим:
 ,
,
п ри t 1 = 1 с получим , учтя, что R = 1 м
 ,
,
тогда ускорение точки при t 1 =1 с будет:
 =1,59 м/с 2 .
=1,59 м/с 2 .
Изобразим на рисунке векторы  ,
,  , учитывая знак V 1 и считая положительным направление от А к М.
, учитывая знак V 1 и считая положительным направление от А к М.
7.22. По заданным уравнениям движения точки М установить вид её траектории и для момента времени t = t 1(с) найти положение точки на траектории, её скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории.
Дано:  ,
,  , t 1=1 сек ( x и y – в см , t и t 1 – в с).
, t 1=1 сек ( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2)  .
.
1) Найдём траекторию движения:
Для этого исключим параметр t .

Возведём во вторую степень, получившиеся уравнения, а затем сложим, таким образом, исключится t . Получим:
Это окружность с центром в точке с координатами (-1;0) и радиусом 
2) Найдём положение точки на траектории в момент времени t = t 1:
3) Определим скорость токи:
Для нахождения вектора полной скорости необходимо сложить 2 вектора:

Найдём модуль полной скорости:

для момента времени t 1:
4) Определим ускорение точки:
для момента времени t 1:
для момента времени t 1:
Найдём полное ускорение:

Найдём модуль полного ускорения:
для момента времени t 1:

Определим касательное ускорение  :
:
 или,
или, 
для момента времени t :

Определим нормальное ускорение an :
для момента времени t 1:

5) Из полученных результатов можно найти радиус кривизны траектории , в момент времени t 1:
Действительно, этот радиус совпадает с радиусом окружности (траектории).
7.23. Точка М движется согласно уравнений  ;
;  ; ( x , y — в метрах, t — в секундах). Определить уравнение траектории точки, для момента времени t =1с, найти положение точки, а также скорость, полное, касательное, нормальное ускорения точки и радиус кривизны траектории.
; ( x , y — в метрах, t — в секундах). Определить уравнение траектории точки, для момента времени t =1с, найти положение точки, а также скорость, полное, касательное, нормальное ускорения точки и радиус кривизны траектории.
1) Найдем уравнение траектории точки. Для определения уравнения траектории исключим из уравнений движения время . Из первого уравнения движения точки найдем 
Из второго уравнения движения найдем 
Возведя полученные значения ( правую и левую стороны уравнения ) в квадрат и складывая их находим:
 .
.
Следовательно, траекторией точки является эллипс с центром в точке с координатами (3;1).
Вид траектории показан на рисунке.
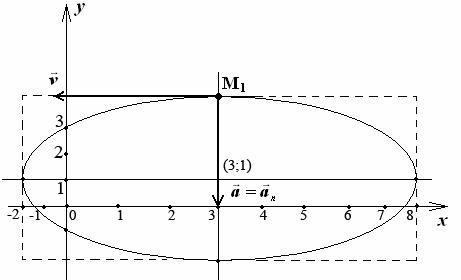
2) Найдем положение точки в момент времени t =1с
 ;
;  .
.
Положение точки М 1 показано на рисунке.
3) Найдем скорость точки М
 ,
,
Где  , или в момент времени t1=1c
, или в момент времени t1=1c
 , или в момент времени t1=1c
, или в момент времени t1=1c


4) Найдём ускорение точки.
 ,
,
где  , или
, или  ,
,
 , или
, или 
5) Найдем касательное ускорение точки M,
6) Найдём нормальное ускорение точки M ,
7) Найдем радиус кривизны траектории точки М,
 ,
,
Направление векторов показано на рисунке.
Ответ:  =7.85м/ c ;
=7.85м/ c ;  = 4.93 м/ c 2 ;
= 4.93 м/ c 2 ;  =0;
=0;  = 4.93 м/ c 2 ;
= 4.93 м/ c 2 ;  м
м
7.24. Пусть точка М движется в плоскости xOy в соответствии с уравнениями  . Для момента времени
. Для момента времени  = 0,5 с найти положение точки М на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
= 0,5 с найти положение точки М на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Решение: Заданный закон движения точки в координатной форме можно рассматривать как параметрические уравнения траектории точки. Исключим время t из уравнений движения и получим уравнение траектории точки в виде:
 .
.
Таким образом, траекторией точки М является эллипс со смещенным центром, изображенный на рис. Отметим на траектории положение точки М 1 ( x 1, y 1) в момент времени t 1 = 0,5 c
 ;
;
 .
.
Вектор скорости точки представим в виде:
 ,
,
где  – орты координатных осей О x и О y ;
– орты координатных осей О x и О y ;  – проекции вектора скорости точки на координатные оси, которые равны 1-м производным от соответствующих координат по времени
– проекции вектора скорости точки на координатные оси, которые равны 1-м производным от соответствующих координат по времени
В момент времени t 1 = 0,5 c
Вектор скорости точки  строим по двум взаимно перпендикулярным проекциям
строим по двум взаимно перпендикулярным проекциям  и
и  в соответствии с выбранным масштабом
в соответствии с выбранным масштабом
 .
.
Полученный вектор должен быть направлен по касательной к траектории точки в сторону движения. Модуль скорости точки определим по уже найденным проекциям

Вектор ускорения точки представим в виде:
 ,
,
где – орты координатных осей О x и О y ;  – проекции вектора скорости точки на координатные оси, которые равны 1-м производным от проекций вектора скорости или 2-м производным от соответствующих координат по времени:
– проекции вектора скорости точки на координатные оси, которые равны 1-м производным от проекций вектора скорости или 2-м производным от соответствующих координат по времени:
В момент времени t 1 = 0,5 c
Вектор ускорения точки  строим по двум взаимно перпендикулярным проекциям
строим по двум взаимно перпендикулярным проекциям  и
и  в соответствии с выбранным масштабом
в соответствии с выбранным масштабом
 .
.
Полученный вектор ускорения точки в общем случае должен отклоняться от вектора скорости в сторону вогнутости траектории, а при движении по эллипсовидной траектории – проходить через центр эллипса. Модуль ускорения точки определим по уже найденным проекциям

Вектор полного ускорения точки можно также представить в виде геометрической суммы его проекций на оси естественной системы отсчета
 ,
,
где  и
и  – единичные орты касательной и главной нормали;
– единичные орты касательной и главной нормали;  и
и  – соответственно проекции вектора ускорения на касательную и главную нормаль. Касательную М 1 t направляем по касательной к траектории в сторону движения точки движения, а главную нормаль М1 n – перпендикулярно касательной в сторону вогнутости траектории. При вычислении касательного ускорения удобно воспользоваться формулой, устанавливающей связь между координатным и естественным способами задания движения точки
– соответственно проекции вектора ускорения на касательную и главную нормаль. Касательную М 1 t направляем по касательной к траектории в сторону движения точки движения, а главную нормаль М1 n – перпендикулярно касательной в сторону вогнутости траектории. При вычислении касательного ускорения удобно воспользоваться формулой, устанавливающей связь между координатным и естественным способами задания движения точки
 .
.
В момент времени t 1 = 0,5 c
 .
.
Значение касательного ускорения  имеет отрицательный знак, следовательно, в данный момент времени движение точки замедленное и вектор касательного ускорения
имеет отрицательный знак, следовательно, в данный момент времени движение точки замедленное и вектор касательного ускорения  направлен в противоположную сторону направлению вектора скорости точки .
направлен в противоположную сторону направлению вектора скорости точки .
Нормальное ускорение  вычислим по формуле
вычислим по формуле  , если известен радиус кривизны траектории. Например, если точка движется по окружности радиусом R, то в любой точке траектории
, если известен радиус кривизны траектории. Например, если точка движется по окружности радиусом R, то в любой точке траектории  . Если же траекторией движения точки является прямая, то
. Если же траекторией движения точки является прямая, то  , следовательно,
, следовательно,  . В данном случае радиус кривизны траектории заранее не известен, поэтому нормальное ускорение определяем по формуле:
. В данном случае радиус кривизны траектории заранее не известен, поэтому нормальное ускорение определяем по формуле:
 .
.
В момент времени t 1 = 0,5 c
 .
.
Построим векторы и  в соответствии с уже выбранным масштабом, а затем сложим их геометрически. В результате получим тот же вектор полного ускорения точки
в соответствии с уже выбранным масштабом, а затем сложим их геометрически. В результате получим тот же вектор полного ускорения точки  , который ранее уже был получен геометрической суммой составляющих и . Этот факт служит контролем правильности решения.
, который ранее уже был получен геометрической суммой составляющих и . Этот факт служит контролем правильности решения.
Радиус кривизны траектории в рассматриваемой точке определим по формуле
 .
.
В момент времени t 1 = 0,5 c
 .
.
Ответ:  =8,82 см;
=8,82 см;  =2,59 см;
=2,59 см;  =4,44 см/ c ;
=4,44 см/ c ;  =2,22 см/ c ;
=2,22 см/ c ;  =4,96 см/с;
=4,96 см/с;  =6,97 см/с 2 ;
=6,97 см/с 2 ;  =3,49 см/с 2 ;
=3,49 см/с 2 ;  =7,79 см/с 2 ;
=7,79 см/с 2 ;  =4,67 см/с 2 ;
=4,67 см/с 2 ;  =6,23 см/с 2 ; =3,95 см (радиус кривизны траектории в точке
=6,23 см/с 2 ; =3,95 см (радиус кривизны траектории в точке  ).
).
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Координатный способ задания движения точки
Введение
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы применим основные результаты этой теории к координатному способу задания движения материальной точки.
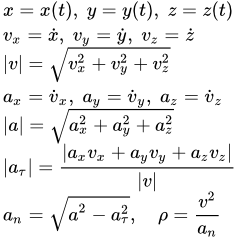
Пусть мы имеем неподвижную прямоугольную систему координат с центром в неподвижной точке . При этом положение точки M однозначно определяются ее координатами (x, y, z). Координатный способ задания движения точки – это такой способ, при котором заданы зависимости координат от времени. То есть заданы три функции от времени (при трехмерном движении):
Далее мы приводим формулы вычисления кинематических величин и пример решения задачи для координатного способа задания движения.
Определение кинематических величин
Зная зависимости координат от времени , мы автоматически определяем радиус-вектор материальной точки M по формуле:
,
где – единичные векторы (орты) в направлении осей x, y, z .
Дифференцируя по времени , находим проекции скорости и ускорения на оси координат:
;
;
Модули скорости и ускорения:
;
.
Единичный вектор в направлении касательной к траектории:
.
Его можно определить двумя способами – по направлению скорости, или в противоположную сторону. Поэтому здесь в знаменателе стоит не модуль скорости, а алгебраическая величина скорости, которая, по абсолютной величине, равна модулю скорости, но может принимать как положительные, так и отрицательные значения: . Она является проекцией скорости на направление единичного вектора .
Алгебраическая величина тангенциального (касательного) ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории:
.
Вектор тангенциального (касательного) ускорения:
.
Здесь также, как и для скорости, – это скалярная величина, которая может принимать как положительные так и отрицательные значения: .
Нормальное ускорение:
.
Вектор нормального ускорения:
; .
Единичный вектор в направлении главной нормали траектории (то есть единичный вектор, перпендикулярный касательной и направленный к центру кривизны траектории):
.
Здесь – это модуль нормального ускорения: . Нормальное ускорение всегда направлено к центру кривизны траектории. Оно не может быть направлено в противоположную сторону.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Пример решения задачи
Определение скорости и ускорения точки по заданным уравнениям ее движения
По заданным уравнениям движения точки установить вид ее траектории и для момента времени найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Уравнения движения точки:
, см;
, см.
Решение
Определение вида траектории
Исключаем время из уравнений движения. Для этого перепишем их в виде:
; .
Применим формулу:
.
;
;
;
.
Итак, мы получили уравнение траектории:
.
Это уравнение параболы с вершиной в точке и осью симметрии .
Поскольку
, то
; или
.
Аналогичным образом получаем ограничение для координаты :
;
;
Таким образом, траекторией движения точки является дуга параболы
,
расположенная при
и .
Строим параболу по точкам.
| 0 | 6 |
| ± 3 | 5,625 |
| ± 6 | 4,5 |
| ± 9 | 2,625 |
| ± 12 | 0 |
Определяем положение точки в момент времени .
;
.
Определение скорости точки
Дифференцируя координаты и по времени , находим компоненты скорости.
.
Чтобы продифференцировать , удобно применить формулу тригонометрии:
. Тогда
;
.
Вычисляем значения компонент скорости в момент времени :
;
.
Модуль скорости:
.
Определение ускорения точки
Дифференцируя компоненты скорости и по времени , находим компоненты ускорения точки.
;
.
Вычисляем значения компонент ускорения в момент времени :
;
.
Модуль ускорения:
.
Алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории. Выберем направление совпадающим с направлением скорости . Тогда ; алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление скорости :
.
Поскольку , то вектор тангенциального ускорения направлен противоположно скорости .
Нормальное ускорение:
.
Вектор и направлен в сторону центра кривизны траектории.
Радиус кривизны траектории:
.
Траекторией движения точки является дуга параболы
; .
Скорость точки: .
Ускорение точки: ; ; .
Радиус кривизны траектории: .
Определение остальных величин
При решении задачи мы нашли:
вектор и модуль скорости:
; ;
вектор и модуль полного ускорения:
; ;
тангенциальное и нормальное ускорения:
; ;
радиус кривизны траектории: .
Определим остальные величины.
Единичный вектор в направлении касательной к траектории:
.
Вектор тангенциального ускорения:
.
Вектор нормального ускорения:
.
Единичный вектор в направлении главной нормали:
.
Координаты центра кривизны траектории:
.
Введем третью ось системы координат перпендикулярно осям и . В трехмерной системе
; .
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 22-02-2016 Изменено: 29-01-2020
Кинематический способ определения радиуса кривизны траектории в теоретической механике
Кинематический способ определения радиуса кривизны траектории:
При решении многих технических задач возникает необходимость знать радиус кривизны р (или

Отсюда

Скорость  точки определяется по формуле
точки определяется по формуле
Следовательно,

Числовое значение нормального ускорения а„ входит в выражение полного ускорения точки
откуда 
где квадрат полного ускорения 
и касательное ускорение
Таким образом, если закон движения точки задан уравнениями 
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:

2. Подставив в (б’) выражения  найти
найти 
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение  а затем а?.
а затем а?.
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения

5. Подставив в (г) выражения 
6. Подставить в (в) значения
7. Подставив в (а) найденные значения  получить радиус кривизны р.
получить радиус кривизны р.
Задача:
Движение точки задано уравнениями 
(х, у—в см, t — в сек). Определить радиус кривизны траектории в те моменты, когда она пересекает ось Ох.
1. В те моменты, когда траектория пересекает ось Ох, ордината у—0. Поэтому, подставив во второе уравнение движения значение у = 0, получим
Отсюда [решая уравнение относительно 
 находим, что траектория пересекает ось Ох в моменты времени
находим, что траектория пересекает ось Ох в моменты времени
2. Находим выражения проекций скорости:

Как видно, проекция скорости на ось Ох — постоянная величина (не зависит от времени).
3. Определяем значение этих проекций в моменты пересечения траекторией оси Ох:
4. Числовое значение скорости точки в моменты пересечения траекторией оси Ох в данном случае одинаковы

5. Находим касательное ускорение точки. Для этого получим общее выражение (уравнение) скорости, воспользовавшись зависимостью (б):
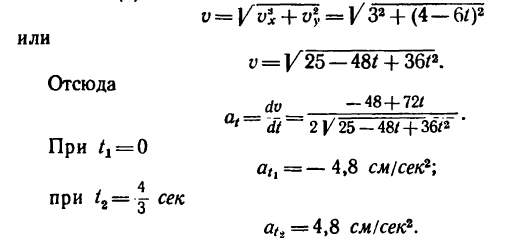
6. Находим проекции полного ускорения точки:

Следовательно, в данном случае полное ускорение точки — постоянная величина. Причем

7. Определяем нормальное ускорение точки. Как при 
так и при 

8. Зная, что в моменты пересечения траекторией оси  5 см:сек и
5 см:сек и  находим радиусы кривизны траектории в этих точках:
находим радиусы кривизны траектории в этих точках:

Решение этой задачи рекомендуется самостоятельно иллюстрировать чертежом, изобразив на нем траекторию точки, векторы скорости  и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы
и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы 
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Равномерное вращательное движение
- Равнопеременное вращательное движение
- Неравномерное вращательное движение
- Плоскопараллельное движение тела
- Равномерное криволинейное движение точки
- Равнопеременное движение точки
- Неравномерное движение точки по любой траектории
- Определение траектории, скорости и ускорения точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://1cov-edu.ru/mehanika/kinematika/tochki/koordinatnyj-sposob-zadaniya-dvizheniya/
http://www.evkova.org/kinematicheskij-sposob-opredeleniya-radiusa-kriviznyi-traektorii-v-teoreticheskoj-mehanike