Дифференциальное уравнение движения при затухающих колебаниях
§6 Затухающие колебания
Декремент затухания. Логарифмический декремент затухания.
Добротность
Свободные колебания технических систем в реальных условиях протекают, когда на них действуют силы сопротивления. Действие этих сил приводит к уменьшению амплитуды колеблющейся величины.
Колебания, амплитуда которых из-за потерь энергии реальной колебательной системы уменьшается с течением времени, называются затухающими.
Наиболее часто встречается случаи, когда сила сопротивления пропорциональна скорости движения

где r — коэффициент сопротивления среды. Знак минус показывает, что FC направлена в сторону противоположную скорости.
Запишем уравнение колебаний в точке, колеблющийся в среде, коэффициент сопротивлений которой r . По второму закону Ньютона




где β — коэффициент затухания. Этот коэффициент характеризует скорость затухания колебаний, При наличии сил сопротивления энергия колеблющейся системы будет постепенно убывать, колебания будут затухать.

— дифференциальное уравнение затухающих колебаний.

— у равнение затухающих колебаний.
ω – частота затухающих колебаний:

Период затухающих колебаний:

 Затухающие колебания при строгом рассмотрении не являются периодическими. Поэтому о периоде затухаюших колебаний можно говорить, когда β мало.
Затухающие колебания при строгом рассмотрении не являются периодическими. Поэтому о периоде затухаюших колебаний можно говорить, когда β мало.
Если затухания выражены слабо (β→0), то  . Затухающие колебания можно
. Затухающие колебания можно
рассматривать как гармонические колебания, амплитуда которых меняется по экспоненциальному закону

В уравнении (1) А0 и φ0 — произвольные константы, зависящие от выбора момента времени, начиная е которого мы рассматриваем колебания

Рассмотрим колебание в течение, некоторого времени τ, за которое амплитуда уменьшится в е раз





τ — время релаксации.
Коэффициент затихания β обратно пропорционален времени, в течение которого амплитуда уменьшается в е раз. Однако коэффициента затухания недостаточна для характеристики затуханий колебаний. Поэтому необходимо ввести такую характеристику для затухания колебаний, в которую входит время одного колебаний. Такой характеристикой является декремент (по-русски: уменьшение) затухания D , который равен отношению амплитуд, отстоящих по времени на период:

Логарифмический декремент затухания равен логарифму D :


Логарифмический декремент затухания обратно пропорционален числу колебаний, в результате которых амплитуда колебаний уменьшилась в е раз. Логарифмический декремент затухания — постоянная для данной системы величина.
Еще одной характеристикой колебательной система является добротность Q .

Добротность пропорциональна числу колебаний, совершаемых системой, за время релаксации τ.
Добротность Q колебательной системы является мерой относительной диссипации (рассеивания) энергии.
Добротность Q колебательной системы называется число, показывающее во сколько раз сила упругости больше силы сопротивления.

Чем больше добротность, тем медленнее происходит затухание, тем затухающие колебания ближе к свободным гармоническим.
§7 Вынужденные колебания.
Резонанс
В целом ряде случаев возникает необходимость создания систем, совершающих незатухающие колебания. Получить незатухающие колебания в системе можно, если компенсировать потери энергии, воздействуя на систему периодически изменяющейся силой.

Запишем выражение для уравнения движения материальной точки, совершающей гармоническое колебательное движение под действием вынуждающей силы.
По второму закону Ньютона:




 (1)
(1)
— дифференциальное уравнение вынужденных колебаний.
Это дифференциальное уравнение является линейным неоднородным.
Его решение равно сумме общего решения однородного уравнения и частного решения неоднородного уравнения:


Найдем частное решение неоднородного уравнения. Для этого перепишем уравнение (1) в следующем виде:
 (2)
(2)
Частное решение этого уравнения будем искать в виде:




т.к. выполняется для любого t , то должно выполняться равенство γ = ω , следовательно,

Это комплексное число удобно представить в виде

где А определяется по формуле (3 ниже), а φ — по формуле (4), следовательно, решение (2),в комплексной форме имеет вид

Его вещественная часть, являвшаяся решением уравнения (1) равна:


 (3)
(3)
 (4)
(4)
Слагаемое Хо.о. играет существенную роль только в начальной стадии при установлении колебаний до тех пор, пока амплитуда вынужденных колебаний не достигнет значения определяемого равенством (3). В установившемся режиме вынужденные колебания происходят с частотой ω и являются гармоническими. Амплитуда (3) и фаза (4) вынужденных колебаний зависят от частоты вынуждающей силы. При определенной частоте вынуждающей силы амплитуда может достигнуть очень больших значений. Резкое возрастание амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к собственной частоте механической системы, называется резонансом.
 Частота ω вынуждающей силы, при которой наблюдается резонанс, называется резонансной. Для того чтобы найти значение ωрез, необходимо найти условие максимума амплитуды. Для этого нужно определить условие минимума знаменателя в (3) (т.е. исследовать (3) на экстремум).
Частота ω вынуждающей силы, при которой наблюдается резонанс, называется резонансной. Для того чтобы найти значение ωрез, необходимо найти условие максимума амплитуды. Для этого нужно определить условие минимума знаменателя в (3) (т.е. исследовать (3) на экстремум).



Зависимость амплитуды колеблющейся величины от частоты вынуждающей силы называется резонансной кривой. Резонансная кривая будет тем выше, чем меньше коэффициент затухания β и с уменьшением β, максимум резонансных кривых смешается вправо. Если β = 0, то
При ω→0 все кривые приходят к значению  — статическое отклонение.
— статическое отклонение.

Параметрический резонанс возникает в том случае, когда периодическое изменение одного из параметров система приводит к резкому увеличению амплитуды колеблющейся системы. Например, кабины, делающие «солнышко» за счет изменения положения центра тяжести система.(То же в «лодочках».) См. §61 .т. 1 Савельев И.В.
Затухающие колебания в контуре и их уравнение
Существуют колебания в системе без источника энергии, называемые затухающими. Рассмотрим реальный контур с сопротивлением не равным нулю. Для примера используют контур с включенным сопротивлением R , с емкостью конденсатора C , с катушкой индуктивности L , изображенный на рисунке 1 . Колебания, происходящие в нем, — затухающие.
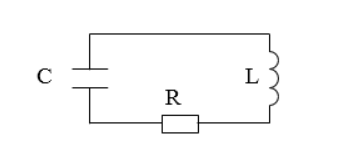
Именно наличие сопротивления становится главной причиной их затухания. Данный процесс возможен посредствам потерь энергии на выделение джоулева тепла. Аналог сопротивления в механике – действие сил трения.
Характеристики затухающих колебаний
Затухающие колебания характеризуют коэффициентом затухания β . Применив второй закон Ньютона, получим:
m a = — k x — y v , d 2 x d t 2 + r m d x d t + k m x = 0 , ω 0 2 = k m , β = r 2 m .
Из записи видно, что β действительно является характеристикой контура. Реже вместо β применяют декремент затухания δ ,
Значение a ( t ) является амплитудой заряда, силы тока и так далее, δ равняется количеству колебаний, а N e — период времени уменьшения амплитуды в e раз.
Для R L C контура применима формула с ω частотой.
При небольшой δ ≪ 1 говорят, что β ≪ ω 0 ω 0 = 1 L C — собственная частота, отсюда ω ≈ ω 0 .
При рассмотрении затухающих колебаний последовательного контура колебательный контур характеризуется добротностью Q :
Q = 1 R L C = ω 0 L R , где R , L и C — сопротивление, индуктивность, емкость, а ω 0 — частота резонанса. Выражение L C называют характеристическим или волновым сопротивлением. Для параллельного контура формула примет вид:
Q = R L C = R ω 0 L .
R является входным сопротивлением параллельного контура.
Эквивалентное определение добротности применяется при слабых затуханиях. Его выражают через отношение энергий:
Q = ω 0 W P d = 2 π f 0 W P d , называемое общей формулой.
Уравнения затухающих колебаний
Рассмотрим рисунок 1 . Изменение заряда q на конденсаторе в таком контуре описывается дифференциальным уравнением:
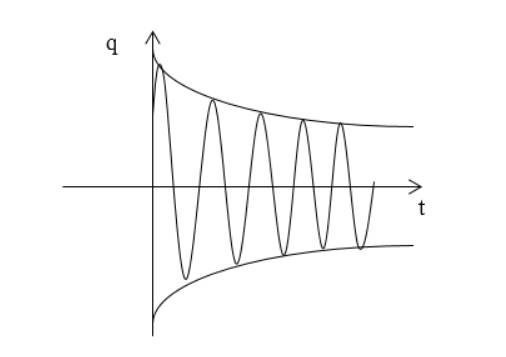
q ( t ) = q 0 e ( — β t ) cos ω t + a ‘ 0 = q 0 e — β t cos ( ω t ) .
Если t = 0 , то заряд конденсатора становится равным q 0 , и ток в цепи отсутствует.
Если R > 2 L C изменения заряда не относят к колебаниям, разряд называют апериодическим.
Значение сопротивления, при котором колебания превращаются в апериодический разряд конденсатора, критическое R k .
Функция изображается аналогично рисунку 2 .
Записать закон убывания энергии, запасенной в контуре W ( t ) при W ( t = 0 ) = W 0 с затухающими колебаниями. Обозначить коэффициент затухания в контуре β , а собственную частоту — ω 0 .
Решение
Отправная точка решения – это применение формулы изменения заряда на конденсаторе в R L C — контуре:
q ( t ) = q 0 e ( — β t ) cos ω t + a ‘ 0 = q 0 e — β t cos ( ω t ) .
Предположим, что при t = 0 , a ‘ 0 = 0 . Тогда применим выражение
Для нахождения I ( t ) :
I ( t ) = — ω 0 q 0 e ( — 2 β t ) sin ( ω t + α ) , где t g α = β ω .
Очевидно, что электрическая энергия W q запишется как:
W q = q 2 2 C = q 0 2 2 C e ( — 2 β t ) cos 2 ( ω t ) = W 0 e ( — 2 β t ) cos 2 ( ω t ) .
Тогда значение магнитной энергии контура W m равняется:
W m = L 2 ω 0 2 q 0 2 e ( — 2 β t ) sin 2 ω t + a = W 0 e — 2 β t sin 2 ω t + a .
Запись полной энергии будет иметь вид:
W = W q + W m = W 0 e ( — 2 β t ) ( cos 2 ( ω t ) + sin 2 ( ω t + a ) ) = = W 0 e ( — 2 β t ) 1 + β ω 0 sin ( 2 ω t + α ) .
Где sin α = β ω 0 .
Ответ: W ( t ) = W 0 e ( — 2 β t ) 1 + β ω 0 sin ( 2 ω t + a ) .
Применив результат предыдущего примера, записать выражение для энергии, запасенной в контуре W ( t ) , при медленно затухающих колебаниях. Начертить график убывания энергии.
Решение
Если колебания в контуре затухают медленно, то:
Очевидно, выражение энергии, запасенной в контуре, вычислим из
W ( t ) = W 0 e ( — 2 β t ) 1 + β ω 0 sin ( 2 ω t + a ) , предварительно преобразовав до W ( t ) = W 0 e ( — 2 β t ) .
Такое упрощение возможно по причине выполнения условия β ω 0 ≪ 1 , sin ( 2 ω t + a ) ≤ 1 , что означает β ω 0 sin ( 2 ω t + a ) ≪ 1 .
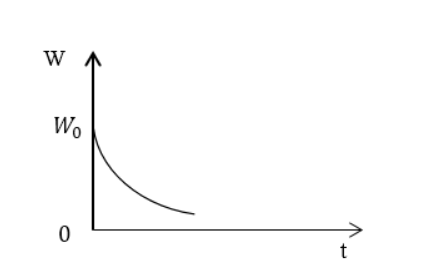
Ответ: W ( t ) = W 0 e ( — 2 β t ) . Энергия в контуре убывает по экспоненте.
Дифференциальное уравнение затухающих колебаний
Во всякой реальной колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. В наиболее часто встречающемся случае сила сопротивления F пропорциональна величине скорости.
 . (20.1)
. (20.1)
гдеr — коэффициент сопротивления среды. Знак минус обусловлен тем, что сила трения и скорость имеют противоположные направления.
При наличии сил сопротивления второй закон Ньютона, имеет вид:
 . (20.2)
. (20.2)
Применив обозначения:  , и
, и  получим дифференциальное уравнение затухающих колебаний:
получим дифференциальное уравнение затухающих колебаний:
 , (20.3)
, (20.3)
где δ –коэффициент затухания, он определяет, как быстро амплитуда колебаний уменьшается до нуля, ω0– собственная частота колебаний – частота, с которой совершались бы свободные колебания системы при отсутствии сопротивления среды.
Свободные затухающие колебания – колебания, амплитуда которых уменьшается с течением времени из-за потерь энергии реальной колебательной системы.
Решением уравнения (20.3) является выражение
 , (20.4)
, (20.4)
ω–циклическая частота затухающих колебаний, которая связана с собственной частотой соотношением
 . (20.5)
. (20.5)
При подстановке значения коэффициента затухания в формулу (20.5) получим
 . (20.6)
. (20.6)
Из уравнения (20.3) видно, что амплитуда А изменяется по экспоненциальному закону:
 , (20.7)
, (20.7)
где А0— начальная амплитуда,А — амплитуда затухающих колебаний.
Зависимость (20.4).показана на рис.20.1 сплошной линией. А пунктирными линиями показаны пределы, в которых находятся смещения колебаний точки х. или функция изменения амплитуды описанная уравнением (20.7).
Промежуток времени t= 1/d— в течение, которого амплитуда затухающих колебаний уменьшается в ераз, называется – временем релаксации.
 |
| Рис.20.1 |
Затухающие колебания не являются периодическими, и строго говоря, к ним не применимо понятие периода или частоты. Однако, при малых затуханиях можно условно пользоваться понятием периода как промежутка времени между двумя последующими максимумами колеблющейся физической величины, тогда период затухающих колебаний с учетом формулы (20.6) определяется как:
 . (20.8)
. (20.8)
Если амплитуды двух последовательных колебаний A(t) и A(t+T) отличаются на период, то их отношение называется декрементом затухания.
 (20.9)
(20.9)
логарифм данного выражения называется – логарифмическим декрементом затухания θ
 , (20.10)
, (20.10)
Ne-—число колебаний, совершаемых за время уменьшения амплитуды в е раз.
Для данной колебательной системы логарифмический декремент затухания величина постоянная.
Для характеристики колебательной системы пользуются понятием добротности Q, которая при малых значениях логарифмического декремента равна:
 . (20.11)
. (20.11)
Из формулы (20.12) следует, что добротность пропорциональна числу колебаний Ne совершаемых системой за время релаксации.
Например, добротность пружинного маятника
 . (20.12)
. (20.12)
При увеличении коэффициента затухания период затухающих колебаний растет и при δ = ω0 превращается в бесконечность, т.е. движение перестает быть периодическим. Колеблющаяся величина стремится к нулю, процесс не будет колебательным. Такой процесс называется апериодическим.
При условии  (т.е. выполняется соотношение ω0
(т.е. выполняется соотношение ω0
δ) колебательная система приходит в состояние равновесия за самое короткое время. Такое явление называется демпфированием. Примерами систем, в которых демпфирование оказывается полезным, являются устройства для закрывания дверей и амортизаторы автомобилей. Обычно их конструируют таким образом, чтобы затухание было критическим (демпфированным). Однако по мере износа этих устройств демпфирование ослабляется, двери начинают хлопать, автомобиль раскачивается, наезжая на неровности дороги. Явление демпфирования применяется при проектировке инерциальных ремней безопасности – в автомобилях. Эта идея также может быть внедрена в виде поясов безопасности для выполнения наружных высотных, ремонтных и строительных работ (т.к. в настоящее время возникает потребность внедрения новой строительной специальности – городской альпинизм).
За последнее десятилетие произошел сдвиг в отношении проектировщиков к учету взаимодействия сооружений с грунтовыми основаниями. Практически во всех проектах в той или иной форме принимается во внимание податливость основания.
Наиболее распространенный подход к моделированию взаимодействия сооружений с грунтом — “платформенная модель”. Суть его состоит в том, что сейсмическое воздействие подается на жесткую платформу, на которой с помощью определенного подвеса закреплена модель сооружения. Обычно этот подвес включает в себя распределенные пружины и демпферы. Преимущество “платформенной модели”- возможность проведения ее расчета с помощью тех же программ, что и расчета сооружения на жестком основании.
Для сооружений на жестких фундаментах поверхностного заложения и для вертикально распространяющихся сейсмических волн в горизонтально-слоистой среде такая модель является точной при том дополнительном условии, что жесткостные и демпфирующие свойства (способность к затуханию вынужденных колебаний) подвеса точно моделируют динамические характеристики штампа на грунтовом основании. Считается, что для основания в виде однородного полупространства динамические характеристики (жесткости) с достаточной точностью могут быть представлены пружинами, а демпфирующие — вязкими демпферами.
В общем случае свойства пружин и демпферов, моделирующих динамические жесткости основания в виде жесткого штампа с линейными свойствами как функции частоты. Однако пока в большинстве расчетов за основу берется статическая жесткость штампа (иногда она определяется достаточно изощренными методами), а демпфирование учитывается либо заданием модальных коэффициентов на уровне примерно 5 %, либо постановкой так называемых “акустических” не отражающих границ (распределенных демпферов).
Существует много способов искусственного введения трения в систему. Это может быть осуществлено, например, электрическим способом, однако возможны и чисто механические методы демпфирования. Вот некоторые из них:
1. Вязкое трение в жидкости. Простым примером является гидравлический демпфер, который состоит из поршня, перемещающегося в цилиндре; трение возникает при перетекании жидкости (часто вместо жидкости используется воздух) в тонком зазоре между поршнем и стенкой цилиндра. В некоторых других устройствах используются лопасти, движущиеся в масле или силиконовой жидкости.
2. Материалы с высоким уровнем рассеяния энергии. При ударе по «колоколу», изготовленному из специального сплава меди и марганца, вместо звона слышится глухой стук. В амортизирующих опорах часто используют резину; это отчасти связано с ее высокими демпфирующими характеристиками. Лопатки компрессоров газовых турбин иногда изготавливают из волокнистых полимерных материалов, обладающих значительным внутренним трением.
3. Демпфирующие покрытия панелей. Существуют такие вещества, что если нанести их на поверхность металлической панели, то при ударе по панели вместо характерного для металлов звука слышен глухой стук.
4. Сухое трение, возникающее при взаимном скольжении поверхностей в процессе вибрации. Этот способ используется, например, в некоторых компрессорах газовых турбин, где осуществлено шарнирное крепление лопаток к ротору. Кроме того, в некоторые пружины с целью демпфирования вставляются пучки металлической проволока.
5. Слоистые конструкции. Панели, состоящие из тонких металлических листов, разделенных тонким слоем вязкоупругого материала, обладают хорошими звукоизолирующими свойствами.
6. Пенопластовые или резиновые прокладки. Яйцо или электрическую лампочку, тщательно упакованные в подходящий материал, можно без всякого риска бросать с большой высоты на твердый пол.
Вынужденные колебания
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы с циклической частотой ω
 . (20.13)
. (20.13)
В данном случае с учетом силы (20.13) уравнение движения (20.2) будет иметь вид:
 . (20.14)
. (20.14)
После деления на m и преобразования (20.3) получим неоднородное дифференциальное уравнение второго порядка:
 , (20.15)
, (20.15)
где ω – частоты вынуждающей силы.
Решение такого неоднородного уравнения равно сумме общего решения однородного уравнения и частного решения неоднородного уравнения. Общее решение записывается в виде:
 , (20.16)
, (20.16)
где  .
.
Частное решение имеет вид:
 , (20.17)
, (20.17)
где А— амплитуда вынужденных колебаний.
Для определения амплитуды вынужденных колебаний А и сдвига фазы φ в уравнение (20.15) подставим значения первой и второй производной уравнения (20.17). Для начала продифференцируем:
 (20.18)
(20.18)
Подставляя (20.18) в (20.16) и после некоторых математических преобразований, и применяя метод векторных диаграмм, получим значение амплитуды вынужденного колебания А и сдвига фазы φ:
 , (20.19)
, (20.19)
 . (20.20)
. (20.20)
Из уравнения (20.19) видно, что амплитуда вынужденных колебания зависит от амплитуды вынуждающей силы. Подставим значения А и φ из уравнений (20.19) и (20.20) в уравнение (20.17) и запишем частное решение неоднородного уравнения для вынужденных электромагнитных колебаний:
 . (20.21)
. (20.21)
График вынужденных колебаний представлен на рис.20.2. Решение неоднородного дифференциального уравнения второго порядка (20.15) состоит из двух слагаемых. Слагаемое общего решения (20.16) играет заметную роль только в начальной стадии процесса при установлении колебаний. В дальнейшем этим слагаемым можно пренебречь т.к. оно содержит член е — d t . Т.о. вынужденные колебания описываются функцией гармонических колебаний (20.21) с частотой равной частоте ω вынуждающей силы F. Для данной колебательной системы с известной частотой и коэффициентом затухания амплитуда вынужденных колебаний (20.19) зависит от амплитуды и частоты вынуждающей силы.
 |
| Рис.20.2. |
Одним из видов вынужденных колебаний являются вибрации, которые сопровождают нас повсюду и в большинстве случаев эти вибрации являются нежелательными. В первую очередь можно назвать вибрации и колебания авто и железнодорожного транспорта, моторов и станков, нефтяных и газовых платформ, зданий и сооружений в зоне повышенной сейсмической опасности. Во всех случаях стоит задача изоляции от источника вибраций. Несмотря на все конструкционные различия суть системы вибраций одинакова. Пассивная система состоит из пружины и демпфера. Пружина призвана смягчить вибрации и толчки, а демпфер погасить возникшие в системе колебания. Активная система использует также дополнительную пару, состоящую из акселерометра и электромагнитного привода, что позволяет достигнуть исключительную высокую степень виброизоляции.
http://zaochnik.com/spravochnik/fizika/elektromagnitnye-kolebanija-volny/zatuhajuschie-kolebanija-v-konture/
http://zdamsam.ru/a6999.html