Криволинейное движение материальной точки в теоретической механике
Содержание:
Криволинейное движение материальной точки:
В случае криволинейного движения по плоскости имеется два дифференциальных уравнения движения точки в декартовой системе координат, а в общем случае движения в пространстве— система трех дифференциальных уравнений. Дифференциальные уравнения криволинейного движения точки интегрируются сравнительно просто, если каждое из этих уравнений интегрируется независимо от других уравнений и при этом возможен один из трех рассмотренных случаев зависимости проекции равнодействующей силы от времени, координаты и скорости.
Рассмотрим примеры криволинейного движения точки в плоскости и в пространстве:
Пример 1. Материальная точка массой 
Определить уравнения движения точки и уравнение ее траектории в координатной форме.
Решение:
Пусть в момент  движущаяся точка имеет координаты
движущаяся точка имеет координаты  и
и  . Прикладываем к точке силу
. Прикладываем к точке силу  и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:
и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:

дифференциальные уравнения принимают форму

Для интегрирования этих уравнений можно применить подстановки
или интегрировать их как линейные дифференциальные уравнения с постоянными коэффициентами. Выполним интегрирование уравнений, используя подстановки. Имеем
Аналогично для  получаем
получаем
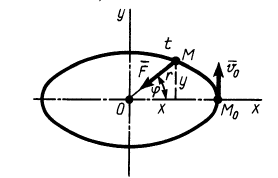
Рис. 11


Эти дифференциальные уравнения интегрируем путем разделения переменных. Получаем
Выполняя интегрирование и подставляя пределы, имеем


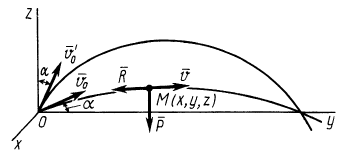
Рис. 12
и уравнения движения точки принимают вид

Возводя в квадрат  и
и  , получаем уравнение траектории точки в координатной форме:
, получаем уравнение траектории точки в координатной форме:

Траекторией точки оказался эллипс с полуосями  и
и  .
.
Пример 2. Материальная точка массой  (рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью
(рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью  под углом
под углом  к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.
к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.  , где
, где  — постоянный коэффициент пропорциональности.
— постоянный коэффициент пропорциональности.
Решение:
Задачу удобно решать в прямоугольной декартовой системе координат, начало которой находится в точке бросания, а ось  направлена по вертикали вверх. Оси
направлена по вертикали вверх. Оси  и
и  при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость
при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость  располагается в плоскости
располагается в плоскости  . Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент
. Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент  , когда координаты точки
, когда координаты точки  и их первые производные по времени положительны. На точку действуют две силы: сила тяжести
и их первые производные по времени положительны. На точку действуют две силы: сила тяжести  , направленная по вертикали вниз, и сила сопротивления
, направленная по вертикали вниз, и сила сопротивления  , направление которой противоположно направлению скорости
, направление которой противоположно направлению скорости  . Равнодействующая сила
. Равнодействующая сила
причем  .
.
Для проекций равнодействующей силы  на оси координат, считая, что в выбранном положении точки и положительных значениях
на оси координат, считая, что в выбранном положении точки и положительных значениях  , имеем
, имеем
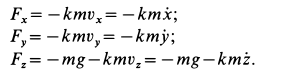
Знак минус у проекций силы сопротивления указывает на то, что их знаки противоположны знакам проекций скорости, принятым положительными.
Дифференциальные уравнения движения точки имеют вид

При сделанном выборе осей координат имеем следующие начальные условия:

Каждое дифференциальное уравнение системы в рассматриваемом случае можно интегрировать отдельно, независимо от других уравнений. После сокращения на т дифференциальные уравнения примут вид

Разделяя переменные и интегрируя каждое из уравнений системы, получаем:

После потенцирования имеем:

Подставляя в (г) начальные значения для  , получаем уравнения для определения произвольных постоянных
, получаем уравнения для определения произвольных постоянных  :
:

Постоянные интегрирования имеют следующие значения:

После подстановки постоянных интегрирования в (г) и замены проекций скорости на оси координат производными от координат по времени получаем

Разделяя в (г’) переменные и интегрируя каждое дифференциальное уравнение первого порядка, имеем

Подставляя в (д) начальные условия, получаем уравнения для определения постоянных интегрирования  :
:


Подставляя значения постоянных в (д), получаем искомые уравнения движения точки:
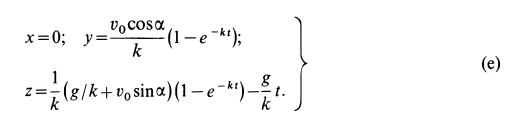
Проведем некоторые исследования движения точки. Из уравнений движения (е) путем предельного перехода при  , стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае
, стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае  , раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для
, раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для  получаем
получаем
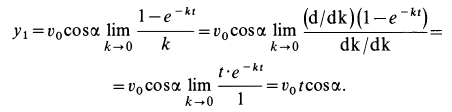
Прежде чем переходить к пределу в  , преобразуем его к виду
, преобразуем его к виду

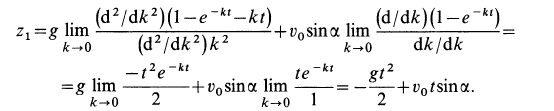
Получаем следующие уравнения движения точки под действием одной силы тяжести:

Если из этих уравнений исключить время  , то получим уравнения траектории точки в координатной форме (рис. 12):
, то получим уравнения траектории точки в координатной форме (рис. 12):

Траекторией точки является парабола, расположенная в плоскости  .
.
Если в (ж) принять  , то
, то  при этом окажется горизонтальной дальностью
при этом окажется горизонтальной дальностью  , которая определяется по формуле
, которая определяется по формуле

Из (з) следует, что наибольшая горизонтальная дальность получается при угле бросания  :
:
При других углах бросания  одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом
одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом  к горизонту или под тем же углом
к горизонту или под тем же углом  к вертикали с той же самой скоростью
к вертикали с той же самой скоростью  .
.
Криволинейное движение точки
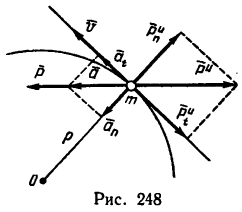
Как известно из кинематики, при движении материальной точки по криволинейной траектории ее ускорение  имеет два составляющих ускорения:
имеет два составляющих ускорения:  — касательное (тангенциальное) и
— касательное (тангенциальное) и  — — нормальное (центростремительное).
— — нормальное (центростремительное).
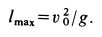
Из динамики уже известно, что ускорение  , приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая
, приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая  этой системы и ускорение
этой системы и ускорение  (рис. 248) находятся в зависимости, выражающей основной закон динамики точки:
(рис. 248) находятся в зависимости, выражающей основной закон динамики точки:

Если уравновесить силу  приложением к точке силы инерции
приложением к точке силы инерции  , а затем разложить ее на две составляющие
, а затем разложить ее на две составляющие  соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:
соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:

В задачах на криволинейное движение точки в основном рассматривается нормальная (центробежная) сила инерции 
Числовое значение нормальной (центробежной) силы инерции можно выражать следующими формулами:

Заменим здесь

Если материальная точка, рассматриваемая в задаче, связана с каким-либо вращающимся телом, то скорость точки удобнее выражать через угловую скорость тела  и тогда
и тогда

Если в последней формуле выразить массу точки через ее вес  , а угловую скорость — в об. мин
, а угловую скорость — в об. мин  то
то 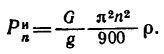
Здесь  поэтому формуле можно придать такой вид
поэтому формуле можно придать такой вид
 (4)
(4)
Эта формула дает приближенное значение центробежной силы инерции, но она очень удобна при решении многих задач.
Последовательность решения задач на криволинейное движение точки при помощи метода кинетостатики та же, что в предыдущем параграфе.
Задача №1
Шарик, масса которого m= 0,5 кг, привязки к нити длиной 0,7 м. Нить вместе с шариком вращается в вертикальной плоскости, затрачивая на один оборот 1 сек. Определить натяжение шнура в моменты высшего и низшего положения шарика, считая, что скорость остается постоянной при перемещении по всей длине окружности.
1. В соответствии с условием задачи считаем, что шарик движется равномерно по окружности, радиус которой равен длине нити (r=0,7 м). Следовательно, его скорость

Оставаясь численно неизменной, скорость точки непрерывно изменяет направление, значит точка имеет нормальное ускорение

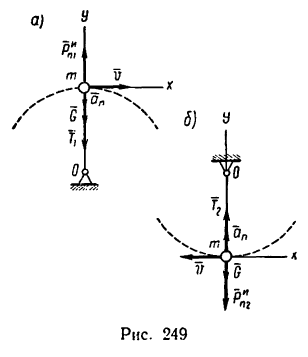
2. Рассмотрим движущийся шарик в тот момент, когда он проходит через верхнюю точку траектории (рис. 249, а).
На шарик действуют две силы: его вес  и реакция нити
и реакция нити  равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
3. Добавим к силам  силу инерции
силу инерции  направив ее в сторону, противоположную ускорению
направив ее в сторону, противоположную ускорению  Образовав таким образом уравновешенную систему сил, получим уравнение равновесия
Образовав таким образом уравновешенную систему сил, получим уравнение равновесия

4. Из уравнения разновесия находим  учитывая, что
учитывая, что 

Подставим в это уравнение числовые значения:

Таким образом, находясь в верхнем положении, двигающийся шарик натягивает пить силой 8,9 н, что соответствует 0,91 кГ.
0,91 кГ.
Отметим, что натяжение нити будет ослабевать при уменьшении скорости движения шарика. Следовательно, для того чтобы шарик при движении в вертикальной плоскости смог пройти верхнюю точку траектории с заданным радиусом кривизны р, он должен иметь в этой точке определенную скорость.
5. Рассмотрим теперь движущийся шарик в момент прохождения нм нижней точки траектории (рис. 249,6).
В этом положении на шарик действуют также две силы: вес  и реакция нити
и реакция нити  но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №2
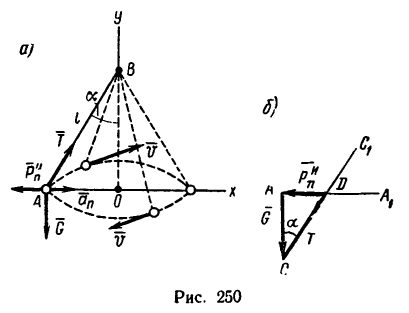
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg = 2* 9,81 =19,62 н.Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити l= 60 см = 0,6 м.
нити. Длина нити l= 60 см = 0,6 м.
Изобразим двигающийся шарик с приложенными к нему силами G и  (рис. 250,а). Так как шарик
(рис. 250,а). Так как шарик
мерно, то он имеет только
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №3
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg =  =19,62 н
=19,62 н
Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити
нити. Длина нити 

Изобразим двигающийся шарик с приложенными к нему силами  (рис. 250,а). Так как шарик мерно, то он имеет только
(рис. 250,а). Так как шарик мерно, то он имеет только
движется по окружности равно-нормальное ускорение , направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
, направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
Изображая на рис. 250 силу инерции, необходимо учитывать, что она прикладывается к шарику условно. В действительности, сила инерции, как известно, приложена к двигающему телу или к связи. В данном случае нить служит для шарика и двигающим телом (через нить шарик приводится в движение), и связью (нить одновременно и ограничивает движение шарика). Поэтому сила инерции приложена к нити и отклоняет ее су вертикали.
2. Совместив оси координат с прямыми AO и ВО и спроектировав силы на оси х и у, выведем уравнения равновесия:

3. Из уравнения (2)

4 Из уравнения (1)

Так как 
где  —искомая скорость шарика, а радиус окружности
—искомая скорость шарика, а радиус окружности 
Таким образом, натяжение нити составляет 22,7 н при скорости движения шарика 1,3 м/сек.
Решение 2—с применением графо-аналитического метода.
1. Этот вариант решения начинаем так же, как и предыдущий: изображаем шарик с действующими на него силами С = 19,62 н и искомой Т, а затем добавляем силу инерции  направленную противоположно вектору
направленную противоположно вектору  (см. рис. 250, о).
(см. рис. 250, о).
2. Силы  образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора
образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора  (рис. 250,6). Затем из точек С и A проводим соответственно линии
(рис. 250,6). Затем из точек С и A проводим соответственно линии параллельные направлениям сил
параллельные направлениям сил  (см. рис. 250,а). Прямые
(см. рис. 250,а). Прямые пересекаются в точке D и образуется векторный прямоугольный треугольник
пересекаются в точке D и образуется векторный прямоугольный треугольник  в котором
в котором 
3. Из прямоугольного треугольника ACD имеем: 
И, наконец, так же как и в первом решении, находим скорость движения шарика по окружности
Задача №4
Тонкий стержень AВ, центр тяжести которого расположен на его оси О, вращается с угловой скоростью n -3009 об, мин.
На сколько увеличится нагрузка на подшипник, в котором вращается стержень, если на одну из половинок стержня прикрепить массу m — 0,5 кг, на расстоянии р = 0,1 м от оси вращения (рис. 251,а).
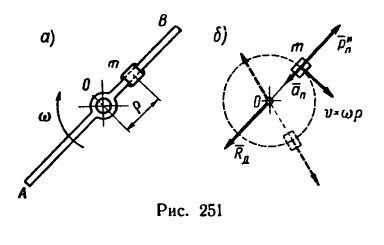
1. Стержень АВ без прикрепленной к нему массы т создает нагрузку на подшипник, равную его собственному весу. Причем, если стержень хорошо центрирован, т. е. его центр тяжести расположен точно на оси подшипника, то нагрузка при вращении не изменится — она также будет равна весу стержня и будет действовать на подшипник вертикально вниз.
2. Если к стержню, по условию задачи, прикрепить массу m, то эта масса (примем ее за материальную точку), двигаясь по окружности радиусом р = 0,1 м, начнет растягивать ту часть стержня, которая расположена между массой т и подшипником, силой, равной  Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией
Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией  (рис. 251,6).
(рис. 251,6).
3. Так как увеличение нагрузки равно возникшей силе инерции 
Подставим эти значения в формулу (3):
PJ| = 0,5 • 3142 • 0,1 =4929,8 н?«4,93 кн.
Таким образом, в результате прикрепления массы т нагрузка на подшипник увеличивается почти на 5 кн, что соответствует почти 
4. Применив формулу (4) и положив в ней 
 м, найдем силу инерции
м, найдем силу инерции  выраженную в кГ:
выраженную в кГ: 
Результат, получившийся в этой задаче, подтверждает необходимость тщательной балансировки вращающихся деталей машин. Несбалансированные детали при вращении создают огромные дополнительные динамические нагрузки, которые приводят к быстрому износу подшипников.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
- Две основные задачи динамики точки
- Прямолинейное движение точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Интегрирование дифференциальных уравнений движения материальной точки, находящейся под действием постоянных сил

Метод решения задач
Дифференциальные уравнения движения точки
Здесь мы рассмотрим движение материальной точки под действием постоянных сил. Пусть на точку массой m действуют n сил , которые постоянны на протяжении всего движения точки. Тогда удобно использовать равнодействующую , равную их векторной сумме:
.
Выберем инерциальную декартову систему координат Oxyz с началом в некоторой точке O . Закон движения точки в ней определяется вторым законом Ньютона:
(1) .
Здесь – радиус-вектор точки. То есть вектор, приведенный из начала координат O к материальной точке.
Проектируя векторное уравнение (1) на оси системы координат, получим систему дифференциальных уравнений, описывающих движение точки:
(2) .
Решение дифференциальных уравнений при действии постоянных сил
Если силы постоянны, то и их векторная сумма также постоянна. В этом случае уравнения (2) не зависят друг от друга. Поэтому каждое из этих уравнений можно решать отдельно от остальных. Рассмотрим уравнение для координаты x :
(3) .
Найдем его решение.
Разделим уравнение (3) на m и введем обозначение:
.
Тогда уравнение (3) примет более простой вид:
(4) .
Введенная нами величина является проекцией ускорения точки на ось x . В рассматриваемом нами случае постоянных сил, ускорение также постоянно.
Вторая производная координаты x по времени – это производная проекции скорости на ось x по времени. При этом применяют следующие обозначения:
(5) .
Проекция скорости на ось x – это производная координаты по времени:
(6) .
Найдем закон изменения со временем проекции скорости материальной точки на ось x : . Подставим (5) в (4):
.
Это простое дифференциальное уравнение с разделяющимися переменными. Перепишем его в следующем виде:
.
Интегрируем, используя таблицу неопределенных интегралов.
.
Здесь – постоянная интегрирования, которая определяется из начальных условий. Поскольку тоже постоянная, то, чтобы придать решению более простой вид, заменим на . В результате получим закон изменения проекции скорости на ось x :
(7) .
Как видно, скорость является линейной функцией от времени. Тот факт, что зависит от времени, можно записать так:
.
Зная значение в определенный момент времени, можно определить значение постоянной . Пусть, например, нам известно, что в начальный момент времени , проекция скорости на ось x равняется . Подставим в (7) :
.
Отсюда . Тогда закон изменения проекции скорости на ось x имеет определенный вид:
.
Теперь найдем закон изменения координаты точки x от времени: . Из (6) и (7) имеем:
;
.
Это также дифференциальное уравнение с разделяющимися переменными. Интегрируем с помощью таблицы интегралов.
.
Итак, мы получили закон изменения координаты от времени:
(8) .
Здесь – постоянные интегрирования. Их можно найти, зная скорость и координату, в какой-либо момент времени.
Пусть, например, в начальный момент времени , координата равна , и проекция скорости точки на ось x равна . Ранее мы уже нашли значение постоянной для этого случая: . Подставим в (8):
.
Подставим сюда :
.
Отсюда .
Тем самым мы получили закон изменения x координаты от времени:
.
Уравнения движения (2) для остальных переменных y и z , при постоянных силах, решаются точно так же, как и для переменной x . Далее мы приводим пример решения задачи на интегрирование дифференциальных уравнений движения материальной точки при действии на нее постоянных сил.
Задача
Условие задачи
Груз S, рассматриваемый как материальная точка массы m = 5кг, движется по шероховатой поверхности от точки A до точки B, в которой отрывается от поверхности и продолжает движение в воздухе до падения на наклонную поверхность в точке C. Движение происходит в плоскости рисунка.
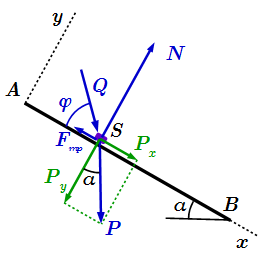
В точке A, груз имел скорость м/с. Скорость в точке B: м/с. Участок AB представляет собой плоскую поверхность с углом наклона α = 30° к горизонту. На участке AB, кроме силы тяжести и силы трения, на груз действует постоянная сила Н, направленная под углом φ = 45° к поверхности. Коэффициент трения f = 0,1 .
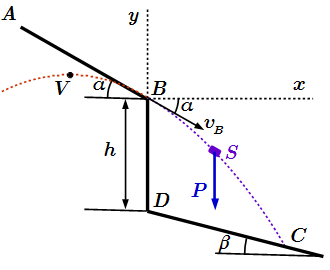
На участке BC, груз движется под действием только силы тяжести. Сопротивлением воздуха пренебречь. Поверхность, на которую падает груз, является плоской с углом наклона β = 15° к горизонту (см. рисунок). Точка D расположена ниже точки B на расстояние |BD| = h = 1 м .
Найти: Время движения на участке AB; длину этого участка; время падения от точки B к точке C; расстояние |DC|; уравнение траектории BC.
Решение задачи
1. Движение материальной точки на участке AB
1.1. Составление уравнения движения и определение ускорения
Рассмотрим движение груза S на участке AB. Как сказано в условии, его можно рассматривать как материальную точку. То есть считаем, что размерами груза можно пренебречь.
Выберем декартову систему координат с началом в точке A. Ось x направим от A к B; ось y – перпендикулярно. Пусть в начальный момент времени , груз находился в точке A.
Силы, действующие на груз S на участке AB.
Рассмотрим силы, действующие на груз, и найдем их компоненты в выбранной системе координат Axy .
1) Сила тяжести , где м/с 2 – ускорение свободного падения. Она направлена вертикально вниз. Разложим ее на составляющие вдоль координатных осей по правилу параллелограмма: (см. рисунок). Поскольку вектор перпендикулярен горизонтали, а вектор перпендикулярен поверхности AB, то угол между векторами и равен углу между горизонталью и поверхностью движения, который по условию равен α . Тогда сила тяжести имеет следующие проекции на оси выбранной системы координат:
.
2) Заданная сила . По условию, она направлена под углом φ к поверхности (см. рисунок). Находим ее компоненты в системе координат Axy :
.
3) Сила давления поверхности . Она перпендикулярна поверхности. Поэтому ее компоненты:
.
4) Сила трения . Она направлена противоположно перемещению, то есть противоположно оси x . Абсолютная величина силы трения определяется по закону Амонта – Кулона:
(AB.1) .
Ее компоненты:
.
Составляем дифференциальные уравнения движения материальной точки:
.
Здесь мы учли, что движение происходит в плоскости xy . Поэтому уравнение для z компоненты тождественно обращается в нуль. Подставляем перечисленные выше компоненты внешних сил.
(AB.2) ;
(AB.3) .
Перемещение вдоль оси y отсутствует. Это означает, что координата y точки S остается постоянной при движении на участке AB. Тогда и все ее производные по времени равны нулю. Поэтому . Тогда из (AB.3) и (AB.1) имеем:
;
.
Разделим (AB.2) на m . В результате получим дифференциальное уравнение движения точки в следующем виде:
.
Вторая производная координаты по времени есть ускорение точки. Обозначим его как . Поскольку все действующие внешние силы постоянны, то ускорение постоянно.
.
В результате уравнение движения точки примет более простой вид:
(AB.4) ,
где – ускорение точки, постоянная величина.
1.2. Интегрирование уравнений движения
Итак, мы составили дифференциальное уравнение движения материальной точки S на участке AB:
(AB.4) ,
Теперь переходим к интегрированию этого уравнения.
Разберемся с обозначениями. У нас x – это координата точки, определяющая ее положение. Скорость точки – это производная координаты по времени t :
(AB.5) .
При , точка движется в сторону возрастания координаты x : от A к B. При – в противоположную сторону.
Ускорение – это производная скорости по времени, или вторая производная координаты по времени:
.
Определяем закон изменения скорости со временем. Для этого выразим уравнение (AB.4) через скорость :
.
Это простейшее дифференциальное уравнение с разделяющимися переменными. Интегрируем его, учитывая, что – это постоянная Для этого используем таблицу неопределенных интегралов.
;
;
(AB.6) .
Здесь – постоянная интегрирования. Найдем ее значение из условия, что в начальный момент времени , груз S находился в точке A и имел скорость в направлении оси x . Подставляем в (AB.6) , :
.
Отсюда . Тогда закон изменения скорости со временем принимает следующий вид:
(AB.7) .
Определяем время движения груза на участке AB. Для удобства, обозначим моменты времени, в которых груз находился в точках A и B, как и . Поскольку, по принятому нами соглашению, , то . Подставим в (AB.7) значения для точки B: . Тогда
. Отсюда
.
Теперь найдем зависимость координаты груза x от времени. Для этого воспользуемся тем, что скорость есть производная координаты по времени (см. (AB.5)):
.
Зависимость мы уже нашли: . Подставляем и интегрируем.
;
;
;
.
Здесь – постоянная интегрирования. Найдем ее из условия, что в начальный момент времени, , груз находился в точке A, в которой . Подставляем , :
.
Отсюда .
Тем самым мы нашли закон движения точки S на участке AB:
(AB.8) .
Определяем длину участка AB. Нам известно, что в момент времени , груз находился в точке A. В момент времени – в точке B. Также нам известен закон движения точки . Это позволяет найти длину участка AB:
.
1.3. Проверка решения
Сделаем проверку. Для этого воспользуемся теоремой об изменении кинетической энергии точки. Согласно этой теореме, Изменение кинетической энергии материальной точки, при переходе из точки A в точку B, равно сумме работ всех сил, приложенных к точке на этом перемещении:
(AB.9) .
Находим сумму проекций всех сил на ось x , приложенных к грузу на участке AB:
.
Находим сумму работ всех внешних сил, произведенных при перемещении груза из точки A в точку B.
.
Находим разность кинетических энергий груза при перемещении из точки A в точку B.
.
Подставим найденные значения в (AB.9):
.
Видно, что это уравнение выполняется. Различие имеется только в последней цифре. Это связано с округлениями, производимыми при вычислениях. Значит, этот этап решения выполнен верно.
2. Движение материальной точки на участке BC
2.1. Уравнения движения и их решения
Теперь рассмотрим движение груза S на участке BC. На этом участке мы выберем новую систему координат, и новый отсчет времени. Возьмем декартову систему координат с началом в точке B. Ось Bx направим по горизонтали; ось By – вертикально вверх (см. рисунок).
Движение груза на участке BC.
Началом движения, на участке BC, является точка B. Новый отсчет времени также будем производить от этой точки. Тогда в начальный момент времени , координаты груза равны нулю:
.
Нам известна скорость груза в точке B. Она имеет абсолютное значение , заданное в условии, и направлена вдоль прямой AB. И поэтому составляет угол α с горизонтальной осью Bx. Проекции скорости на оси координат равны:
.
На груз действует только одна сила тяжести , направленная вниз. Ее абсолютное значение . Выпишем ее компоненты в рассматриваемой системе координат (проекции силы тяжести на оси x и y):
.
Составляем уравнения движения.
.
Или
.
Разделим на m :
(BC1) ;
(BC2) .
Решаем первое уравнение (BC1). Сначала найдем закон изменения проекции скорости на ось x . Для этого, как и выше, используем следующие обозначения:
.
Выразим вторую производную в уравнении (BC1) через проекцию скорости на ось x :
;
.
Интегрируем это уравнение.
;
.
Здесь – постоянная интегрирования. Получилось, что проекция скорости груза на ось x не зависит от времени. Она постоянна для всех точек на участке BC. Поскольку нам известно значение в точке B, то . Тогда
(BC3) .
Теперь находим закон изменения координаты x от времени. Для этого воспользуемся тем, что . Подставляем в (BC3) и интегрируем.
;
;
.
Определяем постоянную интегрирования из начальных условий. В точке B . Подставляем :
.
Отсюда , и мы получаем закон изменения координаты x от времени:
(BC4) .
Аналогичным образом решаем второе уравнение:
(BC2) .
Находим закон изменения проекции скорости от времени. Используем следующие обозначения для проекции ускорения на ось y :
.
Выразим уравнение (BC2) через :
;
.
Интегрируем.
;
.
Находим значение постоянной интегрирования из начальных условий. При . Подставляем :
.
Отсюда . Так мы получили закон изменения проекции скорости на ось y :
(BC5) .
Находим закон изменения координаты y от времени. Подставляем в (BC5) и интегрируем.
;
;
.
Определяем постоянную интегрирования из начальных условий. В точке B . Подставляем :
.
Отсюда . И мы получаем закон изменения координаты y от времени:
(BC6) .
2.2. Определение координат точки C
Итак, мы получили закон движения материальной точки S в виде двух уравнений.
(BC4) ;
(BC6) .
Найдем положение точки C.
Для этого нам нужно найти уравнение прямой DC. В общем виде, уравнение прямой описывается по формуле:
(BC7) .
Здесь k – это угловой коэффициент, равный тангенсу угла наклона прямой к оси x . Положительным считается направление поворота от оси x против часовой стрелки. В нашем случае угол наклона отрицательный и равен . Поэтому
.
Найдем значение коэффициента b . Воспользуемся тем, что нам известны координаты точки D, принадлежащие прямой:
.
Подставим в (BC7):
;
.
Отсюда .
Таким образом, мы нашли уравнение прямой DC:
(BC8) ,
где .
Теперь найдем координаты точки C. Для этого нам нужно найти точку пересечения кривой, заданной уравнениями (BC4)–(BC6) и прямой (BC8). Координаты точки C удовлетворяют всем этим уравнениям:
(BC4) ;
(BC6) ;
(BC8) .
Решаем систему трех уравнений (BC4), (BC6) и (BC8). Подставляем (BC4) и (BC6) в (BC8) и выполняем преобразования:
;
.
Решаем квадратное уравнение. Подставляем численные значения.
;
;
;
.
Получаем корни уравнения:
.
Положительный корень дает момент времени, в который груз оказался в точке C . Это время движения по участку BC:
.
Находим значения координат точки C. Подставим найденное значение в (BC4):
.
Значение можно получить или из уравнения (BC6), или из (BC8). Поскольку последнее проще, то используем его:
.
Расстояние между точками D и C:
.
2.3. Траектория движения точки
Выше мы получили закон движения материальной точки S в виде двух уравнений.
(BC4) ;
(BC6) .
Теперь найдем уравнение ее траектории. Для этого мы должны исключить t из уравнений (BC4) и (BC6).
Из уравнения (BC4) находим:
.
Подставляем в (BC6) и выполняем преобразования.
;
;
;
.
Это уравнение параболы. Ее вершина V находится в точке с координатами
;
.
Фокальный параметр:
.
С этими обозначениями, уравнение параболы можно записать в каноническом виде:
.
.
Траектория движения груза на участке BC представляет собой параболу
с вершиной в точке V с координатами ,
и фокальным параметром .
Автор: Олег Одинцов . Опубликовано: 13-09-2020
iSopromat.ru

Составление систем дифференциальных уравнений движения материальной точки, на которую действует некоторая система сил для определения движения точки под действием этих сил.
Пусть на материальную точку действует некоторая система сил и требуется определить движение точки под действием этих сил.
Уравнение второго закона динамики для материальной точки массой m запишется в виде
Спроецировав уравнение (1) на декартовы оси координат, получим систему из трех уравнений
В зависимости от того, что известно о движении точки, дифференциальные уравнения записывают или в декартовых или в естественных координатах.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
http://1cov-edu.ru/mehanika/dinamika-tochki/integrirovanie-du-dvizheniya-tochki-postoyannye-sily/
http://isopromat.ru/teormeh/kratkaja-teoria/differencialnye-uravnenia-dvizhenia-tochki