Дифференциальное уравнение движения системы в теоретической механике
Дифференциальное уравнение движения системы:
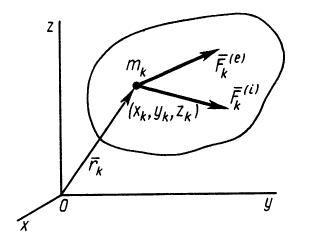
Пусть даны внешние и внутренние силы, действующие на систему, состоящую из 

Систему дифференциальных уравнений (3) называют дифференциальными уравнениями движения механической системы в векторной форме. Если спроецировать векторные дифференциальные уравнения (3) на прямоугольные декартовы оси координат, то получим систему дифференциальных уравнений, описывающих движение точек механической системы. Для нахождения движения механической системы по заданным силам и начальным условиям для каждой точки системы нужно проинтегрировать, следовательно, систему  дифференциальных уравнений. Эту задачу не удается точно решить в общем случае даже для одной точки. Она исключительно трудна в случае двух материальных точек, которые движутся только под действием сил взаимодействия по закону всемирного притяжения (задача о двух телах) и совершенно неразрешима в случае трех взаимодействующих точек (задача о трех телах).
дифференциальных уравнений. Эту задачу не удается точно решить в общем случае даже для одной точки. Она исключительно трудна в случае двух материальных точек, которые движутся только под действием сил взаимодействия по закону всемирного притяжения (задача о двух телах) и совершенно неразрешима в случае трех взаимодействующих точек (задача о трех телах).
Задача интегрирования дифференциальных уравнений механической системы еще сложнее, если на механическую систему наложены связи, силы реакций которых заранее не известны и должны быть дополнительно определены по заданным силам и связям аналогично случаю движения несвободной материальной точки по поверхности и кривой линии.
В некоторых случаях из дифференциальных уравнений движения системы можно получить первые интегралы, т. е. соотношения, в которые не входят производные второго порядка от координат по времени.
Если известны первые интегралы, то задача интегрирования системы дифференциальных уравнений облегчается. Хотя отдельные первые интегралы и не могут полностью описать движения всех точек системы, однако они иногда характеризуют важные стороны движения системы в целом.
Первые интегралы системы дифференциальных уравнений удобно получать из так называемых общих теорем динамики, когда выполняются некоторые дополнительные условия для действующих сил. Кроме того, общие теоремы динамики, даже когда по ним нельзя определить первые интегралы, дают ценную информацию о движении точки или системы. В некоторых задачах, где не требуется полного знания движения системы, эти сведения могут оказаться достаточными.
Общие теоремы динамики являются следствиями системы дифференциальных уравнений движения точки или соответственно системы точек.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
- Теорема об изменении кинетической энергии
- Потенциальное силовое поле
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Дифференциальные уравнения поступательного движения твердого тела


Дифференциальные уравнения поступательного движения твердого тела
- Из теоремы о движении центра тяжести системы получаем дифференциальное уравнение для поступательного движения твердого тела. У нас есть L / ac = EAe). Однако при перемещении твердого тела ускорение во всех точках тела одинаково по модулю и направлению, то есть ac — a.
Некоторые представления о напряженном состоянии системы в заданном направлении можно вывести из силы смещения, которую можно назвать коэффициентом жесткости в заданном положении. Людмила Фирмаль
Где a — ускорение в любой точке тела. Учитывая это, из теоремы о движении центра тяжести получено следующее дифференциальное уравнение для поступательного движения тела в векторной форме: AW-Å † Когда проецируется на оси, это выглядит так: Mx = EFL; My = bFly, Mz = ZFL.
- Это дифференциальные уравнения для поступательного движения твердого тела в проекции на декартовы оси. В этих уравнениях x, y и z являются координатами любой точки на теле, в частности, они являются координатами их центроидов. Поскольку поступательный объект имеет три степени свободы, он может составлять три дифференциальных уравнения движения.
Полное решение этой системы обыкновенных неоднородных линейных дифференциальных уравнений с постоянным коэффициентом состоит из общего решения однородных систем, полученного в задаче 18. Людмила Фирмаль
Дифференциальное уравнение для поступательного движения твердого тела аналогично дифференциальному уравнению для движения одной материальной точки. Эти уравнения могут быть использованы для решения той же проблемы, что и одна точка.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Дифференциальные уравнения поступательного движения
Основные задачи динамики твердого тела
В статике были рассмотрены условия равновесия системы сил, приложенных к абсолютно твердому телу и условия, при которых твердое тело находится в покое. Задание уравнений движения твердого тела и определение скоростей и ускорений точек твердого тела было рассмотрено в кинематике. При решении задач динамики твердого тела встают более сложные задачи, которые делятся на две основные группы. К первой группе относятся задачи, в которых по заданным уравнениям движения твердого тела требуется определить систему сил, под действием которых происходит это движение. Ко второй относятся задачи, в которых по заданным силам, действующим на тело, требуется при определенных начальных условиях найти уравнения движения тела, а для несвободного тела найти также реакции связей.

Рассмотрим движение твердого тела в плоскости. Для определения его положения требуется задать три независимых между собой параметра. Обычно это координаты центра масс  ,
,  и угол поворота
и угол поворота  , который составляет ось х с осью
, который составляет ось х с осью  на теле (рис. 4.1). Очевидно, что координаты центра масс
на теле (рис. 4.1). Очевидно, что координаты центра масс  ,
,  и угол полностью определяют положение твердого тела в плоскости.
и угол полностью определяют положение твердого тела в плоскости.
Движение тела в плоскости обычно раскладывают на простейшие: поступательное движение тела, задаваемое уравнениями движения центра масс 
 и вращение тела вокруг оси, проходящей через центр масс тела, задаваемое уравнением
и вращение тела вокруг оси, проходящей через центр масс тела, задаваемое уравнением 
Для получения законов движения воспользуемся теоремой о движении центра масс и теоремой об изменении кинетического момента.
Согласно теореме о движении центра масс (3.6), имеем
 , т.е.
, т.е.  .
.
Здесь m – масса тела,  главный вектор внешних сил. Если тело не свободно, реакции связей считаем внешними силами.
главный вектор внешних сил. Если тело не свободно, реакции связей считаем внешними силами.
Используя теорему об изменении кинетического момента относительно оси О z, перпендикулярной плоскости вращения Оху (3.18, а), имеем

Здесь  кинетический момент тела,
кинетический момент тела,  главный момент внешних сил.
главный момент внешних сил.
Итак, законы движения тела в плоскости имеют вид

 (4.1)
(4.1)
Дифференциальные уравнения поступательного движения
твердого тела
Для того, чтобы твердое тело двигалось поступательно, линия действия главного вектора внешних сил должна проходить через центр масс тела. Тогда угловая скорость и, соответственно, кинетический момент тела равны нулю.
Пусть тело движется поступательно, уравнения движения имеют вид:  , а угол
, а угол  (рис.4.1). Тогда проекции дифференциального закона, описывающего поступательное движение твердого тела в плоскости, согласно (4.1), имеют вид
(рис.4.1). Тогда проекции дифференциального закона, описывающего поступательное движение твердого тела в плоскости, согласно (4.1), имеют вид
 . (4.2)
. (4.2)
Дифференциальный закон (4.2) имеет форму закона движения материальной точки в плоскости и в общем случае позволяет решить две основные задачи динамики:
· первая задача: по заданным уравнениям движения центра масс  и
и  , вычисляя вторые производные по времени и, используя (4.2), находят проекции главного вектора внешних сил
, вычисляя вторые производные по времени и, используя (4.2), находят проекции главного вектора внешних сил  и
и  ;
;
· вторая задача: по заданным  и
и  и начальным условиям задачи (при
и начальным условиям задачи (при  заданы значения
заданы значения  ), определяют уравнения движения центра масс:
), определяют уравнения движения центра масс:  и
и  ; методы интегрирования полностью аналогичны методам интегрирования дифференциальных уравнений прямолинейного движения точки.
; методы интегрирования полностью аналогичны методам интегрирования дифференциальных уравнений прямолинейного движения точки.
http://lfirmal.com/differencialnye-uravneniya-postupatelnogo-dvizheniya-tverdogo-tela/
http://megaobuchalka.ru/15/27774.html