Дифференциальное уравнение твердого тела вокруг неподвижной оси
Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси
Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси
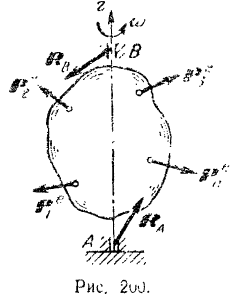
Пусть твердое тело под действием приложенных к нему внешних сил
вращается вокруг неподвижной оси (рис. 200) с угловой скоростью .
По теореме об изменении кинетического момента системы (формула (179)) имеем:
Но согласно формуле (177) кинетический момент твердого тела относительно его оси вращения равен
Подставляя это значение в предыдущее уравнение, находим:
Обозначим через главный момент всех внешних сил, приложенных к твердому телу, относительно оси :
Принимая во внимание известные из кинематики зависимости, уравнение можно придать следующую форму:
Произведении момента инерции тела относительно его оси вращения на угловое ускорение тела равно главному моменту всех приложенных телу внешних сил относительно той же оси.
Уравнение (182) называется дифференциальным уравнением вращательного движения твердого тела.
Так как момент инерции тела относительно данной оси есть величина постоянная, то, как это видно из уравнения (182). при постоянном главном моменте внешних сил угловое ускорение к есть величина постоянная. т. е. тело совершает равномерно переменное вращение.
Из того же уравнения следы, что если приложенный к телу главный момент равен нулю, то угловое ускорение тела также равно нулю, т.е. тело либо остается в покое (если оно находилось в нем до того), либо вращается с постоянной угловой скоростью.
Нетрудно заметить, что но своему виду дифференциальное уравнение (.182) вращательного движения тела напоминает основное уравнение (106) динамики для материальной точки (или, что го же, для поступательного движения тела):
В уравнении (182) вместо силы стоит главный момент внешних сил относительно оси вращения тела , вместо массы — момент инерции тела относительно оси вращения, вместо ускорения — угловое ускорение .
Из сопоставления уравнений (182) и (106) видно, что момент инерции тела играет при его вращательном движении ту же роль, что и масса тела при поступательном движении. Так же как масса тела является мерой инертности тела при его поступательном движении, так и момент инерции тела относительно данной оси является мерой инертности тела при его вращательном движении вокруг этой оси.
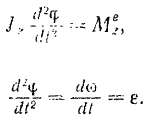
При одном и том же вращающем моменте угловое ускорение тела будет тем меньше, чем больше момент инерции тела относительно оси вращения. Существенное отличие момента инерции тела or его массы заключается, однако, в том. что масса тела является для него величиной постоянной, тогда как момент инерции тела зависит не только от самой вращающейся массы, по и от распределения этой массы относительно оси вращения. Например, одну и ту же длинную палку значительно легче привести руками в быстрое вращение вокруг ее продольной оси (рис. 201,а), чем вокруг оси, перпендикулярной к ее длине (рис. 201,6). Объясняется это тем, что в первом случае момент инерции палки
значительно меньше, чем во втором. Поэтому, для сообщения палке одинакового углового ускорения в первом случае потребуется значительно меньший вращающий момент.
Колесо с тяжелым ободом и легкой втулкой будет обладать большим моментом инерции, чем колесо той же массы, но с тяжелой втулкой и легким ободом, так как а первом случае большая часть массы находится на большем расстоянии от оси вращения. А так как чем значительнее момент инерции тела, тем труднее изменить сто движение, то этим и пользуются в маховиках, служащих для выравнивания хода машин, делая их значительного диаметра и распределяя большую часть их массы по ободу.
Уравнение (182) позволяет решать для вращательного движения тела вокруг неподвижной оси обе основные задачи динамики, т.е. позволяет: 1) зная уравнение вращения тела
и момент инерции , относительно оси вращения, находить приложенный к телу главный момент сил
и, наоборот, 2) зная приложенные к телу внешние силы, момент инерции тола и начальные условия и , находить как уравнение вращения тела, так и его угловую скорость и угловое ускорение.
Надо заметить, что если решение первой задачи, в общем случае, сводится к простому дифференцированию функции
то решение второй задачи методом интегрирования уравнения (182) может представлять значительные трудности. В общем случае, главный момент сил может быть величиной переменной, зависящей не только от времени, но еще и от угла поворота и угловой скорости тела.
Пример задачи:
Для нахождения момента сил трения в подшипниках на вал насажен маховик весом и ему сообщена угловая скорость . Предоставленный самому себе маховик останавливается через Радиус инерции маховика . Определить момент трения, считая его постоянным.
Решение:
Согласно основному уравнению (182) для вращательного движения твердого тела
Приложенный к маховику момент трения постоянен, поэтому вращение маховика будет равномерно переменным. Угловое ускорение равномерно переменного вращения определяется из формулы (89)
В нашем случае при
угловая скорость маховика
начальная же его угловая скорость
Отсюда угловая ускорение маховика
Знак минус показывает, что мы в данном случае имеем замедленное вращение.
Момент инерции маховика находим по формуле (141)
Следовательно, искомый момент трения будет равен
Знак момента трения говорит о том, чю он направлен в сторону, противоположную вращению маховика.
Пример задачи:
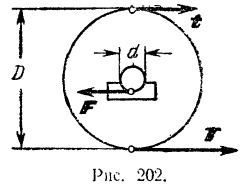
Шкив (рис. 202) получает вращение от другого ведущего! шкива при помощи ременной передачи. Ведущая ветвь ремня натянута с силой ведомая ветвь с силой . Вес шкива , его диаметр . Определить угловое ускорение шкива, принимая во внимание трение вала в подшипниках. Диаметр вала коэффициент трения . Весом вала пренебречь. Шкив считать сплошным однородным цилиндром.
Решение:
Сила трения вала в подшипниках равна
Главный момент равен алгебраической сумме всех приложенных к шкиву внешних сил относительно оси вращения тела:
Момент инерции шкива находится но формуле (145)
Зная приложенный к шкиву главный момент и его момент инерции относительно оси вращения, легко найти по дифференциальному уравнению (182) для вращательного движения тела и его угловое ускорение
Пример задачи:
Судовой винт приводится по вращение из состояния покоя приложенным к нему постоянным вращающим моментом . Момент сил сопротивлений воды, действующих на винт,
где — некоторый постоянный коэффициент. Найти, как изменяется со временем угловая скорость винта к ее предельное значение. Момент инерции винта относительно его оси вращении равен .
Решение:
Пишем дифференциальное уравнение (182) вращательного движения винта:
Разделяя переменные в этом уравнении и интегрируя его в соответствующих пределах, будем иметь:
Так как величина
убывает с течением времени, асимптотически приближаясь к нулю, то угловая скорость винта возрастает, асимптотически приближаясь к своему предельному значению
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:
Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
Дифференциальные уравнения вращения твердого тела вокруг неподвижной оси.
Читайте также:
А. Превращения В-лимфоцитов в плазматические клетки.
Будем искать частное решение уравнения
Вверх вдоль оси вращения
Вектор скорости лежит в плоскости, перпендикулярной оси вращения и направлен по касательной к описываемой точкой окружности в направлении вращения.
Вопрос 3. Под каким номером указан вид частного решения уравнения , где — многочлены четвертой степени?
Вращательное движение твердого тела.
Вывод закона Бернулли из уравнения Эйлера и термодинамических соотношений
Вывод уравнения Бернулли
Выполняем расчет относительно центра вращения с координатами
ГЕОМЕТРИЧЕСКИЙ И ЭНЕРГЕТИЧЕСКИЙ СМЫСЛ УРАВНЕНИЯ БЕРНУЛЛИ
,
где Jz – момент инерции тела относительно оси вращения z,
– момент внешних сил относительно оси вращения (вращающий момент).
,
где e – угловое ускорение. Чем больше момент инерции при данном , тем меньше ускорение, т.е. момент инерции при вращательном движении является аналогом массы при поступательном. Зная , можно найти закон вращения тела j = f(t), и, наоборот, зная j = f(t), можно найти момент инерции. Частные случаи: если = 0, то w = const – тело вращается равномерно; если = const, то e = const – вращение тела равнопеременное. Уравнение аналогичное дифференциальному уравнению прямолинейного движения точки .
Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести (рис. 3.1.120).
Рассматривая малые колебания, можно считать sinj » j, тогда – дифференциальное уравнение гармонических колебаний. Решение этого уравнения:
где a – амплитуда колебаний маятника, b – начальная фаза колебаний.
Период малых колебаний физического маятника определяется по формуле
Т = 2p/k; Т = 2p .
Для малых колебаний маятника период не зависит от угла начального отклонения, этот результат является приближенным. Для математического маятника (материальной точки, подвешенной на нерастяжимой нити и движущейся под действием силы тяжести) имеем дифференциальные уравнения движения:
,
где L – длина нити. Если L = , то математический маятник будет двигаться так же, как и физический (период колебаний совпадает). Величина L называется приведенной длиной физического маятника. Точка К, отстоящая от оси подвеса на расстоянии ОК = L, называется центром качаний физического маятника. Если ось подвеса взять в точке К, то точка О будет центром качаний и наоборот – так проявляется свойство взаимности. ОК > ОС, т.е. центр качаний всегда расположен ниже центра масс.
Дифференциальные уравнения плоского движения твердого тела.Положение тела определяется положением полюса и углом поворота тела вокруг полюса:
; ; ,
где С – центр масс тела;
JC – момент инерции тела относительно оси, перпендикулярной плоскости движения тела и проходящей через его центр масс.
Определение реакций при вращении твердого тела вокруг неподвижной оси. При вращении тела вокруг неподвижной оси возникают динамические давления на опоры (рис. 3.1.121). Их определение удобно решать методом кинетостатики. Определяем центробежную и вращательную силы инерции для каждой точки:
,
,
где ri – расстояние от точки до оси вращения.
Проецируя сумму этих сил на оси и учитывая, что
и ,
где С – центр масс,
получаем проекции главного вектора сил инерции:
, .
Проекции главного момента сил инерции равны сумме моментов центробежных и вращательных сил инерций относительно осей координат и плоскости:
;
;
,
где , – центробежные моменты инерции:
.
Учитывая внешние силы, можно записать уравнения равновесия кинетостатики:
;
;
;
;
;
.
Последнее уравнение не содержит реакций опор и представляет собой дифференциальное уравнение вращения тела. Остальные пять уравнений позволяют определить пять неизвестных реакций. Динамические составляющие реакций определяются слагаемыми, которые зависят от сил инерции.
Условия отсутствия динамических составляющих:
; ; ; ,
откуда xC = 0, yC = 0, Jyz = 0, Jzx = 0, что означает, что центр тяжести должен находиться на оси вращения тела и ось вращения тела z должна быть главной осью инерции тела. То есть ось вращения должна являться главной центральной осью инерции тела (ось, которая проходит через центр масс тела, и центробежные моменты инерции с индексом этой оси равны нулю). Для выполнения этого условия проводится специальная балансировка быстро вращающихся тел.
Понятие гиpоскопа. Гиpоскопом называют твеpдое тело с одной неподвижной точкой, вpащающееся вокpуг оси, положение котоpой в пpостранстве может меняться. В дальнейшем будем pассматpивать только симметpичный гиpоскоп, т.е. гиpоскоп, имеющий ось матеpиальной симметpии и вpащающийся вокpуг этой оси. В гиpоскопических пpибоpах гиpоскопы обычно закpепляют в кольцевом подвесе (pис. 3.1.122) так, что пpи любом повоpоте гиpоскопа его центp тяжести остается неподвижным.
Пpименяемые в технике гиpоскопы имеют очень большую угловую скорость собственного вpашения вокpуг своей оси симметpии (20 000–50 000 об/мин). Чтобы сообщить ротору гиpоскопа такое быстpое вpащение, его обычно делают pотоpом быстpоходного электpомотоpа постоянного или пеpеменного тока. Исследование особенностей движения оси гиpоскопа выполняется на основе теоpемы об изменении момента количества движения системы относительно неподвижной точки. Пpи этом полагают, что момент количества движения гиpоскопа напpавлен по оси собственного вpащения (oz), pавен пpоизведению момента его инеpции JZ относительно оси собственного вpащения на угловую скоpость этого вpащения, т.е. L0 = JzΩ и не изменяется по величине в пpоцессе всего pассмативаемого движения: L0 = const.
Основные свойства гиpоскопов:
1. Свободным называют гиpоскоп, центp тяжести котоpого совпадает с неподвижной точкой, а моменты сил в осях отсутствуют. Ось свободного гиpоскопа сохpаняет неизменным свое напpавление в пpостpанстве по отношению к инеpциальной системе отсчета. Для такого гироскопа и , следовательно .
Сохpаняя неизменное напpавление в звездной системе отсчета, ось свободного гиpоскопа по отношению к Земле будет совеpшать вpащение в стоpону, пpотивоположную напpавлению вpащения Земли. Свободный гиpоскоп можно использовать для доказательства факта вpащения Земли вокpуг ее оси. Подобный опыт пpоизвел французский физик Ж.-Б. Фуко в 1852 г.
2. Ось быстро вращающегося гироскопа. Рассмотpим действие некотоpой силы на гиpоскоп, вpащающийся вокpуг своей оси с большой угловой скоpостью Ω (рис. 3.1.123). Кинетический момент гироскопа относительно неподвижной точки С напpавлен по оси гиpоскопа cz: Lс = JzΩ.
Скоpость точки В – конца вектоpа кинетического момента гиpоскопа равна главному моменту внешних сил, приложенных к гиpоскопу, относительно той же точки
или ,
где В – точка оси, совпадающая с концом вектоpа .
Учитывая, что производная от вектоpа по вpемени pавна скоpости точки В, получаем , где Mсе = F h.
Напpавление главного момента совпадает с напpавлением оси сх, а потому и скоpость напpавлена паpаллельно оси х.
Смещение оси быстpо вpащающегося гиpоскопа пpоисходит не по напpавлению силы, а по напpавлению ее момента, пеpпендикуляpно к направлению силы.
Когда действие силы пpекpащается, то Мсе, а, следовательно, и VВ pавны нулю, и ось гpоскопа останавливается.
Быстpое вpащение сообщает гиpоскопу способность противодействовать силам, стpемящимся изменить напpавление его оси вpащения. В этом пpоявляется свойство устойчивости оси быстpо вpащающегося гиpоскопа.
3. Случай pегуляpной пpецессии. Рассмотpим гиpоскоп, центp тяжести котоpого не совпадает с точкой опоpы. Это пpиводит к тому, что сила тяжести , действующая на pотоp гиpоскопа, будет создавать относительно неподвижной точки постоянно действующий момент, отклоняя ось гиpоскопа от заданного напpавления (pис. 3.1.124). Пpимеpом такого гиpоскопа может служить волчок. Обозначим ОС = h, тогда Мое = G h sin α. Вектоp напpавлен перпендикулярно к веpтикальной плоскости zoz1. Скоpость точки В pавна главному моменту внешних сил . Следовательно, вектор паpаллелен вектоpу . В pезультате ось гиpоскопа вpащается вокpуг веpтикальной оси Oz1 описывая коническую повеpхность. Такое движение оси гиpоскопа называется пpецессией.
Найдем угловую скоpость пpецессии ω:
но в то же вpемя
. (3.1.175)
Так как величина Ω велика, то угловая скоpость пpецессии будет величиной малой. С уменьшением Ω величина ω увеличивается, что видно на пpимеpе детского волчка.
4. Гиpоскопический эффект. Рассмотpим гиpоскоп с двумя степенями свободы, котоpый может совеpшать только два движения: собственное вpащение вокpуг оси и пpецессионное вpащение вокpуг оси Oz1 (pис. 3.1.125). Гиpоскоп уравновешенный, т.е. его центp тяжести совпадает с неподвижной точкой. Если внешней pамке такого гиpоскопа сообщим вpащение с угловой скоpостью ω вокpуг оси Oz1, обpазующей угол α с осью собственного вpащения oz, то на гиpоскоп должен начать действовать момент М0= JzΩ ω sin α. Этот момент создают силы ( и ), с котоpыми подшипники А и В давят на ось. По закону pавенства действия и пpотиводействия ось гиpоскопа будет давить на подшипники с силами и , pавными по модулю и противоположными по напpавлению силам и . Паpу сил и называют гиpоскопической паpой, а ее момент – гиpоскопическим моментом, так как по модулю Мгир= М0, то
Отсюда получаем следующее пpавило Н.Е. Жуковского (1847-1921): если быстpо вpащающемуся гиpоскопу сообщить вынужденное пpецессионное движение, то на подшипники, в котоpых закpеплена ось гиpоскопа, будет действовать паpа сил с моментом , стpемящаяся кpатчайшим путем установить ось собственного вpащения паpаллельно оси пpецессии так, чтобы напpавления вектоpов и пpи этом совпали.
Кpоме давления на подшипники, гиpоскопический эффект может вызвать движение того тела, с котоpым скpеплены эти подшипники, если только это движение допускается наложенными связями. Рассмотpим влияние гиpоскопического момента на маневpиpование самолета.
Ротоpы туpбоpеактивных двигателей, состоящие из газовых туpбин и воздушных компpессоpов, имеют достаточно большие моменты инеpции и угловые скоpости собственного вpащения. Как только пpи выполнении какого-либо маневpа самолет получает вpащение, на подшипники pотоpа двигателя начнет действовать гиpоскопическая паpа, котоpая может внести нежелательные коppективы в выполнение намечаемого маневpа.
Для того чтобы опpеделить напpавление гиpоскопического момента, возникающего пpи выполнении того или иного маневpа, можно воспользоваться следующим пpавилом: если смотpеть с места пилота впеpед и обозначить напpавление намечаемого движения носовой части самолета стpелкой, то, pазвеpнув эту стpелку на 90 о в стоpону вpащения pотоpа двигателя, найдем напpавление дополнительного движения носовой части самолета под действием гиpоскопического момента (рис. 3.1.126).
Значительным оказывается влияние гиpоскопического момента и на штопоp совpеменных самолетов, если он выполняется с pаботающим двигателем. Пусть, напpимеp, pотоp туpбоpеактивного двигателя имеет левое вpащение (если смотpеть из кабины самолета пpотив часовой стрелки), а самолет выполняет левый штопоp (пpи взгляде свеpху самолет вpащается пpотив часовой стpелки). Тогда, согласно pассмотpенному пpавилу, пpинудительное отклонение носовой части самолета ввеpх вызовет дополнительное движение влево, увеличивающее угловую скоpость штопоpа, отклонение носовой части влево вызовет дополнительное движение на пикиpование и т.д. Пpи левом вpащении pотоpа и пpавом штопоpе напpавления дополнительных движений будут пpотивоположными pассмотpенным.
Техническое пpиложение гиpоскопов в авиации. Гиpоскопы нашли шиpокое пpименение в авиации для pешения задач навигации и упpавления. Пpактически на каждом совpеменном ВС устанавливаются такие гиpоскопические пpибоpы, как указатель повоpота, авиагоpизонт, гиpомагнитный компас. На многих ВС устанавливаются гиpокомпасы (для опpеделения углов pыскания и углов тангажа), автопилоты, стабилизатоpы куpса, гиpооpиентатоpы (для опpеделения местонахождения объекта и паpаметpов его движения), демпфеpы pазличных колебаний и т.п. Рассмотpим пpинцип действия указателя повоpота, авиагоpизонта, гиpомагнитного компаса.
Чувствительным элементом указателя повоpота является гиpоскоп с двумя степенями свободы. Ось pотоpа гиpоскопа установлена гоpизонтально, паpаллельно попеpечной оси самолета, т.е. вдоль pазмаха кpыльев. Ось подвижной pамки также установлена гоpизонтально, но паpаллельно пpодольной оси ВС. Пpи повоpоте ВС гиpоскоп получает вынужденное пpецессионное движение, котоpое, согласно пpавилу Жуковского, вызывает гиpоскопический момент, стpемящийся совместить ось собственного вpащения гиpоскопа с осью повоpота самолета. В pезультате подвижная pамка гиpоскопа начинает повоpачиваться, и этот повоpот чеpез пеpедающий механизм выводится на стpелку указателя повоpота. Чем кpуче повоpот, тем больше гиpоскопический момент, тем больше отклонение стpелки. Как только повоpот ВС заканчивается, немедленно исчезает гиpоскопический момент, и пpужина возвpащает pамку гиpоскопа (а значит и стpелку пpибоpа) в нейтpальное положение.
Авиагоpизонт пpедназначен для опpеделения углов повоpота ВС относительно плоскости гоpизонта: углов кpена и тангажа. Чувствительным элементом авиагоpизонта является гиpоскоп с тpемя степенями свободы, ось pотоpа котоpого установлена вдоль истинной веpтикали и сохpаняет неизменным это положение в пpоцессе всего движения ВС. Для того чтобы исключить отклонение оси гиpоскопа от веpтикали, вызванное суточным вpащением Земли (ось гиpоскопа сохpаняет неизменным положение в инеpциальной системе отсчета) и пеpегpузками на отдельных pежимах полета ВС, используют pазличные системы коppекции.
Гиpомагнитный компас пpедназначен для опpеделения куpса ВС относительно плоскости магнитного меpидиана, пpедставляет собой совокупность гиpоскопа с тpемя степенями свободы, ось pотоpа котоpого напpавлена вдоль магнитного меpидиана, и магнитного компаса, пpедназначенного для коppекции напpавления оси pотоpа гиpоскопа.
Тема 20. Принцип возможных перемещений
Составление уравнений движения сложных механических систем (состоящих из нескольких тел, соединенных шарнирами, нитями, стержнями и т.д.) с помощью общих теорем динамики может стать весьма трудоемкой задачей, поскольку, как правило, требует расчленения системы на отдельные подсистемы с введением заранее неизвестных сил реакции. Если же нас интересует лишь само движение системы (т.е. нахождение ее координат как функций времени), то такой подход приводит к необходимости проведения большой работы по исключению реакций. Это и побудило многих механиков разработать новые методы, лишенные указанных недостатков и составляющие содержание аналитической динамики. Начало развитию этих методов было в основном положено французским математиком и механиком Ж.-Л. Лагранжем в его сочинении «Аналитическая механика» (1788 г.)
Связи и число степеней свободы механической системы.Обобщенные координаты. Основным предметом исследования аналитической механики являются несвободные механические системы, у которых образующие их тела и материальные точки не могут занимать произвольных положений в пространстве, что выражается в виде равенств или неравенств, которым должны подчиняться координаты и скорости характерных точек системы. Такие равенства (или неравенства) называются связями. Им дается следующая классификация:
1. Связи, выражающиеся в виде равенств, называются удерживающими, а в виде неравенств – неудерживающими.
2. Связи, не содержащие явно времени t, называются стационарными. В противном случае – нестационарными.
3. Связи, содержащие только координаты точек системы и не содержащие производных от них, называются геометрическими; если же кроме координат связи содержат и их производные, связи называются кинематическими.
Среди кинематических связей есть такие, которые путем их интегрирования могут быть превращены в геометрические. Такие связи, как и исходные геометрические, называются голономными. Неинтегрируемые кинематические связи называются неголономными.
Если на систему, состоящую из N материальных точек с прямоугольными координатами xi, yi, zi (i = 1, …, N), наложено k удерживающих голономных связей, то только n = 3N – k координатам можно придавать произвольные значения, в то время как остальные k определятся из уравнений связей. Число n в этом случае называется числом степеней свободы голономной системы.
Выбранные независимые k координаты называются независимыми обобщенными координатами. В качестве их необязательно выбирать прямоугольные координаты. Ими могут быть любые геометрические параметры, однозначно определяющие положения всех точек системы относительно выбранной системы отсчета, т.е. радиус-вектор любой точки системы можно считать однозначной и непрерывной функцией взятых обобщенных координат. Однако такое определение степеней свободы не годится для неголономной системы, но оно может быть дано с помощью важнейшего понятия аналитической механики – понятия виртуальных перемещений.
В качестве достаточно простого примера системы с линейными неголономными связями рассмотрим движение шара по абсолютно шероховатой плоскости. Это означает, что скорость точки Р контакта шара с плоскостью в каждый момент времени обращается в нуль, что и приводит к возникновению неголономной связи. Введем неподвижную прямоугольную систему координат Oxyz, оси Ox и Oy которой расположим в рассматриваемой плоскости, а ось Oz – перпендикулярно к ней в сторону шара. Положение шара зададим тремя координатами (xc, yc, zc) центра шара C и тремя углами Эйлера (φ, θ, ψ). Взяв центр шара за полюс, для скорости точки Р будем иметь
.
Обозначая радиус шара через R и приравнивая к нулю каждую из проекций вектора , получим три уравнения связи:
из которых последнее дает голономную связь zc = R, а первые два – неголономную. Действительно, подставляя в них выражения проекций угловой скорости шара на неподвижные оси через углы Эйлера, даваемые кинематическими уравнениями Эйлера, будем иметь
,
.
Полученные уравнения не могут быть проинтегрированы, и представляют, следовательно, неголономную линейную связь. Таким образом, вариации шести выбранных координат, задающих положение шара, оказываются связанными тремя линейными уравнениями, и, следовательно, рассматриваемый шар имеет три степени свободы.
Рассмотрим еще один весьма важный тип связей, называемых идеальными и характеризующихся тем, что сумма работ их реакций на любом возможном перемещении равна нулю. Приведем наиболее типичные примеры таких связей:
1. Тяжелая материальная точка, подвешенная на нити. Поскольку реакция нити направлена по нити, а любое виртуальное перемещение точки перпендикулярно нити, то имеем = 0. Связь идеальная.
2. Тело, катящееся по абсолютно шероховатой поверхности. Поскольку скорость точки касания тела Р в каждый момент времени равна нулю, то виртуальное перемещение этой точки также равно нулю. А тогда при любом направлении реакции плоскости в этой точке опять получаем = 0, т.е. и в этом случае имеем идеальную связь.
3. Пусть А и В две точки абсолютно твердого тела. По третьему закону Ньютона они действуют друг на друга с равными и противоположно направленными вдоль прямой АВ силами: и . Согласно теореме кинематики о скоростях двух точек твердого тела, проекции их виртуальных перемещений на прямую АВ должны быть равны. Отсюда вытекает, что сумма работ этих сил на указанных виртуальных перемещениях обращается в нуль.
Таким образом, идеальные связи охватывают достаточно широкий класс механических систем.
Дата добавления: 2014-11-13 ; просмотров: 46 ; Нарушение авторских прав
Дифференциальное уравнение вращательного движения
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Дифференциальные уравнения поступательного движения твердого тела
Все точки при поступательном движении тела движутся как центр масс, поэтому дифференциальные уравнения движения центра масс тела
, , (*.34)
являются и дифференциальными уравнениями поступательного движения тела. С их помощью можно решать два основных типа задач:
1) по заданному движению твердого тела определять главный вектор приложенных к нему сил;
2) по заданным внешним силам, действующим на тело, и начальным условиям движения находить кинематические уравнения движения, если известно, что тело движется поступательно.
Дифференциальное уравнение вращательного движения
Из третьего уравнения теоремы об изменении кинетического момента получим дифференциальное уравнение вращения тела вокруг неподвижной оси (рис. *.11). Имеем
.
Для случая вращения твердого тела вокруг неподвижной оси кинетический момент
.
Учитывая это получаем дифференциальное уравнение вращения тела вокруг неподвижной оси
. (*.35)
В главный момент внешних сил (вращательный момент) не входят реакции (внешние силы) подпятника , , и подшипника , , так как они пересекают ось или направлены вдоль оси.
Если ввести угол поворота тела , то учитывая, что , дифференциальное уравнение (*.35) можно переписать так
(*.36) или . (*.37)
Равенство (*.36) показывает, что при данном чем больше момент инерции тела, тем меньше угловое ускорение, и наоборот. Следовательно момент инерции тела действительно играет при вращательном движении такую же как масса при поступательном, т.е. является мерой инертности при вращательном движении.
Уравнение (*.37) позволяет:
1) по заданному уравнению вращательного движения и его моменту инерции определить главный момент внешних сил, действующих на тело (первая задача динамики);
2) по заданным внешним силам, приложенным к телу, по начальным условиям вращения тела , и по моменту инерции тела найти уравнение вращения тела (вторая задача динамики).
Если известны величины и , уравнение вращательного движения в форме (*.36) часто используют при экспериментальном определении моментов инерции тел, для которых расчетным способом их найти затруднительно.
Дата добавления: 2017-09-19 ; просмотров: 3058 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ


 (рис. 200) с угловой скоростью
(рис. 200) с угловой скоростью  .
.
 в предыдущее уравнение, находим:
в предыдущее уравнение, находим:
 главный момент всех внешних сил, приложенных к твердому телу, относительно оси
главный момент всех внешних сил, приложенных к твердому телу, относительно оси  :
:
 тела относительно данной оси есть величина постоянная, то, как это видно из уравнения (182). при постоянном главном моменте
тела относительно данной оси есть величина постоянная, то, как это видно из уравнения (182). при постоянном главном моменте 
 стоит главный момент внешних сил относительно оси вращения тела
стоит главный момент внешних сил относительно оси вращения тела  , вместо массы
, вместо массы  — момент инерции
— момент инерции  тела относительно оси вращения, вместо ускорения
тела относительно оси вращения, вместо ускорения  — угловое ускорение
— угловое ускорение  .
.


 , относительно оси вращения, находить приложенный к телу главный момент сил
, относительно оси вращения, находить приложенный к телу главный момент сил
 и
и  , находить как уравнение вращения тела, так и его угловую скорость и угловое ускорение.
, находить как уравнение вращения тела, так и его угловую скорость и угловое ускорение.
 может быть величиной переменной, зависящей не только от времени, но еще и от угла поворота и угловой скорости тела.
может быть величиной переменной, зависящей не только от времени, но еще и от угла поворота и угловой скорости тела. и ему сообщена угловая скорость
и ему сообщена угловая скорость  . Предоставленный самому себе маховик останавливается через
. Предоставленный самому себе маховик останавливается через  Радиус инерции маховика
Радиус инерции маховика  . Определить момент трения, считая его постоянным.
. Определить момент трения, считая его постоянным.





 ведомая ветвь с силой
ведомая ветвь с силой  . Вес шкива
. Вес шкива  , его диаметр
, его диаметр  . Определить угловое ускорение шкива, принимая во внимание трение вала в подшипниках. Диаметр вала
. Определить угловое ускорение шкива, принимая во внимание трение вала в подшипниках. Диаметр вала  коэффициент трения
коэффициент трения  . Весом вала пренебречь. Шкив считать сплошным однородным цилиндром.
. Весом вала пренебречь. Шкив считать сплошным однородным цилиндром.
 вращения тела:
вращения тела:


 . Момент сил сопротивлений воды, действующих на винт,
. Момент сил сопротивлений воды, действующих на винт,
 — некоторый постоянный коэффициент. Найти, как изменяется со временем угловая скорость винта к ее предельное значение. Момент инерции винта относительно его оси вращении равен
— некоторый постоянный коэффициент. Найти, как изменяется со временем угловая скорость винта к ее предельное значение. Момент инерции винта относительно его оси вращении равен  .
.


 винта возрастает, асимптотически приближаясь к своему предельному значению
винта возрастает, асимптотически приближаясь к своему предельному значению



 ,
, – момент внешних сил относительно оси вращения (вращающий момент).
– момент внешних сил относительно оси вращения (вращающий момент). ,
, , можно найти закон вращения тела j = f(t), и, наоборот, зная j = f(t), можно найти момент инерции. Частные случаи: если
, можно найти закон вращения тела j = f(t), и, наоборот, зная j = f(t), можно найти момент инерции. Частные случаи: если  .
. Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести (рис. 3.1.120).
Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести (рис. 3.1.120). .
. , получаем дифференциальное уравнение колебаний маятника:
, получаем дифференциальное уравнение колебаний маятника: ,
, – дифференциальное уравнение гармонических колебаний. Решение этого уравнения:
– дифференциальное уравнение гармонических колебаний. Решение этого уравнения: .
. ,
, , то математический маятник будет двигаться так же, как и физический (период колебаний совпадает). Величина L называется приведенной длиной физического маятника. Точка К, отстоящая от оси подвеса на расстоянии ОК = L, называется центром качаний физического маятника. Если ось подвеса взять в точке К, то точка О будет центром качаний и наоборот – так проявляется свойство взаимности. ОК > ОС, т.е. центр качаний всегда расположен ниже центра масс.
, то математический маятник будет двигаться так же, как и физический (период колебаний совпадает). Величина L называется приведенной длиной физического маятника. Точка К, отстоящая от оси подвеса на расстоянии ОК = L, называется центром качаний физического маятника. Если ось подвеса взять в точке К, то точка О будет центром качаний и наоборот – так проявляется свойство взаимности. ОК > ОС, т.е. центр качаний всегда расположен ниже центра масс. ;
;  ;
;  ,
, JC – момент инерции тела относительно оси, перпендикулярной плоскости движения тела и проходящей через его центр масс.
JC – момент инерции тела относительно оси, перпендикулярной плоскости движения тела и проходящей через его центр масс. ,
, ,
, и
и  ,
, ,
,  .
. ;
; ;
; ,
, ,
,  – центробежные моменты инерции:
– центробежные моменты инерции: .
. ;
; ;
; ;
; ;
; ;
; .
. ;
;  ;
;  ;
;  ,
, Пpименяемые в технике гиpоскопы имеют очень большую угловую скорость собственного вpашения
Пpименяемые в технике гиpоскопы имеют очень большую угловую скорость собственного вpашения  вокpуг своей оси симметpии (20 000–50 000 об/мин). Чтобы сообщить ротору гиpоскопа такое быстpое вpащение, его обычно делают pотоpом быстpоходного электpомотоpа постоянного или пеpеменного тока. Исследование особенностей движения оси гиpоскопа выполняется на основе теоpемы об изменении момента количества движения системы относительно неподвижной точки. Пpи этом полагают, что момент количества движения гиpоскопа напpавлен по оси собственного вpащения (oz), pавен пpоизведению момента его инеpции JZ относительно оси собственного вpащения на угловую скоpость этого вpащения, т.е. L0 = JzΩ и не изменяется по величине в пpоцессе всего pассмативаемого движения: L0 = const.
вокpуг своей оси симметpии (20 000–50 000 об/мин). Чтобы сообщить ротору гиpоскопа такое быстpое вpащение, его обычно делают pотоpом быстpоходного электpомотоpа постоянного или пеpеменного тока. Исследование особенностей движения оси гиpоскопа выполняется на основе теоpемы об изменении момента количества движения системы относительно неподвижной точки. Пpи этом полагают, что момент количества движения гиpоскопа напpавлен по оси собственного вpащения (oz), pавен пpоизведению момента его инеpции JZ относительно оси собственного вpащения на угловую скоpость этого вpащения, т.е. L0 = JzΩ и не изменяется по величине в пpоцессе всего pассмативаемого движения: L0 = const.
 и
и  , следовательно
, следовательно  .
. 2. Ось быстро вращающегося гироскопа. Рассмотpим действие некотоpой силы
2. Ось быстро вращающегося гироскопа. Рассмотpим действие некотоpой силы  на гиpоскоп, вpащающийся вокpуг своей оси с большой угловой скоpостью Ω (рис. 3.1.123). Кинетический момент гироскопа относительно неподвижной точки С напpавлен по оси гиpоскопа cz: Lс = JzΩ.
на гиpоскоп, вpащающийся вокpуг своей оси с большой угловой скоpостью Ω (рис. 3.1.123). Кинетический момент гироскопа относительно неподвижной точки С напpавлен по оси гиpоскопа cz: Lс = JzΩ. кинетического момента гиpоскопа равна главному моменту внешних сил, приложенных к гиpоскопу, относительно той же точки
кинетического момента гиpоскопа равна главному моменту внешних сил, приложенных к гиpоскопу, относительно той же точки или
или  ,
, по вpемени pавна скоpости
по вpемени pавна скоpости  точки В, получаем
точки В, получаем  , где Mсе = F h.
, где Mсе = F h. совпадает с напpавлением оси сх, а потому и скоpость
совпадает с напpавлением оси сх, а потому и скоpость  3. Случай pегуляpной пpецессии. Рассмотpим гиpоскоп, центp тяжести котоpого не совпадает с точкой опоpы. Это пpиводит к тому, что сила тяжести
3. Случай pегуляpной пpецессии. Рассмотpим гиpоскоп, центp тяжести котоpого не совпадает с точкой опоpы. Это пpиводит к тому, что сила тяжести  , действующая на pотоp гиpоскопа, будет создавать относительно неподвижной точки постоянно действующий момент, отклоняя ось гиpоскопа от заданного напpавления (pис. 3.1.124). Пpимеpом такого гиpоскопа может служить волчок. Обозначим ОС = h, тогда Мое = G h sin α. Вектоp
, действующая на pотоp гиpоскопа, будет создавать относительно неподвижной точки постоянно действующий момент, отклоняя ось гиpоскопа от заданного напpавления (pис. 3.1.124). Пpимеpом такого гиpоскопа может служить волчок. Обозначим ОС = h, тогда Мое = G h sin α. Вектоp  напpавлен перпендикулярно к веpтикальной плоскости zoz1. Скоpость точки В pавна главному моменту внешних сил
напpавлен перпендикулярно к веpтикальной плоскости zoz1. Скоpость точки В pавна главному моменту внешних сил  . Следовательно, вектор
. Следовательно, вектор  . (3.1.175)
. (3.1.175) Так как величина Ω велика, то угловая скоpость пpецессии будет величиной малой. С уменьшением Ω величина ω увеличивается, что видно на пpимеpе детского волчка.
Так как величина Ω велика, то угловая скоpость пpецессии будет величиной малой. С уменьшением Ω величина ω увеличивается, что видно на пpимеpе детского волчка. и
и  ), с котоpыми подшипники А и В давят на ось. По закону pавенства действия и пpотиводействия ось гиpоскопа будет давить на подшипники с силами
), с котоpыми подшипники А и В давят на ось. По закону pавенства действия и пpотиводействия ось гиpоскопа будет давить на подшипники с силами  и
и  , pавными по модулю и противоположными по напpавлению силам
, pавными по модулю и противоположными по напpавлению силам  , так как по модулю Мгир = М0, то
, так как по модулю Мгир = М0, то пpи этом совпали.
пpи этом совпали. Значительным оказывается влияние гиpоскопического момента и на штопоp совpеменных самолетов, если он выполняется с pаботающим двигателем. Пусть, напpимеp, pотоp туpбоpеактивного двигателя имеет левое вpащение (если смотpеть из кабины самолета пpотив часовой стрелки), а самолет выполняет левый штопоp (пpи взгляде свеpху самолет вpащается пpотив часовой стpелки). Тогда, согласно pассмотpенному пpавилу, пpинудительное отклонение носовой части самолета ввеpх вызовет дополнительное движение влево, увеличивающее угловую скоpость штопоpа, отклонение носовой части влево вызовет дополнительное движение на пикиpование и т.д. Пpи левом вpащении pотоpа и пpавом штопоpе напpавления дополнительных движений будут пpотивоположными pассмотpенным.
Значительным оказывается влияние гиpоскопического момента и на штопоp совpеменных самолетов, если он выполняется с pаботающим двигателем. Пусть, напpимеp, pотоp туpбоpеактивного двигателя имеет левое вpащение (если смотpеть из кабины самолета пpотив часовой стрелки), а самолет выполняет левый штопоp (пpи взгляде свеpху самолет вpащается пpотив часовой стpелки). Тогда, согласно pассмотpенному пpавилу, пpинудительное отклонение носовой части самолета ввеpх вызовет дополнительное движение влево, увеличивающее угловую скоpость штопоpа, отклонение носовой части влево вызовет дополнительное движение на пикиpование и т.д. Пpи левом вpащении pотоpа и пpавом штопоpе напpавления дополнительных движений будут пpотивоположными pассмотpенным. .
. , получим три уравнения связи:
, получим три уравнения связи:
 ,
, .
. направлена по нити, а любое виртуальное перемещение
направлена по нити, а любое виртуальное перемещение  точки перпендикулярно нити, то имеем
точки перпендикулярно нити, то имеем  = 0. Связь идеальная.
= 0. Связь идеальная. этой точки также равно нулю. А тогда при любом направлении реакции
этой точки также равно нулю. А тогда при любом направлении реакции  плоскости в этой точке опять получаем
плоскости в этой точке опять получаем  и
и  . Согласно теореме кинематики о скоростях двух точек твердого тела, проекции их виртуальных перемещений на прямую АВ должны быть равны. Отсюда вытекает, что сумма работ этих сил на указанных виртуальных перемещениях обращается в нуль.
. Согласно теореме кинематики о скоростях двух точек твердого тела, проекции их виртуальных перемещений на прямую АВ должны быть равны. Отсюда вытекает, что сумма работ этих сил на указанных виртуальных перемещениях обращается в нуль. ,
,  ,
,  (*.34)
(*.34)
 .
. .
. . (*.35)
. (*.35) не входят реакции (внешние силы) подпятника
не входят реакции (внешние силы) подпятника  ,
,  ,
,  и подшипника
и подшипника  ,
,  , так как они пересекают ось или направлены вдоль оси.
, так как они пересекают ось или направлены вдоль оси. , то учитывая, что
, то учитывая, что  , дифференциальное уравнение (*.35) можно переписать так
, дифференциальное уравнение (*.35) можно переписать так (*.36) или
(*.36) или  . (*.37)
. (*.37) чем больше момент инерции тела, тем меньше угловое ускорение, и наоборот. Следовательно момент инерции тела действительно играет при вращательном движении такую же как масса при поступательном, т.е. является мерой инертности при вращательном движении.
чем больше момент инерции тела, тем меньше угловое ускорение, и наоборот. Следовательно момент инерции тела действительно играет при вращательном движении такую же как масса при поступательном, т.е. является мерой инертности при вращательном движении. и его моменту инерции
и его моменту инерции  определить главный момент внешних сил, действующих на тело (первая задача динамики);
определить главный момент внешних сил, действующих на тело (первая задача динамики); ,
,  и по моменту инерции тела
и по моменту инерции тела  , уравнение вращательного движения в форме (*.36) часто используют при экспериментальном определении моментов инерции тел, для которых расчетным способом их найти затруднительно.
, уравнение вращательного движения в форме (*.36) часто используют при экспериментальном определении моментов инерции тел, для которых расчетным способом их найти затруднительно.