Дифференциальные уравнения плоского движения твердого тела



Дифференциальные уравнения плоского движения твердого тела
- Используйте теорему о движении центра масс для относительного движения системы к системе и изменения момента движения системы относительно центра масс Рисунок 57 вес тела Для координат, которые постепенно перемещаются в центре тяжести, вы получаете дифференциальное уравнение для плоского движения твердого тела.
Эти пары сил могут быть получены из пар сил, произвольно расположенных в плоскости пересечения путем перемещения в плоскости действия, вращения и одновременного изменения парных плеч и сил. Людмила Фирмаль
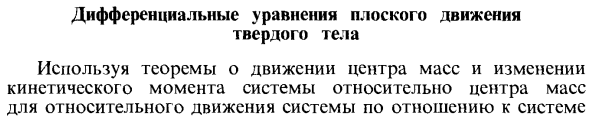
Для плоскости движения центра тяжести тела, которое выполняет плоское движение, выберите фиксированную систему координат Oxtylt, которая учитывает движение, и систему Cxu, которая движется вместе с центром тяжести (рисунок 57). Установите xc и yc в качестве координат центра Стационарная система координат. Далее по теореме о движении центра тяжести получены следующие два дифференциальных уравнения для плоского движения твердого тела. Где М — вес.
- Дифференциальное уравнение третьего порядка для плоского движения твердого тела получается из теоремы об изменении момента движения относительно центра масс (38) в проекции на движущуюся ось Cz. dK ^ ldl = LMC2 (F \ e>). Плоское движение твердого тела можно представить как вращение и перемещение относительно центра тяжести C и оси движения Cz. Для вращения вокруг оси момент движения вокруг этой оси рассчитывается как Где со — угловая скорость. JCl — Момент инерции объекта вокруг оси Cz.
Понятия пространства и времени также остаются прежними,и только пространство для принятого понятия инерции должно обладать свойством сопротивляться движению в нем материальных объектов. Людмила Фирмаль
Поскольку JCz является постоянной величиной, подставляя изменение в момент относительного движения в теорему с помощью Kc’g, оно становится следующим. Введение угла поворота ; JCzip = YMCz



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Магия тензорной алгебры: Часть 15 — Движение несвободного твердого тела
Введение
В прошлый раз мы рассмотрели один из способов получения дифференциальных уравнений движения твердого тела исходя из принципа Даламбера. Мы остановились на общей форме уравнений движения

Однако, внимательно взглянув на эти уравнения, меня следовало бы раскритиковать — дело в том, что в данных уравнениях число неизвестных слишком велико. К неизвестным следует отнести ускорение полюса и угловое ускорение тела , а также реакции связей . И если движение тела ограничено хотя бы одной связью, число неизвестных величин в (1) и (2) превышает число уравнений.
Это происходит потому, что левая часть уравнений (1) и (2) содержит ускорения, вычисляемые для случая свободного движения тела, то есть в них имеются избыточные координаты. Поэтому, систему (1), (2) следует дополнить уравнениями связей, описывающими ограничения, налагаемые связями на координаты, скорости и ускорения точек тела.
Этим мы сейчас и займемся — посмотрим, во что превращаются уравнения (1) и (2) при добавлении уравнений связей, и что дают нам полученные уравнения в практическом смысле.
1. Уравнения движения свободного твердого тела
Свободным называют такое тело, движение которого не ограничено связями. Соответственно в уравнениях (1) и (2) пропадают лишние неизвестные и они превращаются в
И для свободного тела нет смысла использовать произвольный полюс — лучше сменить центр приведения систем сил инерции на центр масс тела, записав уравнения движения в более простой форме
Уравнения (5) и (6) — дифференциальные уравнения свободного движения твердого тела. Они могут быть разрешены относительно ускорений и проинтегрированы численно, при заданных начальных условиях.
2. Уравнения движения твердого тела с одной неподвижной точкой
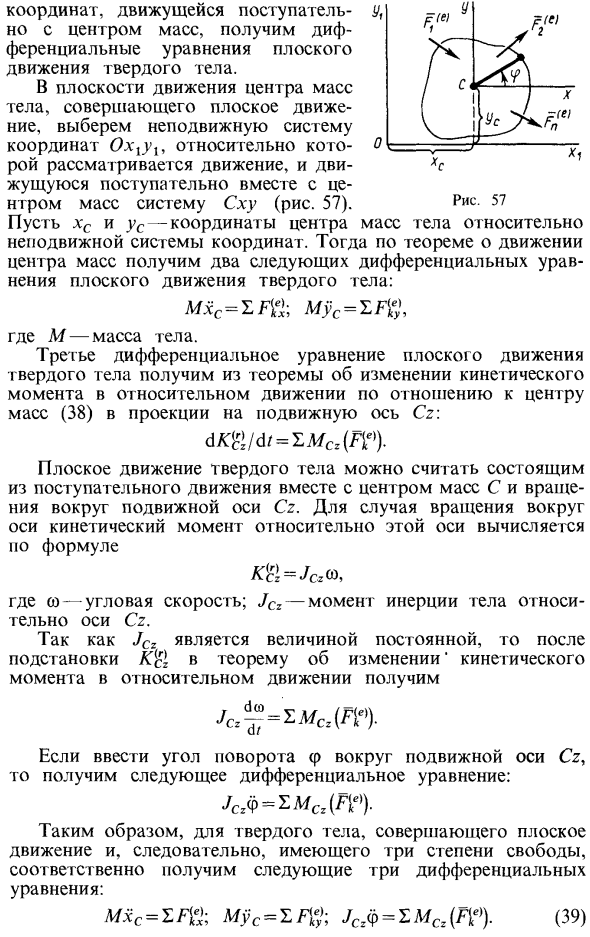
А теперь предположим, что движение тела ограничено сферическим шарниром, расположенным в точке . Тогда, выбрав полюс в этой неподвижной точке, мы можем добавить уравнение связи
Реакция сферического шарнира, выражается одной силой , поэтому, с учетом (7) уравнения (1) и (2) можно переписать в виде
причем , так как сила приложена в точке , значит, получаем окончательно
Уравнение (8) позволяет определить угловое ускорение тела, исходя из начальных условий задачи и известных активных сил, приложенных к телу, а уравнение (9) дает возможность, зная угловое ускорение, найти реакцию сферического шарнира. Таким образом мы получаем дифференциальные уравнения сферического движения.
3. Вращательное движение тела. Момент инерции тела относительно оси
Вращательным называется движение тела, когда две его точки остаются неподвижными в любой момент времени. Если выразить этот факт с помощью уравнений, то мы можем записать следующие уравнения связей

Условие (10) выражает неподвижность одной из точек тела, а условие (11) — неизменность направления оси вращения тела. Исходя из (11) можно выписать угловую скорость и угловое ускорение тела через параметры конечного поворота
Подставляем (12) и (10) в уравнение (2)
учитывая, что у нас две связи, и соответственно две реакции от подшипников, на которых происходит поворот тела. Причем сразу можно учесть, что , так как первая реакция приложена в точке . Кроме того выполним скалярное умножение последнего уравнения на орт оси вращения
Учтем, что момент второй реакции можно вычислить как , при этом , то есть получаем
Вторые слагаемые в обеих частях данного уравнения — смешанные произведения компланарных векторов и равны нулю, в итоге имеем
— дифференциальное уравнение вращения тела вокруг неподвижной оси, где
называют моментом инерции твердого тела относительно оси вращения, а
— проекция векторного момента относительно неподвижной точки на ось проходящую через эту точку или — момент силы относительно оси.
Выражение (14) крайне интересно. Если переписать его в тензорной форме, то мы получим формулу
позволяющую, по известному тензору инерции твердого тела определить его момент инерции относительно интересующей нас оси вращения, направление которой в пространстве задано ортом . Момент инерции (16) является скалярной величиной, характеризующей распределение массы тела вокруг оси вращения. Эта величина, равно как и уравнение (13) хорошо известны из общего курса теоретической механики.
4. Поступательное движение тела
При поступательном движении, связи, наложенные на тело препятствуют его вращению. В этом случае мы можем записать очевидные равенства
Полагая идеальность связей, мы можем записать условие, накладываемое на их реакции
где — вектор, касательный к траекториям точек тела. В случае поступательного движения, траектории всех его точек одинаковы, а значит и вектор касательной к траектории одинаков для всех точек. С учетом (17) и (18) можно переписать уравнение (1)
— дифференциальное уравнение поступательного движения тела в проекциях на касательную к траекториям его точек.
Заключение
В данной статье мы рассмотрели, как преобразуются общие уравнения движения твердого тела (1) и (2) если дополнить их уравнениями связей. При этом, мы легко и непринужденно построили дифференциальные уравнения движения для всех частных случаев движения тела, изучаемых теоретической механикой.
Благодарности
при подготовке данной статьи использован метод, предложенный пользователем SeptiM. В связи с очевидным удобством работы, хочу выразить признательность автору, за проделанную им работу.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Из общих теорем динамики можно получить дифференциальные уравнения движения твердого тела. При поступательном движении твердого тела все его точки движутся так же, как и центр масс. Поэтому дифференциальные уравнения поступательного движения получим из теоремы о движении центра масс:  ;
;  ;
;  , (14.1) где М—масса тела;
, (14.1) где М—масса тела;
 ,
,  ,
,  — проекция главного вектора внешних сил на оси координат. Используя дифференциальные уравнения (14.1), можно решать две задачи динамики поступательного движения твердого тела:
— проекция главного вектора внешних сил на оси координат. Используя дифференциальные уравнения (14.1), можно решать две задачи динамики поступательного движения твердого тела:
1. по заданным уравнениям движения тела определять главный вектор внешних сил, приложенных к твердому телу;
2. по заданным внешним силам, действующим на тело, и известным начальным условиям определять закон движения тела, если оно движется поступательно;
Таким образом, изучение поступательного движения твердого тела сводится к изучению движения одной его точки – центра масс тела.
Из теоремы об изменении кинетического момента системы относительно оси (10.15) с учетом (10.6) можно получить дифференциальное уравнение вращательного движения твердого тела  или
или  . (14.2) Уравнение (14.2) представляет собой дифференциальное уравнение вращательного движения твердого тела, с помощью которого можно решать следующие задачи:
. (14.2) Уравнение (14.2) представляет собой дифференциальное уравнение вращательного движения твердого тела, с помощью которого можно решать следующие задачи:
1. по заданному уравнению вращения тела  и известному моменту инерции
и известному моменту инерции  определять главный момент внешних сил, действующих на тело:
определять главный момент внешних сил, действующих на тело:  ;
;
2. по заданным внешним силам, приложенным к телу, и известным начальным условиям вращения  и
и  и моменту инерции
и моменту инерции  находить уравнение вращения тела
находить уравнение вращения тела  ;
;
3. по заданному закону вращательного движения тела и известному моменту внешних сил  определять момент инерции тела относительно оси вращения.
определять момент инерции тела относительно оси вращения.
Если к твердому телу приложен постоянно действующий момент внешних сил, то угловое ускорение тела также будет постоянным, т.е. может вращаться равноускоренно или равнозамедленно. Решение задачи целесообразно проводить в следующем порядке:
1. изобразить тело, вращение которого рассматривается;
2. приложить все активные силы и моменты, действующие на тело;
3. освободить тело от связей, заменив их реакциями;
4. составить уравнение вращательного движения;
5. решить полученное уравнение в соответствии с условием задачи.
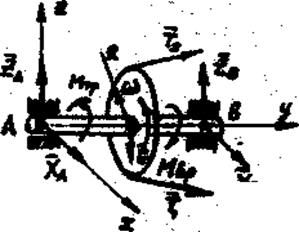 Рисунок 46 Рисунок 46 |
|
 , радиус шкива R=0,25м, масса вала со шкивом m=5кг и радиус инерции
, радиус шкива R=0,25м, масса вала со шкивом m=5кг и радиус инерции  =0,15м.
=0,15м.1. На вал действует сила тяжести  , вращающий момент Мвр, момент трения в опорах Мтр, реакции опор
, вращающий момент Мвр, момент трения в опорах Мтр, реакции опор  ,
,  ,
,  ,
,  , натяжение ведущей
, натяжение ведущей  и ведомой
и ведомой  ветвей ремня.
ветвей ремня.
2. Составим дифференциальное уравнение вращательного движения вала . (1) Момент инерции  кгм 2 . Момент внешних сил относительно оси вращения
кгм 2 . Момент внешних сил относительно оси вращения  . (2) Зная закон вращательного движения, определим угловое ускорение вала
. (2) Зная закон вращательного движения, определим угловое ускорение вала  . (3) Выразим момент трения в опорах из уравнения (2) с учетом (1) и (3):
. (3) Выразим момент трения в опорах из уравнения (2) с учетом (1) и (3):

 Нм.
Нм.
Так как плоское движение твердого тела состоит из поступательного движения с центром масс и вращения вокруг оси, проходящей через центр масс, то дифференциальные уравнения плоского движения твердого тела имеют вид: ; ;  . (14.3) Первые два уравнения описывают поступательную часть движения тела вместе с центром масс. Третье уравнение выражает закон вращения тела вокруг оси, проходящей через центр масс. При решении задач динамики плоского движения твердого тела необходимо:
. (14.3) Первые два уравнения описывают поступательную часть движения тела вместе с центром масс. Третье уравнение выражает закон вращения тела вокруг оси, проходящей через центр масс. При решении задач динамики плоского движения твердого тела необходимо:
1. изобразить все внешние силы, приложенные к телу;
2. выбрать систему координат и определить положительное направление отсчета угла поворота  ;
;
3. составить дифференциальные уравнения плоского движения твердого тела;
4. решить систему уравнений в соответствии с условием задачи.
 |
|
 . Кроме силы
. Кроме силы  и наименьшее значение коэффициента
и наименьшее значение коэффициентатрения f о плоскость, при котором возможно качение без скольжения. Барабан рассматривать как сплошной однородный цилиндр радиуса R.
1. Барабан совершает плоскопараллельное движение под действием заданных сил:  ,
,  и момента М. Полная реакция шероховатой поверхности состоит из нормального давления
и момента М. Полная реакция шероховатой поверхности состоит из нормального давления  и силы трения
и силы трения  , направленной вдоль горизонтальной шероховатой поверхности. Так как направление движения барабана под действием приложенных сил заранее не известно, направление силы трения показываем произвольно.
, направленной вдоль горизонтальной шероховатой поверхности. Так как направление движения барабана под действием приложенных сил заранее не известно, направление силы трения показываем произвольно.

|
 ;
;  ; (1)
; (1)  .
.2. Составим дифференциальные уравнения плоскопараллельного движения барабана:
или  ; (2)
; (2)
 ; (3)
; (3)
 . (4)
. (4)
3. Определение уравнение движения центра масс барабана. Так как  ,
,  , то уравнение (2), (3) и (4) содержат 4 неизвестных величины: N, Fтр,
, то уравнение (2), (3) и (4) содержат 4 неизвестных величины: N, Fтр,  ,
,  . Так как центр масс барабана движется по прямолинейной траектории,
. Так как центр масс барабана движется по прямолинейной траектории,  . Мгновенный центр скоростей барабана находится в точке В:
. Мгновенный центр скоростей барабана находится в точке В:  ;
;  ; следовательно,
; следовательно,  . (5) Момент инерции однородного цилиндра
. (5) Момент инерции однородного цилиндра  . Подставив (5) в (4), и разделив на R, получим
. Подставив (5) в (4), и разделив на R, получим  ;
;
 . (6) Сложив равенства (2) и (6), получим
. (6) Сложив равенства (2) и (6), получим  (7) или
(7) или  . (8) Дважды проинтегрируем уравнение (8):
. (8) Дважды проинтегрируем уравнение (8):  ; (9)
; (9)
 . (10) Постоянные интегрирования С1 и С2 определим из начальных условий:
. (10) Постоянные интегрирования С1 и С2 определим из начальных условий:
xC0=0; C2=0 . Окончательное уравнение движения центра масс барабана имеет вид: хс=-0,266gt 2 . (11) Знак «-» показывает, что движение барабана происходит в направлении противоположном положительному направлению оси х.
4. Определение fmin.
При качении без скольжения сила трения удовлетворяет неравенству:  . (12) Величину нормального давления N определим из уравнения (3):
. (12) Величину нормального давления N определим из уравнения (3):  ;
;  . Значение силы трения Fтр определим из уравнения (6), подставив в него значение
. Значение силы трения Fтр определим из уравнения (6), подставив в него значение  :
:  . Подставляя полученное значение силы трения в неравенство (12), получим
. Подставляя полученное значение силы трения в неравенство (12), получим  , откуда
, откуда  . Следовательно, наименьшее значение коэффициента трения, при котором возможно качение барабана без скольжения fmin=0,38.
. Следовательно, наименьшее значение коэффициента трения, при котором возможно качение барабана без скольжения fmin=0,38.
http://habr.com/ru/post/263853/
http://mydocx.ru/7-83742.html