Плоскопараллельное движение твердого тела.
1. Уравнения плоскопараллельного движения
Плоскопараллельным (или плоским) называется такое движение твердого тела, при котором все его точки перемешаются параллельно некоторой неподвижной плоскости П.

Рассмотрим сечение S тела какой-нибудь плоскостью Oxy, параллельной плоскости П. При плоскопараллельном движении все точки тела, лежащие на прямой ММ / , перпендикулярны к сечению (S), то есть к плоскости П движутся тождественно и в каждый момент времени имеют одинаковые скорости и ускорения. Поэтому для изучения движения всего тела достаточно изучить, как движется сечение S тела в плоскости Oxy.

 (4.1)
(4.1)
Уравнения (4.1) определяют закон происходящего движения и называются уравнениями плоскопараллельного движения твердого тела.
2. Разложение плоскопараллельного движения на поступательное
вместе с полюсом и вращательное вокруг полюса
Покажем, что плоское движение слагается из поступательного и вращательного. Для этого рассмотрим два последовательных положения I и II, которые занимает сечение Sдвижущегося тела в моменты времени t1 и t2= t1 + Δt. Легко видеть, что сечение S, а с ним и все тело можно привести из положения I в положение II следующим образом: переместим сначала тело поступательно, так, чтобы полюс А, двигаясь вдоль своей траектории, пришел в положение А2. При этом отрезок A1B1займет положение , а затем повернем сечение вокруг полюса А2 на угол Δφ1.

Следовательно, плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся так же как полюс А и из вращательного движения вокруг этого полюса.
При этом следует отметить, что вращательное движение тела происходит вокруг оси, перпендикулярной к плоскости П и проходящей через полюс А. Однако для краткости мы будем в дальнейшем называть это движение просто вращением вокруг полюса А.
Поступательная часть плоскопараллельного движения описывается, очевидно, первыми двумя из уравнений (2. 1), а вращение вокруг полюса А — третьим из уравнений (2. 1).
Основные кинематические характеристики плоского движения

В качестве полюса можно выбирать любую точку тела

Вывод : вращательная составляющая плоского движения от выбора полюса не зависит, следовательно, угловая скорость ω и угловое ускорение e являются общими для всех полюсов и называются угловой скоростью и угловым ускорением плоской фигуры
Векторы и направлены по оси, проходящей через полюс и перпендикулярной плоскости фигуры
 |  |
 |  |
3. Определение скоростей точек тела
Теорема: скорость любой точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг полюса.
При доказательстве будем исходить из того, что плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся со скоростью vА и из вращательного движения вокруг этого полюса. Чтобы разделить эти два вида движения, введем две системы отсчета: Oxy – неподвижную, и Ox1y1 – движущуюся поступательно вместе с полюсом А. Относительно подвижной системы отсчета движение точки М будет «вращательным вокруг полюса А».

Таким образом, скорость любой точки М тела геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости точки М в ее вращательном движении вместе с телом вокруг этого полюса.
Геометрическая интерпретация теоремы

Следствие 1. Проекции скоростей двух точек твердого тела на прямую, соединяющую эти точки, равны друг другу.
 |

 |  |
4. План скоростей
Планом скоростей называется диаграмма, на которой из произвольно выбранного полюса откладываются скорости точек, а вращательные скорости звеньев из плюса не выходят и располагаются перпендикулярно звеньям.
Построение плана скоростей базируется на соотношениях (3.6)

Откуда следует, что отрезки, соединяющие концы векторов скоростей на плане скоростей, перпендикулярны отрезкам, соединяющим соответствующие точки плана, и по модулю пропорциональны этим отрезкам, а их отношение равно угловой скорости плоской фигуры.
 (3. 6′)
(3. 6′)
Дифференциальные уравнения плоскопараллельного движения твердого тела

Дифференциальные уравнения плоского движения твердого тела
Уравнения плоского движения твердого тела (см. § 60) имеют вид:

где  и
и  — координаты произвольного полюса
— координаты произвольного полюса  относительно неподвижной системы координат и
относительно неподвижной системы координат и  — угол поворота тела вокруг выбранного полюса.
— угол поворота тела вокруг выбранного полюса.
Уравнения плоского движения твердого тела получаются наиболее просто, если за полюс принять центр  масс тела.
масс тела.
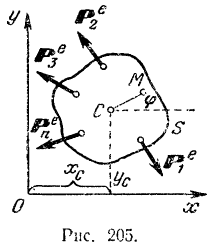
Рассечем мысленно тело плоскостью, параллельной данной неподвижной плоскости и проходящей через центр масс тела. Положение этого сечения  (рис. 205), а следовательно, и положение самого тела, будет определяться координатами
(рис. 205), а следовательно, и положение самого тела, будет определяться координатами  центра масс тела и углом поворота тела вокруг оси, проходящей через центр масс тела и перпендикулярной даyной неподвижной плоскости. Пусть на тело действуют внешние силы
центра масс тела и углом поворота тела вокруг оси, проходящей через центр масс тела и перпендикулярной даyной неподвижной плоскости. Пусть на тело действуют внешние силы

лежащие в плоскости сечения .
По теореме о движении центра масс (§ 89) имеем:

Так как по доказанному выше (§ 94) теорема об изменении кинетического момента системы приложима к движению системы относительно оси, проходящей через центр масс и движущейся поступательно вместе с центром масс, в той же форме, что и для неподвижной оси, то согласно уравнению (182), выведенному на основании этой теоремы, будем иметь:
где  — момент инерции тела относительно оси, проходящей через центр масс тела и перпендикулярной неподвижной плоскости,
— момент инерции тела относительно оси, проходящей через центр масс тела и перпендикулярной неподвижной плоскости,  — сумма моментов всех внешних сил, действующих на тело, относительно той же оси.
— сумма моментов всех внешних сил, действующих на тело, относительно той же оси.
Таким образом, дифференциальными уравнениями плоского движения тела будут:
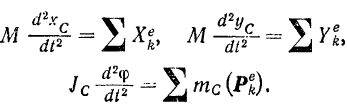
С помощью уравнений (183) по известным внешним силам, действующим на тело, можно определить закон его движения и, наоборот, зная закон движения тела, определить силы, действующие на тело.
Пример задачи:
Барабан однородной круглой катушки обмотан нитью так (рис. 206), что концы ее расходятся в противоположные стороны и натягиваются постоянными горизонтальными силами  и
и  . Вес катушки
. Вес катушки  , радиус катушки
, радиус катушки  , радиус ее барабана
, радиус ее барабана  и момент инерции катушки относительно оси симметрии, проходящей через центр
и момент инерции катушки относительно оси симметрии, проходящей через центр  тяжести катушки,
тяжести катушки,  Определить ускорение
Определить ускорение  оси катушки, предполагая, что она катится по горизонтальной плоскости без скольжения.
оси катушки, предполагая, что она катится по горизонтальной плоскости без скольжения.
Решение:
На катушку действуют внешние силы: ,  —- нормальная реакция плоскости и
—- нормальная реакция плоскости и  — сила трения катушки о горизонтальную плоскость. Очевидно, что под действием этих сил все точки катушки будут двигаться в плоскостях, параллельных неподвижной вертикальной плоскости
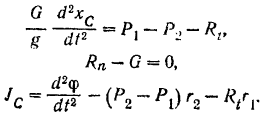
— сила трения катушки о горизонтальную плоскость. Очевидно, что под действием этих сил все точки катушки будут двигаться в плоскостях, параллельных неподвижной вертикальной плоскости  (рис. 206). Дифференциальные уравнения плоского движения катушки имеют вид:
(рис. 206). Дифференциальные уравнения плоского движения катушки имеют вид:
Проектируя все внешние силы, приложенные к катушке, на выбранные координатные оси и находя сумму моментов этих сил относительно оси, перпендикулярной к плоскости рисунка и проходящей через точку колеса, будем иметь:

При движении катушки


Подставляя найденные значения (II) и (III) в уравнения (I) получим:
Из уравнения (V) находим

Так как точка движется параллельно оси  , то алгебраическое значение ускорения этой точки равно
, то алгебраическое значение ускорения этой точки равно
Для его определения из уравнения (IV) нужно знать величину  . Так как катушка катится без скольжения, то нельзя считать
. Так как катушка катится без скольжения, то нельзя считать

т. е. равной максимальной величине силы трения. Это обязательно имеет место лишь в случае, когда катушка скользит по плоскости. При отсутствии же скольжения

Из уравнения (VI) имеем:

При качении катушки без скольжения мгновенным центром ее скоростей является точка касания колеса с плоскостью. Следовательно,
Подставляя значение (VIII) в равенство (VII), получаем:
Подставляя значение (IX) в уравнение (IV), будем иметь:

Решая последнее уравнение, находим искомое значение ускорения оси колеса:

Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Дифференциальные уравнения плоскопараллельного движения твердого тела
Дифференциальные уравнения плоскопараллельного движения твердого тела — раздел Философия, Теоретическая механикакраткий курс конспект лекций по теоретической механике При Изучении Кинематики Плоско-Параллельного Движения Твердого Тела За Полюс .
При изучении кинематики плоско-параллельного движения твердого тела за полюс можно принимать любую точку тела. При решении задач динамики за полюс всегда принимают центр масс тела, а в качестве подвижной системы отсчета используют систему Кенига.
Такой выбор связан, прежде всего, с тем, что теорема о движении центра масс позволяет получить дифференциальные уравнения, служащие для определения законов движения полюса – центра масс:
 (5.11)
(5.11)
Во-вторых, можно показать, что теорема об изменении кинетического момента относительно неподвижного центра сохраняет свой вид, если вместо неподвижного центра использовать центр масс механической системы. Так же справедлива теорема об изменении кинетического момента относительно любой оси  , проходящей через центр масс и движущейся поступательно. Учитывая, что при вращении тела
, проходящей через центр масс и движущейся поступательно. Учитывая, что при вращении тела

получаем дифференциальное уравнение, позволяющее определить закон вращения:
 (5.12)
(5.12)
где  – момент инерции тела относительно оси .
– момент инерции тела относительно оси .
Эта тема принадлежит разделу:
Теоретическая механикакраткий курс конспект лекций по теоретической механике
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования.. московский государственный строительный университет..
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Дифференциальные уравнения плоскопараллельного движения твердого тела
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
Все темы данного раздела:
Основные законы механики
Теоретическая механика относится к числу так называемых аксиоматических наук. В ее основе лежит система исходных положений – аксиом, принимаемых без доказательства, но проверенных не только прямыми
Аксиома 3
Две материальные точки взаимодействуют с силами, равными по модулю и направленными по одной прямой в противоположные стороны (Рис. 2). Аксиома 4(Принцип
Скорость точки
Быстроту движения точки характеризует ее скорость, к определению которой мы сейчас переходим. Пусть в момент времени
Ускорение точки
Быстроту изменения вектора скорости характеризует ускорение точки. Пусть в момент времени точка нах
Аксиома 3
Система двух сил, приложенная к абсолютно твердому телу, уравновешена (эквивалентна нулю) тогда и только тогда, когда эти силы равны по модулю и действуют по одной прямой в противоположные
Момент силы относительно точки
Пусть дана сила , приложенная в точке
Момент силы относительно оси
Моментом силы относительно оси называется проекция на ось момента силы, вычисленного относительно любой точки этой оси:
Пара сил
Парой сил называется система двух сил, равных по модулю и действующих по параллельным прямым в противоположные стороны. Плоскость, в ко
Дифференциальные уравнения движения механической системы
Рассмотрим механическую систему, состоящую из материальных точек. Для каждой точки системы в инерциальной системе о
Основные свойства внутренних сил
Рассмотрим две любые точки механической системы и
Теорема об изменении кинетического момента
Умножим каждое из уравнений (3.1) слева векторно на радиус–вектор соответствующей точки и сложим
Условия равновесия
Остановимся на вопросах равновесия материальных тел, которые составляют существенную часть раздела «Статика» курса теоретической механики. Под равновесием в механике традиционно
Равновесие системы сил, линии действия которых лежат в одной плоскости
Во многих практически интересных случаях тело находится в равновесии под действием системы сил, линии действия которых расположены в одной плоскости. Примем эту плоскость за координатную
Расчет ферм
Особое место в ряду статических задач занимает расчет ферм. Фермой называется жесткая конструкция из прямолинейных стержней (Рис.3.3). Если все стержни фермы и вся приложенная к ней
Равновесие тела при наличии трения
Как известно, при скольжении тела по опорной поверхности возникает сопротивление, тормозящее скольжение. Это явление учитывается путем введения в рассмотрение силы трения.
Центр параллельных сил
Это понятие вводится для системы параллельных сил, имеющих равнодействующую, причем точки приложения сил системы – точки
Центр тяжести тела
Рассмотрим материальное тело, расположенное вблизи поверхности Земли (в поле земного притяжения). Допустим сначала, что тело состоит из конечного числа материальных точек, другими словами – частиц,
Центр масс механической системы. Теорема о движении центра масс
Инерционные свойства материального тела определяются не только его массой, но и характером распределения этой массы в теле. Существенную роль в описании такого распределения играет положение центра
ЛЕКЦИЯ 5
5.1. Движение абсолютно твёрдого тела Одной из важнейших задач механики является описание движения абсолютно твердого тела. В общем случае различные точки
Поступательное движение твердого тела
Поступательным называется движение твердого тела, при котором любая прямая, проведенная в теле, остается параллельной своему первоначальному положению во все время движения.
Кинематика вращательного движения твердого тела
При вращательном движении в теле существует единственная прямая, все точки которой
Скоростью тела
Окончательно получаем: (5.4) Формула (5.4) называется формулой Эйлера. На Рис.5.
Дифференциальное уравнение вращательного движения твердого тела
Вращение твердого тела, как и любое другое движение, происходит в результате воздействия внешних сил. Для описания вращательного движения используем теорему об изменении кинетического момента относ
Кинематика плоскопараллельного движения твердого тела
Движение тела называется плоскопараллельным, если расстояние от любой точки тела до некоторой неподвижной (основной) плоскости остается неизменным во все время движения
Система Кенига. Первая теорема Кенига
(Изучить самостоятельно) Пусть система отсчета неподвижная (инерциальная). Система
Работа и мощность силы. Потенциальная энергия
Половина произведения массы точки на квадрат ее скорости называется кинетической энергией материальной точки. Кинетической энергией механической системы назы
Теорема об изменении кинетической энергии механической системы
Теорема об изменении кинетической энергии относится к числу общих теорем динамики наряду с доказанными ранее теоремами об изменении количества движения и изменения момента количеств
Работа внутренних сил геометрически неизменяемой механической системы
Заметим, что в отличие от теоремы об изменении количества движения и теоремы об изменении кинетического момента в теорему об изменении кинетической энергии в общем случае входят внутренние силы.
Вычисление кинетической энергии абсолютно твердого тела
Получим формулы для вычисления кинетической энергии абсолютно твердого тела при некоторых его движениях. 1. При поступательном движении в любой момент времени скорости всех точек тела один
Работа внешних сил, приложенных к абсолютно твердому телу
В разделе «Кинематика» установлено, что скорость любой точки твердого тела геометрически складывается из скорости точки, принятой за полюс, и скорости, полученной точкой при сферическом д
Работа силы тяжести
При вычислении работы силы тяжести будем считать, что мы рассматриваем ограниченную область пространства вблизи поверхности Земли, размеры которой малы по сравнению с размерами Земл
Работа упругой силы
Понятие упругой силы обычно ассоциируется с реакцией линейно–упругой пружины. Направим ось вдоль пр
Работа вращающего момента
Пусть сила приложена в некоторой точке тела, имеющего ось вращения. Тело вращается с угловой скорос
Возможные скорости и возможные перемещения
Понятия возможной скорости и возможного перемещения введем сначала для материальной точки, на которую наложена голономная удерживающая нестационарная связь. Возможной скоростью мат
Идеальные связи
Связи, наложенные на механическую систему, называются идеальными, если сумма работ всех реакций связей на любом возможном перемещении системы равна нулю:
Принцип возможных перемещений
Принцип возможных перемещений устанавливает условия равновесия механических систем. Под равновесием механической системы традиционно понимают состояние ее покоя по отношению к выбранной инерциально
Общее уравнение динамики
Рассмотрим механическую систему, состоящую из материальных точек, на которую наложены идеальные уде
http://lfirmal.com/differentsialnyie-uravneniya-ploskogo-dvizheniya-tverdogo-tela/
http://allrefs.net/c1/48y9z/p26/