2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления. В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях 2.2. Линеаризация уравнений динамики САУ (САР) 2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).
При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).
где: — стационарные значения входного и выходного воздействий; — отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.
Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:
где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:
где — сила тяжести; — сила сопротивления пружины, — сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):
Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть
перейдем к отклонениям от стационарного состояния: Пусть при t>0 . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
если , то уравнение принимает вид:
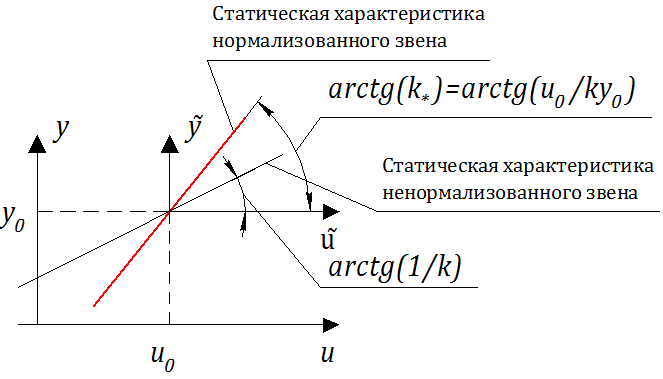
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).
Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:
тогда, разделив на k, имеем:
Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:
Таким образом, получаем, что: — коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени; — коэффициент перед второй производной: []; — коэффициент в правой части (): []. Тогда уравнение (2.1.6) можно записать в операторной форме:
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:
Подставляя эти соотношения в уравнение (2.1.2), имеем:
Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие , и, разделив на , получаем:
где: — коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента
Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:
где дифференциальные операторы.
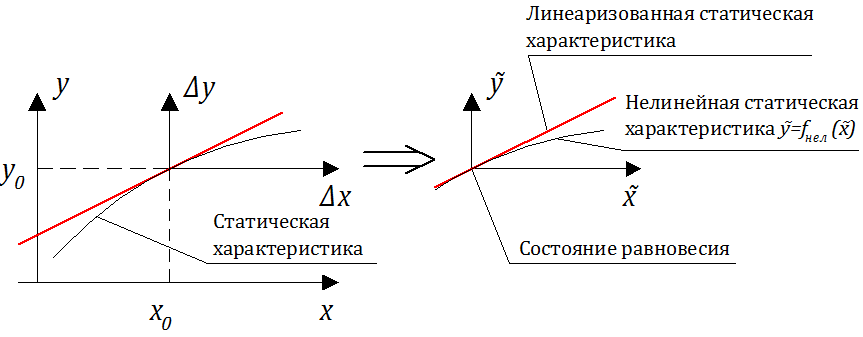
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
Нелинейностью статической характеристики.
Нелинейностью динамических членов в уравнениях динамики.
Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:
Перенесем в левую часть уравнения и запишем уравнение в виде%
где -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:
Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния .
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если , то «простое» разложение функции в ряд Тейлора в окрестности точки будет выглядеть так:
C учетом вышеприведенного разложение принимает вид:
Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.:), оставим в разложении только члены первого порядка малости (линейные). Поскольку , получаем:
Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:
Коэффициенты — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:
где – оператор дифференцирования; — линейный дифференциальный оператор степени n; — линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора :
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:
Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>
Если вынести в правой части (2.2.7) коэффициент за общую скобку и разделить все уравнение на , то уравнение принимает вид:
или в операторном виде:
Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.
Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:
Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:
• во-вторых, слагаемое в левой части — чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
Перейдем к безразмерным переменным (нормализованным);
Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:
Заметим, что: .
Подставляя значения x(t) и y(t) в исходное уравнение:
Удаляем полученного уравнения уравнения стационара: , а так же пренебрегая слагаемыми второго прядка малости: , получаем следующее уравнение:
Вводим новые обозначения:
Получаем уравнения в «почти» классическом виде:
Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:
Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Будем называть решение однородного дифференциального уравнения , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть , вынужденным, так как эта часть решения определяется внешним воздействием , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
Напомним этапы решения:
1) Если имеется уравнение вида , то сначала решаем однородное дифференциальное уравнение:
2) Записываем характеристическое уравнение:
3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 4) Тогда собственное решение записывается в виде:
если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:
Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:
5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы: а) По виду правой части. б) Методом вариации постоянных. в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения. .
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:
7) Используя начальные условия (t = 0), находим значения постоянных интегрирования . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если
где — неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем как:
Подставляя в исходное уравнение, имеем:
Суммируя , имеем:
Используя 1-е начальное условие (при t = 0), получаем: , а из 2-го начального условия имеем:
Решая систему уравнений относительно и , имеем: Тогда окончательно:
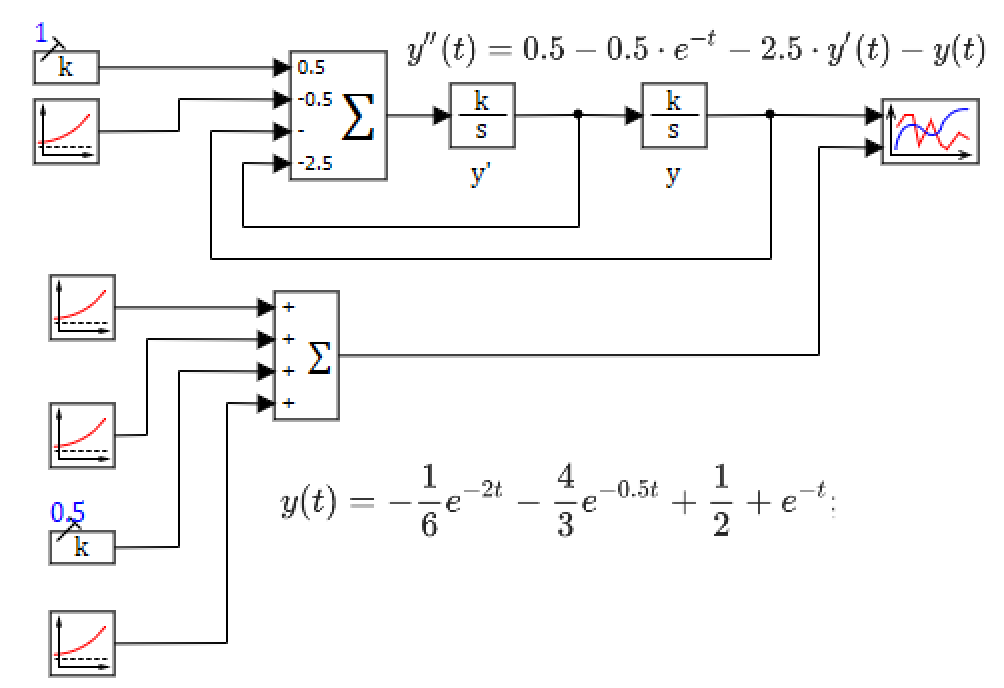
Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:
Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
Дифференциальные уравнения в теории управления
Образование:
График учебного процесса
Томская школа программистов
Новости
О факультете
Абитуриенту
Наука
Библиотека
Люди
Разное
Болонский процесс
Служба сервера
ФАКУЛЬТЕТ ИНФОРМАТИКИ. ПРОГРАММЫ КУРСОВ
Для специальности 351500 Срок действия документа (учебные годы): начало — 2003 ; конец —
Код дисциплины: ЕН.Ф.01.05,07
Аудиторных часов покурсамисеместрам
Лекции
Рекомендовано методической комиссией факультета информатики
Председатель методической комиссии
II. Содержание курса 1. Темы и краткое содержание Тема 1. Обыкновенные дифференциальные уравнения. Дифференциальные уравнения (ДУ). Основные понятия. Определение дифференциального уравнения. Обыкновенные дифференциальные уравнения и уравнения в частных производных. Порядок и степень дифференциального уравнения. Понятие решения дифференциального уравнения. Интегральная кривая, частно е решение, общее решение, интеграл дифференциального уравнения. Обыкновенные дифференциальные уравнения первого порядка. Уравнения, разрешенные относительно производной. Поле направлений касательных. Изоклины. Особые точки и особые решения ДУ. Уравнения с разделяющимися переменными и приводящиеся к ним. Однородные дифференциальные уравнения. Линейные уравнения первого порядка. Неоднородные уравнения. Метод вариации постоянных. Уравнения в полных дифференциалах. Теоремы существования и единственности решения дифференциального уравнения. Условия Липшица. Теорема о непрерывной зависимости решения от параметра и начальных условий. Теорема о дифференцируемости решений. Тема 2. Приближенные методы интегрирования ДУ. Задача Коши. Метод ломаных Эйлера. Понятие полного метрического пространства. Фундаментальные последовательности. Принцип сжатых отображений. Теорема о неподвижной точке. Метод последовательных приближений Пикара. Недостатки метода ломаных и метода последовательных приближений. Метод Эйлера с уравниванием (метода Хьюна). Методы Рунге-Кутты. Схема метода Рунге-Кутты второго порядка точности. Частные случаи. Схема метода Рунге-Кутты четвертого порядка точности. Понятие порядка точности приближенных методов решения ДУ. Определение по рядка точности метода ломаных Эйлера, метода Эйлера с уравниванием, методов Рунге-Кутты. Тема 3. Дифференциальные уравнения более высокого порядка. Система ДУ. Каноническая (нормальная) форма системы ДУ. Векторное ДУ. Фазовое пространство, фазовые переменные, фазовая кривая, фазовая траектория, фазовый портрет ДУ. Динамическая система. Общий интеграл и частное решение векторного ДУ. Начальная задача (задача Коши), двухточечная краевая задача (ДТКЗ), многоточечные краевые задачи. Теоремы существования и единственности решения задачи Коши для векторного ДУ. Линейные векторные ДУ (системы линейных ДУ). Теоремы существования и единственности для линейных векторных ДУ. Линейно независимые системы решений. Определитель Вронского и его свойства. Фундаментальная система решений. Тема 4. Линейные ДУ с постоянными коэффициентами. Матричная экспонента. Собственные векторы и собственные числа матрицы коэффициентов. Представление общего решения системы однородных ДУ с постоянными коэффициентами через собственные векторы и собственные числа матрицы коэффициентов. Фундаментальная система решений. Фундаментальная матрица. Представление решений однородной и неоднородной системы ДУ с постоянными коэффициентами через фундаментальную матрицу. Метод вариации постоянных. Теорема Лиувилля. Тема 5. . Операционное исчисление. Операционное исчисление Хевисайда. Оригиналы и изображения. Преобразование Лапласа. Основные формулы операционного исчисления (линейность преобразования Лапласа, изображение производных, теорема запаздывания). Теорема единственности. Интегрирование ДУ методами операционного исчисления. Тема 6. Автономные (консервативные) системы. Свойства автономных систем. Точка покоя (равновесия). Возможные типы фазовых траекторий автономных систем. Примеры автономных систем: модели “хищник — жертва” (уравнение Лотки-Вольтерра, уравнение Холлинга-Тэннера). Качественная теория автономных систем второго порядка. Линеаризация ДУ вблизи точки покоя. Поля скоростей и направлений исходных и линеаризованных уравнений. Точки покоя как особые точки. Их классификация (узел, фокус, центр, седловая точка) и свойства. Циклы. Точки бифуркации. Бифуркация рождения цикла (бифуркация Хопфа). Предельный цикл. Устойчивый и неустойчивый фокусы. Аттракторы и репеллеры. Тема 7. Теория устойчивости. Определение устойчивости по Ляпунову. Асимптотическая устойчивость. Неустойчивость. Второй метод Ляпунова. Теорема Ляпунова об устойчивости. Функция Ляпунова. Производная в силу системы ДУ (производная по направлению векторного поля скоростей, производная Ли). Теорема Ляпунова об асимптотической устойчивости. Теорема Четаева о неустойчивости. Устойчивость положения равновесия линейной однородной автономной системы. Теорема о необходимых и достаточных условиях асимптотической устойчивости. Устойчивость нелинейных автономных систем по линейному приближению. Теоремы Ляпунова и Четаева об устойчивости и неустойчивости по линейному приближению. Критерий устойчивости Рауса-Гурвица. Качественный анализ решений линейных (и линеаризованных) ДУ второго порядка по собственным числам матрицы коэффициентов (решениям характеристического уравнения). Тема 8. Первые интегралы ДУ (законы сохранения). Определение и свойства первых интегралов. Теоремы о первых интегралах. Связь первых интегралов с фазовым портретом системы и законами сохранения на примере уравнений Лотки-Вольтерра и линеаризованных уравнений Холлинга-Тэннера.
Тема 9. Вариационное исчисление. Вариационное исчисление. Понятие функционала. Классические задачи вариационного исчисления (задача о брахистохроне, изопериметрическая задача Дидоны, аэродинамическая задача Ньютона). Понятие банахова (полного линейного нормированного) пространства функций. Примеры банаховых пространств. Строгое определение функционала в банаховом пространстве. Функционалы интегрального, терминального и смешанного типов. Вариационные задачи Лагранжа, Больца, Майера. Понятия линейности, непрерывности и дифференцируемости функционала. Первая вариация функционала. Теорема о необходимом условии экстремума функционала. Экстремаль функционала. Сильный и слабый экстремумы. Простейшие задачи вариационного исчисления. Задача оптимизации интегрального функционала (задача Лагранжа). Задача с закрепленными концами. Допустимые функции. Дифференциальное уравнение Эйлера для экстремали. Основная лемма вариационного исчисления. Первый интеграл уравнения Эйлера. Двухточечная краевая задача (ДТКЗ) оптимизации функционала. Задача о брахистохроне. Задача с одним закрепленным и одним подвижным концами. Условия трансверсальности. Задача о брахистохроне при подвижном правом конце. Геометрический смысл условия трансверсальности. Задача со свободными (подвижными) концами. Общие условия трансверсальности. Смешанная задача оптимизации суммы интегрального и терминального функционалов (задача Больца). Уравнение Эйлера и условия трансверсальности для этой задачи. Задача оптимизации терминального функционала (задача Майера). Условия трансверсальности для этой задачи. Обобщение теорем об экстремуме интегрального функционала на случай векторных функций. Система уравнений Эйлера. Вариационные задачи на условный (связанный) экстремум. Типы связей и допустимые функции (кривые). Задача Лагранжа с конечными связями. Условие независимости связей. Неопределенные множители. Теорема о необходимых условиях экстремума. Уравнения Эйлера. Задача Лагранжа с дифференциальными связями. Задача Лагранжа с интегральными (изопериметрическими) связями. Пример решения изопериметрической задачи (задача Дидоны). Каноническая форма системы уравнений Эйлера. Функция Гамильтона и сопряженные (по Гамильтону) переменные.
Тема 10. Оптимальное управление.
Управляемые системы и пространство их состояний. Вектор управлений. Функционал качества управления. Ограничения на управления. Типы ограничений. Класс кусочно-непрерывных функций. Замкнутые ограниченные и компактные множества. Допустимые и оптимальные управления. Формулировка задач оптимального управления. Классические и неклассические вариационные задачи с дифференциальными связями. Принцип максимума Л.С.Понтрягина. Формулировка принципа максимума Понтрягина (теорема о необходимых условиях оптимальности управления и соответствующей ему траектории). Оптимальное управление в автономных системах, линейных по управлениям. Релейные (кусочно-постоянные) управления. Точки переключения управлений. Оптимальное управление в линейных и линеаризованных системах. Задачи максимального быстродействия. Визуально-интерактивный метод отыскания точек переключения управлений. Примеры оптимальных по быстродействию систем (управление численностью популяций в системе “хищник-жертва”, описываемой уравнениями Лотки-Вольтерра и Холлинга-Тэннера, максимально быстрая “мягкая” посадка космического аппарата на поверхность планеты и др.). Принцип оптимальности Р.Беллмана. Условия оптимальности в форме уравнения Беллмана. Связь принципа максимума Л.С.Понтрягина с принципом максимума Р.Беллмана. Аналитическое конструирование оптимальных регуляторов в линейных системах. Управляемость и наблюдаемость линейных систем. Оптимальное управление в форме обратной связи. Задача Летова. Уравнение Риккати. Устойчивость замкнутых систем управления. Другие задачи оптимального управления.
Примерная тематика рефератов, курсовых работ – курсовой проект не предусмотрен. Ш. Распределение часов курса по темам и видам работ
№№ пп
Наименование тем
Всего часов
лекции
семинары
лабораторные занятия
1
Обыкновенные дифференциальные уравнения (ДУ)
10
8
2
Приближенные ме-тоды интегрирова-ния ДУ
8
10
3
ДУ более высокого порядка
6
6
4
Линейные ДУ с постоянными коэффициентами
8
10
5
Операционное исчисление
8
4
6
Автономные (кон-сервативные) системы
6
8
7
Теория устойчивости
6
10
8
Первые интегралы ДУ
4
9
Вариационное исчисление
6
6
10
Оптимальное управление
8
8
ИТОГО
IV.Форма итогового контроля – зачет, экзамен
V.Учебно-методическое обеспечение курса 1. Рекомендуемая литература (основная) 1. Эльсгольц Л.Э. Дифференциальные уравнения и вариационное исчисление. – М.: Наука, 1965. – 424 с. 2. Степанов В.В. Курс дифференциальных уравнений. – М.: ГИФМЛ, 1959. – 468 с. 3. Федорюк М.В.Обыкновенные дифференциальные уравнения. – М.: Наука, 1980. – 352 с. 4. Эрроусмит Д., Плейс К. Обыкновенные дифференциальные уравнения. Качественная теория с приложениями. – М.: Мир, 1986. –244 с. 5. Ортега Дж., Пул У. Введение в численные методы решения дифференциальных уравнений. – М.:Наука, 1986. – 288 с. 6. Петровский И.Г. Лекции по теории обыкновенных дифференциальных уравнений.– М.: Наука, 1970. 7. Матвеев Н.М. Методы интегрирования обыкновенных дифференциальных уравнений. – М.: Высшая Школа, 1963. – 548 с. 8. Гогейзель Г. Обыкновенные дифференциальные уравнения. – М.–Л.: ОНТИ, 1937. – 128 с. 9. Хайрер Э., Нерсетт С., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи. – М.: Мир, 1990. – 512 с. 10. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В.,Мищенко Е.Ф. Математическая теория оптимальных процессов. – М.: Наука, 1976. – 392 с. 11. Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория конструирования систем управления. – М.: Высшая Школа, 1998. – 574 с. 12. Алексеев В.М., Тихомиров В.М., Фомин С.В. Оптимальное управление. – М.: Наука, 1972. – 432 с. 13. Ройтенберг Я.Н. Автоматическое управление. – М.: Наука, 1971. – 396 с. 14. Бублик Б.Н., Кириченко Н.Ф. Основы теории управления. – Киев: Вища Школа, 1975. – 328 с. 15. Гноенский Л.С.,Каменский Г.А., Эльсгольц Л.Э. Математические основы теории управляемых систем. – М.: Наука, 1969. – 512 с. 16. Федоренко Р.П. Приближенное решение задач оптимального управления. – М.: Наука, 1978. – 488 с. 17. Справочник по теории автоматического управления /Под ред. А.А.Красовского. – М.: Наука, 1987. – 712 с. 18. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления. – М.: Мир, 1977. – 656 с. 19. Воронов А.А. Устойчивость, управляемость, наблюдаемость. – М.: Наука, 1979. – 336 с. 20. Беллман Р. Динамическое программирование. – М.: ИИЛ, 1960. – 400 с. 2. Дополнительной литературы не требуется.
Авторы (составители) профессор кафедры прикладной информатики Томского государственного университета Поддубный В.В. Практические и семинарские занятия
По курсу практические занятия не предусмотрены.
2.3. Лабораторные работы Часть 1. Дифференциальные уравнения Лабораторная работа №1. Метод ломаных Эйлера. Программная реализация метода ломаных. Наблюдение на экране дисплея интегральных кривых и фазовых траекторий, полученных методом ломаных. Исследование сходимости метода. Исследование зависимости точности решения от величины шага интегрирования и интервала интегрирования. Графическое (визуальное) сравнение последовательности интегральных кривых и фазовых траекторий с решением, получаемым стандартной процедурой метода Рунге–Кутты порядка точности 4–5 с заданной (высокой) точностью. Иллюстрация работы метода ломаных Эйлера на первых двух шагах в увеличенном масштабе (с большим шагом). Лабораторная работа №2. Метод Эйлера c уравниванием (метод Хьюна). Программная реализация метода Эйлера с уравниванием. Наблюдение на экране дисплея интегральных кривых и фазовых траекторий, полученных этим методом. Исследование сходимости метода. Исследование зависимости числа итераций от требуемой точности решения, от времени, от величины шага интегрирования. Построение семейства графиков зависимостей числа итераций от времени при различных значениях величины шага интегрирования. Исследование зависимости точности решения от величины шага интегрирования. Графическое (визуальное) сравнение интегральных кривых и фазовых траекторий с решением, получаемым стандартной процедурой метода Рунге-Кутты порядка точности 4-5 с заданной (высокой) точностью. Иллюстрация работы метода Эйлера с уравниванием на первых двух шагах в увеличенном масштабе (с большим шагом). Сравнение с методом ломаных Эйлера. Лабораторная работа №3. Методы Рунге-Кутты 2–4 порядков точности. Программная реализация методов Рунге–Кутты. Наблюдение на экране дисплея интегральных кривых и фазовых траекторий, полученных этими методами. Графическое (визуальное) сравнение интегральных кривых и фазовых траекторий с решением, получаемым стандартной процедурой метода Рунге–Кутты порядка точности 4–5 с заданной (высокой) точностью. Наблюдение полного совпадения решений. Исследование сходимости методов. Исследование зависимости числа итераций (дробления шага интегрирования) от требуемой точности решения и от величины начального шага интегрирования. Построение графической зависимости числа шагов интегрирования от требуемой точности решения и фактической точности решения от числа шагов интегрирования. Совмещение графиков зависимостей фактической точности решения от числа шагов интегрирования для методов Рунге–Кутты 2, 3 и 4 порядков точности. Сравнение точности различных схем метода Рунге–Кутты между собой, с методом ломаных Эйлера и с методом Эйлера с уравниванием. Лабораторная работа №4. Интегральные кривые, фазовые портреты, поля скоростей и направлений. Построение интегральных кривых и фазовых траекторий решений дифференциальных уравнений при различных начальных условиях, как включающих, так и не включающих точки покоя. Наблюдение особых точек. Построение полей скоростей и полей направлений касательных к фазовым траекториям и интегральным кривым. Качественное исследование решений дифференциальных уравнений по полям скоростей и направлений. Исследование в режиме наложения графиков интегральных кривых и фазовых траекторий на поля скоростей и направлений. Исследование характера особых точек. Наблюдение различного характера поведения решений в окрестности центра и узла. Лабораторная работа №5. Линеаризованные уравнения. Программная реализация решений линеаризованных (относительно точек покоя) систем дифференциальных уравнений. Построение фундаментальных матриц решений линеаризованных автономных систем через собственные векторы и собственные значения матриц коэффициентов. Построение точного решения задачи Коши для линеаризованных уравнений с использованием фундаментальных матриц решений. Сравнение точных решений линеаризованных уравнений с решениями, получаемыми методом Рунге–Кутты для линеаризованных и исходных нелинейных уравнений. Сравнение решений линеаризованных и соответствующих нелинейных уравнений при различных начальных условиях, вблизи и вдали от точки линеаризации. Исследование особых точек линеаризованных уравнений в сравнении с нелинеаризованными при различных значениях параметров систем. Наблюдение явления бифуркации решений. Исследование поведения решений вблизи точки бифуркации. Наблюдение циклов, аттракторов, репеллеров, предельных циклов. Лабораторная работа №6. Первый интеграл. Программная реализация функций, выражающих первые интегралы уравнения Лотки–Вольтерры и линеаризованного уравнения Холлинга–Тэннера. Наблюдение поверхностей этих функций и проекций их горизонтальных сечений (линий фиксированного уровня) на фазовую плоскость. Наложение на линии уровня фазовых траекторий, соответствующих выбранным (интерактивно) начальным условиям. Наблюдение совпадения или подобия кривых. Вычисление первого интеграла на интегральной кривой. Наблюдение постоянства первого интеграла во времени. Интерпретация наблюдаемых законов сохранения. Лабораторная работа №7. Устойчивость и второй метод Ляпунова. Исследование орбитальной устойчивости решений нелинейных и линеаризованных дифференциальных уравнений. Решение матричного уравнения Ляпунова для линеаризованных уравнений. Исследование устойчивости решений этих уравнений вторым методом Ляпунова (по поведению квадратичной функции Ляпунова и ее производной Ли – производной в силу системы – на решениях задачи Коши при начальных условиях вблизи точек покоя). Графическое представление функции Ляпунова и ее полной производной по времени на траектории системы. Сравнение результатов исследования устойчивости вторым методом Ляпунова с результатами, полученными по критерию Рауса-Гурвица. Лабораторная работа №8. Задача о брахистохроне. Программная реализация решения задачи о брахистохроне при закрепленных концах траектории и при свободном правом конце. Построение брахистохроны (сегмента циклоиды) по задаваемым (интерактивно) точкам ее начала и конца. Вычисление времени спуска по брахистохроне и хорде (прямой, соединяющей начальную и конечную точки). Сравнение времен спуска.
Дифференциальные уравнения, динамические системы и оптимальное управление
РОССИЙСКАЯ АКАДЕМИЯ НАУК
Сибирского отделения Российской академии наук
Ученым советом Института
Протокол № 5 от 01.01.2001 г.
Председатель Ученого совета
РАБОЧАЯ ПРОГРАММА ДИСЦИПЛИНЫ
Дифференциальные уравнения, динамические системы и оптимальное управление
Специальность 01.01.02 – «Дифференциальные уравнения, динамические системы и
1. Цели и задачи дисциплины
Цель изучения дисциплины – изучить фундаментальные основы весьма разветвленного базового курса, позволяющие вести исследования по различным научным направлениям специальности.
Задачи дисциплины охватывают основные понятия, результаты и качественные методы исследования обыкновенных и распределенных дифференциальных и динамических систем, вариационного исчисления и оптимального управления.
2. Место дисциплины в структуре ООП
Данная дисциплина относится к группе обязательных дисциплин отрасли науки и научной специальности образовательной компоненты ООП ППО (в соответствии с Федеральными государственными требованиями (ФГТ)).
Содержание дисциплины базируется на знаниях, приобретенных в курсах математического анализа, линейной алгебры, обыкновенных дифференциальных уравнений, математической физики и методов оптимизации (с началами вариационного исчисления и оптимального управления).
3. Требования к уровню освоения содержания дисциплины.
В результате изучения дисциплины аспиранты должны:
· иметь представление о различных понятиях классических и обобщенных решений дифференциальных уравнений, систем и включений, об условиях их локального и глобального существования;
· знать основы теории устойчивости по Ляпунову (первый и второй методы), корректности краевых задач для уравнений и систем в частных производных;
· иметь представление о качественных задачах теории динамических систем и методах их решения;
· знать основы классического вариационного исчисления (метод вариации, уравнение Эйлера-Лагранжа, условие Вейерштрасса) и оптимального управления (принцип максимума Понтрягина, метод динамического программирования Беллмана и его обобщения – метод неравенств Гамильтона-Якоби);
· иметь представление о классических и типовых прикладных моделях данной дисциплины;
· уметь находить решения управляемых систем с разрывными программными и позиционными управлениями;
· уметь применять ПМ для решения линейных задач оптимального управления;
· уметь решать классические линейно-квадратичные задачи, пользуясь ПМ и методом Беллмана;
· уметь находить экстремали в типовых нелинейных задачах малой размерности, охватывающих известные прикладные модели – управления лимитированной популяцией, оптимального экономического роста (Рамсея и Солоу), в навигационной задаче Цермело, в задаче Годдарда о максимальном подъем ракеты, в изопериметрической задаче и т. п.
· уметь проверять канонические достаточные условия оптимальности с линейными и линейно-квадратичными проверочными функциями для исследования известной экстремали задачи.
4. Структура и содержание дисциплины
Общая трудоемкость дисциплины составляет 2 зачетные единицы, 72 часа.



 — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;  — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.


 — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)

 . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
 , то уравнение принимает вид:
, то уравнение принимает вид:







 ];
];  ): [
): [ ].
].  , что эквивалентно
, что эквивалентно
 — оператор диффренцирования;
— оператор диффренцирования;  -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную
— линейный дифференциальный оператор, вырожденный в константу, равную 


 , и, разделив на
, и, разделив на  , получаем:
, получаем:

 — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.


 дифференциальные операторы.
дифференциальные операторы. , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).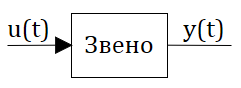

 в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%
 -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
 .
. , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

 ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:


 — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
 – оператор дифференцирования;
– оператор дифференцирования; 


 за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:





 — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
 .
.
 , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:








 — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$ , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена). , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
 , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:





 .
.
 .
. 

 ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:
 — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования. как:
как:

 , имеем:
, имеем: 
 , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
 и
и  , имеем:
, имеем: 




 Образование:
Образование: Новости
Новости