Динамическое уравнение гармонических колебаний пружинного маятника
Простейшими из колебаний являются гармонические. Это колебания, при которых колеблющаяся величина изменяется со временем по закону синуса или косинуса.
Рассмотрим пружинный маятник (Рис. 1.7.1).
Рис. 1.7.1. Пружинный маятник
В состоянии покоя сила тяжести уравновешивается упругой силой:
 | (1.7.1) |
Если сместить шарик от положения равновесия на расстояние х, то удлинение пружины станет равным Δl0 + х. Тогда результирующая сила примет значение:
 | (1.7.2) |
Учитывая условие равновесия (1.7.1), получим:
 | (1.7.3) |
Знак «минус» показывает, что смещение и сила имеют противоположные направления.
Упругая сила f обладает следующими свойствами:
- Она пропорциональна смещению шарика из положения равновесия;
- Она всегда направлена к положению равновесия.
Для того, чтобы сообщить системе смещение х, нужно совершить против упругой силы работу:
 | (1.7.4) |
Эта работа идет на создание запаса потенциальной энергии системы:
 | (1.7.5) |
Под действием упругой силы шарик будет двигаться к положению равновесия со все возрастающей скоростью  . Поэтому потенциальная энергия системы будет убывать, зато возрастает кинетическая энергия
. Поэтому потенциальная энергия системы будет убывать, зато возрастает кинетическая энергия  (массой пружины пренебрегаем). Придя в положение равновесия, шарик будет продолжать двигаться по инерции. Это — замедленное движение и прекратится тогда, когда кинетическая энергия полностью перейдет в потенциальную. Затем такой же процесс будет протекать при движении шарика в обратном направлении. Если трение в системе отсутствует, шарик будет колебаться неограниченно долго.
(массой пружины пренебрегаем). Придя в положение равновесия, шарик будет продолжать двигаться по инерции. Это — замедленное движение и прекратится тогда, когда кинетическая энергия полностью перейдет в потенциальную. Затем такой же процесс будет протекать при движении шарика в обратном направлении. Если трение в системе отсутствует, шарик будет колебаться неограниченно долго.
Уравнение второго закона Ньютона в этом случае имеет вид:
 | (1.7.6) |
Преобразуем уравнение так:
 | (1.7.7) |
Вводя обозначение  , получим линейное однородное дифференциальное уравнение второго порядка:
, получим линейное однородное дифференциальное уравнение второго порядка:
 | (1.7.8) |
Прямой подстановкой легко убедиться, что общее решение уравнения (1.7.8) имеет вид:
 | (1.7.9) |
где а — амплитуда и φ — начальная фаза колебания — постоянные величины. Следовательно, колебание пружинного маятника является гармоническим (Рис. 1.7.2).
Рис. 1.7.2. Гармоническое колебание
Вследствие периодичности косинуса различные состояния колебательной системы повторяются через определенный промежуток времени (период колебаний) Т, за который фаза колебания получает приращение 2π. Рассчитать период можно с помощью равенства:
 | (1.7.10) |
 | (1.7.11) |
Число колебаний в единицу времени называется частотой:
 | (1.7.12) |
За единицу частоты принимается частота такого колебания, период которого равен 1 с. Такую единицу называют 1 Гц.
Из (1.7.11) следует, что:
 | (1.7.13) |
Следовательно, ω0 — это число колебаний, совершаемое за 2π секунд. Величину ω0 называют круговой или циклической частотой. Используя (1.7.12) и (1.7.13), запишем:
 | (1.7.14) |
Дифференцируя (1.7.9) по времени, получим выражение для скорости шарика:
 | (1.7.15) |
Из (1.7.15) следует, что скорость также изменяется по гармоническому закону и опережает смещение по фазе на ½π. Дифференцируя (1.7.15), получим ускорение:
 | (1.7.16) |
1.7.2. Математический маятник
Математическим маятником называют идеализированную систему, состоящую из нерастяжимой невесомой нити, на которой подвешено тело, вся масса которого сосредоточена в одной точке.
Отклонение маятника от положения равновесия характеризуют углом φ, образованным нитью с вертикалью (Рис. 1.7.3).
Рис. 1.7.3. Математический маятник
При отклонении маятника от положения равновесия возникает вращательный момент, который стремится вернуть маятник в положение равновесия:
 | (1.7.17) |
Напишем для маятника уравнение динамики вращательного движения, учитывая, что момент его инерции равен ml 2 :
 | (1.7.18) |
Это уравнение можно привести к виду:
 | (1.7.19) |
Ограничиваясь случаем малых колебаний sinφ ≈ φ и вводя обозначение:
 | (1.7.20) |
уравнение (1.7.19) может быть представлено так:
 | (1.7.21) |
что совпадает по форме с уравнением колебаний пружинного маятника. Следовательно, его решением будет гармоническое колебание:
 | (1.7.22) |
Из (1.7.20) следует, что циклическая частота колебаний математического маятника зависит от его длины и ускорения свободного падения. Используя формулу для периода колебаний (1.7.11) и (1.7.20), получим известное соотношение:
 | (1.7.23) |
1.7.3. Физический маятник
Физическим маятником называется твердое тело, способное совершать колебания вокруг неподвижной точки, не совпадающей с центром инерции. В положении равновесия центр инерции маятника С находится под точкой подвеса О на одной с ней вертикали (Рис. 1.7.4).
Рис. 1.7.4. Физический маятник
При отклонении маятника от положения равновесия на угол φ возникает вращательный момент, который стремится вернуть маятник в положение равновесия:
| (1.7.24) |
где m — масса маятника, l — расстояние между точкой подвеса и центром инерции маятника.
Напишем для маятника уравнение динамики вращательного движения, учитывая, что момент его инерции равен I:
 | (1.7.25) |
Для малых колебаний sinφ ≈ φ. Тогда, вводя обозначение:
 | (1.7.26) |
 | (1.7.27) |
что также совпадает по форме с уравнением колебаний пружинного маятника. Из уравнений (1.7.27) и (1.7.26) следует, что при малых отклонениях физического маятника от положения равновесия он совершает гармоническое колебание, частота которого зависит от массы маятника, момента инерции и расстояния между осью вращения и центром инерции. С помощью (1.7.26) можно вычислить период колебаний:
 | (1.7.28) |
Сравнивая формулы (1.7.28) и (1.7.23) получим, что математический маятник с длиной:
 | (1.7.29) |
будет иметь такой же период колебаний, что и рассмотренный физический маятник. Величину (1.7.29) называют приведенной длиной физического маятника. Следовательно, приведенная длина физического маятника — это длина такого математического маятника, период колебаний которого равен периоду колебаний данного физического маятника.
Точка на прямой, соединяющей точку подвеса с центром инерции, лежащая на расстоянии приведенной длины от оси вращения, называется центром качания физического маятника. По теореме Штайнера момент инерции физического маятника равен:
 | (1.7.30) |
где I0 — момент инерции относительно центра инерции. Подставляя (1.7.30) в (1.7.29), получим:
 | (1.7.31) |
Следовательно, приведенная длина всегда больше расстояния между точкой подвеса и центром инерции маятника, так что точка подвеса и центр качания лежат по разные стороны от центра инерции.
1.7.4. Энергия гармонических колебаний
При гармоническом колебании происходит периодическое взаимное превращение кинетической энергии колеблющегося тела Ек и потенциальной энергии Еп, обусловленной действием квазиупругой силы. Из этих энергий слагается полная энергия Е колебательной системы:
 | (1.7.32) |
Распишем последнее выражение
 | (1.7.33) |
Но к = mω 2 , поэтому получим выражение для полной энергии колеблющегося тела
 | (1.7.34) |
Таким образом полная энергия гармонического колебания постоянна и пропорциональна квадрату амплитуды и квадрату круговой частоты колебания.
1.7.5. Затухающие колебания .
При изучении гармонических колебаний не учитывались силы трения и сопротивления, которые существуют в реальных системах. Действие этих сил существенно изменяет характер движения, колебание становится затухающим .
Если в системе кроме квазиупругой силы действуют силы сопротивления среды (силы трения), то второй закон Ньютона можно записать так:
 . . | (1.7.34.а) |
Для решения этого дифференциального уравнения необходимо знать, от каких параметров зависит сила трения. Обычно предполагают, что при не очень больших амплитудах и частотах сила трения пропорциональна скорости движения и, естественно, направлена противоположно ей:
 , , | (1.7.34.б) |
где r – коэффициент трения, характеризующий свойства среды оказывать сопротивление движению. Подставим (1.7.34б) в (1.7.34а):
 , , | (1.7.34.в) |
где  β – коэффициент затухания; ω 0 – круговая частота собственных колебаний системы.
β – коэффициент затухания; ω 0 – круговая частота собственных колебаний системы.
Решение уравнения(1.7.34.в) существенно зависит от знака разности:  , где ω – круговая частота затухающих колебаний. При
, где ω – круговая частота затухающих колебаний. При  круговая частота ω является действительной величиной и решение (1.7.34.в) будет следующим:
круговая частота ω является действительной величиной и решение (1.7.34.в) будет следующим:
 . . | (1.7.35) |
График этой функции показан на рис.1.7.5 сплошной кривой 1, а штриховой линией 2 изображено изменение амплитуды:
 . . | (1.7.35.а) |
Период затухающих колебаний зависит от коэффициента трения и определяется формулой
 . . | (1.7.35.б) |
При очень малом трении  период затухающего колебания близок к периоду незатухающего свободного колебания (1.7.35.б)
период затухающего колебания близок к периоду незатухающего свободного колебания (1.7.35.б)
 |  |
| Рис.1.7.5. Затухающее колебание | Рис.1.7.6. Апериодический процесс |
Быстрота убывания амплитуды колебаний определяется коэффициентом затухания : чем больше β, тем сильнее тормозящее действие среды и тем быстрее уменьшается амплитуда. На практике, степень затухания часто характеризуют логарифмическим декрементом затухания , понимая под этим величину, равную натуральному логарифму отношения двух последовательных амплитуд колебаний, разделенных интервалом времени, равным периоду колебаний:
 ;
;
Следовательно, коэффициент затухания и логарифмический декремент затухания связаны достаточно простой зависимостью:
| λ=βT . | (1.7.37) |
При сильном затухании  из формулы (1.7.37) видно, что период колебания является мнимой величиной. Движение в этом случае уже называется апериодическим . График апериодического движения в виде показан на рис. 1.7.6. Незатухающие и затухающие колебания называют собственными или свободными . Они возникают вследствие начального смещения или начальной скорости и совершаются при отсутствии внешнего воздействия за счет первоначально накопленной энергии.
из формулы (1.7.37) видно, что период колебания является мнимой величиной. Движение в этом случае уже называется апериодическим . График апериодического движения в виде показан на рис. 1.7.6. Незатухающие и затухающие колебания называют собственными или свободными . Они возникают вследствие начального смещения или начальной скорости и совершаются при отсутствии внешнего воздействия за счет первоначально накопленной энергии.
1.7.6. Вынужденные колебания. Резонанс .
Вынужденными колебаниями называются такие, которые возникают в системе при участии внешней силы, изменяющейся по периодическому закону.
Предположим, что на материальную точку кроме квазиупругой силы и силы трения действует внешняя вынуждающая сила
 ,
,
где F 0 – амплитуда; ω – круговая частота колебаний вынуждающей силы. Составим дифференциальное уравнение (второй закон Ньютона):
 ,
,
 , , | (1.7.38) |
где  .
.
Решение дифференциального уравнения (3.19) является суммой двух колебаний: затухающих и незатухающих с амплитудой
 , , | (1.7.39) |
Амплитуда вынужденного колебания (1.7.39) прямо пропорциональна амплитуде вынуждающей силы и имеет сложную зависимость от коэффициента затухания среды и круговых частот собственного и вынужденного колебания. Если ω 0 и β для системы заданы, то амплитуда вынужденных колебаний имеет максимальное значение при некоторой определенной частоте вынуждающей силы, называемой резонансной .
Само явление – достижение максимальной амплитуды для заданных ω 0 и β – называют резонансом.
 |
| Рис. 1.7.7. Резонанс |
При отсутствии сопротивления  амплитуда вынужденных колебаний при резонансе бесконечно большая. При этом из ω рез =ω 0 , т.е. резонанс в системе без затухания наступает тогда, когда частота вынуждающей силы совпадает с частотой собственных колебаний. Графическая зависимость амплитуды вынужденных колебаний от круговой частоты вынуждающей силы при разных значениях коэффициента затухания показана на рис. 5.
амплитуда вынужденных колебаний при резонансе бесконечно большая. При этом из ω рез =ω 0 , т.е. резонанс в системе без затухания наступает тогда, когда частота вынуждающей силы совпадает с частотой собственных колебаний. Графическая зависимость амплитуды вынужденных колебаний от круговой частоты вынуждающей силы при разных значениях коэффициента затухания показана на рис. 5.
Механический резонанс может быть как полезным, так и вредным явлением. Вредное действие резонанса связано главным образом с разрушением, которое он может вызвать. Так, в технике, учитывая разные вибрации, необходимо предусматривать возможные возникновения резонансных условий, в противном случае могут быть разрушения и катастрофы. Тела обычно имеют несколько собственных частот колебаний и соответственно несколько резонансных частот.
Если коэффициент затухания внутренних органов человека был бы не велик, то резонансные явления, возникшие в этих органах под воздействием внешних вибраций или звуковых волн, могли бы привести к трагическим последствиям: разрыву органов, повреждению связок и т.п. Однако такие явления при умеренных внешних воздействиях практически не наблюдаются, так как коэффициент затухания биологических систем достаточно велик. Тем не менее резонансные явления при действии внешних механических колебаний происходят во внутренних органах. В этом, видимо, одна из причин отрицательного воздействия инфразвуковых колебаний и вибраций на организм человека.
1.7.7. Автоколебания
Существуют и такие колебательные системы, которые сами регулируют периодическое восполнение растраченной энергии и поэтому могут колебаться длительное время.
Незатухающие колебания, существующие в какой-либо системе при отсутствии переменного внешнего воздействия, называются автоколебаниями , а сами системы – автоколебательными.
Амплитуда и частота автоколебаний зависят от свойств в самой автоколебательной системе, в отличие от вынужденных колебаний они не определяются внешними воздействиями.
 |
| Рис. 1.7.8. Блок-схема автоколебаний |
Во многих случаях автоколебательные системы можно представить тремя основными элементами (рис.1.7.8): 1) собственно колебательная система; 2) источник энергии; 3) регулятор поступления энергии в собственно колебательную систему. Колебательная система каналом обратной связи (рис. 6) воздействует на регулятор, информирую регулятор о состоянии этой системы.
Классическим примером механической автоколебательной системы являются часы, в которых маятник или баланс являются колебательной системой, пружина или поднятая гиря – источником энергии, а анкер – регулятором поступления энергии от источника в колебательную систему.
Многие биологические системы (сердце, легкие и др.) являются автоколебательными. Характерный пример электромагнитной автоколебательной системы – генераторы автоколебательных колебаний.
1.7.8. Сложение колебаний одного направления
Рассмотрим сложение двух гармонических колебаний одинакового направления и одинаковой частоты:
x 1 =a 1 cos(ω 0 t + α 1 ), x 2 =a 2 cos(ω 0 t + α 2 ).
Гармоническое колебание можно задать с помощью вектора, длина которого равна амплитуде колебаний, а направление образует с некоторой осью угол, равный начальной фазе колебаний. Если этот вектор вращается с угловой скоростью ω 0 , то его проекция на выбранную ось будет изменяться по гармоническому закону. Исходя из этого, выберем некоторую ось Х и представим колебания с помощью векторов а 1 и а 2 (рис.1.7.9).
 |
| Рис.1.7.9 |
Вектор а является суммой векторов а 1 и а 2 . Проекция вектора а на ось Х равна сумме проекций векторов а 1 и а 2 :
Следовательно, вектор а представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью, что и векторы а 1 и а 2 . Таким образом, результирующее движение представляет собой гармоническое колебание с частотой ω 0 , амплитудой а и начальной фазой α. Используя теорему косинусов, находим значение амплитуды результирующего колебания:
 | (1.7.40) |
Из рис.1.7.6 следует, что
 .
.
Схемы, в которых колебания изображаются графически в виде векторов на плоскости, называются векторными диаграммами.
Из формулы 1.7.40 следует. Что если разность фаз обоих колебаний равна нулю, амплитуда результирующего колебания равна сумме амплитуд складываемых колебаний. Если разность фаз складываемых колебаний равна  , то амплитуда результирующего колебания равна
, то амплитуда результирующего колебания равна  . Если частоты складываемых колебаний не одинаковы, то векторы, соответствующие этим колебаниям будут вращаться с разной скоростью. В этом случае результирующий вектор пульсирует по величине и вращается с непостоянной скоростью. Следовательно, в результате сложения получается не гармоническое колебание, а сложный колебательный процесс.
. Если частоты складываемых колебаний не одинаковы, то векторы, соответствующие этим колебаниям будут вращаться с разной скоростью. В этом случае результирующий вектор пульсирует по величине и вращается с непостоянной скоростью. Следовательно, в результате сложения получается не гармоническое колебание, а сложный колебательный процесс.
1.7.9. Биения
Рассмотрим сложение двух гармонических колебаний одинакового направления мало отличающихся по частоте. Пусть частота одного из них равна ω , а второго ω+∆ω, причем ∆ω 1 =a cos ωt, x 2 =a cos(ω+∆ω)t.
Сложив эти выражения и используя формулу для суммы косинусов, получаем:
 | (1.7.41) |
(во втором множителе пренебрегаем членом  по сравнению с ω). График функции (1.7.41) изображен на рис. 1.7.10.
по сравнению с ω). График функции (1.7.41) изображен на рис. 1.7.10.
 |
| Рис.1.7.10 |
Колебания (1.7.41) можно рассматривать как гармоническое колебание частотой ω, амплитуда которого изменяется по закону  . Эта функция является периодической с частотой в два раза превышающей частоту выражения, стоящего под знаком модуля, т.е. с частотой ∆ω. Таким образом, частота пульсаций амплитуды, называемая частотой биений, равна разности частот складываемых колебаний.
. Эта функция является периодической с частотой в два раза превышающей частоту выражения, стоящего под знаком модуля, т.е. с частотой ∆ω. Таким образом, частота пульсаций амплитуды, называемая частотой биений, равна разности частот складываемых колебаний.
1.7.10. Сложение взаимно перпендикулярных колебаний (фигуры Лиссажу)
Если материальная точка совершает колебания как вдоль оси х, так и вдоль оси у, то она будет двигаться по некоторой криволинейной траектории. Пусть частота колебаний одинакова и начальная фаза первого колебания равна нулю, тогда уравнения колебаний запишем в виде:
| х=а cos ωt, y=b cos(ωt+α), | (1.7.42) |
где α – разность фаз обоих колебаний.
Выражение (1.7.42) представляет заданное в параметрическом виде уравнение траектории, по которой движется точка, участвующая в обоих колебаниях. Если исключить из уравнений (1.7.42) параметр t, то получим уравнение траектории в обычном виде:
 | (1.7.43) |
Уравнение (1.7.43) представляет собой уравнение эллипса, оси которого ориентированы произвольно относительно координатных осей х и у. Ориентация эллипса и величина его полуосей зависят от амплитуд а и b и разности фаз α. Рассмотрим некоторые частные случаи:
α=mπ (m=0, ±1, ±2, …). В этом случае эллипс вырождается в отрезок прямой
 , , | (1.7.44) |
где знак плюс соответствует нулю и четным значениям m (рис 1.7.8.а), а знак минус – нечетным значениям m (рис.1.7.8.б). Результирующее колебание является гармоническим с частотой ω, амплитудой  , совершающимся вдоль прямой (1.7.44), составляющей с осью х угол
, совершающимся вдоль прямой (1.7.44), составляющей с осью х угол 
 (рис.1.7.11).
(рис.1.7.11).
 |
| Рис.1.7.11.а |
 |
| Рис.1.7.11. б |

(m=0, ±1, ±2, …). В этом случае уравнение имеет вид

Это уравнение эллипса, оси которого совпадают с осями координат, а его полуоси равны амплитудам (рис. 1.7.12). Если амплитуды равны, то эллипс становится окружностью.
 |
| Рис.1.7.12 |
Если частоты взаимно перпендикулярных колебаний отличаются на малую величину ∆ω, их можно рассматривать как колебания одинаковой частоты, но с медленно изменяющейся разностью фаз. В этом случае уравнения колебаний можно записать
x=a cos ωt, y=b cos[ωt+(∆ωt+α)]
и выражение ∆ωt+α рассматривать как разность фаз, медленно изменяющуюся со временем по линейному закону. Результирующее движение в этом случае происходит по медленно изменяющейся кривой, которая будет последовательно принимать форму, отвечающую всем значениям разности фаз от -π до+π.
Если частоты взаимно перпендикулярных колебаний не одинаковы, то траектория результирующего движения имеет вид довольно сложных кривых, называемых фигурами Лиссажу . Пусть, например, частоты складываемых колебаний относятся как 1 : 2 и разность фаз π/2. Тогда уравнения колебаний имеют вид
x=a cos ωt, y=b cos[2ωt+π/2].
За то время, пока вдоль оси х точка успевает переместиться из одного крайнего положения в другое, вдоль оси у, выйдя из нулевого положения, она успевает достигнуть одного крайнего положения, затем другого и вернуться. Вид кривой показан на рис. 1.7.13. Кривая при таком же соотношении частот, но разности фаз равной нулю показана на рис.1.7.14. Отношение частот складываемых колебаний обратно отношению числа точек пересечения фигур Лиссажу с прямыми, параллельными осям координат. Следовательно, по виду фигур Лиссажу можно определить соотношение частот складываемых колебаний или неизвестную частоту. Если одна из частот известна.
 |
| Рис.1.7.13 |
 |
| Рис.1.7.14 |
Чем ближе к единице рациональная дробь, выражающая отношение частот колебаний, тем сложнее получающиеся фигуры Лиссажу.
1.7.11. Распространение волн в упругой среде
Если в каком-либо месте упругой (твёрдой жидкой или газообразной) среды возбудить колебания её частиц, то вследствие взаимодействия между частицами это колебание будет распространяться в среде от частицы к частице с некоторой скоростью υ. процесс распространения колебаний в пространстве называется волной .
Частицы среды, в которой распространяется волна, не вовлекаются волной в поступательное движение, они лишь совершают колебания около своих положений равновесия.
В зависимости от направлений колебаний частиц по отношению к направлению, в котором распространяется волна, различают продольные и поперечные волны. В продольной волне частицы среды колеблются вдоль распространения волны. В поперечной волне частицы среды колеблются в направлениях, перпендикулярных к направлению распространения волн. Упругие поперечные волны могут возникнуть лишь в среде, обладающей сопротивлением сдвигу. Поэтому в жидкой и газообразной средах возможно возникновения только продольных волн. В твёрдой среде возможно возникновение как продольных, так и поперечных волн.
На рис. 1.7.12 показано движение частиц при распространении в среде поперечной волны. Номерами 1,2 и т. д. обозначены частицы отстающие друг от друга на расстояние, равное (¼ υT), т.е. на расстояние, проходимое волной за четверть периода колебаний, совершаемых частицами. В момент, времени принятый за нулевой, волна, распространяясь вдоль оси слева направо, достигла частицы 1, вследствие чего частица начала смещаться из положения равновесия вверх, увлекая за собой следующие частицы. Спустя четверть периода частица 1 достигает крайнего верхнего положения равновесия частица 2. По пришествие ещё четверти периода первая часть будет проходить положение равновесия, двигаясь в направлении сверху вниз, вторая частица достигнет крайнего верхнего положения, а третья частица начнёт смещаться вверх из положения равновесия. В момент времени равный T, первая частица закончит полный цикл колебания и будет находиться в таком же состоянии движения, как чальный момент. Волна к моменту времени T, пройдя путь (υT), достигнет частицы 5.
На Рис. 1.7.13 показано движение частиц при распространении в среде продольной волны. Все рассуждения, касающиеся поведения частиц в поперечной волне, могут быть отнесены и к данному случаю с заменой смещений вверх и вниз смещениями вправо и влево.
Из рисунка видно, что при распространении продольной волны в среде создаются чередующиеся сгущения и разряжения частиц (места сгущения обведены на рисунке пунктиром), перемещающиеся в направлении распространения волны со скоростью υ.
 |
| Рис. 1.7.15 |
 |
| Рис. 1.7.16 |
На рис. 1.7.15 и 1.7.16 показаны колебания частиц, положения, равновесия которых лежат на оси x. В действительности колеблются не только частицы, расположенные вдоль оси x, а совокупность частиц, заключённых в некотором объёме. Распространяясь от источников колебаний, волновой процесс охватывает всё новые и новые части пространства, геометрическое место точек, до которых доходят колебания к моменту времени t, называется фронтом волны (или волновым фронтом). Фронт волны представляет собой ту поверхность, которая отделяет часть пространства, уже вовлеченную в волновой процесс, от области, в которой колебания ещё не возникли.
Геометрическое место точек, колеблющихся в одинаковой фазе, называется волновой поверхностью . Волновую поверхность можно провести через любую точку пространства, охваченного волновым процессом. Следовательно, волновых поверхностей существует бесконечное множество, в то время как волновой фронт каждый момент времени только один. Волновые поверхности остаются не подвижными (они проходят через положения равновесия частиц, колеблющихся в одной фазе ). Волновой фронт всё время перемещается.
Волновые поверхности могут быть любой формы. В простейших случаях они имеют форму плоскости или сферы. Соответственно волна в этих случаях называется плоской или сферической. В плоской волне волновые поверхности представляют собой множество параллельных друг другу плоскостей, в сферической волне – множество концентрических сфер.
 |
| Рис. 1.7.17 |
Пусть плоская волна распространяется вдоль оси x . Тогда все точки сферы, положения, равновесия которых имеет одинаковую координату x (но различие значения координат y и z), колеблются в одинаковой фазе.
На Рис. 1.7.17 изображена кривая, которая даёт смещение ξ из положения равновесия точек с различными x в некоторый момент времени. Не следует воспринимать этот рисунок как зримое изображение волны. На рисунке показан график функций ξ ( x, t) для некоторого фиксированного момента времени t. Такой график можно строить как для продольной так и для поперечной волны.
Расстояние λ, на короткое распространяется волна за время, равное периоду колебаний частиц среды, называется длиной волны . Очевидно, что
| λ=υT | (1.7.45 ) |
где υ – скорость волны, T – период колебаний. Длину волны можно определить также как расстояние между ближайшими точками среды, колеблющимися с разностью фаз, равной 2π (см. рис. 1.7.14)
Заменив в соотношении(1.7.45) T через 1/ν (ν – частота колебаний), получим
| λν=υ . | (1.7.46) |
К этой формуле можно придти также из следующих соображений. За одну секунду источник волн совершает ν колебаний, порождая в среде при каждом колебании один «гребень» и одну «впадину» волны. К тому моменту, когда источник будет завершать ν — е колебание, первый «гребень» успеет пройти путь υ. Следовательно, ν «гребней» и «впадин» волны должны уложиться в длине υ.
1.7.12. Уравнение плоской волны
Уравнением волны называется выражение, которое дает смещение колеблющейся частицы как функцию ее координат x, y, z и времени t :
(имеются в виду координаты равновесного положения частицы). Эта функция должна быть периодической относительно времени t , и относительно координат x, y, z. . Периодичность по времени вытекает из того, что точки, отстоящие друг от друга на расстоянии λ , колеблются одинаковым образом.
Найдем вид функции ξ в случае плоской волны, предполагая, что колебания носят гармонический характер. Для упрощения направим оси координат так, чтобы ось x совпадала с направлением распространения волны. Тогда волновые поверхности будут перпендикулярными к оси x и, поскольку все точки волновой поверхности колеблются одинаково, смещение ξ будет зависеть только от x и t :
 |
| Рис.1.7.18 |
Пусть колебания точек, лежащих в плоскости x = 0 (рис. 1.7.18), имеют вид

Найдем вид колебания точек в плоскости, соответствующей произвольному значению x . Для того, чтобы пройти путь от плоскости x =0 до этой плоскости, волне требуется время  ( υ – cкорость распространения волны). Следовательно, колебания частиц, лежащих в плоскости x , будут отставать по времени на τ от колебаний частиц в плоскости x = 0 , т.е. будут иметь вид
( υ – cкорость распространения волны). Следовательно, колебания частиц, лежащих в плоскости x , будут отставать по времени на τ от колебаний частиц в плоскости x = 0 , т.е. будут иметь вид

Итак, уравнение плоской волны (продольной, и поперечной), распространяющейся в направлении оси x , выглядит следующим образом:
 | (1.7.47) |
Величина а представляет собой амплитуду волны. Начальная фаза волны α определяется выбором начала отсчета x и t . При рассмотрении одной волны начало отсчета времени и координаты обычно выбирают так, чтобы α была равной нулю. При совместном рассмотрении нескольких волн сделать так, чтобы для всех них начальные фазы равнялись нулю, как правило, не удается.
Зафиксируем какое – либо значение фазы, стоящей в уравнении (1.7.47), положив
 | (1.7.48) |
Это выражение определяет связь между временем t и тем местом x , в котором фаза имеет зафиксированное значение. Вытекающее из него значение dx/dt дает скорость, с которой перемещается данное значение фазы. Продифференцировав выражение (1.7.48), получим

 . . | (1.7.49) |
Таким образом, скорость распространения волны υ уравнении (1.7.47) есть скорость перемещения фазы, в связи с чем, ее называют фазовой скоростью.
Согласно (1.7.49) dx/dt> 0, следовательно, уравнение (1.7.47) описывает волну, распространяющуюся в сторону возрастания x .
Волна, распространяющаяся в противоположном направлении, описывается уравнением
 | (1.7.50) |
Действительно, приравняв константе фазу волны (1.7.50) и продифференцировав получившееся равенство, придем к соотношению
 ,
,
из которого следует, что волна (1.7.50) распространяется в сторону убывания x .
Уравнению плоской волны можно придать симметричный относительно x и t вид. Для этого введем величину
 , , | (1.7.51) |
которая называется волновым числом. Умножив числитель и знаменатель последнего выражения на частоту ν, и вспомнив, что  , можно представить волновое число в виде
, можно представить волновое число в виде
 . . | (1.7.52) |
Раскрыв в уравнении волны
круглые скобки и используя волновое число, придем к следующему уравнению плоской волны, распространяющейся вдоль оси :
 | (1.7.53) |
Уравнение волны, распространяющейся в сторону убывания x :

При выводе формулы (1.7.53) мы предполагали, что амплитуда колебаний не зависит от x . Для плоской волны это наблюдается в том случае, когда энергия волны не поглощается средой. При распространении в поглощающей энергию среде интенсивность волны с удалением от источника колебаний постепенно уменьшается – наблюдается затухание волны. Опыт показывает, что в однородной среде такое затухание происходит по экспоненциальному закону:
Соответственно уравнение плоской волны, с учетом затухания , имеет следующий вид:
 | (1.7.54) |
(a 0 – амплитуда в точках плоскости x = 0).
© ФГОУ ВПО Красноярский государственный аграрный университет, 2013
Гармонические колебания в физике — формулы и определение с примерами
Содержание:
Гармонические колебания:
Некоторые движения, встречающиеся в быту, за равные промежутки времени повторяются. Такое движение называется периодическим движением. Часто встречается движение, при котором тело перемещается то в одну, то в другую сторону относительно равновесного состояния. Такое движение тела называется колебательным движением или просто колебанием.
Колебания, совершаемые телом, которое выведено из равновесного состояния в результате действия внутренних сил, называются собственными (свободными) колебаниями. Величина удаления от равновесного состояния колеблющегося тела называется его смещением (
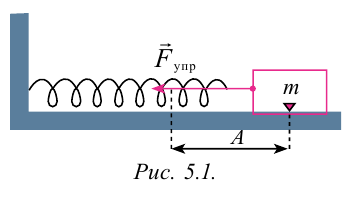
Для наблюдения механических колебаний ознакомимся с колебаниями груза, закрепленного на конце пружины (рис. 5.1). На этом рисунке груз, закрепленный на пружине, сможет двигаться без трения с горизонтальным стержнем, так как силу тяжести шарика приводит в равновесие реакционная сила стержня.
Коэффициент упругости пружины –  , а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
, а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
Если груз, который находится в равновесии, потянем вправо на расстояние  и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
сторону равновесного состояния.

С течением времени смещение груза уменьшается относительно  , но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение (
, но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение ( ) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
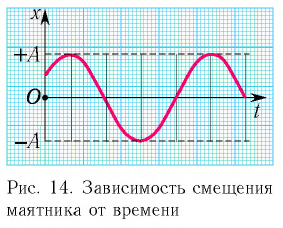
Для определения закономерности изменения в течение времени системы, которая периодически совершает колебания, заполним воронку песком, подвесим на веревке, подложим бумагу под систему и раскачаем воронку. В ходе колебания начинаем равномерно вытягивать бумагу из-под системы. В результате мы увидим, что следы песка на бумаге образуют синусоиду. Из этого можно сделать следующий вывод: смещение периодически колеблющегося тела по истечении времени изменяется по закону синусов и косинусов. При этом самое большое значение смещения равняется амплитуде ():

здесь:  – циклическая частота, зависящая от параметров колеблющихся систем,
– циклическая частота, зависящая от параметров колеблющихся систем,  – начальная фаза, (
– начальная фаза, ( ) фаза колебания с течением времени
) фаза колебания с течением времени  .
.
Из математики известно, что  поэтому формулу (5.2.) можно записать в виде
поэтому формулу (5.2.) можно записать в виде

Колебания, в которых с течением времени параметры меняются по закону синуса или косинуса, называются гармоническими колебаниями.
Значит, пружинный маятник, вышедший из равновесного состояния, совершает гармоническое колебание. Для того чтобы система совершала гармоническое колебание: 1) при выходе тела из равновесного состояния, для возвращения его в равновесное состояние должна появиться внутренняя сила; 2) колеблющееся тело должно обладать инертностью и на него не должны оказывать воздействие силы трения и сопротивления. Эти условия называется условиями проявления колебательных движений.
Основные параметры гармонических колебаний
a) период колебания  – время одного полного колебания:
– время одного полного колебания:
 )
)
б) частота колебания  – количество колебаний, совершаемых за 1 секунду:
– количество колебаний, совершаемых за 1 секунду:

Единица 
c) циклическая частота  – количество колебаний за
– количество колебаний за  секунд:
секунд:

С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.

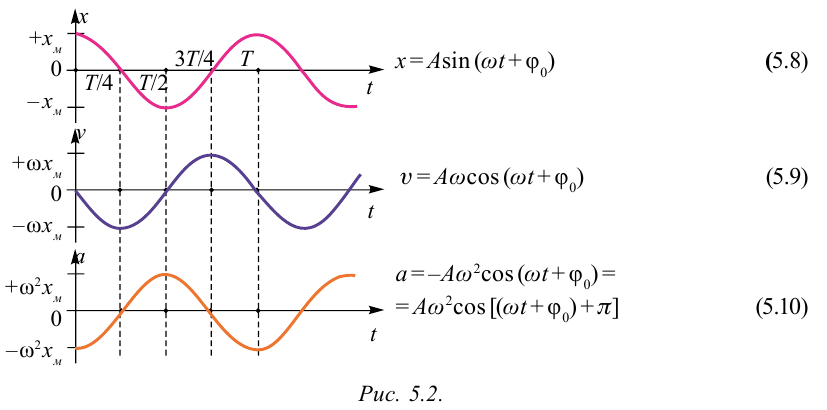
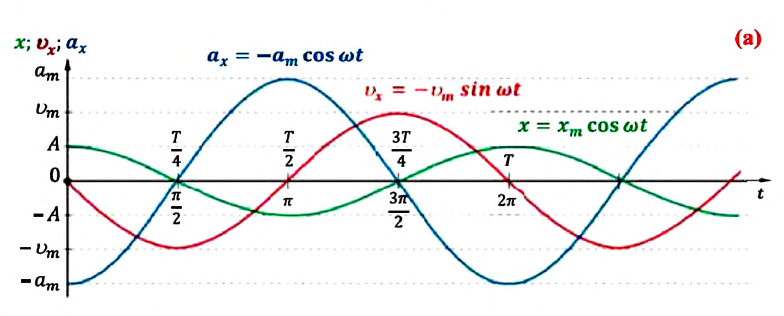
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются.
Это подтверждается следующими графиками и уравнениями:
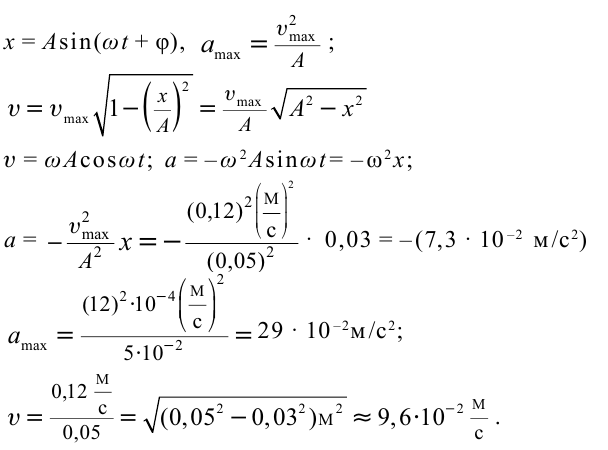
Пример решения задачи:
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.

Формула и решение:
Гармонические колебания пружинного маятника
В 1985 году в городе Мехико произошла ужасная катастрофа, причина которой было землетрясение: 5526 человек погибли, 40 ООО человек ранены, 31000 человек остались без крова. Из проведенных затем исследований ученые выяснили, что главной причиной разрушений во время землетрясения является совпадение частоты свободных колебаний зданий с частотой вынужденных колебаний Земли. Поэтому при возведении новых зданий в сейсмически активной зоне необходимо, чтобы эти частоты не совпадали. Это даст возможность уменьшить последствия землетрясения. С этой целью важно знать, от чего зависят частота и период колебаний.
Одной из простейших колебательных систем, совершающих гармонические колебания, является пружинный маятник.
Пружинный маятник — это колебательная система, состоящая из пружины и закрепленного на ней тела. Колебания, возникающие в пружинном маятнике, являются гармоническими колебаниями:
Под гармоническими колебаниями подразумеваются колебания, возникающие под действием силы, прямо пропорциональной перемещению и направленной против направления перемещения.
Исследование колебаний пружинного маятника имеет большое практическое значение, например, при вычислении колебаний рессор автомобиля при езде; в исследовании воздействия колебаний на фундамент зданий и тяжелых станков, в определении эластичности ушных перепонок при диагностике лор-заболеваний. По этой причине изучение колебаний пружинного маятника является актуальной проблемой.
С целью уменьшения количества сил, действующих на колебательную систему, целесообразно использовать горизонтально расположенную колебательную систему пружина-шарик (d).
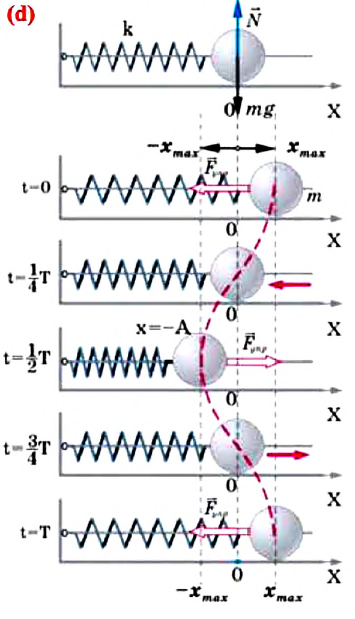
В этой системе действия силы тяжести и реакции опоры уравновешивают друг друга. При выведении шарика из состоянии равновесия, например, при растяжении пружины до положения  сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:
сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:

Формула (4.9) является уравнением свободных гармонических колебаний пружинного маятника.
Где  — масса шарика, закрепленного на пружине,
— масса шарика, закрепленного на пружине,  — проекция ускорения шарика вдоль оси
— проекция ускорения шарика вдоль оси  — жесткость пружины,
— жесткость пружины,  -удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение
-удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение  — постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение
— постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение  соответствует квадрату циклической частоты
соответствует квадрату циклической частоты 
Таким образом, уравнение движения пружинного маятника можно записать и так:

Уравнение (4.12) показывает, что колебания пружинного маятника с циклической частотой  являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:
являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:

Так как тригонометрическая функция является гармонической функцией, то и колебания пружинного маятника являются гармоническими колебаниями.
Здесь  фаза колебания,
фаза колебания,  — начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:
— начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:  Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы
Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы  В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
 или
или 
Из сравнения выражений (4.11) и (4.5) определяются величины, от которых зависят период и частота колебаний пружинного маятника:
Из выражений (4.14) и (4.15) видно, что период и частота пружинного маятника зависят от жесткости пружины и массы груза, подвешенного к нему.
Гармонические колебания математического маятника
До наших дней дошла такая историческая информация: однажды в 1583 году итальянский ученый Г. Галилей, находясь в храме города Пиза, обратил внимание на колебательное движение люстры, подвешенной на длинном тросе. Он, сравнивая колебания люстры со своим пульсом, определил, что, несмотря на уменьшение амплитуды колебания, время, затрачиваемое на одно полное колебание (период колебания) люстры, не изменяется. Затем Галилей в результате многочисленных проведенных исследований, изменяя длину нитевого маятника, массу подвешенного к нему груза, высоту расположения маятника (по сравнению с уровнем моря), определил, от чего зависят период и частота колебаний маятника.
Гармонические колебания возникают также под действием силы тяжести. Это можно наблюдать с помощью математического маятника.
Математический маятник — это идеализированная колебательная система, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити.
Для исследования колебаний математического маятника можно использовать систему, состоящую из тонкой длинной нити и шарика (b).
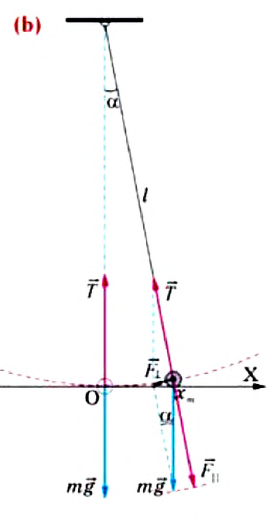
Сила тяжести  действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити
действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити  Однако, если вывести маятник из состояния равновесия, сместив его на малый угол
Однако, если вывести маятник из состояния равновесия, сместив его на малый угол  в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити
в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити  и перпендикулярная нити
и перпендикулярная нити  Сила натяжения
Сила натяжения  и составляющая силы тяжести
и составляющая силы тяжести  уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей
уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей  «пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой
«пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой  в проекциях на ось ОХ:
в проекциях на ось ОХ:
Приняв во внимание, что:

Для уравнения движения математического маятника получим:

Где  — длина математического маятника (нити),
— длина математического маятника (нити),  — ускорение свободного падения,
— ускорение свободного падения,  — амплитуда колебания.
— амплитуда колебания.
Для данной колебательной системы отношение  — постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты
— постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты 


Таким образом, уравнение движения математического маятника можно записать и так:

Уравнение (4.19) показывает, что колебания математического маятника являются гармоническими колебаниями с циклической частотой со. Из математики вы знаете, что решением этого уравнения является нижеприведенная функция:

Так как эта функция является гармонической, то и колебания математического маятника являются гармоническими колебаниями.
Отсюда определяются величины, от которых зависят период и частота колебаний математического маятника:
Таким образом, период и частота колебаний математического маятника зависят от длины маятника и напряженности гравитационного поля в данной точке.
Скорость и ускорение при гармонических колебаниях
Вы уже знакомы с основными тригонометрическими функциями и умеете строить графики тригонометрических уравнений, описывающих гармонические колебания.
При гармонических колебаниях маятника его смещение изменяется по гармоническому закону, поэтому не трудно доказать, что его скорость и ускорение также изменяются по гармоническому закону. Предположим, что смещение изменяется по закону косинуса и начальная фаза равна нулю

Так как скорость является первой производной смещения (координат) по времени, то:


Как видно из выражения (4.23), скорость, изменяющаяся по гармоническому закону, опережает колебания смещения по фазе на  (а).
(а).
Максимальное (амплитудное) значение скорости зависит от амплитуды, частоты и периода колебаний:

Так как ускорение является первой производной скорости по времени, то получим:


Как видим, колебания ускорения, изменяющегося по гармоническому закону, опережают колебания скорости по фазе на  а колебания смещения на
а колебания смещения на
 (см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:
(см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:

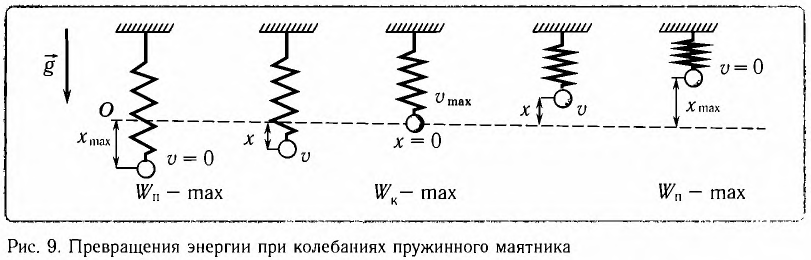
Превращения энергии при гармонических колебаниях
Теоретический материал
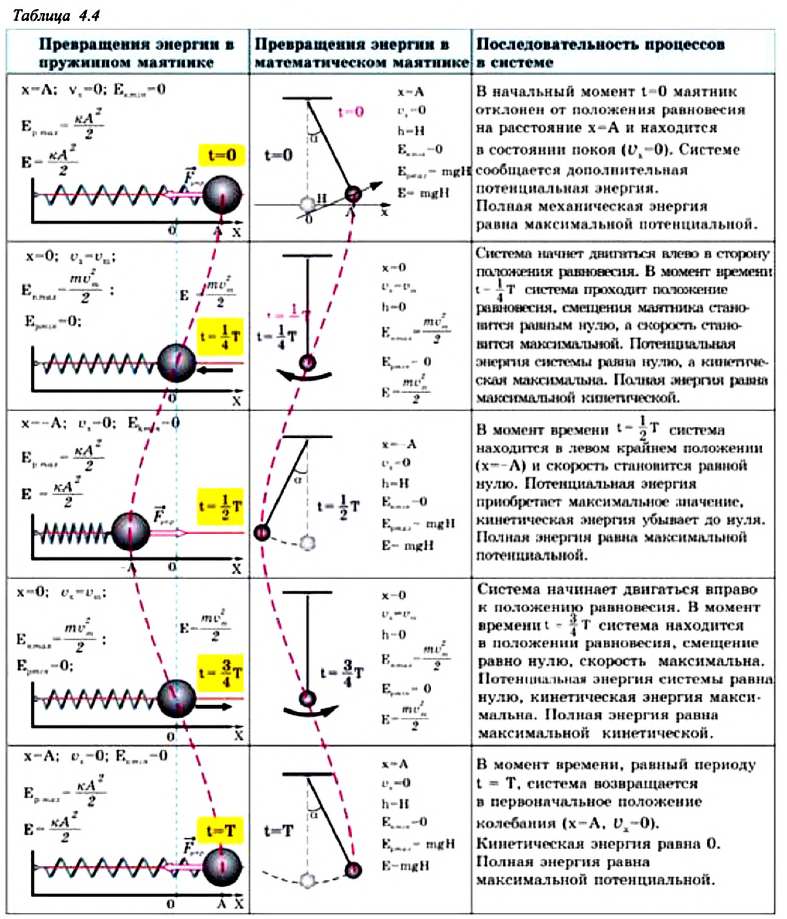
Потенциальная и кинетическая энергия свободных гармонических колебаний в замкнутой системе периодически превращаются друг в друга.
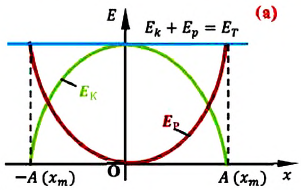
В таблице 4.4 дано сравнение превращений энергий в пружинном и математическом маятниках. Как видно из таблицы, потенциальная энергия колебательной системы в точке возвращения  имеет максимальное значение:
имеет максимальное значение:
Если же маятник находится в точке равновесия, потенциальная энергия минимальна:

Кинетическая энергия системы, наоборот, в точке возвращения минимальна  а в точке равновесия максимальна:
а в точке равновесия максимальна:
На рисунке (а) даны графики зависимости потенциальной и кинетической энергии при гармоническом колебательном движении от смещения.
Полная механическая энергия замкнутой колебательной системы в произвольный момент времени  остается постоянной (трение не учитывается):
остается постоянной (трение не учитывается):
a) для пружинного маятника:
b) для математического маятника:
Если принять во внимание изменение смещения и скорости по гармоническому закону в формулах потенциальной и кинетической энергии колебательного движения, то станет очевидно, что при гармонических колебаниях эти энергии так же изменяются по гармоническому закону (b):

Как было отмечено выше, полная энергия системы не изменяется по гармоническому закону:

• Полная энергия гармонических колебаний прямо пропорциональна квадрату амплитуды колебаний.
Если же в системе существует сила трения, то его полная энергия не сохраняется — изменение полной механической энергии равно работе силы трения. В результате колебания затухают: 
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
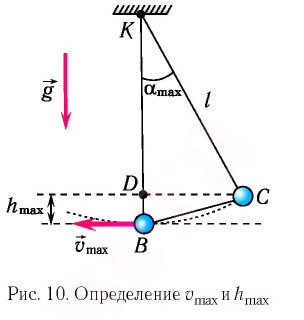
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
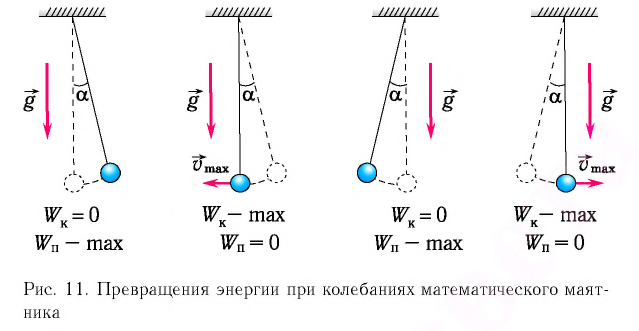
При отклонении маятника на угол а (рис. 7), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

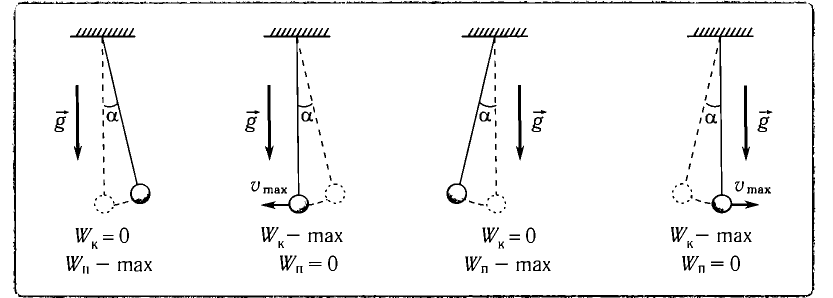
Рис. 7. Превращения энергии при колебаниях математического маятника
Поскольку при прохождении положения равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:
Из закона сохранения механической энергии следует (рис. 8), что
 (1)
(1)
Отсюда найдем модуль максимальной скорости маятника:
 (2)
(2)
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
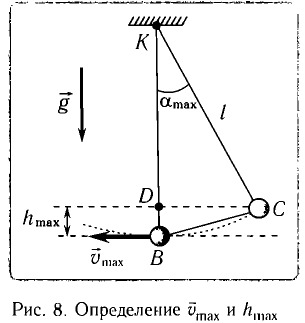
Если колебания малые, то  Из треугольника KCD на рисунке 8 находим
Из треугольника KCD на рисунке 8 находим


Подставив выражение для в формулу I (2), получим
Подставляя выражения для  и в соотношение (1), находим
и в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 9). В крайних точках, когда координата груза принимает значение  , модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда x = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В промежуточных точках полная механическая энергия

Отсюда можно вывести выражение для модуля скорости  груза в точке с
груза в точке с
Так как 
Энергия при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  то из закона сохранения механической энергии следует (см. рис. 10), что
то из закона сохранения механической энергии следует (см. рис. 10), что  т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:
Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  Из
Из  (см. рис. 10) находим:
(см. рис. 10) находим: 
или 
Подставив выражение (3) для  в формулу (2), получим:
в формулу (2), получим: 
Подставляя выражения (3) для  и (4) для
и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11). В любом промежуточном положении 
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
В крайних положениях, когда  модуль скорости маятника
модуль скорости маятника  и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  вся энергия пружинного маятника переходит в кинетическую энергию груза:
вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  а также для
а также для  находим его потенциальную энергию
находим его потенциальную энергию 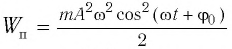 и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени
Тогда полная механическая энергия пружинного маятника в этот же. момент времени есть величина постоянная и равная:
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
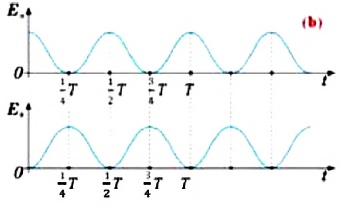
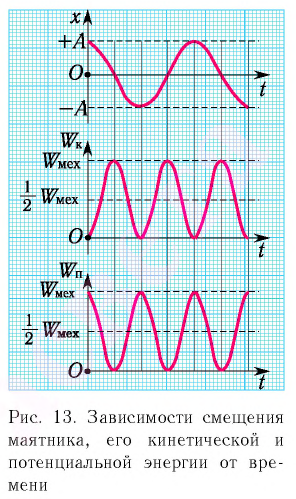
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
Пример №1
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  см и при прохождении положения равновесия достигает скорости, модуль которой
см и при прохождении положения равновесия достигает скорости, модуль которой  Определите период
Определите период  колебании маятника.
колебании маятника.
Дано:

Решение
По закону сохранения механической энергии


Ответ: 
Пример №2
Груз массой  г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  Его смешают на расстояние
Его смешают на расстояние  см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  Определите потенциальную
Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.

Решение Потенциальная энергия груза: 
Кинетическая энергия груза: 
Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда 
Циклическая частота: 
В начальный момент времени  координата груза
координата груза  Отсюда начальная фаза:
Отсюда начальная фаза: 
Тогда закон гармонических колебаний имеет вид (рис. 14):

Ответ: 

| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Вынужденные электромагнитные колебания
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
- Механические колебания и волны в физике
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Гармонические колебания пружинного маятника
Вы будете перенаправлены на Автор24
Рассмотрим систему, которая состоит из:
- упругой спиральной пружины,
- очень небольшого тела массы $m$.
Один конец пружины закреплен, к другому концу прикреплено тело $m$ рис.1.
Рисунок 1. Пружинный маятник. Автор24 — интернет-биржа студенческих работ
Длина пружины без деформации равна $l_0$. При растяжении или сжатии этой пружины до длины $l$ возникает сила упругости ($\vec F$), которая хочет вернуть пружине первоначальную длину. Если изменения длины пружины мало и равно:
то выполняется закон Гука, в соответствии с которым сила упругости прямо пропорциональна изменению длины пружины:
где $k$ — коэффициент упругости пружины.
Уравнение колебаний пружинного маятника
В таком случае уравнение движения тела, которое присоединено к концу пружины можно записать так:
$m\omega^2=k$, тогда дифференциальное уравнение (3) можно переписать в виде:
$y=y_m\cos (\omega t+\delta) (5),$
где $y_m$ — амплитуда колебаний (максимальное смещение груза от положения равновесия), является решением уравнения (4) при любых постоянных значениях $y_m$ и $\delta$.
Частота и период колебаний пружинного маятника
Груз на пружине выполняет гармонические колебания:
круговая (циклическая) частота которых равна:
период колебаний составляет:
частота колебаний его:
Мы видим в (7), что период колебаний пружинного маятника не зависит от амплитуды. Данное свойство колебаний называют изохронностью. Колебания пружинного маятника являются изохронными, пока выполняется закон Гука. Если растяжения становятся большими, то закон Гука будет нарушаться, тогда возникает зависимость периода колебаний от амплитуды.
Готовые работы на аналогичную тему
Амплитуда и начальная фаза колебаний пружинного маятника
Амплитуду колебаний ($y_m$) и начальную фазу ($\delta$) невозможно определить из дифференциального уравнения (4). Данные неизменные параметры колебаний определяют исходя из начальных условий колебаний. Например, задают:
- смещение $y$ в момент времени принимаемы за $t=0$;
- и начальную скорость ($\dot
$) в этот же момент времени.
Дифференциальное уравнение (4) справедливо при любых начальных условиях. Поскольку это уравнение может описывать любые колебания, которые способна совершать наша колебательная система. Конкретное колебание выделяют из этого комплекса при определении постоянных $y_m$ и $\delta$.
Энергия колебаний пружинного маятника
Потенциальная энергия тела, подвешенного на пружине, задается выражением:
Принимая во внимание гармонический закон изменения $y$ (5), получим, что потенциальная энергия изменяется во времени:
$U(t)=\frac
Кинетическую энергию определяют как:
Скорость движения тела на пружине вдоль оси $Y$ найдем как первую производную от $y(t)$ по времени:
$v=v_y=\dot
Закон изменения кинетической энергии в зависимости от времени с учетом (12) запишем как:
$E_k=m y_m^2\omega^2\sin^2 (\omega t+\delta) (13),$
где учитывая формулу (6), окончательно получим:
$E_k=k y_m^2\sin^2 (\omega t+\delta)=\frac<1><4>k y_m^2(1-\cos 2(\omega t+\delta)) (14).$
Формулы (10) и (14) показывают, что кинетическая и потенциальная энергии колеблющегося пружинного маятника изменяются во времени. Они сами выполняют гармонические колебания около средней величины, равной $\frac<1> <4>k y_m^2$ с удвоенной циклической частотой $2\omega$.
В тот момент времени, когда кинетическая энергия максимальна, потенциальная энергия равна нулю и наоборот. При этом полная механическая энергия, равная сумме кинетической и потенциальной энергии не изменяется:
При этом полная энергия колебаний пружинного маятника, если учесть выражения (10) и (14), равна:
Выражение (5) является решением дифференциального уравнения (15), если круговая частота колебаний определятся при помощи выражения (6), амплитуда – формулой (16). Так, если задана полная механическая энергия $E$, то амплитуда колебаний ($y_m$) не является произвольной величиной. При этом произвол имеется только в определении начальной фазы колебаний $\delta$, которую определяют начальные условия. Чтобы определить $\delta$ достаточно одного начального условия:
- либо нужно иметь начальное смещение;
- либо начальную скорость.
Наличие в решении единственной произвольной константы связывают с тем, что уравнение (15) является дифференциальным уравнением первого порядка по времени.
Заметим, что энергию в уравнении (15) можно рассматривать как параметр, принимающий любые значения большие нуля, которые определяют начальные условия колебаний. В этом случае уравнение (15) считают эквивалентным уравнению (4).
На основе закона сохранения энергии (15) сделаем следующие выводы:
Наибольшая кинетическая энергия пружинного маятника равна его наибольшей энергии потенциальной энергии.
Данный вывод очевиден, так как потенциальная энергия маячтника максимальна при смещении точки выполняющей колебания на максимально возможное расстояние, при этом скорость, а соответственно и кинетическая энергия осциллятора равна нулю.
Наибольшую кинетическую энергию колебательная система имеет тогда, когда она проходит положение равновесия ($x=0$), то есть потенциальная энергия равна нулю.
где $V$ — максимальная скорость.
Средняя кинетическая энергия пружинного маятника ($E_
Сравнивая (18) и (19) мы видим, что:
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 22 05 2021
http://www.evkova.org/garmonicheskie-kolebaniya-v-fizike
http://spravochnick.ru/fizika/garmonicheskie_kolebaniya/garmonicheskie_kolebaniya_pruzhinnogo_mayatnika/