Дискретизация дифференциальных уравнений
В частных производных
Решением дифференциального уравнения называется функция непрерывного аргумента, обращающая это уравнение в тождество при заданных граничных и начальных условиях. При численном решении исходное дифференциальное уравнение (вместе с граничными и начальными условиями) заменяется эквивалентной системой алгебраических уравнений, а численным решением называется сеточная функция, обращающая указанную систему алгебраических уравнений в тождество.
Процесс замены дифференциального уравнения системой алгебраических уравнений называется дискретизацией, а сама алгебраическая система – дискретным аналогом дифференциального уравнения. Цель наших дальнейших действий заключается в изучении широко распространенных способов получения (построения) дискретных аналогов дифференциальных уравнений в частных производных.
4.1 Метод конечных разностей
Введенное в предыдущем параграфе определение сеточной функции естественным образом распространяется на случай двух и более аргументов. Простейшую двумерную сетку
xi-1, j
где Т – температура (подлежащая определению в результате решения), t – время, α – коэффициент теплопроводности, х – координата. С точки зрения физики, уравнение (21) описывает нестационарный процесс распространения тепла в стержне с теплоизолированной боковой поверхностью и возможностью подвода (отвода) теплоты на его торцах (рис. 6). С математической точки зрения, решением уравнения (21) является функция, зависящая от двух переменных (координата х и время t).
Рис. 6. Стержень с теплоизолированной боковой поверхностью Для решения задачи должно быть заданы: § граничное условие на левом торце стержня – либо зависимость температуры от времени T0=T(x0,t) (условие Дирихле) либо пространственная производная § граничное условие на правом конце стержня – TN=T(xN,t) либо § начальное условие – закон распределения температуры по всей длине стержня в начальный момент времени Т(х, 0), где x0 Алгебраическое уравнение (21) позволяет методом «последовательного обхода» узлов расчетной сетки найти все неизвестные значения сеточной функции Ti, j:
Как следует из рассмотрения рис. 8а, в правой части уравнения (22a) упоминаются лишь те узлы расчетной сетки, значения температуры в которых уже известны. Расчетные схемы, обладающие указанным свойством, называются явными. Данное обстоятельство, с одной стороны, существенно упрощает решение задачи об отыскании значений сеточной функции Тi, j, с другой стороны, анализ формулы (22a), показывает, что температура в узле xi в момент времени tj+1, зависит только от температуры в узлах xi-1, xi, xi+1 в момент времени tj, и не зависит от распределения температур внутри стержня в момент времени tj+1, что не вполне соответствует физическому смыслу задачи. Для устранения этого противоречия, несколько видоизменим аппроксимацию производной
Правая часть уравнения (23a) содержит неизвестные величины Ti-1,j+1 и Ti+1,j+1, поэтому оно не может быть непосредственно (без увеличения объема вычислительной работы) использовано для нахождения температуры Ti,j+1. Расчетный шаблон для неявной расчетной схемы (23a) приведен на рис. 8б. Как показывают оценки [Флетчер], объем вычислений, при применении неявной схемы вместо явной схемы (22a), возрастает, ориентировочно, в два раза. Однако лучшая физическая обоснованность неявной схемы позволяет нам рассчитывать на более высокое качество результатов расчета. В качестве примера, обсудим решение неявного уравнения (23а) методом итераций(Гаусса-Зейделя). Первый этап метода заключается в выборе начального приближения для искомых значений функции. В данном случае, хорошей идеей представляется использование в качестве начального приближения значений температуры, взятых с предыдущего временного слоя, т.е.
где верхний индекс означает номер итерации. Тогда, с учетом (23а), в первом приближении температура в момент времени tj+1 может быть определена как
Скорее всего, значения температуры, определенные в первом приближении, не будут удовлетворять исходному уравнению (23). Поэтому процесс придется продолжать до тех пор, пока для каждого узла сетки различие между результатами, полученными на очередной и предыдущей итерациях, не станет меньше некоторой наперед заданной величины (точности решения) ε, т.е. пока не будет выполнено условие:
Следует также предусмотреть прекращение расчета в том случае, если решения не удастся достигнуть (решение не сойдется) после некоторого «разумного» числа итераций К. Причиной отсутствия сходимости, в частности, могут стать завышенные требования к точности решения ε, чрезмерно большие шаги расчетной сетки Δx и Δt, неудачный выбор начального приближения, а также некоторые физические эффекты[23]. В некоторых случаях, добиться сходимости решения удается за счет использования метода релаксации. Преобразуем последнюю из формул (25) к виду:
где r – коэффициент релаксации (r>0). Очевидно, что, при r=1, формула (25а) совпадает с последней из формул (25). При значениях 0 1 (верхняя релаксация), может привести к сокращению продолжительности расчета, а может вызвать полный «развал» численной схемы. Следует подчеркнуть, что выбор метода дискретизации дифференциальных уравнений и оптимальной величины коэффициента релаксации возлагается на исследователя[25]. Дополнительные сведения по этому вопросу содержатся в главе, посвященной свойствам разностных схем. 4.2 Метод конечных элементов В основе метода конечных элементов (МКЭ) лежит предположение о характере поведения функции Очевидно, что значение кусочно-линейной функции Ф*=Ф(х*) в некоторой точке х*, лежащей внутри отрезка [xi-1, xi] может быть найдено по формуле:
Рис. 9. Кусочно-линейная интерполяция решения дифференциального уравнения
График функции формы (пробной функции)
Рис. 10. Линейная функция формы Отметим также, что производная кусочно-линейной функции Ф(х) в пределах элемента [xi-1, xi] совпадает с конечно-разностным отношением назад (9а), а в пределах элемента [xi, xi+1] – с конечно-разностным отношением вперед (9b). Продемонстрируем применение метода конечных элементов на примере рассмотренного нами ранее обыкновенного дифференциального уравнения (13). Для сокращения записи будем использовать обозначение F(x)= Подстановка в уравнение (13) вместо точного решения
где R(х) – невязка решения, в общем случае являющаяся функцией независимой переменной х. Очевидно, что кусочно-линейная функция Ф(х) будет хорошим приближением к точному решению Второй принципиальный этап МКЭ заключается в выборе способа определения неизвестных узловых значений Фi. Для решения этой задачи потребуем, чтобы взвешенные интегралы невязки по всей области задания функции
Вследствие локальности функций формы
Все интегралы, входящие в (30а), могут быть сравнительно легко определены, а сами соотношения (30а), совместно с начальным условием Ф0=
Следует обратить внимание на то, что матрица системы линейных алгебраических уравнений (30b) имеет специфическую диагональную (ленточную) структуру. Для решения систем уравнений с ленточными матрицами, в вычислительной математике разработан ряд специальных методов, позволяющих существенно уменьшить объем вычислительной работы, самый распространенный из этих методов, называется методом прогонки. Результаты решения дифференциального уравнения (13) методом конечных элементов приведены на рис. 11. Как можно видеть из этого рисунка, уже при шаге сетки Δх=0,08 численное решение, полученное с помощью МКЭ, гораздо лучше соответствует точному решению, чем численное решение, полученное с помощью метода Эйлера при шаге сетки Δх=0,025 (см. рис. 4). Следует, однако, отметить, что объем вычислительной работы, связанный с определением интегралов, входящих в (30), и последующее решение полученной системы алгебраических уравнений, на порядок превосходит объем вычислительной работы, выполненной по методу Эйлера. Метод конечных элементов естественным образом распространяется на случай функций нескольких переменных. При этом, как правило, оказывается удобнее задавать каждую из функций формы в локальной системе координат, связанной с рассматриваемым узлом расчетной сетки. В качестве примера, на рис. 12 приведен график полилинейной функции формы
Рис. 11. Решение дифференциального уравнения (13) методом конечных элементов
Рис. 12. Полилинейная функция формы содержащей треугольные конечные элементы 4.3 Метод конечных объемов Использование метода конечных (контрольных) объемов продемонстрируем на примере двумерного стационарного уравнения теплопроводности:
где α – коэффициент теплопроводности, S – скорость выделения теплоты в единице объема. Решение задачи начнем с построения разностной сетки и разбиения расчетной области на непересекающиеся ячейки (объемы), каждая из которых содержит лишь один узел сетки (рис. 13). Проинтегрируем уравнение (31) по объему ячейки А:
Рис. 13. Расчетная сетка, используемая для решения уравнения (31) методом конечных объемов Используя теорему о среднем можно записать
где Δх, Δу – длины граней ячейки, xW – абсцисса левой («западной») границы ячейки А, xЕ – абсцисса правой («восточной») границы, уN – ордината верхней («северной») границы, уS – ордината нижней («южной») границы, S* – средняя по ячейке скорость тепловыделения. Индекс у производных (*), в левой части (32), указывает на то, что их следует рассматривать как средние значения, определенные таким образом, чтобы правильно представить тепловые потоки на каждой из границ. С учетом данного обстоятельства, дискретный аналог (32) может быть получен без затруднений [Патанкар]. Таким образом, уравнение (32) описывает баланс тепла (закон сохранения энергии) в пределах ячейки А. При условии правильного описания тепловых потоков между ячейками, система, составленная из уравнений вида (32), примененных к каждому контрольному объему, будет верно описывать баланс тепла во всей расчетной области. В завершение параграфа следует отметить, что в частных случаях расчетные формулы, полученные описанными выше способами, могут совпадать, а наиболее существенные отличия проявляются при использовании криволинейных неортогональных расчетных сеток. Методы решения задач математической физики, описываемых дифференциальными уравнениями в частных производных
5.2. Методы решения задач математической физики, описываемых дифференциальными уравнениями в частных производных 5.2.1. Обзор методов решения задач математической физики, описываемых дифференциальными уравнениями в частных производных Дифференциальные уравнения в частных производных классифицируют либо в зависимости от их математической природы — эллиптические, параболические и т. п. — либо в зависимости от физического смысла решаемых с их помощью задач — уравнение диффузии, волновое уравнение и т. п. Приведем классификацию наиболее часто встречающихся простейших уравнений в частных производных и области их использования. Примеры задач, в которых встречается уравнение Установившееся течение жидкости. Стационарные тепловые поля. Теплопередача с внутренними источниками тепла. Распространение звуковых волн. Здесь: В настоящее время можно выделить три основных подхода к решению задач математической физики. Прежде всего это широкий спектр математических методов, известных под названием взвешенных невязок (рисунок ниже). К другому классу относят различные сеточные или конечно-разностные методы, получившие широкое распространение вследствие простоты и наглядности формулировки и, наконец, интенсивно развивающиеся в последнее время вероятностные методы. Широкому распространению некоторых модификаций этих методов способствовало прежде всего появление ЭВМ, а также достаточно степень алгоритмизации, разрешаемая структурой этих методов.
5.2.2. Метод конечных разностей для уравнений в частных производных. Также как и при решении методом конечных разностей обыкновенных дифференциальных уравнений в основе решения уравнений в частных производных тем же методом лежит конечно-разностная аппроксимация производных. В области изменения независимых переменных уравнения L(f)=0 вводится сетка с достаточно малым шагом h. Отсюда МКР, применяемый для решения двумерных задач, часто называют методом сеток. Алгебраическое (или трансцендентное) уравнение Lh(f)=0 ,определенное в узлах сетки путем замены производных их конечно-разностными соотношениями и называемое сеточным или разностным уравнением, должно обеспечивать при неограниченном измельчении сетки при h®0 для любой достаточно гладкой функции Lh(f) ® L(f). При этом величина | Lh(f) — L(f)|. называется локальной погрешностью или погрешностью аппроксимации (дискретизации). Погрешность аппроксимации легко определяется при помощи разложений в окрестности данного узла сетки достаточно гладкой функции в соответствующие ряды Тейлора. В основе решения уравнения в частных производных методом конечных разностей лежит конечно-разностная схема аппроксимации производных, которая во многом напоминает описанную ранее процедуру для обыкновенных дифференциальных уравнений. Аппроксимация осуществляется в три этапа:
Сначала в области решения вводят равномерную сетку ²узловых точек², соответствующую характеру задачи и граничным условиям. Затем решаемое уравнение в частных производных записывают в наиболее удобной системе координат и, представляя производные в конечно-разностной форме, приводят его к виду разностного уравнения. Полученное разностное уравнение используют в дальнейшем для описания функциональной связи между соседними узлами сетки. Разностное уравнение записывают для всех узлов сетки и получают в результате систему n уравнений с n неизвестными. На последнем этапе полученную систему n уравнений с n неизвестными решают одним из численных методов. На первый взгляд эта процедура, состоящая из трех этапов, может показаться простой и прямо ведущей к решению, однако это не так — широкое разнообразие типов и размеров сеток, видов уравнений, возможных конечно-разностных аппроксимаций и методов решения получаемых систем уравнений делают задачу численного решения уравнений в частных производных исключительно многогранным исследованием. Наиболее часто используются следующие виды сеток: а) прямоугольная; б) полярная; в) треугольная; г) скошенная. Запишем несколько формул, выражающих производные функции
Получим также формулу для смешанной производной:
Можно выразить и лапсиан:
Информацию о коэффициентах при значениях функции в выражениях для конечно-разностных аналогов производных удобно представлять с помощью вычислительных шаблонов, являющихся диаграммами, показывающими, какой вклад вносят узлы сетки в рассматриваемую производную. Ниже приводятся вычислительные шаблоны для наиболее часто встречающихся производных.
Аналогично
Напомним, что D 2f= Все приведенные вычислительные шаблоны имеют погрешность порядка h . Следует отметить, что можно построить и более точные (имеющие меньшую погрешность) вычислительные шаблоны, если включить в рассмотрение дополнительные узлы. В основе всех построенных до сих пор вычислительных шаблонов лежит центрально — разностная аппроксимация. Иногда, чтобы свести к минимуму распространение ошибок, пользуются левыми и правыми разностями. Вычислительными шаблонами следует пользоваться с осторожностью, так как построенное с их помощью разностное уравнение, аппроксимирующее дифференциальное уравнение в частных производных, при счете может оказаться неустойчивым. Разностная схема считается неустойчивой, если погрешность, каково бы ни было ее происхождение, с течением времени не убывает. Границы неправильной формы. Нередко приходится иметь дело с областями неправильной формы. Хотя границы таких областей нельзя точно задать с помощью какой-либо одной из указанных сеток, существуют специальные методы, с помощью которых можно так модифицировать стандартные сетки, что они позволяют описать границу сложной конфигурации. Вычислительные шаблоны для конкретного дифференциального уравнения в частных производных можно видоизменить так, чтобы учесть неправильную форму границ рассматриваемой области. Для этого, записывая производные в центрально-разностной форме, следует учесть вклад узлов, лежащих на границе области. В качестве примера рассмотрим вычислительный шаблон уравнения Лапласа в области ограниченной произвольной кривой.
Вторые частные производные для узлов, лежащих на границе области, можно записать в виде.
Сложив две производные, получим D f. После ряда преобразований найдем: Соответствующий вычислительный шаблон представлен ниже.
Применив вычислительный шаблон к каждому из n узлов сетки, получим систему n уравнений, которая может быть линейной, если исходное уравнение имеет соответствующую структуру. В этом случае придется решать систему уравнений вида:
Обычно матрица коэффициентов оказывается ²разреженной² (содержит много нулевых элементов), так как в большей части вычислительных схем используется лишь несколько соседних узлов, а не все узлы сетки. Методы решения таких уравнений делятся на прямые и итерационные. Прямые методы позволяют получить точное решение, выполнив конечное число операций. Примером прямого метода может служить правило Крамера для решения совместных линейных алгебраических уравнений. Обычно для больших систем уравнений прямые методы неэффективны, так как при их применении требуется выполнение огромного объема вычислений и очень большой объем памяти ЭВМ. Поэтому чаще всего пользуются итерационными методами. Сущность итерационных методов заключается в многократном повторении одного и того же простого алгоритма, который дает результат, постоянно приближающийся к точному решению. Итерации начинаются с задания начального приближенного решения. Затем начальные значения переменных в узлах сетки последовательно меняются, пока не достигается заданная точность решения. Быстрота сходимости итерационного метода сильно зависит от степени точности начальной аппроксимации. Поэтому интуиция инженера может оказать большое внимание на эффективность вычислительного процесса. Итерационные методы подразделяются на точечные и блочные. В первом случае алгоритм используется для модификации приближенного решения в одном узле сетки, покрывающей область. Во втором случае решение модифицируется сразу в группе узлов сетки. Наиболее часто применяемые точечные методы: Метод Якоби, метод последовательных смещений, метод последовательной верхней релаксации. Эти методы знакомы по курсу ²Численные методы и оптимизация², поэтому, здесь они рассматриваться не будут. Рассмотрим пример решения дифференциального уравнения в частных производных. Пример 3. Определить прогибы прямоугольной шарнирно-опертой пластины при распределенной нагрузке, направленной перпендикулярно плоскости пластины.
Будем рассматривать изотропную пластину постоянной жесткости. Разрешающее уравнение такой пластины имеет вид: где w = w (x, y) — функция прогибов, q =q (x, y) — поперечная распределенная нагрузка, Здесь D = — цилиндрическая жесткость Разделим пластину в каждом направлении на четыре части: Точки 1 — 9 — внутренние узловые. Используем формулы (или шаблоны):
Точка 1. + Последние два условия, записанные в конечных разностях, дают:
Таким образом, алгебраическое уравнение, соответствующее первой узловой точке, принимает вид:
и уравнение, соответствующе 2-ой узловой точке принимает вид:
Для упрощения решения положим q=q0=const, Dx=Dy=a/4, a=b, т. е. имеем квадратную пластину при равномерном давлении и сетку с квадратной клеткой. Тогда из симметрии следует w1=w3=w7=w9; w2=w4=w6=w9. Тогда разрешающая система алгебраических уравнений с учётом вида уравнений, построенных для узловых точек 1, 2 и 5 будет иметь вид: — 16w2 + 2w5 = 20w1 qa4 / 256 D -16w1 + 28w2 — 8w5 = qa4 / 256 D (5.3.22) 8w1 —32w2 + 20w5 = qa4 / 256 D Из решения этих уравнений имеем: Максимальный прогиб (в точке 5) : Точное решение: Ознакомившись с МКР, нельзя не отметить исключительную простоту и ясность его принципов. Поэтому может показаться удивительным, что после относительно короткого периода популярности и бурного развития ныне этот метод используется все реже. Назовем три главные причины вытеснения этого метода из практики. 1. Решение систем вида, аналогичному системе из трёх уравнений (5.3.22) рассмотренного примера выполняется очень быстро. Сложность кроется не в решении, а в составлении таких систем уравнений. В рассмотренных выше примерах мы, в целях упрощения, ограничивались прямоугольной областью. В большинстве практически важных задач область определения решения имеет более сложную форму (см рисунок). В этом случае точки, в которых заданы граничные условия не всегда попадают на узловые точки равномерной сетки. Об этом мы говорили раньше. Кроме того, как мы убедились, при рассмотрении конкретных задач на границе могут задаваться не только значения некоторой функции, но и ее производные, или даже их комбинации. В результате помимо однотипных аккуратных уравнений типа (5.3.21) (5.3.22) в систему вклиниваются уравнения совсем другого вида. В этом случае матрица Таким образом, первая причина первая – сложность задания граничных условий. 2. Очень часто решение дифференциального уравнения оказывается быстро меняющимся на одних участках и гладким на других. Таково, например, решение задачи о краевом эффекте. Так в топливном баке, изображенном на рисунке, в зоне стыка цилиндрической обечайки шпангоута и сферического днища возникают изгибные деформации, которые быстро затухают по мере удаления от места стыка. Для того, чтобы численное решение на участке быстрого изменения функции было достаточно точным, шаг конечно-разностной сетки должен быть очень малым. В то же время на удалении от зоны краевого эффекта в использовании такого же мелкого шага нет никакой необходимости. Возникают два варианта решения проблемы: 1) во всей области задать малый шаг и получить систему с огромным количеством неизвестных; 2) использовать переменный шаг и значительно усложнить выражения конечно-разностных аппроксимаций производных. Поэтому причина вторая – сложно обеспечить различную точность решения для различных участков области. 3.
Конечно, все эти три проблемы не являются неразрешимыми. В период примерно тридцатилетнего периода активного использования разностных методов разработаны способы решения многих задач математической физики, в том числе и механики деформируемого твёрдого тела. Дело, однако, в том, что родившийся в 1956 году метод конечных элементов (МКЭ) очень просто решает большинство из перечисленных проблем Итак, с середины 50-х годов прошлого столетия интенсивно развивающийся метод конечных элементов (МКЭ), впервые применённый для описания сплошных сред и с тех пор завоевавший известность исключительно полезного инженерного метода, стал широко применяеться в гидродинамике, аэродинамике, теории поля, при расчете сложных напряженных состояний и в других областях. Хотя метод конечных элементов применяется для решения тех же задач, что и метод конечных разностей, основаны они на разных идеях. В методе конечных разностей производится аппроксимация производных, входящих в дифференциальные уравнения. В методе конечных элементов аппроксимируется функция в объёме (площади, протяжении) конечного элемента. Для этого физическая задача заменяется кусочно-гладкой моделью, отдельные части которой рассматриваются как реальные физические тела, работающие каждый по своему (или одинаковому) закону. Т. е. работа сложной системы заменяется совместной работой элементов её образующих. Это позволяет инженеру использовать свое интуитивное понимание задачи. Метод конечных элементов значительно более сложен для понимания, чем МКР, но обладает огромными преимуществами по сравнению с МКР, главное из которых заключается в возможности построения на его основе программ широкого назначения для решения широкого круга задач математической физики. Поэтому его рассмотрению в дальнейшем будет уделено самое пристальное внимание, а настоящий раздел завершим примерными рекомендациями по решению дифференциальных уравнений в частных производных. 5.3.2. Общие рекомендации по решению дифференциальных уравнений в частных производных. Поскольку каждому уравнению в частных производных присущи свои особенности, а граничные условия делают каждую задачу непохожей на другие, то практически невозможно сформулировать общие рекомендации, которые были бы полезны при решении таких уравнений. Однако во всех случаях полезно иметь в виду следующие правила: 1. Сначала следует выяснить, какова должна быть точность искомого решения. Если она высока, то для решения данного дифференциального уравнения может потребоваться весьма мелкая сетка или разбиение тела на очень малые элементы. 2. Затем надо внимательно изучить форму области, в которой отыскивается решение. Учесть симметрию и т. д. 3. Следует тщательно выбирать начальные значения переменных. При использовании итерационных методов скорость сходимости прямо зависит от близости исходных данных к решению. Если хорошее исходное приближение задать не удается, то может оказаться полезным разделить решение задачи на два и более этапов. На первом этапе с помощью весьма грубой сетки или разбиения на очень крупные элементы получают хорошее исходное приближение, а затем уже ищут точное решение на гораздо более мелкой сетке или разбивая тело на мелкие элементы. 4. Следует выбрать метод, более всего подходящий для решения данной задачи. Дифференциальные уравнения в частных производных с примерами решения и образцами выполненияДифференциальным уравнением с частными производными называется уравнение вида
связывающее независимые переменные x1, х2, … , хn искомую функцию и = и(х1, х2,…, хn) и ее частные производные (наличие хотя бы одной производной обязательно). Здесь ki,k2,… ,кn — неотрицательные целые числа, такие, что к1 + к2 + … + кп = т. Порядком дифференциального уравнения называется наивысший порядок входящие в уравнение частных производных. Так, если х, у — независимые переменные, и = и(х, у) — искомая функция, то
— дифференциальное уравнение 1-го порядка;
— дифференциальные уравнения 2-го порядка. Для упрощения записи пользуются также следующими обозначениями:
Пусть имеем дифференциальное уравнение с частными производными (1) порядка т. Обозначим через С m (D) множество функций, непрерывных в области D вместе со всеми производными до порядка m включительно. Определение: Решением дифференциального уравнения (1) в некоторой области D изменения независимых переменных x1, x2…xn,. называется всякая функция и = и(х1, х2,…, xп) ∈ С m (D) такая, что подстановка этой функции и ее производных в уравнение (1) обращает последнее в тождество по x1, x2, …., хп в области D. Пример: Найти решение и = и(х,у) уравнения
Равенство (2) означает, что искомая функция и не зависит опт х, но может быть любой функцией от у, u = φ(y). (3) Таким образом, решение (3) уравнения (2) содержит одну произвольную функцию. Это — общее решение уравнения (2). Приме: Найти решение u = u(z, у) уравнения
Положим
где g(x) — произвольная функция. Так как w(у) — произвольная функция, то и интеграл от нее также является произвольной функцией; обозначим его через f(у). В результате получим решение уравнения (4) в виде u(x, y) = f(y) + g(x) (5) произвольные дифференцируемые функции). Решение (5) уравнения с частными производными 2-го порядка (4) содержит уже две произвольные функции. Его называют общим решением уравнения (4), так как всякое другое решение уравнения (4) может быть получено из (5) подходящим выбором функций f и g. Мы видим, таким образом, что уравнения с частными производными имеют целые семейства решений. Однако существуют уравнения с частными производными, множества решений которых весьма узки и, в некоторых случаях, да же пусты. Пример: Множество действительных решений уравнения
исчерпывается функцией u(x, y) = const, а уравнение
вовсе не имеет действительных решений. Мы не ставим пока вопрос об отыскании частных решений. Позже будет выяснено, какие дополнительные условия нужно задать, чтобы с их помощью можно было выделить частное решение, т.е. функцию, удовлетворяющую как дифференциальному уравнению, так и этим дополнительным условиям.
Линейные дифференциальные уравнения с частными производными. Свойства их решенийУравнение с частными производными называется линейным, если оно линейно относительно искомой функции и всех ее производных, входящих в уравнение; в противном случае уравнение называется нелинейным. Пример:
— линейное уравнение; уравнения
Линейное дифференциальное уравнение 2-го порядка для функции двух независимых переменных х, у в общем случае имеет вид
где А(х, у), В(х, у), …, с(х,у), f(x,y) — функции переменных х, у, заданные в некоторой области D плоскости хОу. Если f(x,y) ≡ 0 в D, то уравнение (1) называется однородным, в противном случае — неоднородным. Обозначив левую часть уравнения (1) через L[u], запишем (1) в виде L[u] = f(x, у). (2) Соответствующее однородное уравнение запишется так: L[u] = 0. (3) Здесь L — линейный дифференциальный оператор, определенный на линейном пространстве C 2 (D) функций и = и(х, у). Пользуясь свойством линейности оператора L, легко убедиться в справедливости следующих теорем, выражающих свойства решений линейных однородных дифференциальных уравнений с частными производными. Теорема: Если и(х, у) есть решение линейного однородного уравнения (3), то си(х, у), где с — любая постоянная, есть также решение уравнения (3). Теорема: Если и1(х, у) и и2(х, у) — решения линейного однородного уравнения (3), то сумма и1(х, у) + и2(x, у) есть также решение этого уравнения. Следствие: Если каждая из функций и1(х, у) и и2(х, у), u k(x, у) является решением уравнения (3), то линейная комбинация
где c1, c2 …, сk — произвольные постоянные, также является решением этого уравнения. В отличие от обыкновенного линейного однородного дифференциального уравнения, имеющего конечное число линейно независимых частных решений, линейная комбинация которых дает общее решение этого уравнения, уравнение с частными производными может иметь бесконечное множество линейно независимых частных решений. Пример:
имеет общее решение k = φ(х), так что решениями его будут, например, функции 1,х,…, х n ,… . В соответствии с этим в линейных задачах для уравнений с частными производными нам придется иметь дело не только с линейными комбинациями конечного числа решений, но и с рядами Возможны случаи, когда функция и(х, у; λ) при всех значениях параметра λ из некоторого интервала (λо, λ1), конечного или бесконечного, является решением уравнения (3). В этом случае говорят, что решения уравнения зависят от непрерывно меняющегося параметра λ. Если теперь взять функцию С(λ) такую, что первые и вторые производные интеграла
по х и по у могут быть получены с помощью дифференцирования под знаком интеграла, то этот интеграл также будет решением уравнения (3). Для линейного неоднородного уравнения L[u] = f (4) справедливы следующие предложения. Теорема: Если и(х, у) есть решение линейного неоднородного уравнения (4), a v(x, у) — решение соответствующего однородного уравнения (3), то сумма и + v есть решение неоднородного уравнения (4). Теорема: Принцип суперпозиции. Если и1(х, у) —решение уравнения L[u] = f1, a u2(x,y) — решение уравнения L[u] = f2, то и1 + u2 — решение уравнения L[u] = f1 + f2. Классификация линейных дифференциальных уравнений второго порядка с двумя независимыми переменнымиОпределение: Линейное дифференциальное уравнение второго порядка
в некоторой области Q на плоскости хОу называется 1) гиперболическим в Ω, если
2) параболическим в Ω, если 3) эллиптическим в Ω, если
Пользуясь этим определением, легко проверить, что уравнения
— гиперболические при всех х и у, уравнение
— параболическое при всех х и у, а уравнение
— эллиптическое при всех х и у. Уравнение
— эллиптическое при у > 0, параболическое на линии у = 0 и гиперболическое в полуплоскости у с помощью которой уравнение (1) преобразуется к более простому, каноническому виду, своему для каждого типа уравнения. Уравнение гиперболического типа (∆ > 0) преобразуется к вшу
(два канонических вида уравнений гиперболического типа). Уравнение параболического типа (∆ ≡ 0) преобразуется к виду
(канонический вид уравнения параболического типа). Уравнение эллиптического типа (∆ (канонический вид уравнения эллиптического типа). Здесь F и Ф — некоторые функции, зависящие от искомой функции и, ее первых производных В некоторых случаях каноническая форма уравнения позволяет найти общее решение исходного уравнения. Как правило, приведениеуравнения(1) к каноническому виду путем замены независимых переменных имеет локальный характер, т. е. осуществимо лишь в некоторой достаточно малой окрестности рассматриваемой точки Mo(xo, уo). Когда число п независимых переменных больше двух, также различают уравнения гиперболического, параболического и эллиптического типов. Например, при п = 4 простейшая каноническая форма таких уравнений имеет вид
Здесь и = и(х, у, z, t). Замечание: В общем случае, когда число независимых переменных больше двух, приведение линейною уравнения с переменными коэффициентами к каноническому виду возможно только в данной точке Мы ограничимся рассмотрением линейных дифференциальных уравнений 2-го порядка. К таким уравнениям приводит большое количество различных физических задач. Так, колебательные процессы различной природы (колебания струн, мембран, акустические колебания газа в трубах, электромагнитные колебания и т. д.) описываются уравнениями гиперболического типа. Простейшим из таких уравнений является уравнение колебаний струны (одномерное волновое уравнение): (2)
Здесь х — пространственная координата, t — время, Процессы теплопроводности и диффузии приводят к уравнениям параболического типа. В одномерном случае простейшее уравнение теплопроводности имеет вид
Здесь Наконец, установившиеся процессы, когда искомая функция не зависит от времени, определяются уравнениями эллиптического типа, типичным представителем которых является уравнение Лапласа
Непосредственной проверкой убеждаемся в том, что решением уравнения (2) является всякая функция и(х, t) вида
Можно показать, что решениями уравнения (3) являются функции вида
произвольные постоянные, А — числовой параметр). Интегрируя решение и(х, t; λ) = Наконец, нетрудно убедиться, что действительнозначные функции Рn(х,у) и Qn(x, у), определяемые из соотношения
являются решениями уравнения Лапласа (4) для п = 0, 1, 2…..Этот последний результат есть частный, случай общего утверждения, что и действительная и мнимая части аналитической функции f(z) = u(x, у) + iv(x, у) комплексного переменного z = х + iy являются решениями уравнения Лапласа (4). В силу линейности уравнения (4) ряды
тоже будут решениями уравнения (4), если они сходятся равномерно, как и ряды, полученные из них двукратным почленным дифференцированием по каждому из аргументов х, у. Таким образом, для простейшей — канонической — формы уравнений гиперболического, параболического и эллиптического типов мы располагаем о решениях этих уравнений некоторой информацией. Постановка основных задач для линейных дифференциальных уравнений второго порядкаДля полного описания того или иного физического процесса мало иметь только дифференциальное уравнение процесса, надо еще задать начальное состояние этого процесса (начальные условия) и режим на границе S той области Ω, в которой процесс происходит (граничные условия). Это обусловлено неединственностью решения дифференциальных уравнений. Пример: Общее решение уравнения
имеет вид и(х, у) = f(x) + g(y), где f(x) и g(y) — произвольные дифференцируемые функции. Поэтому чтобы выделить решение, описывающее данный физический процесс, необходимо задать дополнительные условия. Различают три основных типа задач для дифференциальных уравнений с частными производными (число независимых переменных равно п): а) задача Коши для уравнений гиперболического и параболического типов: задаются начальные условия, область Ω совпадает со всем пространством R n , граничные условия отсутствуют; б) краевая задача для уравнений эллиптического типа: задаются граничные условия на границе S области Ω, начальные условия отсутствуют; в) смешанная задача для уравнений гиперболического и параболического типов: задаются начальные и граничные условия, Ω ≠ R n Решение заданий и задач по предметам: Дополнительные лекции по высшей математике:
Образовательный сайт для студентов и школьников Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника. © Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института источники: http://pandia.ru/text/80/125/50498.php http://lfirmal.com/differencialnye-uravneniya-v-chastnyh-proizvodnyh/ |
 ,
,
 (условие Неймана);
(условие Неймана); ;
; ,
, в уравнении (21):
в уравнении (21): ,
, .
. , для всех[22] i=1 … N-1
, для всех[22] i=1 … N-1 ,
,  , …,
, …,  .
. , для всех i=1 … N-1.
, для всех i=1 … N-1. ,
, , являющейся точным решением дифференциального уравнения. Для демонстрации основных идей МКЭ, предположим, что с достаточной точностью искомое решение
, являющейся точным решением дифференциального уравнения. Для демонстрации основных идей МКЭ, предположим, что с достаточной точностью искомое решение 
 ,
, .
. , приведен на рис. 10. Необходимо отметить, что функция формы, является локальной, т.е. она отлична от нуля лишь в некоторой области, непосредственно прилегающей к рассматриваемому узлу xi. В частности, в случае кусочно-линейной интерполяции функции одной переменной
, приведен на рис. 10. Необходимо отметить, что функция формы, является локальной, т.е. она отлична от нуля лишь в некоторой области, непосредственно прилегающей к рассматриваемому узлу xi. В частности, в случае кусочно-линейной интерполяции функции одной переменной 
 .
. , хÎ[х0; хN].
, хÎ[х0; хN]. , хÎ[ х0; хN],
, хÎ[ х0; хN], , для всех i=1…N
, для всех i=1…N для всех i=1…N
для всех i=1…N


 , определенной на плоской сетке, содержащей треугольные конечные элементы.
, определенной на плоской сетке, содержащей треугольные конечные элементы.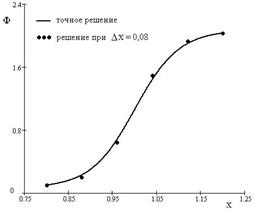

 ,
,

 ,
,
 ; D 2f=
; D 2f=

 двух переменных в конечных разностях, для сетки с квадратной ячейкой и
двух переменных в конечных разностях, для сетки с квадратной ячейкой и  — шагом сетки (см. рисунок):
— шагом сетки (см. рисунок):




 ,
,  ,
,  и т. д., например:
и т. д., например:


 ;
;
 X
X =
=


 Точки III — IX граничные точки.
Точки III — IX граничные точки. ;
; ;
;





 ;
;  ;
;






 ;
;
 системы уже имеет не такой простой вид и имеет ряд нестандартных строк..
системы уже имеет не такой простой вид и имеет ряд нестандартных строк.. При расчете прочности какой-либо реальной конструкции, оказывается, что для различных ее частей необходимо использовать различные дифференциальные уравнения. Так, например, для крыла работа поясов лонжеронов хорошо описывается с помощью уравнений растяжения-сжатия стержня; для стенок лонжеронов и нервюр хорошей математической моделью являются уравнения плоской задачи теории упругости; для обшивки подходит безмоментная теория оболочек. Между тем каждая из этих теорий описывается различными дифференциальными уравнениями. Значит, конечно-разностные аппроксимации этих уравнений будут различными. Кроме того, основные неизвестные в этих системах дифференциальных уравнений могут оказаться различными по физическому смыслу. Следовательно, возникает проблема увязки решений друг с другом. Таким образом, третья причина вытеснения МКР – сложности, возникающие при объединении различных математических моделей в единую расчетную схему.
При расчете прочности какой-либо реальной конструкции, оказывается, что для различных ее частей необходимо использовать различные дифференциальные уравнения. Так, например, для крыла работа поясов лонжеронов хорошо описывается с помощью уравнений растяжения-сжатия стержня; для стенок лонжеронов и нервюр хорошей математической моделью являются уравнения плоской задачи теории упругости; для обшивки подходит безмоментная теория оболочек. Между тем каждая из этих теорий описывается различными дифференциальными уравнениями. Значит, конечно-разностные аппроксимации этих уравнений будут различными. Кроме того, основные неизвестные в этих системах дифференциальных уравнений могут оказаться различными по физическому смыслу. Следовательно, возникает проблема увязки решений друг с другом. Таким образом, третья причина вытеснения МКР – сложности, возникающие при объединении различных математических моделей в единую расчетную схему.




 = о. Тогда уравнение (4) примет вид
= о. Тогда уравнение (4) примет вид  = 0. Его общим решением будет произвольная функция v = w(у). Поскольку v=
= 0. Его общим решением будет произвольная функция v = w(у). Поскольку v= 



 , членами которых являются произведения постоянных Сп на частные решения иn(х, у) дифференциального уравнения.
, членами которых являются произведения постоянных Сп на частные решения иn(х, у) дифференциального уравнения.








 и независимых переменных ξ, η. Вид функций F и Ф определяется исходным уравнением (1).
и независимых переменных ξ, η. Вид функций F и Ф определяется исходным уравнением (1).

 и невозможно в любой сколь угодно малой окрестности этой точки.
и невозможно в любой сколь угодно малой окрестности этой точки.
 где Т — натяжение струны, р — ее линейная плотность.
где Т — натяжение струны, р — ее линейная плотность.
 где р — плотность среды, с — удельная теплоемкость, k — коэффициент теплопроводности.
где р — плотность среды, с — удельная теплоемкость, k — коэффициент теплопроводности.



 уравнения (3) по параметру λ в пределах от — ∞ до + ∞ , получим так называемое фундаментальное решение U(x, t) =
уравнения (3) по параметру λ в пределах от — ∞ до + ∞ , получим так называемое фундаментальное решение U(x, t) =  уравнения теплопроводности.
уравнения теплопроводности.



