Для чего нужны уравнения связи
СКАЧАТЬ: 7-lekciya.zip [22,38 Kb] (cкачиваний: 40)
1. Связи и их уравнения.
2. Классификация связей.
3. Виртуальные перемещения. Виртуальная работа силы. Идеальные связи
4. Принцип возможных перемещений.
5. Общие теоремы динамики.
1. Тела, ограничивающие свободу перемещения точек данной механической системы, называется связями. В аналитической механике связи задаются уравнениями или неравенствами, в которые входят время координат всех или части точек системы и их производные по времени. В частности, для одной точки уравнение связи может иметь вид: f(x,y,z)=0 , где f(x,y,z) — заданная функция координат.
Например, связь в виде идеального стержня, ограничивающего перемещение материальной точки M(x,y,z) записывается уравнением: x2+y2+z2=l2
При свободном движении системы двух материальных точек M1 (x1,y1,z1) и M2 (x2,y2,z2) соединенных между собой идеальным стержнем. Уравнение связи из условия неизменности расстояния между точками будет иметь вид: (x2-x1)2+( y2-y1)2+( z2-z1)2=l2
Рассмотрим также две материальные точки, соединенные нерастяжимым стержнем, движущиеся в одной плоскости. Написать уравнение связи: выберем в качестве плоскости движения точки XY, тогда z1=0 и z2=0 – это уравнение связи.
Если точки, соединены стержнем, то расстояние между ними всегда l:
(x2-x1)2+( y2-y1)2=l2
Вывод: аналитическая механика позволяет описать поведение системы, минимальным количеством уравнения не вводя при этом неизвестные реакции связи. Этот метод аналитической механики нашел широкое применение в инженерной механики.
2. Связь называется голономной, если в уравнение связи входят координаты точек механической системы: f(x1,y1,z1,…xn,yn,zn,t)=0
Если в уравнении связи кроме координат входят еще и ее производные по времени и это дифференциальное уравнение не может быть проинтегрировано, то такая связь называется не голономной
Связь называют удерживающей, если она выражается математическим уравнением, и неудерживающей, если она выражается неравенством. Связь называется стационарной, если в уравнение если в уравнение связи время явно не входит, если же в в уравнение связи время входит явным образом, то связь называется нестационарной. Примером нестационарной связи является нить длина которой изменяется по заданному закону.
3. Виртуальным перемещением точки называется такое бесконечно малое элементарное перемещение d , которое допускается в рассматриваемый момент времени наложенными на точку связями, например, для связи в виде идеального стержня, виртуальное перемещение d всегда перпендикулярно радиусы сферы, по которой может перемещаться точка.
Виртуальное перемещение механической системы – это совокупность виртуальных перемещений точек этой системы.
Виртуальной работой силы называется, работа силы на виртуальном перемещении в точке ее приложения.
Связь называется идеальной если сумма работ реакций этой связи на любом виртуальном перемещении системы равна 0. Примером является шероховатая поверхность для катка, качающегося без катка, при отсутствии трения.
4. Для равновесия механической системы с идеальными м стационарными связями необходимо и достаточно чтобы сумма всех активных сил, приложенных к точкам системы была равна 0:
Доказательство необходимости: Пусть дана механическая система в равновесии. Нужно доказать, что , так как находится в равновесии, то равнодействующая сил и равнодействующая сил реакции связи приложенных к точке системы удовлетворяют условию равновесия статики: + = 0
Сообщаем системе виртуальное перемещение и умножим обе части каждого равенства на виртуальное перемещение к точке на и суммируем по всем точкам системы: , так как связи идеальные, то => => , необходимость доказана.
Докажем достаточность:
, доказать что механическая система в равновесии
Доказательство: Предположим, что при заданных условиях система не находится в равновесии, то есть при действии на систему активных сил, хотя бы одна точка точно получила перемещение .
+ ≠ 0 , так как для стационарной связи достаточное перемещение совпадает с одним из возможных перемещений.
= , ( + ) >0 суммируем ко всем точкам , так как связи идеальные => => — это противоречит условию => система находится в равновесии.
5. При движении механической системы с идеальными связями работа всех активных сил и сил инерции на любом виртуальном перемещении системы = 0.
Рассмотрим движение К-ой точки системы:
mk = +
= — mk
Мысленно зафиксируем время t и дадим системе виртуальное перемещение умножим скалярно каждое уравнение на и сложим их:
по определению идеальных связей последняя сумма равна 0 , следовательно , сумма
Связи и их классификация. Идеальные связи
В аналитической механике широко используются понятия: «механическая система»; «связи», наложенные на механическую систему. Уточним эти понятия и проведём их классификацию.
Связи – материальные тела, осуществляющие ограничения, налагаемые на положения и скорости точек механической системы, которые должны выполняться при любых действующих на систему силах.
Эти ограничения записываются в виде уравнений или ограничений.
Уравнения связей – уравнения, которым в силу наложенных связей должны удовлетворять координаты точек механической системы и их скорости (первые производные от координат по времени).
Геометрические связи – связи, уравнения которых содержат только координаты точек механической системы.
Эти связи выполнены в виде тел, поверхностей, линий и т. п. Например, связь в виде некоторой поверхности описывается уравнением f(X, Y, Z) = 0.
Дифференциальные связи – связи, уравнения которых, кроме координат точек механической системы, содержат ещё первые производные от этих координат по времени.
Уравнение такой связи имеет вид
f(X, Y, Z, dX/dt, dY/dt, dZ/dt) = 0.
Голономные связи – геометрические связи и дифференциальные связи, уравнения которых можно проинтегрировать.
Неголономные связи – дифференциальные связи, уравнения которых не могут быть проинтегрированы.
Стационарные связи – связи, в уравнения которых время явно не входит.
Например, геометрическая стационарная связь в виде невесомого стержня длины l, ограничивающая перемещение материальной точки (рис. 6.11), описывается уравнением

X 2 + Y 2 + Z 2 – l 2 = 0.
Если в рассматриваемом примере (рис. 6.11) вместо стержня будет нить, длина которой с течением времени изменяется, то такая связь будет геометрически нестационарной. Эта связь описывается уравнением
X 2 + Y 2 + Z 2 – l 2 (t) = 0.
Двусторнние (удерживающие) связи – связи, допускающие возможные перемещения только в двух взаимно противоположных направлениях.
Примером такого типа связи служит, например, кулисный камень. Эти связи описываются уравнением f(X, Y, Z, t) = 0.
Односторонние (неудерживающие) связи – связи, при которых точки механической системы имеют возможные перемещения, противоположные которым не являются возможными.
К связям такого типа относится, например, шарнирно-подвижная опора. Аналитически эти связи описываются неравенствами типа f(X, Y, Z, t) ≥ 0.
Механическая система – любая совокупность материальных точек, движения которых взаимозависимы.
Голономная система – механическая система, на которую наложены голономные связи.
Неголономная система – механическая система, на которую наложена хотя бы одна неголономная связь.
Возможное перемещение системы – любая совокупность возможных перемещений точек данной механической системы, допускаемая всеми наложенными на неё связями.
Рассмотрим понятие «возможная работа силы», которое также широко применяют в аналитической механике.
Возможная (элементарная) работа силы – бесконечно малая величина, равная скалярному произведению вектора силы F на вектор возможного перемещения δS точки её приложения.

На рис. 6.12 показаны векторы F и δS.
Согласно рис. 6.12 и определению возможную работу δA(F) силы F определяют по формуле
δA(F) = F·δS = F·δS·cos(F, δS) = F·δS·cos(α).
В зависимости от величины угла α возможная работа δA(F) может быть положительной, отрицательной или равной нулю.
Рассмотрим случай, при котором под действием силы F тело совершает вращательное движение относительно оси ОХ (рис. 6.13).
При вращении тела возможную работу δA(F) силы F на возможном угловом перемещении δφ в общем случае определяют по формуле
δA(F) = ± МОХ(F)·δφ = ± (F·h)·δφ,
 |
где МОХ(F) – момент силы F относительно оси ОХ вращения; h – плечо силы F относительно оси вращения.
Следует отметить, что при совпадении направления МОХ(F) и δφ возможная работа δA(F) > 0. Если направления МОХ(F) и δφ противоположны, то δA(F)
Дата добавления: 2015-05-30 ; просмотров: 6323 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
iSopromat.ru

Связями называют тела, ограничивающие свободу перемещения рассматриваемого тела.
Реакции связей — это усилия, с которыми связи действуют на данное тело.
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Подробнее про связи и реакции связей смотрите в нашем видео:

Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными. Ниже приведены примеры замены связей их реакциями. На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.
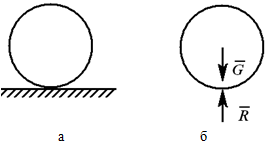
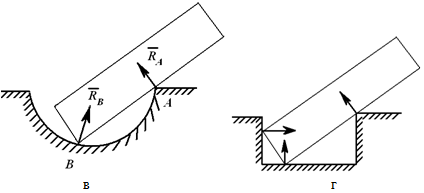
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1). Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль троса (нити, цепи, стержня) (рисунок 1.2).

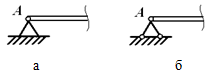
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б). Она может быть заменена либо силой R с углом α (рисунок 1.3, в), либо двумя силами, например, XA и YA (рисунок 1.3, г).
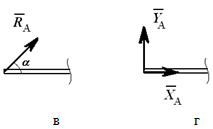
Всегда можно перейти от R и α к XA и YA (и наоборот):

Шарнирно-подвижная опора (рисунок 1.4, а) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное. Реакция направлена по нормали к опорной поверхности (рисунок 1.4, б).
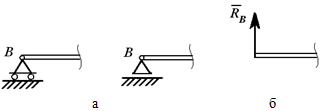
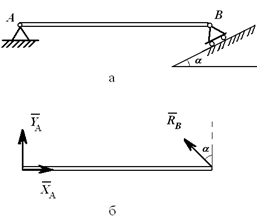
Связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рисунок 1.5, б), их действие заменено силами XA, YA и RB.
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и момента MD.

На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет момент MC (рисунок 1.7, б).

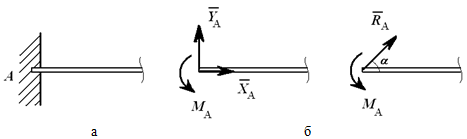
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
На рисунках 1.9 – 1.15 показаны примеры замены сил, расположенных в пространстве, их реакциями.
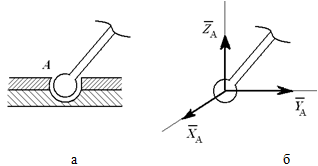
Шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменена системой сил (рисунок 1.9, б) XA, YA и ZA, т.е. силой, неизвестной по величине и направлению.
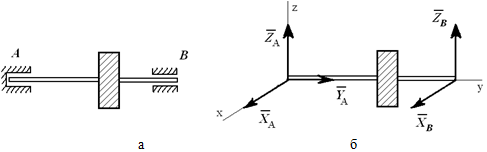
На рисунке 1.10, а показан вал, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рисунок 1.10, б).
На рисунках 1.11 и 1.12 приведены примеры замены различных связей их реакциями.
http://helpiks.org/3-65420.html
http://isopromat.ru/teormeh/obzornyj-kurs/svyazi-i-ih-reakcii