Новое в блогах

Приложения пользователя
Двойной маятник — это, несомненно, настоящее чудо природы. Поразителен скачок сложности, который наблюдается при переходе от простого одиночного маятника к двойному. Колебания простого маятника имеют регулярный характер. При малых отклонениях от равновесия такие колебания являются гармоническими и описываются функцией синус или косинус. В случае нелинейных колебаний период зависит от амплитуды, но регулярность движения сохраняется. Другими словами, в случае простого маятника приближение малых колебаний вполне отражает существенные свойства системы.
Двойной маятник «ведет себя» совершенно иначе. Уже в режиме малых колебаний у двойного маятника возникает такое новое явление как эффект биений . А при увеличении энергии характер колебаний маятников меняется принципиально − колебания становятся хаотическими . Несмотря на то, что двойной маятник можно описать системой нескольких обыкновенных дифференциальных уравнений, то есть вполне детерминированной моделью, появление хаоса выглядит очень необычно. Данная ситуация напоминает систему Лоренца , где детерминированная модель из трех уравнений также демонстрирует хаотическое поведение. Попробуйте поэкспериментировать с приведенным ниже приложением и понаблюдайте за движением двойного маятника при различных отношениях масс тел и начальных углах.
Далее мы займемся построением математической модели двойного маятника в виде системы нелинейных дифференциальных уравнений. Начнем с вывода уравнений Лагранжа .
В лагранжевой механике для описания системы используются обобщенные координаты и обобщенные скорости . В нашем случае в качестве таких переменных можно взять углы отклонения маятников α1 , α2 и угловые скорости  . Используя указанные переменные, построим лагранжиан двойного маятника и запишем дифференциальные уравнения Лагранжа.
. Используя указанные переменные, построим лагранжиан двойного маятника и запишем дифференциальные уравнения Лагранжа.
Упрощенная модель двойного маятника показана на рисунке 1. Будем считать стержни невесомыми. Их длины равны l1 и l2 . Массы точечных тел (они представлены шарами конечного радиуса) составляют m1 и m2 . В точках подвеса трение отсутствует.
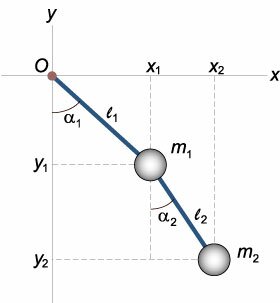
Введем систему координат O xy , начало которой совпадает с точкой подвеса. Координаты маятников определяются следующими соотношениями:

Кинетическая и потенциальная энергия маятников (соответственно T и V ) выражаются формулами

Тогда лагранжиан записывается в виде


В результате лагранжиан системы принимает такой вид:

Теперь мы можем составить уравнения Лагранжа (иногда их называют уравнениями Эйлера-Лагранжа ):
Входящие в уравнения частные производные выражаются следующими формулами:

Следовательно, первое уравнение Лагранжа записывается как
Сокращая на l1 ≠ 0 , получаем:

Аналогично выведем второе дифференциальное уравнение:
После сокращения на m2l1 ≠ 0 уравнение принимает такой вид:

Таким образом, нелинейная система двух дифференциальных уравнений Лагранжа записывается как

Если считать углы α1(t) , α2(t) малыми, то колебания маятников вблизи нулевого положения равновесия можно описать линейной системой уравнений. Чтобы получить такую систему, вернемся назад к исходному лагранжиану системы:

Запишем этот лагранжиан в более простом виде, раскладывая его в ряд Маклорена и сохраняя линейные и квадратичные члены. Тригонометрические функции можно заменить следующими приближенными выражениями:

Здесь мы учли, что слагаемое с cos(α1 − α2) содержит произведение малых величин  и имеет второй порядок малости. Поэтому в разложении косинуса можно ограничиться линейным членом.
и имеет второй порядок малости. Поэтому в разложении косинуса можно ограничиться линейным членом.
Подставляя это в исходный лагранжиан и учитывая, что потенциальная энергия определяется с точностью до константы, получаем квадратичный лагранжиан двойного маятника в виде:

Выведем дифференциальные уравнения Лагранжа для данного лагранжиана. Они записываются в таком виде:

Найдем частные производные:
Получаем систему двух дифференциальных уравнений Лагранжа:
Данную систему уравнений можно записать в компактной матричной форме. Введем матрицы

Тогда система дифференциальных уравнений представляется в виде

В случае одного тела такое уравнение описывает свободные незатухающие колебания с определенной частотой. В случае двойного маятника решение (как вы увидим ниже) будет содержать колебания с двумя характерными частотами, которые называются нормальными модами . Нормальные моды представляют собой действительную часть комплекснозначной векторной функции
где H1 , H2 − собственные векторы, ω − действительная частота. Значения нормальных частот ω1, 2 определяются из решения характеристического уравнения
Выведем общие формулы для циклических частот ω1, 2 в случае произвольных масс m1 , m2 и длин l1 , l2 :
Мы получили биквадратное уравнение для частот ω . Вычислим дискриминант:

Таким образом, квадраты нормальных частот ω1, 2 равны


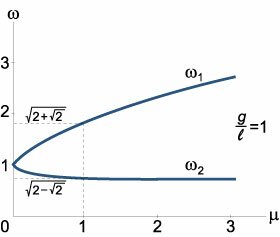
Данное выражение является несколько громоздким. Поэтому далее рассмотрим случай, когда длины стержней обоих маятников равны: l1 = l2 = l . Тогда нормальные частоты будут определяться более компактной формулой

Как видно, собственные частоты ω1, 2 зависят лишь от отношения масс μ = m2/m1 . Зависимости частот ω1 , ω2 от параметра μ (при условии g/l = 1 ) показаны выше на рисунке 2. В частности, при равных массах m1 = m2 = m , т.е. при μ = 1 , собственные частоты равны
Теперь, после того как собственные частоты ω1, 2 известны, для описания нормальных мод нужно определить еще собственные векторы H1, 2 . Они находятся из решения векторно-матричного уравнения
Пусть собственный вектор H1 = (H11, H21) T (верхний индекс T означает операцию транспонирования) соответствует нормальной частоте ω1 . Тогда получаем следующее уравнение для определения H1 :

Координаты собственного вектора H1 удовлетворяют уравнению
Таким образом, собственный вектор H1 равен
Аналогичным образом найдем координаты второго собственного вектора H2 = (H12, H22) T :
Следовательно, собственный вектор H2 имеет такие координаты:
Общее решение матричного уравнения записывается в виде

где постоянные C1 , C2 , φ1 , φ2 зависят от начальных положений и скоростей маятников.
Рассмотрим характер малых колебаний для некоторого конкретного набора начальных данных. Пусть, например, координаты и скорости маятников в начальный момент имеют такие значения:

В этом случае начальные фазы равны нулю: φ1 = φ2 = 0 . Определим постоянные C1 и C2 :
Тогда закон колебаний маятников выражается формулами

где циклические частоты ω1, 2 определяются соотношением
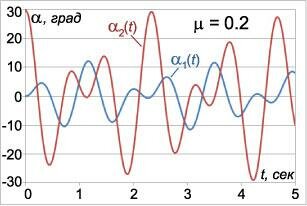
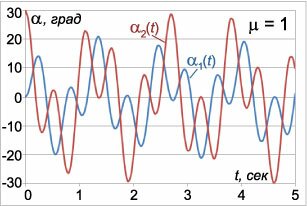
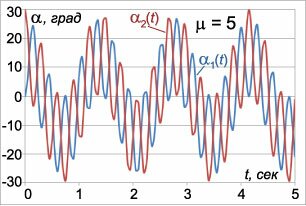
Здесь углы α1(t) , α2(t) выражаются в радианах, а время t в секундах. На рисунках 3-5 приведены графики малых колебаний маятников для трех значений μ : μ1 = 0.2 , μ2 = 1 , μ3 = 5 , при условии l = l1 = l2 = 0.25 м , g = 9.8 м/c 2 . Углы отклонения маятников для удобства приведены в градусах. Из графиков видно, что в системе происходят биения , при которых энергия циклически переходит от одного маятника к другому. Когда один маятник почти останавливается, другой раскачивается с максимальной амплитудой. Через некоторое время маятники «меняются ролями» и так далее. Колебания с большей частотой ω1 модулируются более низкочастотными колебаниями с частотой ω2 . Это особенно хорошо заметно на рисунке 5 при большом значении μ ( μ3 = 5 ), когда разница между частотами ω1 и ω2 велика.
![]()
Итак, малые колебания двойного маятника имеют периодический характер и описываются суммой двух гармоник с частотами ω1 , ω2 , зависящими от параметров системы. Характерным свойством малых колебаний двойного маятника является эффект биений .
Вернемся теперь снова к исходной нелинейной системе уравнений и исследуем характер колебаний с произвольной амплитудой. Такая система уравнений не решается аналитически. Поэтому мы будем рассматривать численную модель двойного маятника.
Приведенные выше уравнения Лагранжа являются дифференциальными уравнениями второго порядка. Их удобнее преобразовать в форму канонических уравнений Гамильтона . В результате вместо 2 уравнений второго порядка мы получим систему 4 дифференциальных уравнений первого порядка.
В гамильтоновой механике состояние системы определяется обобщенными координатами и обобщенными импульсами . В нашем случае в качестве обобщенных координат мы снова, как и в уравнениях Лагранжа, будем использовать углы α1 , α2 . Вместо обобщенных скоростей (в лагранжиане) введем теперь обобщенные импульсы p1 , p2 , связанные со скоростями формулами
или в краткой записи:
Переход от лагранжевой к гамильтоновой форме уравнений производится с помощью преобразования Лежандра , которое определяется следующим образом.
Предположим, что f ( x ) − гладкая выпуклая вниз функция (рисунок 6). Рассмотрим прямую y = px , проходящую через начало координат. Расстояние между прямой y = px и функцией y = f(x) вдоль оси O y зависит от координаты x . При определенном значении x это расстояние будет максимальным. Ясно, что оно зависит от наклона прямой, т.е. от параметра p . Таким образом мы вводим новую функцию g ( p ):

Такое преобразование функции f ( x ) в сопряженную функцию g ( p ) называется преобразованием Лежандра . Заметим, что функция g ( p ) достигает максимального значения по переменной x когда p = df/dx . Действительно,

Зная зависимость p ( x ), можно найти обратную функцию x ( p ). Тогда преобразование Лежандра будет выражаться соотношением

Преобразование Лежандра легко обобщается на случай функций нескольких переменных. В модели двойного маятника переход от функции Лагранжа к функции Гамильтона описывается преобразованием Лежандра в форме:
В этом выражении L является лагранжианом, а функция H представляет собой гамильтониан системы, который зависит от обобщенных координат α1 , α2 и обобщенных импульсов p1 , p2 .
В результате такого преобразования каждое уравнение Лагранжа переходит в систему двух канонических уравнений Гамильтона, имеющих вид:
Определим теперь конкретный вид уравнений Гамильтона для двойного маятника. Обобщенные импульсы p1 , p2 выражаются через частные производные лагранжиана в виде
Решим эту систему уравнений и выразим угловые скорости через обобщенные координаты и импульсы. Воспользуемся формулами Крамера и вычислим соответствующие определители:
Отсюда получаем следующие выражения для угловых скоростей:
Эти формулы представляют собой первые 2 (из 4) дифференциальных уравнений Гамильтона. С учетом данных выражений гамильтониан можно записать в следующем виде:
Последнюю формулу можно представить как
Числитель N в этом выражении является весьма громоздким. Упростим его:
Следовательно, функция Гамильтона принимает такой вид:

Здесь первое слагаемое представляет собой обобщенную кинетическую энергию T , а два других слагаемых − потенциальную энергию V , т.е. гамильтониан H определяется как


Теперь мы можем составить еще два дифференциальных уравнения Гамильтона для обобщенных импульсов:

Вычислим отдельно частные производные обобщенной кинетической энергии:
где символами A1 и A2 обозначены выражения

Производная кинетической энергии T по переменной α2 будет иметь такой же вид, только с противоположным знаком:

Отсюда получаем уравнения Гамильтона в виде:
Итак, в результате громоздких преобразований мы получили то, к чему так долго стремились − систему 4 канонических уравнений Гамильтона, описывающих движение двойного маятника. Запишем их вместе в окончательном виде:

Теперь можно приступить к численному анализу уравнений.
Наиболее распространенным методом численного решения дифференциальных уравнений является метод Рунге-Кутты 4-го или 5-го порядка точности. Различные вариации этого метода используются в большинстве математических пакетов (MatLab, Maple, Mathematica, Mathcad), как правило, с автоматическим контролем точности и адаптивным временным шагом.
Для моделирования движения двойного маятника мы также воспользуемся классическим методом Рунге-Кутты 4-го порядка точности. Предварительно несколько упростим дифференциальные уравнения, полагая, что длины маятников одинаковы: l1 = l2 = l . Введем также параметр μ , равный отношению массы второго маятника к массе первого: μ = m2/m1 . Тогда система уравнений принимает следующий вид:

Данную систему можно переписать в векторной форме:

Вектор Z составлен из 4-х канонических переменных данной системы, а компоненты вектора f соответствуют правым частям дифференциальных уравнений.
Метод Рунге-Кутты предполагает на каждом шаге последовательное вычисление четырех промежуточных векторов:

Значение вектора Zn+1 в следующем временном узле вычисляется по формуле

Суммарная ошибка данного алгоритма на конечном интервале имеет порядок O(τ 4 ) , т.е. точность вычислений возрастает в 16 раз при уменьшении временного шага τ в два раза.
Описанная модель реализована в анимации, приведенной в начале web-страницы. Для упрощения мы положили начальные углы отклонения маятников равными: α1 = α2 = α . Данное приложение наглядно демонстрирует хаотическую динамику двойного маятника при различных значениях параметров μ и α . Интересно, что в некоторых режимах в системе возникают устойчивые траектории, как, например, на рисунке 7 , или компактные области притяжения, как на рисунке 8. Похоже, что двойной маятник еще не полностью изучен физиками и математиками и таит в себе много неожиданностей.


 Анатолий Валетов # написал комментарий 11 февраля 2014, 21:03 Пусть в точках подвеса действуют моменты М1(t), M2(t). Масса шариков m1, m2, гравитации нет, стержни невесомые. Найти уравнения движения. Можно сначала принять моменты постоянными.
Анатолий Валетов # написал комментарий 11 февраля 2014, 21:03 Пусть в точках подвеса действуют моменты М1(t), M2(t). Масса шариков m1, m2, гравитации нет, стержни невесомые. Найти уравнения движения. Можно сначала принять моменты постоянными.
И обратная задача — даны уравнения движения, найти М1(t), M2(t)
Анатолий Валетов # ответил на комментарий Микола Борисiв 11 февраля 2014, 21:51 Т.е. обратная задача в таком случае явяется скорее всего так называемой «некорректно поставленой».
===
Представьте кульман с чертежным пантографом. Ведь каждой точке на доске соответствует строго определенное положение системы рычагов. Вот посмотрите на картинку, на мой взгляд тут есть взаимно-однозначное соответствие между динамическим уравнением происходящего на узлах и кинематическим уравнение движения карандаша.

Анатолий Валетов # ответил на комментарий Микола Борисiв 11 февраля 2014, 22:08 Не нашел точной картинки, но можно и по этой понять, если выкинуть пантограф и оставить два рычага. Двух коротких рычагов представьте что нет.
Мне хотя бы название области механики где про это почитать. Имеется ввиду манипулятор. Ну как «рука» у робота, и какие силы в узлах прикладывать чтобы она двигалась в нужном направлении.
В трех измерениях конечно будет неоднозначность, а на плоскости по-моему нет.