Электромеханические аналогии и уравнения лагранжа
В этом параграфе мы покажем, каким образом уравнения аналитической механики могут быть применены не только к механическим, но и к электрическим и электромеханическим системам.
Рассмотрим контур, в котором индуктивность  омическое сопротивление
омическое сопротивление  и конденсатор с емкостью С
и конденсатор с емкостью С
соединены последовательно (рис. 26). Для этих элементов связь между напряжением и (разность между значениями потенциала на концах элемента) и величиной тока  где — заряд) будет соответственно равна
где — заряд) будет соответственно равна

Если в контуре имеется еще внешний источник э. д. с.  , то, записывая, что величина э. д. с. равна сумме напряжений для отдельных элементов, будем иметь
, то, записывая, что величина э. д. с. равна сумме напряжений для отдельных элементов, будем иметь


Это уравнение является аналогом уравнения механических колебаний



При этом индуктивности  отвечает инерционный коэффициент (обобщенная масса) а, омическому сопротивлению
отвечает инерционный коэффициент (обобщенная масса) а, омическому сопротивлению  — диссипативный коэффициент
— диссипативный коэффициент  коэффициенту где С — емкость, отвечает приведенный коэффициент упругой силы с, заряд
коэффициенту где С — емкость, отвечает приведенный коэффициент упругой силы с, заряд  соответствует обобщенной координате q, э. д. с.
соответствует обобщенной координате q, э. д. с.  — обобщенной силе
— обобщенной силе 
С другой стороны, в контуре, изображенном на рис. 26, складываются токи, проходящие через индуктивный элемент,
сопротивление и конденсатор, поэтому

Почленно дифференцируя, получаем:

Здесь мы имеем другую систему аналогий, в которой координате  соответствует напряжение и и механические коэффициенты
соответствует напряжение и и механические коэффициенты  с заменяются на
с заменяются на  обобщенной силе
обобщенной силе  здесь отвечает величина
здесь отвечает величина 
Две электрические системы, имеющие одинаковые (с точностью до обозначений) уравнения, представляют собой две разные электрические модели одной и той же механической системы.
Кинетической и потенциальной энергиям, функции Релея, обобщенной силе у механической системы с одной степенью свободы

в первой системе аналогий соответствуют величины


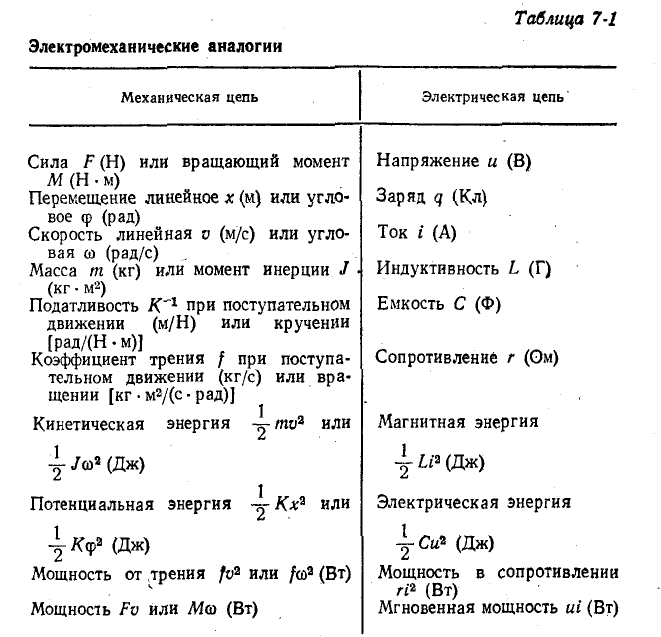
Таким образом, системы электромеханических аналогий определяются следующей таблицей:

Рассмотрим в качестве более сложного примера электрическую цепь, изображенную на рис. 27.

Составим уравнения Лагранжа, придерживаясь первой системы аналогий; предварительно вычислим

Кроме того,  . Положим
. Положим

Теперь выпишем уравнения Лагранжа

Эти уравнения и будут уравнениями электрической цепи, изображенной на рис. 27.
Жесткость C
Инверсная индуктивность Г
Кинетическая энергия 
Энергия магнитного поля 
Энергия электрического поля 
Потенциальная энергия 
Энергия электрического поля 
Энергия магнитного поля 
Мощность рассеяния 
Мощность рассеяния 
Мощность рассеяния 
Первая система аналогий между механическими и электрическими цепями более «физична», поэтому в основном 6удем пользоваться ею, хотя в некоторых случаях применение второй системы дает более простые уравнения.
Из этой системы видно, что ЭДС в электрической цепи аналогична силе, индуктивность аналогична массе и обладает инерционностью, и энергия, запасаемая в магнитном поле, является кинетической энергией. Конденсатор, аналогично пружине, запасает энергию, которую логично считать потенциальной. Активное сопротивление действует аналогично механическому вязкому сопротивлению, и энергия, выделяемая на нем, рассеивается в виде тепла.
Тогда простейшей механической цепи, содержащей массу, пружину и вязкое сопротивление, и описываемой уравнением вида

можно поставить в соответствие простейшую электрическую цепь с последовательно включенными индуктивностью, емкостью и сопротивлением, описываемую уравнением

где L · q «- ЭДС самоиндукции, R · q `- падение напряжения на сопротивлении, S · q — напряжение на емкости.
В электротехнике обычно это уравнение записывается в виде:
Электромеханическую систему, имеющую Sm степеней механической свободы и S 1 независимых электрических контуров, учитывая электромеханические аналогии, можно представить в виде механической системы, имеющей Sm + S 1 степеней свободы и обладающей
- суммарной электромеханической кинетической энергией TΣ = TM + WM ;
- потенциальной энергией П Σ =ПМ+ W Э ;
- мощностью рассеяния DΣ = DM + D Э .
Отсюда движение в такой системе будет описываться уравнениями, аналогичными уравнениям Лагранжа и называемыми уравнениями Лагранжа-Максвелла :
 ,
,



Первые Sm уравнений описывают механические движения в системе (механические уравнения), последующие S 1 уравнений описывают процессы в электрических цепях (электрические уравнения — уравнения 2-го закона Кирхгофа).
1.3. Энергия электрического и магнитного полей. Силы и моменты, возникающие при электромеханическом преобразовании энергии
В общем виде энергия электрического поля в объеме V выражается интегралом
 ,
,
где E — вектор напряженности электрического поля, D — вектор смещения.
Для однородного поля в конденсаторе

Энергия магнитного ноля в объеме V также выражается интегралом
где B — вектор магнитной индукции, H — вектор напряженности магнитного поля.
Для однородного магнитного поля
Для n магнитно связанных контуров с токами получим:
 ,
,
где Ljk — индуктивности и взаимные индуктивности контуров
Или  , где Y j — потокосцепление контуров.
, где Y j — потокосцепление контуров.
Тогда для одиночного контура с током имеем: 
для двух контуров:  ;
;
для контура с током, помещенного в магнитный поток Φ:  ,
,
где L — индуктивность контура, Y — потокосцепление внешнего потока F с контуром.
Рассмотрим гипотетическую электромеханическую систему. в которой механически связаны контур с током, помещенный в магнитное поле, и ротор конденсатора, причем при повороте происходит изменение индуктивности контура, потокосцепления с контуром и емкости конденсатора.
Общая кинетическая энергия такой системы будет:
 ;
;
 ;
;

Подставляя это выражение в уравнение Лагранжа-Максвелла и принимая за обобщенную координату h — угол поворота f , а также считая, что внешняя сила отсутствует, получим два уравнения — механическое и электрическое

Из первого (механического) уравнения получаем силы (в данном случае — моменты), возникающие при электромеханическом преобразовании энергии :
 — сила (момент), вызванная изменением индуктивности от изменения координаты (угла поворота) — злектромагнитная сила,
— сила (момент), вызванная изменением индуктивности от изменения координаты (угла поворота) — злектромагнитная сила,- — сила (момент), действующая на проводник (контур) с таком, помещенный в магнитный поток,- магнитоэлектрический момент,
- — сила (момент), вызванная электрическим полем при механическом изменении емкости конденсатора .
 — сила (момент), вызванная изменением индуктивности от изменения координаты (угла поворота) — злектромагнитная сила,
— сила (момент), вызванная изменением индуктивности от изменения координаты (угла поворота) — злектромагнитная сила, — сила (момент), действующая на проводник (контур) с таком, помещенный в магнитный поток,- магнитоэлектрический момент,
— сила (момент), действующая на проводник (контур) с таком, помещенный в магнитный поток,- магнитоэлектрический момент, — сила (момент), вызванная электрическим полем при механическом изменении емкости конденсатора .
— сила (момент), вызванная электрическим полем при механическом изменении емкости конденсатора .Реально в технике применяются преобразователи, в которых действует только одна из перечисленных сил — электромагнитные, магнитоэлектрические, электростатические.
Слагаемые второго, электрического уравнения являются электрическими реакциями системы:
- — противоЭДС, вызванная изменением индуктивности при повороте контура с током (если индуктивность изменяется, что происходит не всегда);
- — ЭДС индукции, вызванная вращением контура в магнитном поле;
- — ЭДС самоиндукции;
- — напряжение конденсатора;
- R · i — падение напряжения на сопротивлении.
 — противоЭДС, вызванная изменением индуктивности при повороте контура с током (если индуктивность изменяется, что происходит не всегда);
— противоЭДС, вызванная изменением индуктивности при повороте контура с током (если индуктивность изменяется, что происходит не всегда); — ЭДС индукции, вызванная вращением контура в магнитном поле;
— ЭДС индукции, вызванная вращением контура в магнитном поле; — ЭДС самоиндукции;
— ЭДС самоиндукции; — напряжение конденсатора;
— напряжение конденсатора;Эквивалентная схема электрической цепи такой системы имеет вид на  .
.
Рис. 1-1. Эквивалентная схема гипотетической электромеханической системы
1.4. Электромагнитные, электродинамические и электростатические преобразователи.
1.4.1. Электромагнитные преобразователи.
В электромагнитном преобразователе усилие создается за счет изменения магнитной энергии, запасенной в катушке индуктивности L при перемещении сердечника. Магнитная и энергия и энергия рассеяния имеют следующий вид:
 ,
, 
В этих системах  , поэтому дифференциальные уравнения имеют вид (при отсутствии внешней силы):
, поэтому дифференциальные уравнения имеют вид (при отсутствии внешней силы):
 ;
;
Типичным преобразователем такого типа является электромагнитное реле, схема которого приведена на  .
.
Рис. 1-2. Электромагнитное реле.
Реле представляет собой электромагнит с контактами К. При подаче напряжения U на обмотку электромагнита, имеющую индуктивность L и активное сопротивление R создается электромагнитное тяговое усилие  , которое притягивает якорь Р, изменяя его положение относительно сердечника 1 (координату h от 0 до d ), при этом происходит переключение контактов К.
, которое притягивает якорь Р, изменяя его положение относительно сердечника 1 (координату h от 0 до d ), при этом происходит переключение контактов К.
Из анализа дифференциальных уравнений имеем:
- m · h «- сила инерции,
- r · h `- сила вязкого сопротивления, которой в реле можно пренебречь,
- c · h — сила сопротивления возвратной пружины ВП, имеющей жесткость С,
- — тяговое усилие,
- — ЭДС, вызванная изменением индуктивности при перемещении якоря,
- — ЭДС, вызванная изменением тока,
- R · i — падение напряжения на активном сопротивлении обмотки реле.
 — тяговое усилие,
— тяговое усилие, — ЭДС, вызванная изменением индуктивности при перемещении якоря,
— ЭДС, вызванная изменением индуктивности при перемещении якоря, — ЭДС, вызванная изменением тока,
— ЭДС, вызванная изменением тока,Итак, тяговое усилие реле определяется изменением индуктивности L при перемещении якоря. При показанной на конструкции реле (клапанного типа) и малом перемещении якоря можно считать, что
 .
.
Тогда  , откуда
, откуда  , где
, где  .
.
При включении репе на постоянное напряжение, как эта обычно бывает, процесс описывается нелинейными дифференциальными уравнениями:
 , где
, где 
Тогда так называемые тяговые характеристики реле имеют вид на  .
.
Рис. 1-3а. Механические характеристики электромагнитного реле
Характеристики вход-выход имеют скачкообразный характер (  ).
).
Рис. 1-3б. Характеристики «вход-выход» электромагнитного реле.
Переходный процесс при включении реле показан на  .
.
Рис. 1-4. Переходный процесс при включении реле.
Модель электромагнитного реле приведена в  .
.
1.4.2. Электродинамические преобразователи.
В магнитоэлектрической (электродинамической) системе усилие создается за счет изменения второй составляющей магнитной энергии Y (h) × i . То есть уравнения имеют следующий вид:
 ;
;
Электродинамический принцип преобразования энергии используется в электроизмерительных приборах, содержащих постоянный магнит, двигателях постоянного тока, тахогенераторах постоянного тока. В этих устройствах обобщенной характеристикой является угол поворота ротора f и уравнения имеют вид:
 ;
;
Обычно обозначают угловую частоту вращения  , тогда
, тогда
 ;
;
- — момент сопротивления, вызванный механической инерционностью системы ( I — момент инерции системы),
- ρ·ω- момент вязкого сопротивления,
- σ· f — момент упругого сопротивления,
- — вращающий момент,
- Mc — статический момент сопротивления,
- — ЭДС индукции (вращения),
- — ЭДС самоиндукции,
- R · i — падение напряжения на активном сопротивлении.
 — момент сопротивления, вызванный механической инерционностью системы ( I — момент инерции системы),
— момент сопротивления, вызванный механической инерционностью системы ( I — момент инерции системы), — вращающий момент,
— вращающий момент, — ЭДС индукции (вращения),
— ЭДС индукции (вращения), — ЭДС самоиндукции,
— ЭДС самоиндукции,При применении преобразователя как исполнительного устройства (измерительного прибора) используется факт возникновения магнитоэлектрического вращающего момента, пропорционального току в цепи ротора. При применении его как датчика скорости используется возникновение в цепи ЭДС индукции, пропорциональной частоте вращения ротора. В этом случае электрическое уравнение преобразователя имеет вид :
И в установившемся режиме, когда  , имеем
, имеем  .
.
В частности, при повороте в магнитном поле с индукцией B рамки длиной 1 и радиусом r имеем dΨ = r ·ω· B ·1· r · d f , откуда  .
.
Основным достоинством электродинамических систем является линейность их характеристик.
1.4.3. Электростатические преобразователи.
В электростатических системах используется энергия электрического поля, запасенная в конденсаторе
 ;
;

В этом случае дифференциальные уравнения таковы:
 ;
;

Здесь  — тяговое усилие, S × q — напряжение на конденсаторе
— тяговое усилие, S × q — напряжение на конденсаторе  .
.
Эти уравнения имеют меньше слагаемых, чем уравнения индукционных систем, поэтому электростатические преобразователи обладают меньшими возможностями и получили меньшее распространение.
Исполнительные устройства электростатического типа очень маломощны, так как электрическое поле в единице объема может сконцентрировать гораздо меньше энергии, чем магнитное. Поэтому тяговое усилие  сравнительно небольшое. Исполнительные устройства такого типа применяются в основном как измерительные и индикаторные.
сравнительно небольшое. Исполнительные устройства такого типа применяются в основном как измерительные и индикаторные.
Возможности электростатического преобразователя как датчика, как видно из электрического уравнения, также ограничены, так как он не может индуцировать ЭДС и является, по существу, пассивным емкостным датчиком с уравнением вида:
Обозначив Uc — напряжение на конденсаторе, получим :


Пассивный емкостной преобразователь переменного тока.
1.5. Классификация электромеханических преобразователей
Электромеханические преобразователи, применяемые в системах автоматики и вычислительной технике, можно классифицировать по назначению, конструктивному исполнению и принципу действия (см.  ).
).
Рис. 1-5. Классификация электромеханических преобразователей.
1.6. Представление электромеханических преобразователей как преобразователей сигналов (информации)
При применении электромеханических преобразователей в системах автоматического управления они рассматриваются не как энергетические устройства, а как информационные преобразователи сигналов при их прохождении от входов к выходам (см.  ).
).
Рис. 1-6а. Функциональная схема динамической системы.
Если электромеханический преобразователь описывается исходными линейными или линеаризованными дифференциальными уравнениями, то от них можно перейти к дифференциальным уравнениям «вход-выход» вида

где y ( t ) и u ( t ) — векторы выходных и входных координат
 ;
;  — полиномиальные матрицы,
— полиномиальные матрицы,
 — оператор дифференцирования по времени.
— оператор дифференцирования по времени.
Перейти от исходных энергетических уравнений к уравнениям «вход-выход» удобно, используя структурные схемы и передаточные функции. Типичная структурная схема имеет вид, представленный на  , где W ( p ) — передаточные функции, а u ( p ), y ( p ), i ( p ) — изображения входных, выходных и внутренних переменных ( p = c + j·ω ).
, где W ( p ) — передаточные функции, а u ( p ), y ( p ), i ( p ) — изображения входных, выходных и внутренних переменных ( p = c + j·ω ).
Рис. 1-6б. Структурная схема динамической системы.
Уравнение «вход-выход» получим в виде:
 ,
,
где 
Структурная схема тесно связана с физикой работы преобразователя и поэтому легко может быть составлена по исходным энергетическим уравнениям, а уравнения «вход-выход» представляют более абстрактную модель системы.
Можно перейти к еще более абстрактной модели — уравнениям состояния, когда система представляется стандартной структурой в виде автомата с памятью (  ).
).
Рис. 1-7а. Структурная схема динамической системы в виде непрерывного автомата.
 ;
;
 ,
,
где x — вектор состояния, A — матрица коэффициентов, B — матрица управления, C — матрица выхода, D — матрица обхода.
В этой структуре переменные состояния часто не являются физическими величинами, которые могут быть измерены в реальной системе.
Для моделирования электромеханической системы на ЭВМ или при управлении ею от ЭВМ удобно эту систему представить как дискретную по времени (импульсную), в которой ее переменные наблюдаются (вычисляются) через дискретные промежутки времени Т. При выборе Т достаточно малом по сравнению с инерционностью системы, дискретная модель достаточно точно описывает непрерывную систему.
Для анализа дискретной модели вводится аппарат дискретного преобразования Лапласа и дискретные передаточные функции D ( Z ), где Z — оператор запаздывания на интервал Т .
При достаточно малом Т можно принять  .
.
Имея передаточную функцию системы W ( P ), заменой  получим D ( Z ) в виде
получим D ( Z ) в виде
 ,
,
где Z -1 — запаздывание на один такт (время Т). Этой функции соответствует разностное уравнение «вход-выход»

Этой модели соответствует дискретный рекурсивный фильтр вида  , где А и В -полиномиальные матрицы, а Т — матрица задержек тактов.
, где А и В -полиномиальные матрицы, а Т — матрица задержек тактов.
Рис. 1-7б. Структурная схема динамической системы в виде дискретного автомата.
По схеме рекурсивного фильтра может быть восстановлен алгоритм вычисления выходной величины y ( n ) в данном такте, зная y ( n — i ) в предыдущие такты, и значения входного воздействия u ( n ) в данный такт и u ( n — i ) в предыдущие такты — прямое программирование. Применяются также последовательное и параллельное программирование, когда D ( Z ) представляется в виде произведения или суммы более простых функций.
От разностных уравнений «вход-выход» можно перейти к уравнениям пространства состояний и представить систему в виде дискретного автомата с памятью в виде .
 ;
; 
где x[n] — состояние в данный такт, x[n+1] — состояние в следующий такт.
Удобной моделью для анализа динамической системы является частотная характеристика

которая обычно представляется в виде двух характеристик, амплитудной A (ω) и фазовой f (ω).
1.7. Анализ простейшего электромеханического преобразователя.
Рассмотрим простейший магнитоэлектрический преобразователь, имеющий одну степень механической н электрической свободы, в качестве которого может быть приведен линейный исполнительный двигатель, применяемый в системе позиционирования в накопителях на жестких дисках СМ-ЭВМ.
Его динамика описывается двумя уравнениями:
Модель такого преобразователя приведена на  и
и  .
.
Обозначив  и
и  , получим эти уравнения в операторной форме:
, получим эти уравнения в операторной форме:


Перейдя к изображениям, получим следующие уравнения:
По этим уравнениям можно получить структурную схему согласно  , по которой можно получить передаточную функцию
, по которой можно получить передаточную функцию
где  ;
;  ;
; 
Рис. 1-8. Структурная схема электромеханического преобразователя.
Перейдя обратно во временную область, можно получить уравнение «вход-выход»
 , где
, где 
Для перехода к уравнениям состояния представим уравнение вход-выход в скобочной форме

Введем новые координаты, соответствующие перемещенным в квадратных скобках и получим дифференциально-алгебраическую систему (слева) и ее преобразованную форму (справа)


Этим уравнениям соответствует структура, показанная на  .
.
Рис. 1-9. Структурная схема преобразователя в пространстве состояния.
При переходе к уравнениям состояния получим x `= A · x + B · u ; h = C · x + D · u ,
где u = U ;  ;
;  ;
;  ;
;  ; D =0.
; D =0.
При достаточно малом периоде квантования Т по сравнению с инерционностью системы ее можно представить как дискретную (по времени) с дискретной передаточной функцией
Произведя необходимые преобразования, получим
где  ;
;  ; B 1 = B 2 =3· B 0 ; B 3 = B 0 .
; B 1 = B 2 =3· B 0 ; B 3 = B 0 .
Обозначим h `= h · K 0 -1 .Тогда из выражения  получим разностное уравнение «вход-выход»:
получим разностное уравнение «вход-выход»:

Этому уравнению соответствует структура рекурсивного фильтра, представленная на  .
.
Рис. 1-10а. Структурная схема преобразователя в виде рекурсивного фильтра.
Используя, например, прямое программирование, можно моделировать систему на ЭВМ, вычисляя значения выходной величины h ( n ) по шагам. Скажем, переходную функцию при ступенчатом воздействии
U ( n )= U при n >0 (см.  )
)
Рис. 1-10б. Выход преобразователя при ступенчатом воздействии.




От разностного уравнения вход-выход можно перейти к уравнениям состояния и представить систему в виде дискретного автомата с памятью
 ;
; 
- X ( n ) — вектор состояния автомата в данный дискретный момент времени,
- X ( n +1) — вектор состояния в следующий наблюдаемый момент через промежуток времени Т,
- B — матрица входного преобразования,
- A — матрица, реализующая функцию переходов,
- C — матрица, соответствующая функции выходов.
Частотная характеристика системы

В этом случае, если характеристическое уравнение имеет вещественные отрицательные корни, получим

Тогда амплитудная частотная характеристика будет (см.  )
)

Рис. 1-11. Частотная характеристика электромеханического преобразователя.
1.8. Упражнения и контрольные вопросы к главе 1.
- Перечислите основные механические аналогии, дополнив колонки 1 и 2 таблицы 1-1 размерностями представленных в них физических величин.
- Выведите уравнения динамики простейших механической и электромеханической систем из уравнений Лагранжа-Максвелла. Нарисуйте схемы, соответствующие этим уравнениям.
- Перечислите основные типы электромеханических преобразователей и приведите примеры этих преобразователей.
- Выведите передаточную функцию и нарисуйте структурную схему линейного двигателя без пружины и без трения.
- По полученной в п.4 передаточной функции выведите выражение для частотной характеристики двигателя и постройте ее, задавшись численными значениями параметров двигателя (например, Тэ=10 мс, m=50 г, Кэм=0,05 Вс).
Электромеханические аналогии
Электромеханические аналогии:
Явления, исследуемые на основе законов физики, описываются математически при помощи систем уравнений. Исходя из единства уравнений, соответствующих некоторым двум явлениям, происходящим в различных областях, например в электрической цепи и механической системе, можно установить аналогию между этими явлениями. «Единство природы обнаруживается в «поразительной аналогичности» дифференциальных уравнений, относящихся к различным областям явлений»
Благодаря единству уравнений электрических и механических систем исследование явлений в механической системе может быть заменено исследованием процессов в электрической цепи. Выполнение электрических цепей обычно сопряжено с меньшими трудностями, чем выполнение механических систем; они более компактны и, что особенно важно, измерения в них более точны и удобны. Процессы в электромеханических системах, представляющих совокупность электрических и механических устройств, также могут с успехом исследоваться с помощью электромеханических аналогий.
Механические системы с сосредоточенными параметрами, которые по аналогии с электрическими цепями будем называть механическими цепями, состоят из активных элементов (источников энергии) и пассивных элементов.
Рассмотрим идеализированные элементы простейших линейных механических цепей, совершающих поступательное или вращательное движение (комбинированное поступательно-вращательное движение опустим).
В случае поступательного движения заданная внешняя сила, приложенная к цепи, рассматривается как источник силы, а заданная скорость какой-либо точки цепи — как источник скорости.
В случае вращательного движения заданный вращающий момент, приложенный к цепи, рассматривается как источник момента, а заданная угловая скорость какой-либо точки — как источник угловой скорости .
Роль пассивных элементов в механических цепях выполняют массы, моменты инерции, пружины и механические (демпфирующие) сопротивления.
Массой называется идеализированный элемент механической цепи, обладающий инерцией. В нем накапливается кинетическая энергия. При этом термин «масса» и соответствующее ему условное обозначение т применяются для обозначения как самого инерционного элемента, так и его количественной характеристики. Сила F (ньютон — H), приложенная к центру тяжести свободного твердого тела, сообщает ему линейную скорость 
На вращение тела влияет не только масса, но и распределение ее относительно оси вращения. Поэтому вращающийся инерционный элемент характеризуется моментом инерции  — радиус инерции тела относительно оси вращения. Это пассивный элемент, в котором накапливается кинетическая энергия вращения.
— радиус инерции тела относительно оси вращения. Это пассивный элемент, в котором накапливается кинетическая энергия вращения.
Момент  приложенный к свободному твердому телу, сообщает ему угловую скорость со (рад/с) и угловое ускорение
приложенный к свободному твердому телу, сообщает ему угловую скорость со (рад/с) и угловое ускорение  Если момент инерции постоянен, то
Если момент инерции постоянен, то  (7-34)
(7-34)
т. е. момент инерции  представляет собой коэффициент пропорциональности между моментом и угловым ускорением.
представляет собой коэффициент пропорциональности между моментом и угловым ускорением.
Кинетическая энергия поступательного движения равна  а кинетическая энергия вращательного движения
а кинетическая энергия вращательного движения  (Дж).
(Дж).
Пружина играет роль пассивного элемента, в котором накапливается потенциальная энергия, Сила натяжения или давления, развиваемая соответственно растянутой или сжатой пружиной при данном относительном перемещении х (м) ее конца, пропорциональна ее жесткости К, измеряемой в 
Сила F, необходимая для относительного перемещения х конца пружины, действует вдоль оси х и равна по закону Гука:

Продифференцировав обе части уравнения, получим: 
Величина, обратная К, называется податливостью пружины. Момент, необходимый для создания углового перемещения  конца пружины, подвергающейся скручиванию, пропорционален жесткости К
конца пружины, подвергающейся скручиванию, пропорционален жесткости К 
откуда 
В этом случае коэффициент пропорциональности  называется податливостью при кручении.
называется податливостью при кручении.
Потенциальная энергия при растяжении или сжатии пружины равна  а потенциальная энергия при скручивании
а потенциальная энергия при скручивании  (Дж).
(Дж).
Демпфирующее механическое сопротивление создается вязким трением. Вследствие механического сопротивления происходит необратимый процесс преобразования кинетической энергии в тепло.
В линейной механической цепи с поступательным движением сила трения пропорциональна первой степени относительной скорости точек, принадлежащих трущимся поверхностям:

где f—коэффициент трения
При вращательном движении момент силы трения пропорционален первой степени относительной угловой скорости:

В этом случае коэффициент трения f измеряется в 

Мощность, расходуемая на трение, равна при поступательном движении  а при вращательном
а при вращательном 
Сопоставление уравнений (7-33) — (7-38) с уравнениями элементов электрических цепей 
показывает, что механическая сила и вращающий момент соответствуют напряжению, линейная и угловая скорости — юку, масса и момент инерции — индуктивности, податливость пружины — емкости, механическое сопротивление — сопротивлению,
На рис. 7-29 приведены изображения пассивных элементов механической цепи с поступательным движением  и показаны их электрические аналоги.
и показаны их электрические аналоги.
Рассмотренная система электромеханических аналогий, сведенная в табл. 7-1, не является единственной. Взяв дуальную электрическую цепь, можно заключить, что механическая сила и вращающий момент соответствуют току, линейная и угловая скорости — напряжению, Масса и момент инерции — емкости, податливость пружины — индуктивности, механическое сопротивление — проводимости.
Дифференциальные уравнения движения механической цепи могут быть выведены на основе второго закона Ньютона, который для поступательного движения гласит: если на тело действует несколько сил, то его ускорение совпадает по направлению с равнодействующей этих сил и пропорционально отношению последней к массе тела. 
Для вращательного движения применяется следующая формулировка второго закона Ньютона: если относительно оси вращения тела действует несколько моментов, то его угловое ускорение относительно той же оси пропорционально отношению результирующего момента к моменту инерции тела.
Дифференциальные уравнения движения механической цепи могут быть также получены на основании принципа Даламбера: при движении тела действующие на него силы и сила инерции удовлетворяют уравнению равновесия сил.
Уравнения такого же типа, получаемые для электрических цепей на основании законов Кирхгофа, могут быть либо уравнениями напряжений, либо уравнениями токов.
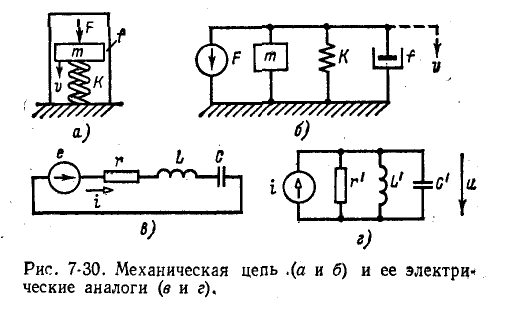
В качестве примера рассмотрим простейшую механическую систему: масса ш находится под воздействием силы F и опирается на пружину (рис, 7-30, а). Тело движется между неподвижными направляющими, и между ним и направляющими- возникает вязкое трение, Массой пружины пренебрегаем.
 Механическое сопротивление изображается в виде демпфера.
Механическое сопротивление изображается в виде демпфера.
На рис. 7-30. б изображена схема данной механической цепи. По второму закону Ньютона
Пользуясь первой системой электромеханических аналогий (сила — напряжение, табл. 7-1), получаем уравнение электрической цепи, показанной на рис. 7-30, в:
В свою очередь, применив вторую систему аналогий (сила — ток), получим уравнение электрической цепи, показанной на рис, 7-30, г:
Таким образом, можно пользоваться двумя системам» электромеханических аналогий: в одной из них напряжение, а в другой — ток являются аналогом силы или вращающего момента. Две электрические цепи, аналогичные одной и той же механической цепи, являются дуальными, так как контурные токи одной цепи соответствуют узловым напряжениям другой.
Электромеханические аналогии находят практическое применение в электрических моделях.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Индуктивно связанные электрические цепи
- Фильтры и топологические методы анализа линейных электрических цепей
- Электрическое поле и его расчёт
- Расчет неразветвленной однородной магнитной цепи
- Теорема об изменении токов в электрической цепи при изменении сопротивления в одной ветви
- Теорема об эквивалентном источнике
- Применение матриц к расчету электрических цепей
- Дуальные цепи
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://elib.spbstu.ru/dl/059/chapter1/chapter1.html
http://www.evkova.org/elektromehanicheskie-analogii