Дифференциальное уравнение колебаний.
Свободные колебания. Рассмотрим колебания груза массы m, висящего на пружине, жесткость которой. Направим ось координат Х вертикально вниз, 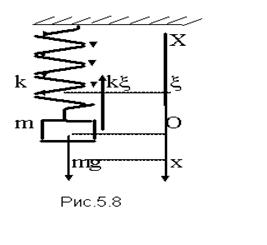
причем за начало отсчета примем точку О (рис.5.8), лежащую на одном уровне с центром масс m, когда груз неподвижен. При этом пружина растянута на величину x по сравнению с недеформированном состоянием. Величина упругой силы, действующей на массу m, равна kx. В положении равновесия
Если теперь сместить груз из положения равновесия, то он начнет совершать колебательное движение. Колебания, которые происходят в системе, выведенной из положения равновесия и затем предоставленной самой себе, называются свободными или собственными колебаниями,а частота, с которой происходят эти колебания, называется собственной частотой.Пусть в некоторый момент времени смещение груза равно х. Тогда второй закон Ньютона в проекции на ось Х может быть записан в следующем виде:
max = mg — k (x +x) или с учетом (5-13)
В свою очередь, уравнение (5-14) можно записать иначе, если представить ускорение тела через вторую производную смещения по времени ax = d 2 x/dt 2 и обозначить величину k/m =  :
:
 = — x . (5-15)
= — x . (5-15)
Уравнение (5-15) является дифференциальным уравнением второго порядка, однако его решение можно просто угадать простым перебором всех элементарных функций, из которых только функции синуса и косинуса удовлетворяют решению этого уравнения. Действительно, если
смещение x = A sin(w0t + j), (5-16)
то скорость тела  , (5-17)
, (5-17)
и ускорение тела  . (5-18)
. (5-18)
Сравнение (5-16) и (5-18) показывает, что действительно (5-16) является решением уравнения (5-15). Величины А и j остаются произвольными, для их определения необходимо использовать начальные условия, т.е. значения смещения и скорости тела в начальный момент времени. Например, если при t = 0 x (0)= 0, а v(0) = v0, то из (5-16 ) следует, что sinj = 0 и j = 0, a из (5-17) величина А = v0/w0. При этих условиях решением уравнения (5-15) служит функция х(t) =  . Задание тех или иных начальных условий обычно определяется конкретными условиями поставленной задачи.
. Задание тех или иных начальных условий обычно определяется конкретными условиями поставленной задачи.
Затухающие колебания. В реальной жизни любой колебательный процесс постепенно затухает из-за наличия сил трения. Для колебаний груза на пружине существенную роль играет так называемое вязкое трение, сила которого при малых смещениях оказывается пропорциональной величине скорости тела:
Fтрен = — bv = — b  . (5-19)
. (5-19)
В этом случае второй закон Ньютона (уравнение движения) для груза, колеблющегося на пружине, приобретает такой вид:

 + mg — k (x +x). (5-20)
+ mg — k (x +x). (5-20)
Вводя обозначения  , это уравнение можно преобразовать так:
, это уравнение можно преобразовать так:
 , (5-21)
, (5-21)
где по-прежнему  . Решение этого дифференциального уравнения может быть получено обычным способом, но можно показать, что уравнение (5-21) можно свести к уравнению типа (5-15). Для этого достаточно ввести замену переменных x(t) = z (t)e — b t . Проводя операцию дифференцирования, имеем:
. Решение этого дифференциального уравнения может быть получено обычным способом, но можно показать, что уравнение (5-21) можно свести к уравнению типа (5-15). Для этого достаточно ввести замену переменных x(t) = z (t)e — b t . Проводя операцию дифференцирования, имеем:
 ; 2b
; 2b  ;
;
 ,
,  .
.
С учетом этого уравнение (5-21) может быть записано в таком виде:
 +
+  +
+  = 0
= 0
После сокращения на величину  и приведения подобных членов получаем:
и приведения подобных членов получаем:
 . (5-22)
. (5-22)
Сравнивая полученное уравнение с выражением (5-15), нетрудно заметить их почти полную идентичность; различие состоит лишь в том, что частота колебаний в (5-22) определяется из формулы  . Таким образом решение уравнения (5-21 ) имеет вид:
. Таким образом решение уравнения (5-21 ) имеет вид:
 , (5-23)
, (5-23)
где как и ранее величины А и j определяются из начальных условий. В большинстве случаев b
 , (5-24)
, (5-24)
т.е. декремент затухания равен относительному уменьшению амплитуды за время, равное периоду колебания. Натуральный логарифм D называют логарифмическим декрементом затухания d, т.е. d = ln D = bТ.
Дата добавления: 2015-04-15 ; просмотров: 2743 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Вынужденные колебания
Определение вынужденных колебаний
Для того чтобы в реально существующей колебательной системе получать незатухающие колебания, следует каким-либо образом компенсировать потери энергии, которые происходят в результате существования сил сопротивления. Самым простым способом реализации незатухающих колебаний является воздействие на систему при помощи внешней периодической силы. Работа внешней силы обеспечить приток энергии в систему извне. Эта энергия не даст колебаниям затухнуть, при действии сил трения.
Колебания, которые возникают под действием периодически меняющейся силы (периодически изменяющейся ЭДС), называют вынужденными механическими (электромагнитными) колебаниями.
Дифференциальное уравнение вынужденных колебаний
Допустим, на механическую колебательную систему действует гармонически изменяющаяся внешняя сила:
Рассмотрим колебания груза на пружине (пружинный маятник). Уравнение незатухающих гармонических колебаний для этой системы можно записать как:
где $x$ — координата; $\delta $ — коэффициент затухания; $<\omega >_0$ — циклическая частота свободных незатухающих колебаний (если $\delta $=0, то $<\omega >_<0\ >$называют собственной частотой колебаний).
Если рассматривается, например, электрический колебательный контур, то роль периодически действующей силы может играть внешняя ЭДС или переменное напряжение. Их подводят к контуру извне и изменяются они по гармоническому закону. Уравнение колебаний в электрическом контуре можно представить как:
где $q$ — заряд; $\delta =\frac
Уравнения (2) и (3) можно свести к линейному неоднородному дифференциальному уравнению вида:
где $s$ — колеблющийся параметр; $x_0=\frac
Решением уравнения (4) является сумма общего решения однородного уравнения и частного решения неоднородного уравнения. Однородное уравнение при этом имеет вид:
Его общее решение:
где $A_0$ — начальная амплитуда колебаний.
Частное решение уравнения (4) в представлено выражением:
Слагаемое $s_1$ в решении уравнения (5) играет значительную роль в начальной стадии установления колебаний, пока амплитуда вынужденных колебаний не будет определяться выражением (8).
Установившись, вынужденные колебания происходят с частотой $\omega $ и являются гармоническими. Амплитуда и фаза этих колебаний определяются равенствами (8) и (9), и они зависят от частоты $\omega $.
Резонанс вынужденных колебаний
Если частота вынуждающей силы приближается к собственной частоте колебаний, то возникает резкое увеличение амплитуды колебаний. Такое явление называют резонансом.
Из выражения (8) видно, что амплитуда имеет максимум. Для нахождения резонансной частоты (частоты при которой $A=max$), следует найти максимум функции $A(\omega )$. Взяв производную $\frac
Равенство (10) справедливо при:
Получается, что резонансная частота ($<\omega >_r$) равна:
При $<\delta >^2\ll <\omega >^2_0$ резонансная частота совпадает с собственной частотой колебаний $<\omega >_0.$ Подставим вместо частоты правую часть выражения (11) в формулу (8), получим выражение для резонансной амплитуды вынужденных колебаний:
При небольшом затухании колебаний (если $<\delta >^2\ll <\omega >^2_0$) амплитуда при резонансе равна:
где $Q=\frac<<\omega >_0><2\delta >$ — добротность колебательной системы, величина, характеризующая резонансные свойства колебательной системы. С увеличением добротности увеличивается амплитуда резонанса.
Примеры задач с решением
Задание. Какова добротность колебательного контура, представленного на рис.1?
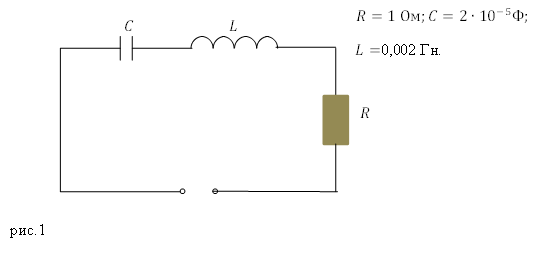
Решение. Добротность электрического колебательного контура найдем как:
При этом собственная частота колебаний в таком контуре равна:
коэффициент затухания находим как:
Подставляет правые части выражений (1.2) (1.3) вместо соответствующих величин в (1.1), в результате, добротность представленного на рис. 1 контура найдем при помощи формулы:
Ответ. $Q=10$
Задание. Пружинный маятник выполняет вынужденные колебания в вязком веществе. Масса груза на пружине равна $m$, коэффициент упругости пружины $k$. Коэффициент сопротивления среды равен $r$. Систему заставляет совершать колебания сила $F=<\cos \left(\omega t\right)(Н).\ \ \ >$Чему равна резонансная амплитуда заданных колебаний ($A_r$)?
Решение. Допустим, что груз совершает колебания вдоль прямой X, тогда уравнением данных механических колебаний будет выражение:
где коэффициент затухания равен $\delta =\frac
мы видим, что амплитуда силы равна единице:
Собственная частота колебаний груза на пружине:
Амплитуда при резонансе таких колебаний равна:
Дифференциальные уравнения колебаний
 — гармонические,
— гармонические,
 — затухающие,
— затухающие,
 — вынужденные.
— вынужденные.
· Уравнение колебания, полученного при сложении двух колебаний одинаковой частоты и одного направления, амплитуды колебаний которых  и
и  , а начальные фазы
, а начальные фазы  и
и  ,
,
 , где
, где
 —
—
амплитуда результирующего колебания,  — разность фаз слагаемых колебаний; начальная фаза результирующего колебания определяется формулой
— разность фаз слагаемых колебаний; начальная фаза результирующего колебания определяется формулой
 .
.
· Уравнение траектории точки, участвующей в двух взаимно перпендикулярных колебаниях с одинаковыми частотами
 :
:
а) если  , то
, то  — уравнение прямой,
— уравнение прямой,
б) если  , то
, то  — уравнение прямой,
— уравнение прямой,
в) если  , то
, то  — уравнение эллипса, приведённого к осям,
— уравнение эллипса, приведённого к осям,
г) если  и
и  , то
, то  — уравнение окружности, где
— уравнение окружности, где  — радиус окружности.
— радиус окружности.
МЕХАНИЧЕСКИЕ ВОЛНЫ
· Длина волны, т.е расстояние между ближайшими частицами, колеблющимися в одинаковой фазе
 ,
,
где  — скорость волны,
— скорость волны,  — период,
— период,  — частота.
— частота.
· Уравнение бегущей волны, распространяющейся вдоль положительного направления оси  в среде, не поглощающей энергию,
в среде, не поглощающей энергию,
 или
или
 , где
, где
 — амплитуда волны,
— амплитуда волны,  — циклическая частота,
— циклическая частота,  -фаза волны,
-фаза волны,  — начальная фаза,
— начальная фаза,  — волновое число.
— волновое число.
Волна называется продольной, если колебания частиц среды происходят в направлении распространения волны. Волна называется поперечной, если частицы колеблются в плоскостях, перпендикулярных направлению распространения волны.
Поперечные волны могут возникать только в такой среде, которая обладает упругостью формы, т.е. способна сопротивляться деформации сдвига. Этим свойством обладают только твердые тела. Продольные волны могут распространяться как в твердых телах, так и в жидких и газообразных средах.

Маятник
В физике под маятником понимают твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной точки или оси. Принято различать математический и физический маятники.
Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке. Достаточно хорошим приближением к математическому маятнику служит небольшой тяжелый шарик, подвешенный на длинной тонкой нити.
Отклонение маятника от положения равновесия будем характеризовать углом  образованным нитью с вертикалью (рис. 54.1). При отклонении маятника от положения равновесия возникает вращательный момент N, равный по величине
образованным нитью с вертикалью (рис. 54.1). При отклонении маятника от положения равновесия возникает вращательный момент N, равный по величине  — масса, a l — длина маятника). Он имеет такое направление, что стремится вернуть маятник в положение равновесия, и аналогичен в этом отношении квазиупругой силе. Поэтому так же, как смещению и квазиупругой силе, моменту N и угловому смещению
— масса, a l — длина маятника). Он имеет такое направление, что стремится вернуть маятник в положение равновесия, и аналогичен в этом отношении квазиупругой силе. Поэтому так же, как смещению и квазиупругой силе, моменту N и угловому смещению  нужно приписывать противоположные знаки 1). Следовательно, выражение для вращательного момента имеет вид
нужно приписывать противоположные знаки 1). Следовательно, выражение для вращательного момента имеет вид

Напишем для маятника уравнение динамики вращательного движения. Обозначив угловое ускорение через  и учитывая, что момент инерции маятника равен
и учитывая, что момент инерции маятника равен  получаем:
получаем:

Последнее уравнение можно привести к виду
 (54.2)
(54.2)

Ограничимся рассмотрением малых колебаний. В этом случае можно положить  Введя, кроме того, обозначение
Введя, кроме того, обозначение

придем к уравнению
к зторое идентично с уравнением (53.1). Его решение имеет вид

Следовательно, при малых колебаниях угловое отклонение математического маятника изменяется со временем по гармоническому закону.
Как следует из (54.3), частота колебаний математического маятника зависит только от длины маятника и от ускорения силы тяжести и не зависит от массы маятника. По формуле (53.8) с учетом (54.3) получается известное из школьного курса выражение для периода колебаний математического маятника:
Отметим, что, решив уравнение (54.2), можно найти для периода колебаний следующую формулу:

где а — амплитуда колебаний, т. е. наибольший угол, на который отклоняется маятник из положения равновесия.
Если колеблющееся тело нельзя представить как материальную точку, маятник называется физическим. При отклонении маятника от положения равновесия на угол  возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен
возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен

где m — масса маятника, а l — расстояние между точкой подвеса О и центром масс С маятника (рис. 54.2). Знак «—» имеет то же значение, что и в случае формулы (54.1).
Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, буквой I, можно написать:

В случае малых колебаний (54.8) переходит в уже известное нам уравнение:

Через  обозначена в данном случае следующая величина:
обозначена в данном случае следующая величина:
 (54.10)
(54.10)
Из уравнений (54.9) и (54.10) следует, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно оси вращения и расстояния между осью вращения и центром масс маятника. В соответствии с (54.10) период колебаний физического маятника определяется выражением
 (54.11)
(54.11)
Из сопоставления формул (54.6) и (54.11) получается, что математический маятник с длиной
 (54.12)
(54.12)
будет иметь такой период колебаний, как и данный физический маятник. Величину (54.12) называют приведенной длиной физического маятника. Таким образом, приведенная длина физического маятника — это длина такого математического маятника, период колебании которого совпадает с периодом данного физического маятника.
Точка на прямой, соединяющей точку подвеса с центром масс, лежащая на расстоянии приведенной длины от оси вращения, называется центром качания физического маятника (см.точку О на рис. 54.2).
Можно показать (рекомендуем это сделать в порядке упражнения), что при подвешивании маятника в центре качания О приведенная длина, а значит, и период колебаний будут теми же, что и вначале. Следовательно, точка подвеса и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится нозым центром качания.
На этом свойстве основано определение ускорения свободного падения с помощью так называемого оборотного маятника. Оборотным называется такой маятник, у которого имеются две параллельные друг другу, закрепленные вблизи его концов опорные призмы, за которые он может поочередно подвешиваться. Вдоль маятника могут перемещаться и закрепляться на нем тяжелые грузы. Перемещением грузов добиваются того, чтобы при подвешивании маятника за любую из призм период колебаний был одинаков. Тогда расстояние между опорными ребрами призм будет равно  Измерив период колебаний маятника и зная
Измерив период колебаний маятника и зная  можно по формуле
можно по формуле
найти ускорение свободного падения  .
.
http://www.webmath.ru/poleznoe/fizika/fizika_42_vynuzhdennye_kolebanija.php
http://poisk-ru.ru/s20084t5.html