Решение задач физики и техники с применением интеграла
п.1. От ускорения к скорости и координате
Рассматривая применение производной в физике и технике (см. §51 данного справочника), мы во второй производной от уравнения прямолинейного равномерного движения \(x(t)\) пришли к постоянному ускорению \(a=const\).
С помощью интегрирования можно пройти обратный путь.
Начнем с постоянного ускорения \(a=const\).
Интеграл от ускорения по времени – это скорость: $$ v(t)=\int adt=a\int dt=at+C $$ Физический смысл постоянной интегрирования \(C\) в этом случае – начальная скорость \(v_0\). Получаем: $$ v(t)=at+v_0 $$ Интеграл от скорости по времени – это координата: $$ x(t)=\int v(t)dt=\int (at+v_0)dt=\frac
п.2. Физические величины как интегралы других величин
Если \(v(t)\) — скорость некоторого физического процесса, уравнение этого процесса можно найти интегрированием: $$ f(t)=\int v(t)dt $$ Такие величины часто встречаются в различных разделах физики и техники.
Скорость \(v(t)=\int a(t)dt\)
Координата \(x(t)=\int v(t)dt\)
Угловое ускорение \(\beta(t)\)
Угловая скорость \(\omega(t)=\int \beta(t) dt\)
Угловая скорость \(\omega(t)\)
Угол поворота \(\varphi(t)=\int\omega(t)dt\)
Скорость расходования горючего \(u(t)\)
Масса горючего ракеты \(m(t)=\int u(t)dt\)
Заряд \(q(t)=\int I(t)dt\)
Работа \(A(t)=\int N(t)dt\)
ЭДС индукции \(\varepsilon(t)\)
Магнитный поток \(Ф(t)=-\int\varepsilon(t)dt\)
Скорость радиоактивного распада \(I(t)\)
Число атомов радиоактивного вещества \(N(t)=\int I(t)dt\)
Берутся интегралы и по другим переменным. Например, чтобы найти работу переменной силы \(F(x)\), нужно взять интеграл по координате: $$ A=\int_
При решении уравнений в частных производных интегралы берутся и по времени и по координатам.
В современной физике интеграл по времени берётся также и от самого уравнение движения. Полученная скалярная величина называется действием и носит фундаментальный характер. В простейшем случае: $$ S_0=\int \overrightarrow
\cdot \overrightarrow
\cdot \overrightarrow
п.3. Примеры
Пример 1. Тело движется со скоростью \(v(t)\) (м/с). Найдите путь, пройденный за промежуток времени от \(t_1\) до \(t_2\) (с):
a) \(v(t)=3t+2t^2,\ t_1=0,\ t_2=6\)
Путь: \begin
б) \(v(t)=2(t+2)^<5/2>,\ t_1=0,\ t_2=7\) \begin
Пример 2. . Сила тока в проводнике изменяется по закону \(I(t)=e^<-t>+2t\) (время в секундах, ток в амперах). Какой заряд пройдет через поперечное сечение проводника за время от второй до шестой секунды?
Заряд: \begin
Пример 3*. Найдите путь, который пройдет тело от начала движения до возвращения в исходную точку, если его скорость \(v(t)=18t-9t^2\) (время в секундах, скорость в м/с). Движение тела прямолинейное.
Если тело вернулось в исходную точку, оно меняло направление движения.
В момент разворота скорость равна нулю. Решаем уравнение: $$ 18t-9t^2=0\Rightarrow 9t(2-t)=0\Rightarrow \left[ \begin
 | Уравнение движения: $$ x(t)=\int(18t-9t^2)dt=9t^2-3t^3+C $$ В начальный момент времени \(x_0=0\Rightarrow C=0\) $$ x(t)=9t^2-3t^3 $$ В точке C(2;12) кривая \(x(t)\) имеет максимум. Тело двигалось в течение 2 с в одну сторону и прошло 12 м, а затем за 1 с вернулось обратно. |
Общий путь: 12+12 = 24 м.
Пример 4*. Найдите работу, которую необходимо совершить, чтобы выкачать воду из полусферического котла радиуса R м.

Найдем работу \(dA\), которую нужно совершить, чтобы выкачать слой воды толщиной \(dH\) с глубины \(H\).
Радиус слоя на глубине \(H:\ r^2=R^2-H^2\) — по теореме Пифагора.
Объем слоя воды: \(dV=\pi r^2 dH=\pi(R^2-H^2)dH\)
Масса слоя воды: \(dm=\rho dV=\pi\rho(R^2-H^2)dH\)
Работа по подъему слоя на высоту \(H\): $$ dA=dm\cdot gH=\pi\rho gH(R^2-H^2)dH $$ Получаем интеграл: \begin
Пример 5*. Какую работу выполняют при запуске ракеты массой m кг с поверхности планеты на высоту h м, если радиус планеты равен R м и масса планеты равна M кг?
Сравните работу при запуске ракеты с Земли и Луны на высоту одного радиуса небесного тела, если ускорение свободного падения на поверхности Луны \(g_M=1,62\) м/с 2 , радиус Луны \(R_M=1737\) км; для Земли соответственно \(g_E=9,81\) м/с 2 \(R_E=6371\) км.
Ускорение свободного падения на поверхности планеты: \(g_0=G\frac
Ускорение свободного падения при подъеме на высоту x: \begin
Интегрирование уравнений движения
Симуляция физики делает небольшие предсказания на основании законов физики. Эти предсказания на самом деле достаточно просты, что-то вроде «если объект вот здесь и он движется с такой скоростью в этом направлении, то за краткий промежуток времени он окажется вот тут». Мы создаём такие предсказания с помощью математической техники под названием интегрирование.
Темой этой статьи как раз и будет реализация такого интегрирования.
Интегрирование уравнений движения
Вы можете помнить из курса старшей школы или вуза, что сила равна произведению массы на ускорение.

Преобразуем это уравнение и увидим, что ускорение равно силе, делённой на массу. Это соответствует нашим интуитивным ожиданиям, потому что тяжёлые объекты труднее бросать.

Ускорение — это темп изменения скорости от времени:

Аналогично, скорость — это темп изменения позиции от времени:

Это значит, что если мы знаем текущие позицию и скорость объекта, а также приложенные к нему силы, то сможем проинтегрировать, чтобы найти его позицию и скорость в определённый момент времени.
Численное интегрирование
Если вы не изучали дифференциальные уравнения в вузе, то можете вздохнуть спокойно — вы почти в такой же ситуации, что и те, кто их изучал, потому что мы не будем решать дифференциальные уравнения аналитически. Вместо этого мы будем искать решение численным интегрированием.
Вот как работает численное интегрирование: во-первых, начнём с исходной позиции и скорости, затем сделаем небольшой шаг вперёд, чтобы найти скорость и позицию в будущем. Затем повторим это, двигаясь вперёд небольшими шагами, используя результат предыдущих вычислений как исходную точку следующих.
Но как нам найти изменение скорости и позиции на каждом шаге?
Ответ лежит в уравнениях движения.
Давайте назовём наше текущее время t, а шаг времени dt или «delta time».
Теперь мы можем представить уравнения движения в понятном всем виде:
Интуитивно это понятно: если вы находитесь в автомобиле, движущемся со скоростью 60 км/ч, то за один час вы проедете 60 км. Аналогично, автомобиль, ускоряющийся на 10 км/ч в секунду, через 10 секунд будет двигаться на 100 км/ч быстрее.
Разумеется, эта логика сохраняется, только когда ускорение и скорость постоянны. Но даже если они меняются, то это для начала вполне неплохая аппроксимация.
Давайте представим это в коде. Начнём с стационарного объекта массой один килограмм и приложим к нему постоянную силу в 10 кН (килоньютонов) и сделаем шаг вперёд, принимая, что один временной шаг равен одной секунде:
Вот каким будет результат:
Как вы видите, на каждом шаге мы знаем и позицию, и скорость объекта. Это и есть численное интегрирование.
Явный метод Эйлера
Вид интегрирования, который мы только что использовали, называется явным методом Эйлера.
Он назван в честь швейцарского математика Леонарда Эйлера, впервые открывшего эту технику.
Интегрирование Эйлера — это простейшая техника численного интегрирования. Она точна на 100% только когда темп изменений в течение шага времени постоянен.
Поскольку в примере выше ускорение постоянно, интегрирование скорости выполняется без ошибок. Однако мы ещё интегрируем и скорость для получения позиции, а скорость увеличивается из-за ускорения. Это значит, что в проинтегрированной позиции возникает ошибка.
Но насколько велика эта ошибка? Давайте выясним!
Существует аналитическое решение движения объекта при постоянном ускорении. Мы можем использовать его, чтобы сравнить численно интегрированную позицию с точным результатом:
Через 10 секунд объект должен был переместиться на 500 метров, но явным метод Эйлера даёт нам результат 450. То есть погрешность в целых 50 метров всего за 10 секунд!
Кажется, что это невероятно плохо, но в играх обычно для шага физики берётся не такой большой временной интервал. На самом деле, физика обычно вычисляется с частотой, примерно равной частоте кадров дисплея.
Если задать шаг dt = 1 ⁄100, то мы получим гораздо лучший результат:
Как вы видите, это достаточно хороший результат, определённо вполне достаточный для игры.
Почему явный метод Эйлера не (всегда) так уж хорош
С достаточно малым шагом времени явный метод Эйлера при постоянном ускорении даёт вполне достойные результаты, но что будет, если ускорение не постоянно?
Хорошим примером переменного ускорения является система пружинного амортизатора.
В этой системе масса присоединена к пружине, и её движение гасится чем-то вроде трения. Существует сила, пропорциональная расстоянию до объекта, которая притягивает его к исходной точке, и сила, пропорциональная скорости объекта, но направленная в противоположном направлении, которая замедляет его.
Здесь ускорение в течение шага времени совершенно точно изменяется, но эта постоянно меняющаяся функция является сочетанием позиции и скорости, которые сами постоянно изменяются за шаг времени.
Вот пример гармонического осциллятора с затуханием. Это хорошо изученная задача, и для него существует аналитическое решение, которое можно использовать для проверки результата численного интегрирования.
Давайте начнём со слабозатухающей системы, в которой масса колеблется рядом с исходной точкой, постепенно замедляясь.
Вот входные параметры системы масса-пружина:
- Масса: 1 килограмм
- Исходная позиция: 1000 метров от исходной точки
- Коэффициент упругости по закону Гука: k = 15
- Коэффициент затухания по закону Гука: b = 0.1
И вот график точного решения:

Если для интегрирования этой системы мы применим явный метод Эйлера, то получим следующий результа, который я отмасштабировал по вертикали:
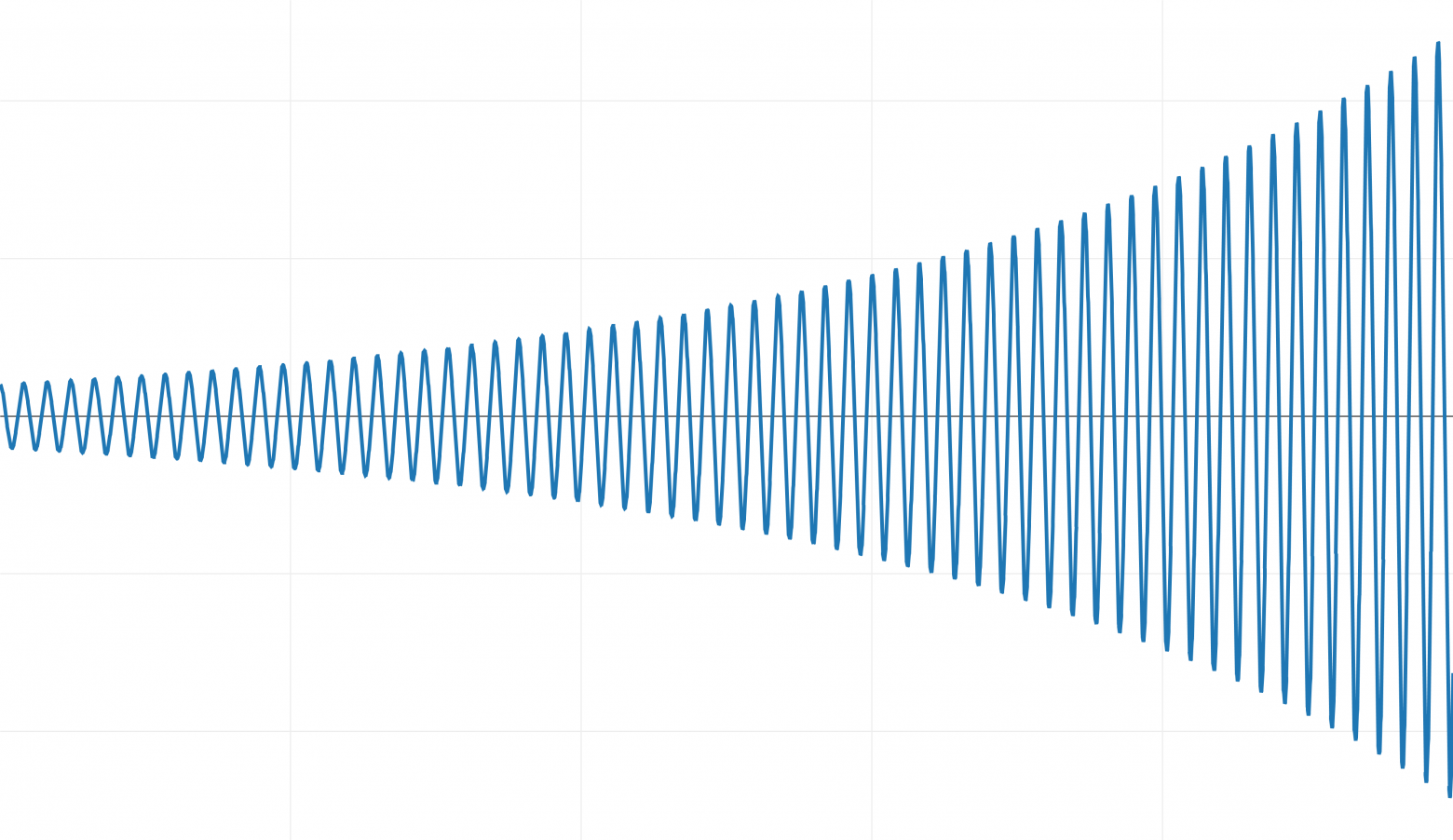
Вместо затухания и сближения с исходной точкой, система со временем набирает энергию!
При интегрировании явным методом Эйлера и с dt= 1 ⁄100 такая система нестабильна.
К сожалению, поскольку мы уже интегрируем с малым шагом времени, то не имеем практичных способов повышения точности. Даже если мы уменьшим шаг времени, то всегда будет коэффициент упругости k, при котором мы получим такое поведение.
Симплектический метод Эйлера
Мы можем рассмотреть ещё один интегратор — симплектический метод Эйлера.
В большинстве коммерческих игровых физических движков используется этот интегратор.
Переход от явного к симплектическому методу Эйлера заключается только в замене:
Использование симплектического интегратора Эйлера при dt = 1 ⁄100 для системы пружинного амортизатора даёт стабильный результат, очень близкий к точному решению:
Даже несмотря на то, что симплектический метод Эйлера имеет ту же степень точности, что и явный метод (степень 1), при интегрировании уравнений движения мы получаем намного лучший результат, потому что оно является симплектическим.
Существует множество других методов интегрирования
И теперь нечто совершенно другое.
Неявный метод Эйлера — это способ интегрирования, хорошо подходящий для интегрирования жёстких уравнений, которые при других методах становятся нестабильными. Его недостаток заключается в том, что он требует решения системы уравнений на каждом шаге времени.
Интегрирование Верле обеспечивает бо́льшую точность, чем неявный метод Эйлера, и требует меньше памяти при симуляции большого числа частиц. Это интегратор второй степени, который тоже является симплектическим.
Существует целое семейство интеграторов, называемое методами Рунге-Кутты. На самом деле, явный метод Эйлера считается частью этого семейства, но в него входят интеграторы и более высокого порядка, самым классическим из которых является метод Рунге-Кутты порядка 4 (Runge Kutta order 4) или просто RK4.
Это семейство интеграторов названо в честь открывших их немецких физиков: Карла Рунге и Мартина Кутты.
RK4 — это интегратор четвёртого порядка, то есть накапливаемая ошибка имеет порядок четвёртой производной. Это делает метод очень точным, гораздо более точным, чем явный и неявный методы Эйлера, имеющие только первый порядок.
Но хотя он более точен, нельзя сказать, что RK4 автоматически становится «лучшим» интегратором, или даже что он лучше симплектического метода Эйлера. Всё гораздо сложнее. Тем не менее, это довольно интересный интегратор и его стоит изучить.
Реализация RK4
Существует уже много объяснений математики, используемой в RK4. Например: здесь, здесь и здесь. Я настоятельно рекомендую изучить его выведение и понять, как и почему он работает на математическом уровне. Но я понимаю, что целевая аудитория этой статьи — программисты, а не математики, поэтому мы здесь будем рассматривать только реализацию. Так что давайте приступим.
Прежде чем приступить, давайте зададим состояние объекта как struct в C++, чтобы можно было удобно хранить позицию и скорость в одном месте:
Также нам нужна структура для хранения производных значений состояний:
Теперь нам нужна функция для вычисления состояния физики из t в t+dt с помощью одного набора производных, а после этого для вычисления производных в новом состоянии:
Функция ускорения управляет всей симуляцией. Давайте используем её в системе пружинного амортизатора и вернём ускорение для единичной массы:
То, что нужно здесь записать, разумеется, зависит от симуляции, но необходимо структурировать симуляцию таким образом, чтобы можно было вычислять ускорение внутри этого метода для заданных состояния и времени, в противном случае он не подойдёт для интегратора RK4.
Наконец, мы получаем саму процедуру интегрирования:
Интегратор RK4 делает выборку производной в четырёх точках, чтобы определить кривизну. Заметьте, как производная a используется при вычислении b, b используется при вычислении c, и c для d. Эта передача текущей производной в вычисление следующей и даёт интегратору RK4 его точность.
Важно то, что каждая из этих производных a, b, c и d будет разной, когда темп изменения в этих величинах является функцией времени или функцией самого состояния. Например, в нашей системе пружинного амортизатора ускорение является функцией текущей позиции и скорости, которые меняются в шаге времени.
После вычисления четырёх производных наилучшая общая производная вычисляется как взвешенная сумма, полученная из разложения в ряд Тейлора. Эта комбинированная производная используется для перемещения позиции и скорости вперёд во времени, точно так же, как мы делали это в явном интеграторе Эйлера.
Сравнение симплектического метода Эйлера и RK4
Давайте подвергнем проверке интегратор RK4.
Очевидно, что поскольку он является интегратором более высокого порядка (четвёртый против первого) он наглядно будет более точен, чем симплектический метод Эйлера, правда?
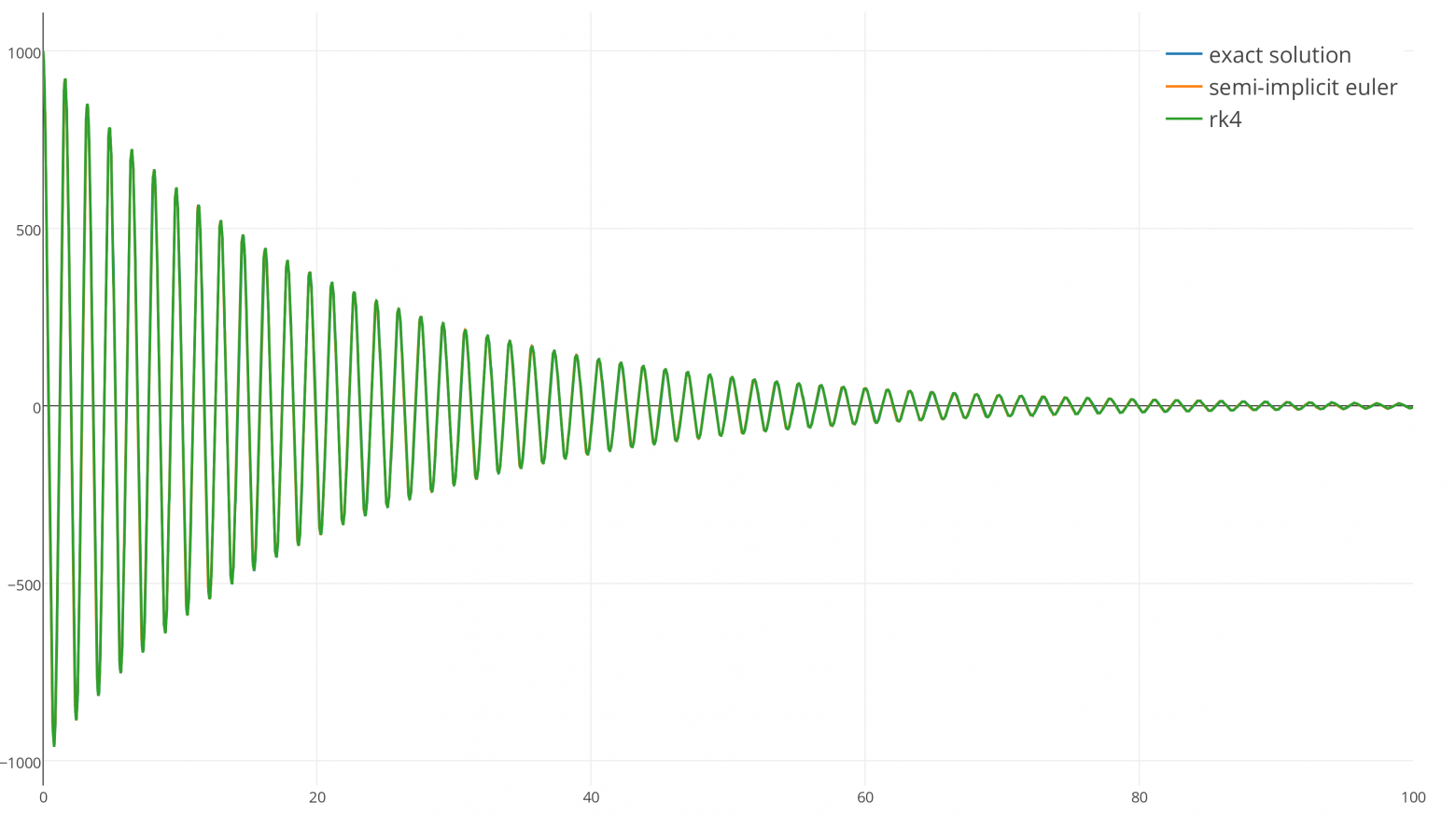
Неправда. Оба интегратора так близки к точному результату, что при таком масштабе почти невозможно найти между ними разницу. Оба интегратора стабильны и очень хорошо повторяют точное решение при dt= 1 ⁄100.
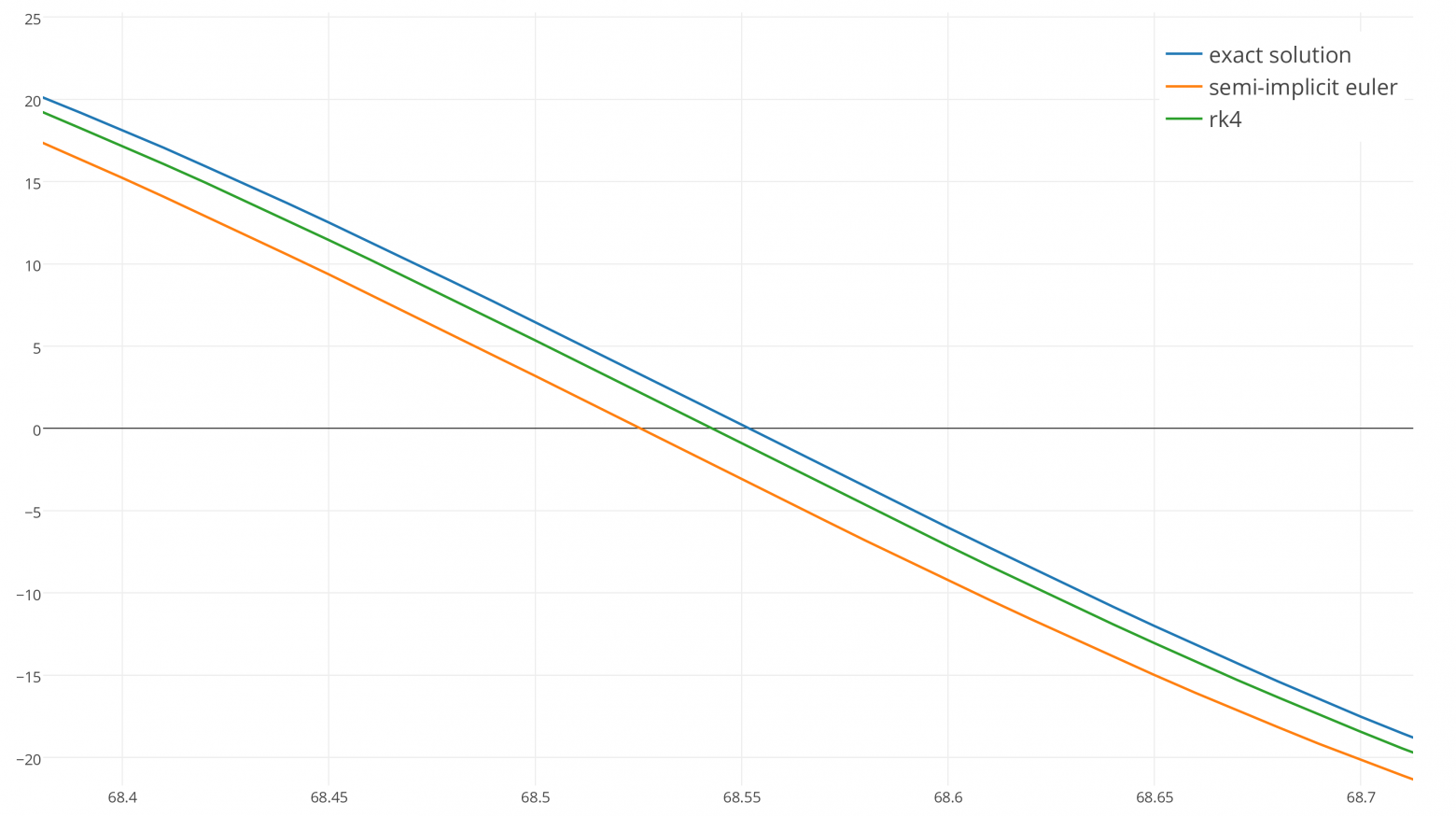
При увеличении видно, что RK4 действительно более точен, чем симплектический метод Эйлера, но стоит ли эта точность сложности и лишнего времени выполнения RK4? Трудно судить.
Давайте постараемся и посмотрим, сможем ли мы найти значительное различие между двумя интеграторами. К сожалению, мы не сможем долго наблюдать за этой системой, потому что она быстро затухает до нуля, поэтому давайте перейдём к простому гармоническому осциллятору, который колеблется бесконечно и без затуханий.
Вот точный результат, к которому мы будем стремиться:

Чтобы усложнить интеграторам задачу, давайте увеличим шаг времени до 0,1 секунды.
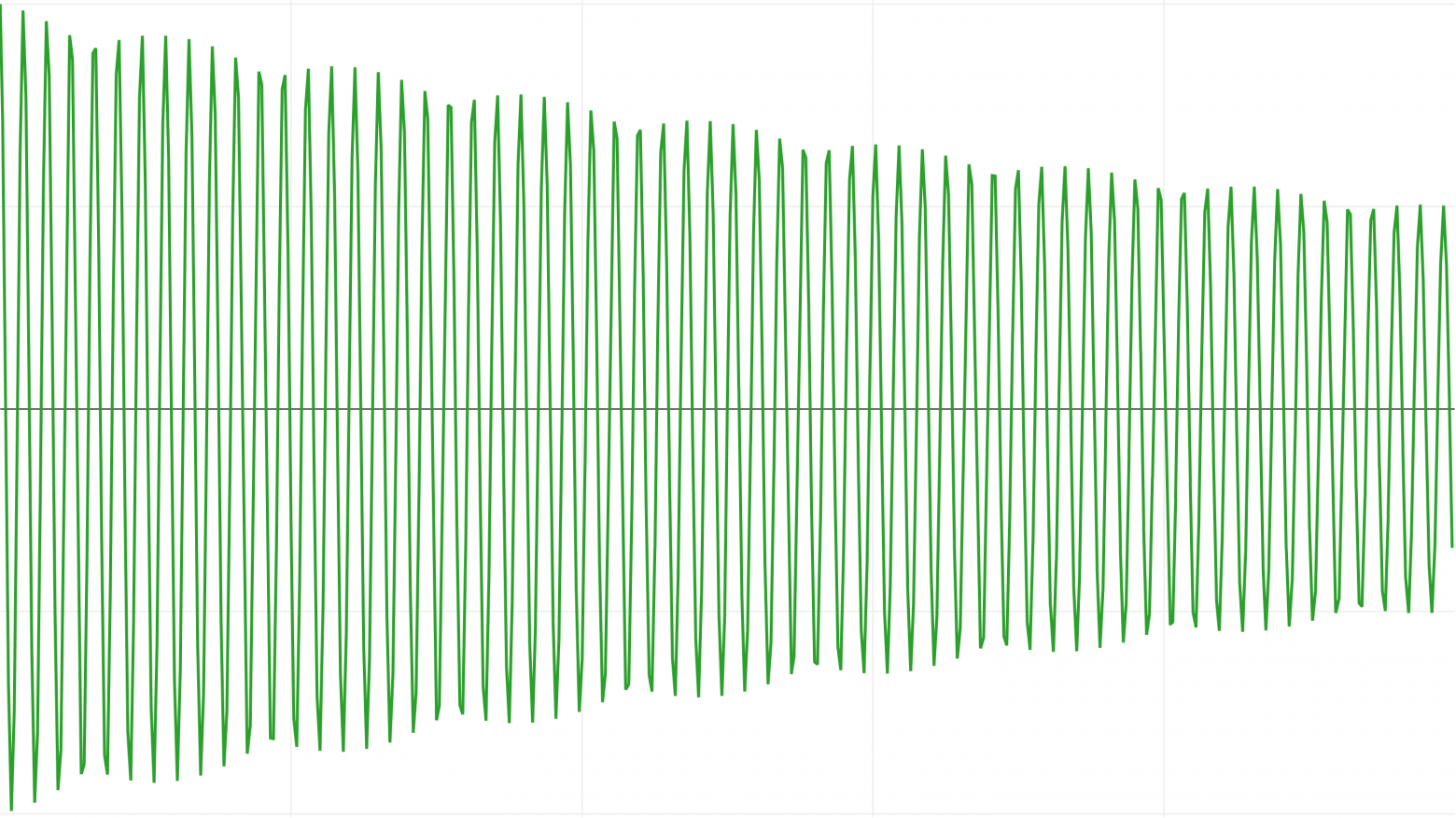
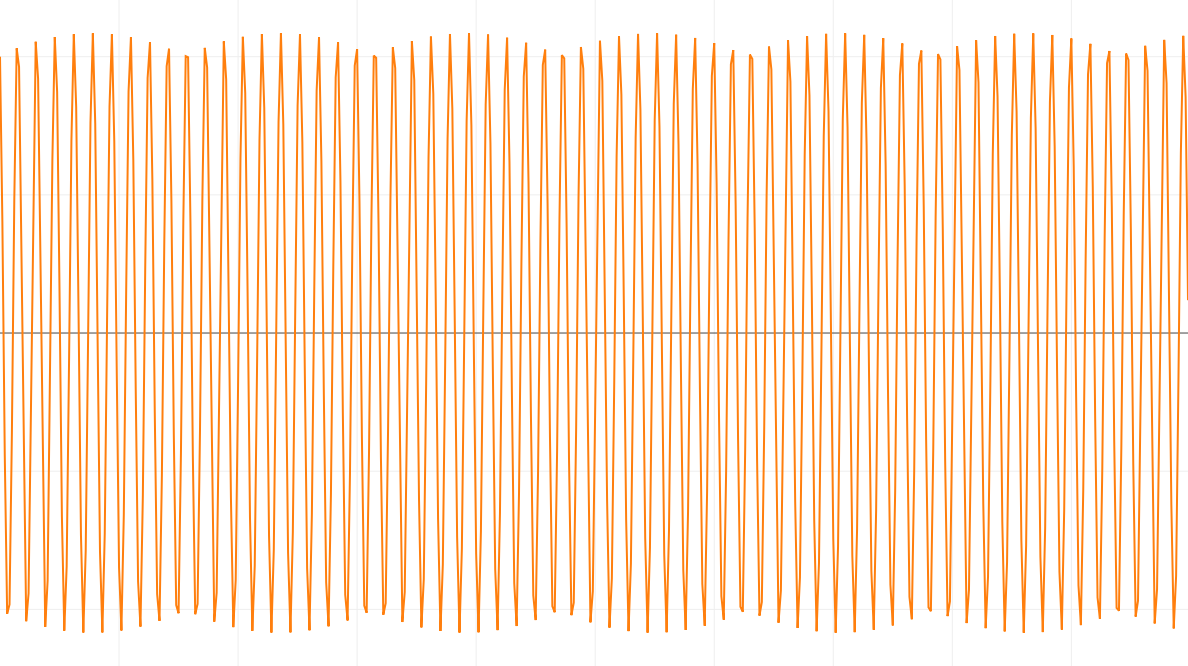
Теперь запустим интеграторы на 90 секунд и увеличим масштаб:
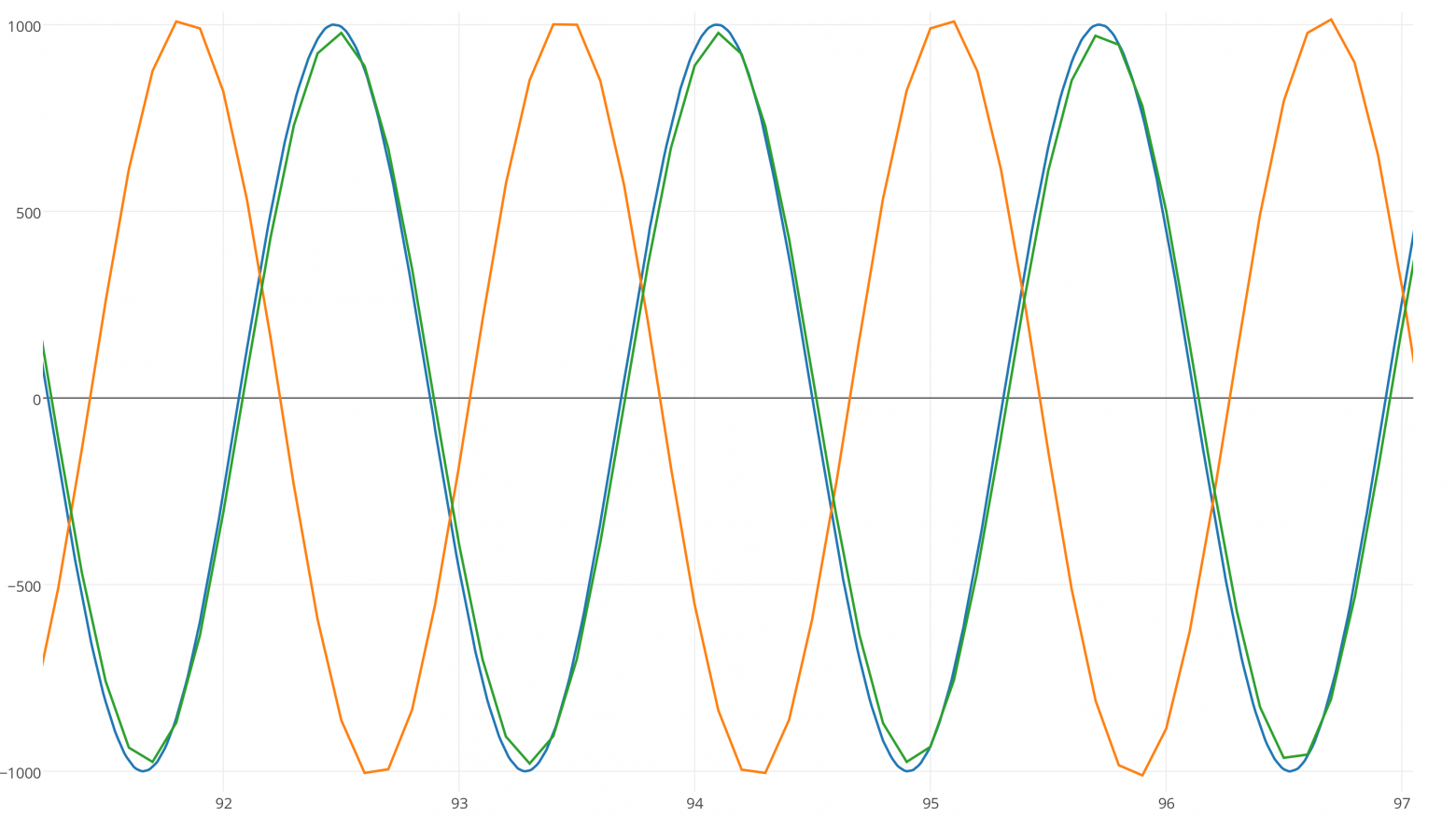
Через 90 секунд симплектический метод Эйлера (оранжевая кривая) сдвинулся по фазе относительно точного решения, потому что его частота немного отличалась, в то время как зелёная кривая RK4 соответствует частоте, но теряет энергию!
Мы чётко можем это заметить, увеличив шаг времени до 0,25 секунды.
RK4 сохраняет верную частоту, но теряет энергию:
А симплектический метод Эйлера в среднем намного лучше сохраняет энергию:
Но от сдвигается от фазы. Какой интересный результат! Как вы видите, если RK4 имеет более высокий порядок точности, то он не обязательно «лучше». В этом вопросе есть множество нюансов.
Заключение
Мы реализовали три различных интегратора и сравнили результаты.
- Явный метод Эйлера
- Симплектический метод Эйлера
- Метод Рунге-Кутты порядка 4 (RK4)
Так какой же интегратор стоит использовать в игре?
Я рекомендую симплектический метод Эйлера. Он «дёшев» и прост в реализации, гораздо стабильнее явного метода Эйлера и в среднем стремится к сохранению энергии даже при близких к предельным условиях.
Если вам действительно нужна бОльшая точность, чем у симплектического метода Эйлера, я рекомендую посмотреть на симплектические интеграторы более высокого порядка, рассчитанные на гамильтоновы системы. Таким образом вы изучите более современные техники интегрирования высокого порядка, которые лучше подходят для симуляций, чем RK4.
И наконец, если вы всё ещё пишете в игре такое:
То потратьте секунду и замените эти строки на:
Уравнения Максвелла — формулы и физический смысл
Основная идея
Если в замкнутом контуре меняется магнитный поток, то по нему течёт электрический ток. В итоге возникает электродвижущая сила магнитной индукции. Происходит это из-за изменения магнитного поля. Предположим, имеется магнит, у которого поток с течением времени увеличивается. Если в поле поместить замкнутый проводник кольцевого типа, то по правилу Ленца в нём возникнет индукционный ток, противоположный магнитной силе через контур.
Ток — это направленное движение заряженных частиц. Сила, заставляющая их перемещаться, называется электрическим полем. Появляется она при изменении магнитного потока. Отсюда можно сделать вывод, что электрическое поле существует всегда там, где есть изменяющееся магнитное, при этом оно имеет замкнутую форму. Этот вид силы и называли вихревым полем. Когда вектор магнитной силы возрастает, то увеличивается и вихревое поле, а если убывает, то, соответственно, оно уменьшается.
Джеймс Клерк Максвелл предположил, что если меняющееся магнитное поле порождает электрическое, то этот процесс может быть и обратным. Его идея заключалась в том, что если имеется проводник с током, то вокруг него существует стационарное магнитное поле. На длине этого проводника он выбрал произвольные три точки равноудалённые от него на расстояние r.
В этих точках поле будет одинаковое. Максвелл предположил, что если проводник разорвать, то для того чтобы ток продолжал движение, нужно сохранить заряды. То есть фактически использовать конденсатор. По мнению Максвелла, тогда в точке разрыва поле будет такое же, как и вокруг проводника. Между обкладками возникнет электрическая сила, так как на них происходит сохранение (накопление) зарядов. Учитывая это, физик пришёл к выводу, что изменяющееся электрическое поле приводит к возникновению магнитного потока.
Так как на обкладках имеется заряд, то сила тока будет равняться I = dq / dt. Заряд можно связать с напряжением на обкладках конденсатора и электроёмкостью: q = C * U. Ёмкость же в вакууме определяется как E0 * S/ d, а напряжение — как E * d.
Подставив значения в формулу, Максвелл получил выражение: dq / dt = E0 * S * dE / dt. Так как ток между обкладками не течёт, а перенос происходит полем, физик предложил ввести понятие фиктивный ток смещения. Плотность этого тока можно найти по формуле: j = E0 * dE / dt. Это позволило упростить вычисления магнитной силы. Ток смещения и вихревое поле стали основой для создания системы уравнений.
Физическая суть
Электромагнитное поле представляет собой материю, с помощью которой заряженные элементарные частицы взаимодействуют между собой. В вакууме явление характеризуется напряжённостью E и магнитной индукцией B. Эти параметры определяют силы, воздействующие на подвижные и неподвижные заряды. Кроме них, значение электромагнитного поля определяется скалярным и векторным потенциалами и двумя дополнительными величинами: индукцией D и напряжённостью магнитных линий H.

Открытие в 1831 году Фарадеем закона электромагнитной индукции, устанавливающего зависимость между зарядом и намагниченностью у токоведущих тел, помогло Максвеллу сформулировать ряд уравнений, после названных его именем. Главное его исследование заключалось в исследовании тока смещения, равного по магнитному действию электрическому току.
Сформулировав свою систему, физик смог связать электрическое и магнитное поле с зарядом и током. Физический смысл уравнений Максвелла заключается в том, что электромагнитное поле рассматривалось им как самостоятельный объект, в котором передача энергии происходит колебанием от точки к точке с конечной скоростью. При этом в вакууме она определяется скоростью света.
С точки зрения математики, для описания процессов учёный использовал векторный анализ, выраженный через инвариантную форму, использующую кватернионы Гамильтона. Написанные им уравнения неохотно принимались учёным советом Лондонского Королевского общества. Это происходило из-за того, что они не были похожи ни на одно из описаний известных ранее.
Тем не менее система Максвелла получила признание и стала фундаментальной в области электродинамики. При этом её справедливость получила подтверждение не только в микромире, ни и в области квантовой физики.
Основным следствием открытия стало понятие о скорости распространения электромагнитных волн и создании теории света. По сути, эта система теории волн в науке об электромагнетизме играет роль сопоставимую с законами Ньютона в области механики или с теоремами в электродинамике.
Дифференциальная запись
Открытие в проводящих телах тока смещения позволило Максвеллу вывести четыре уравнения, на основе которых была создана теория электромагнитных явлений. Обычно в физике математическая запись процессов не зависит от системы единиц, но в термодинамике это не так. Всё дело в том, что при записи в различных системах изменяются коэффициенты (постоянные).

Например, в системе единиц, используемой в описании квантовой теории поля, скорость света и электромагнитная константа равна единице. Поэтому уравнения не будут иметь ни одной постоянной. Для записи используют две системы: СГС — симметричная гауссова, и СИ — Международная система единиц.
В этих двух стандартах система уравнений Максвелла может быть описана словесно и математически следующим образом:
- В качестве источника электрической индукции выступает заряженная частица. В СГС: ∇ * D = 4*p* ρ; в СИ: ∇ * D = 4* ρ.
- В электромагнитном поле магнитных зарядов нет. В обеих системах формула выглядит одинакового: ∇ * B = 0.
- При изменении величины магнитной индукции возникает электрическое вихревое поле. В СГС: ∇ * E = — δ B / c * δ t; в СИ: ∇ * E = — δ B / δ t.
- Вихревое магнитное поле появляется из-за изменений электрической индукции и тока. В СГС: ∇ * H = 4 pj / c + δ D / c * δ t; в СИ: ∇ * H = j + δ D / δ t.
Это классические четыре закона описывающие природу и условия возникновения электромагнитного поля. Первая гипотеза связывает напряжённость с индукцией и является выражением теоремы электромагнитной индукции. Вторая доказывает отсутствие объектов, генерирующих магнитное поле. Третья устанавливает зависимость между током смещения и проводимостью, создающейся в магнитном поле. Четвёртая объясняет, что источником вектора электрической индукции служит сторонний заряд.
Указанные уравнения представляют собой запись в дифференциальной форме. При этом каждое из них эквивалентно скалярным уравнениям. В этой форме они имеют следующий вид:
- (δEy / δx) — (δEx / δy) = — δBx / δt;
- (δBx / δx) — (δEy / δy) + (δBz / δz) = 0;
- (δHy / δx) — (δHx / δy) = jz + δDx / δt;
- (δDx / δx) — (δDy / δy) + (δDz / δz) = ρ.
Для того чтобы воспользоваться этими постулатами для расчёта полей, нужно уравнения дополнить граничными правилами объединяющим электрическую индукцию (D), плотность электрического тока (j), напряжённость (E). Эти положения имеют вид: D = e0*e*E; B = m0*m*H; j = δ*E. Совокупность этих соотношений позволяет сделать вывод об основе электродинамики сред, находящихся в спокойном состоянии.
Интегральная форма
Запись уравнений Максвелла в интегральной и дифференциальной форме позволяет рассчитать электромагнитное поле в любой среде. Первые два уравнения, включающие интегралы, получаются путём преобразования дифференциальных форм по произвольной поверхности и применения теоремы Стокса, ограничивающей поверхность. Вторые же два путём интегрирования по произвольному объёму с дальнейшим их упрощением по теореме Остроградского — Гаусса, по ограниченной поверхности в замкнутом объёме.

Выглядят они следующим образом:
- ∫ D * ds = 4 pQ. Это закон Гаусса устанавливающий, что поток электрической индукции сквозь ограниченную поверхность зависит от величины свободного заряда, существующего в объёме формирующимся этой поверхностью.
- ∫ B * ds = 0. Теорема для магнитного поля сообщающая, что сила линий магнитной индукции через ограниченную поверхность равна нулю.
- ∫ E * dl = — d / dt*c ∫ B * ds. Свойство Фарадея обозначающее, что поток магнитной индукции, проходя через замкнутую поверхность пропорционален вращению электрического поля в контуре ограничивающим поверхность.
- ∫ H * dl = 4pI / c + (d / dt) ∫ D * ds. Правило циркуляции магнитного поля. Электрический ток свободных частиц и колебания электромагнитной индукции зависят от размера и движения магнитного потока, ограниченного контуром l.
В этих уравнениях буквой S обозначается замкнутое пространство двухмерной поверхности определяющей границы объёма V или контура l. При этом Q является электрическим зарядом, находящимся в замкнутом объёме площадью S и равным: Q = ∫p * dV, а I — электрическим током, протекающим сквозь S и определяющимся из уравнения: I = ∫j * ds.
Нужно отметить, что вектор потока по ограниченной поверхности считается направленным из объёма. Вращение же находится согласно правилу правого винта по незамкнутой площади. В уравнениях величины E, B, D и H являются равнозначными значениями, определяющимися в результате решения системы.
Значение уравнений
Система уравнений Максвелла для электромагнитного поля объясняет все электромагнитные явления. Её применяют при полном анализе полей при известных распределениях токов и заряженных частиц. Часто уравнения называют материальными, подчёркивая индивидуальные свойства занимающей пространство среды: D = e * e0 * E, B = m * m0 * H, J = E .
Формулы физика подтверждают существование электромагнитных волн. Иначе говоря, предпологают возможность электрического поля излучать энергию вне зависимости от присутствия электрических зарядов и токов. Из всего многообразия применения уравнений можно выделить основные четыре:
- Нахождение характеристик электрического и магнитного поля по известному распределению заряженных частиц и токов. То есть это теория электромагнитного поля (ЭМП) примирительная к любой системе зарядов и токов. Она обобщает электрические и магнитные явления.
- Изучение макроскопических полей. Уравнения Максвелла применимы к макрозарядам и макротокам. Их можно использовать в среде, где расстояния от источника излучения до зафиксированной точки намного превышает периоды внутренних явлений.
- Теоремы Максвелла раскрывают внутренний механизм процессов в среде, описываемых тремя фундаментальными характеристиками: ε, μ и σ.
- Используя теорию, являющуюся близкодейственной, можно описать электрические и магнитные взаимодействия, возникающие в электромагнитном поле распространяющимся с ограниченной скоростью.
Система включает в себя все основные законы электрического и магнитного поля с учётом такого важного параметра, как электромагнитная индукция. Теоретическое исследование физика позволило утверждать, что свет представляет собой электромагнитные волны и существования токов смещения в магнитном поле. То есть изменение ЭМП без движения электрических зарядов. Благодаря этому стало возможным находить полный ток.
Максвеллом было найдено четыре важных закономерности, заключающиеся в том, что электрический заряд образует электрическое поле, колебания магнитных волн порождает электрические вихри, магнитных зарядов быть не может, изменение индукции приводит к появлению вихревого магнитного потока. Эти теоретические суждения после были подтверждены экспериментально и позволили получить картину распространения свободной энергии электромагнитной волны в пространстве.
http://habr.com/ru/post/341986/
http://nauka.club/fizika/uravneniya-maksvella.html