Общее уравнение плоскости : описание, примеры, решение задач
В статье рассмотрим такой тип уравнений плоскости как общее уравнение, получим его вид и разберем на практических примерах. Рассмотрим частные случаи и понятие общего неполного уравнения плоскости.
Общее уравнение плоскости: основные сведения
Перед началом разбора темы вспомним, что такое уравнение плоскости в прямоугольной системе координат в трёхмерном пространстве. Пусть нам дана прямоугольная система координат O x y z в трехмерном пространстве, уравнением плоскости в заданной системе координат будет такое уравнение с тремя неизвестными x , y , и z , которому отвечали бы координаты всех точек этой плоскости и не отвечали бы координаты никаких прочих точек. Иначе говоря, подставив в уравнение плоскости координаты некоторой точки этой плоскости, получаем тождество. Если же в уравнение подставить координаты какой-то другой точки, не принадлежащей заданной плоскости, равенство станет неверным.
Также вспомним определение прямой, перпендикулярной к плоскости: прямая является перпендикулярной к заданной плоскости, если она перпендикулярна любой прямой, принадлежащей этой плоскости.
Любую плоскость, заданную в прямоугольной системе координат O x y z трехмерного пространства, можно определить уравнением A x + B y + C z + D = 0 . В свою очередь, любое уравнение A x + B y + C z + D = 0 определяет некоторую плоскость в данной прямоугольной системе координат трехмерного пространства. A , B , C , D – некоторые действительные числа, и числа A , B , C не равны одновременно нулю.
Теорема состоит из двух частей. Разберем доказательство каждой из них.
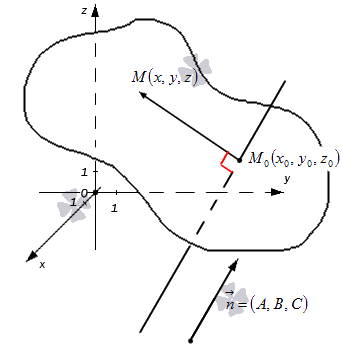
- Первая часть теоремы гласит, что любую заданную плоскость возможно описать уравнением вида A x + B y + C z + D = 0 . Допустим, задана некоторая плоскость и точка M 0 ( x 0 , y 0 , z 0 ) , через которую эта плоскость проходит. Нормальным вектором этой плоскости является n → = ( A , B , C ) . Приведем доказательство, что указанную плоскость в прямоугольной системе координат O x y z задает уравнение A x + B y + C z + D = 0 .
Возьмем произвольную точку заданной плоскости M ( x , y , z ) .В таком случае векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) будут перпендикулярны друг другу, а значит их скалярное произведение равно нулю:
n → , M 0 M → = A x — x 0 + B ( y — y 0 ) + C ( z — z 0 ) = A x + B y + C z — ( A x 0 + B y 0 + C z 0 )
Примем D = — ( A x 0 + B y 0 + C z 0 ) , тогда уравнение преобразуется в следующий вид: A x + B y + C z + D = 0 . Оно и будет задавать исходную плоскость. Первая часть теоремы доказана.
- Во второй части теоремы утверждается, что любое уравнение вида A x + B y + C z + D = 0 задает некоторую плоскость в прямоугольной системе координат O x y z трехмерного пространства. Докажем это.
В теореме также указано, что действительные числа А , B , C одновременно не являются равными нулю. Тогда существует некоторая точка M 0 ( x 0 , y 0 , z 0 ) , координаты которой отвечают уравнению A x + B y + C z + D = 0 , т.е. верным будет равенство A x 0 + B y 0 + C z 0 + D = 0 . Отнимем левую и правую части этого равенства от левой и правой частей уравнения A x + B y + C z + D = 0 . Получим уравнение вида
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 , и оно эквивалентно уравнению A x + B y + C z + D = 0 . Докажем, что уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает некоторую плоскость.
Уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 являет собой условие, необходимое и достаточное для перпендикулярности векторов n → = ( A , B , C ) и M 0 M → = x — x 0 , y — y 0 , z — z 0 . Опираясь на утверждение, указанное перед теоремой, возможно утверждать, что при справедливом равенстве A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 множество точек M ( x , y , z ) задает плоскость, у которой нормальный вектор n → = ( A , B , C ) . При этом плоскость проходит через точку M ( x 0 , y 0 , z 0 ) . Иначе говоря, уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает в прямоугольной системе координат O x y z трехмерного пространства некоторую плоскость. Таким, образом, эквивалентное этому уравнению уравнение A x + B y + C z + D = 0 также определяет эту плоскость. Теорема доказана полностью.
Уравнение вида A x + B y + C z + D = 0 называют общим уравнением плоскости в прямоугольной системе координат O x y z трехмерного пространства.
Допустим, задано некоторое общее уравнение плоскости λ · A x + λ · B y + λ · C z + λ · D = 0 , где λ – некое действительное число, не равное нулю. Это уравнение также задает в прямоугольной системе координат некоторую плоскость, совпадающую с плоскостью, определяемую уравнением A x + B y + C z + D = 0 , поскольку описывает то же самое множество точек трехмерного пространства. Например, уравнения x — 2 · y + 3 · z — 7 = 0 и — 2 · x + 4 · y — 2 3 · z + 14 = 0 задают одну и ту же плоскость, поскольку им обоим отвечают координаты одних и тех же точек трехмерного пространства.
Раскроем чуть шире смысл теорем.
В пределах заданной системы координат плоскость и общее уравнение, ее определяющее, неразрывно связаны: каждой плоскости отвечает общее уравнение плоскости вида A x + B y + C z + D = 0 ( при конкретных значениях чисел A , B , C , D ). В свою очередь, этому уравнению отвечает заданная плоскость в заданной прямоугольной системе координат.
Укажем пример как иллюстрацию этих утверждений.
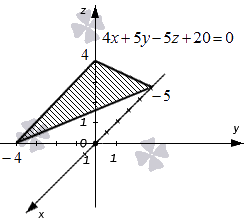
Ниже приведен чертеж, на котором изображена плоскость в фиксированной прямоугольной системе координат трехмерного пространства. Заданной плоскости отвечает общее уравнение вида 4 x + 5 y – 5 z + 20 = 0 , и ему соответствуют координаты любой точки этой плоскости. В свою очередь, уравнение 4 x + 5 y – 5 z + 20 = 0 описывает в заданной системе координат множество точек, которые составляют изображенную плоскость.
Общее уравнение плоскости, проходящей через точку
Повторимся: точка M 0 ( x 0 , y 0 , z 0 ) лежит на плоскости, заданной в прямоугольной системе координат трехмерного пространства уравнением A x + B y + C z + D = 0 в том случае, когда подставив координаты точки M 0 ( x 0 , y 0 , z 0 ) в уравнение A x + B y + C z + D = 0 , мы получим тождество.
Заданы точки M 0 ( 1 , — 1 , — 3 ) и N 0 ( 0 , 2 , — 8 ) и плоскость, определяемая уравнением 2 x + 3 y — z — 2 = 0 . Необходимо проверить, принадлежат ли заданные точки заданной плоскости.
Решение
Подставим координаты точки М 0 в исходной уравнение плоскости:
2 · 1 + 3 · ( — 1 ) — ( — 3 ) — 2 = 0 ⇔ 0 = 0
Мы видим, что получено верное равенство, значит точка M 0 ( 1 , — 1 , — 3 ) принадлежит заданной плоскости.
Аналогично проверим точку N 0 . Подставим ее координаты в исходное уравнение:
2 · 0 + 3 · 2 — ( — 8 ) — 2 = 0 ⇔ 12 = 0
Равенство неверно. Таким, образом, точка N 0 ( 0 , 2 , — 8 ) не принадлежит заданной плоскости.
Ответ: точка М 0 принадлежит заданной плоскости; точка N 0 – не принадлежит.
Приведенное выше доказательство теоремы об общем уравнении дает нам возможность использовать важный факт: вектор n → = ( A , B , C ) — нормальный вектор для плоскости, определяемой уравнением A x + B y + C z + D = 0 . Так, если нам известен вид общего уравнения, то возможно записать координаты нормального вектора заданной плоскости.
В прямоугольной системе координат задана плоскость 2 x + 3 y — z + 5 = 0 . Необходимо записать координаты всех нормальных векторов заданной плоскости.
Решение
Мы знаем, что заданные общим уравнением коэффициенты при переменных x , y , z служат координатами нормального вектора заданной плоскости. Тогда, нормальный вектор n → исходной плоскости имеет координаты 2 , 3 , — 1 . В свою очередь, множество нормальных векторов запишем так:
λ · n → = λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Ответ: λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Разберем обратную задачу, когда требуется составить уравнение плоскости по заданным координатам нормального вектора.
Очевидным фактом является то, что нормальный вектор n → = ( A , B , C ) является нормальным вектором бесконечного множества параллельных плоскостей. Поэтому для обозначения конкретной плоскости введем дополнительное условие: зададим некоторую точку M 0 ( x 0 , y 0 , z 0 ) , принадлежащую плоскости. Так, задавая в условии нормальный вектор и некоторую точку плоскости, мы ее зафиксировали.
Общее уравнение плоскости с нормальным вектором n → = ( A , B , C ) будет выглядеть так: A x + B y + C z + D = 0 . По условию задачи точка M 0 ( x 0 , y 0 , z 0 ) принадлежит заданной плоскости, т.е. ее координаты отвечают уравнению плоскости, а значит верно равенство: A x 0 + B y 0 + C z 0 + D = 0
Вычитая соответственно правые и левые части исходного уравнения и уравнения A x 0 + B y 0 + C z 0 + D = 0 , получим уравнение вида A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 . Оно и будет уравнением плоскости, проходящей через точку M 0 ( x 0 , y 0 , z 0 ) и имеющей нормальный вектор n → = ( A , B , C ) .
Возможно получить это уравнение другим способом.
Очевидным фактом является то, что все точки М ( x , y , z ) трехмерного пространства задают данную плоскость тогда и только тогда, когда векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) перпендикулярны или, иначе говоря, когда скалярное произведение этих векторов равно нулю:
n → , M 0 M → = A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
Задана точка М 0 ( — 1 , 2 , — 3 ) , через которую в прямоугольной системе координат проходит плоскость, а также задан нормальный вектор этой плоскости n → = ( 3 , 7 , — 5 ) . Необходимо записать уравнение заданной плоскости.
Решение
Рассмотрим два способа решения.
- Исходные условия позволяют получить следующие данные:
x 0 = — 1 , y 0 = 2 , z 0 = — 3 , A = 3 , B = 7 , C = — 5
Подставим их в общее уравнение плоскости, проходящей через точку, т.е. в A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
3 ( x — ( — 1 ) ) + 7 ( y — 2 ) — 5 ( z — ( — 3 ) ) = 0 ⇔ 3 x + 7 y — 5 z — 26 = 0
- Допустим, М ( x , y , z ) – некоторая точки заданной плоскости. Определим координаты вектора M 0 M → по координатам точек начала и конца:
M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) = ( x + 1 , y — 2 , z + 3 )
Чтобы получить искомое общее уравнение плоскости, необходимо также воспользоваться необходимым и достаточным условием перпендикулярности векторов и тогда:
n → , M 0 M → = 0 ⇔ 3 ( x + 1 ) + 7 ( y — 2 ) — 5 ( z + 3 ) = 0 ⇔ ⇔ 3 x + 7 y — 5 z — 26 = 0
Ответ: 3 x + 7 y — 5 z — 26 = 0
Неполное общее уравнение плоскости
Выше мы говорили о том, что, когда все числа А , B , C , D отличны от нуля, общее уравнение плоскости A x + B y + C z + D = 0 называют полным. В ином случае общее уравнение плоскости является неполным.
Разберем все возможные варианты общих неполных уравнений в прямоугольной системе координат трехмерного пространства.
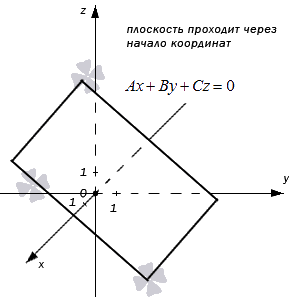
- В случае, когда D = 0 , мы получаем общее неполное уравнение плоскости: A x + B y + C z + D = 0 ⇔ A x + B y + C z = 0
Такая плоскость в прямоугольной системе координат проходит через начало координат. В самом деле, если подставим в полученное неполное уравнение плоскости координаты точки О ( 0 , 0 , 0 ) , то придем к тождеству:
A · 0 + B · 0 + C · 0 = 0 ⇔ 0 ≡ 0
- Если А = 0 , В ≠ 0 , С ≠ 0 , или А ≠ 0 , В = 0 , С ≠ 0 , или А ≠ 0 , В ≠ 0 , С = 0 , то общие уравнения плоскостей имеют вид соответственно: B y + C z + D = 0 , или A x + C z + D = 0 , или A x + B y + D = 0 . Такие плоскости параллельны координатным осям О x , O y , O z соответственно. Когда D = 0 , плоскости проходят через эти координатные оси соответственно. Также заметим, что неполные общие уравнения плоскостей B y + C z + D = 0 , A x + C z + D = 0 и A x + B y + D = 0 задают плоскости, которые перпендикулярны плоскостям O y z , O x z , O z y соответственно.
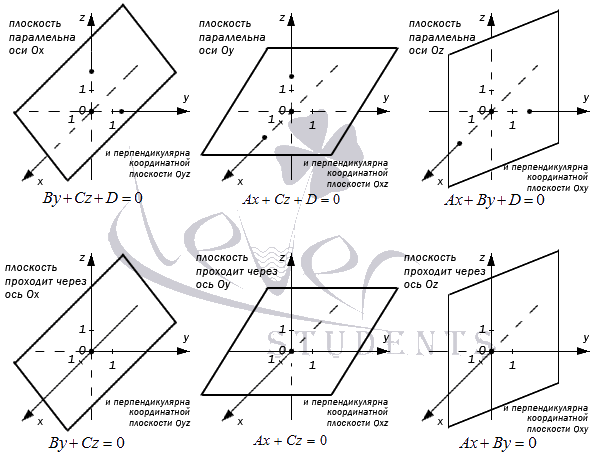
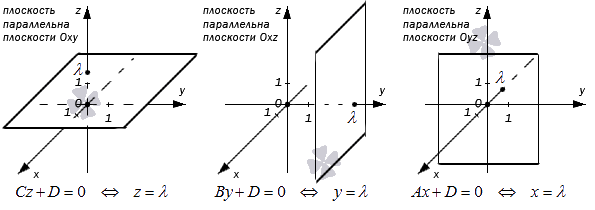
- При А = 0 , В = 0 , С ≠ 0 , или А = 0 , В ≠ 0 , С = 0 , или А ≠ 0 , В = 0 , С = 0 получим общие неполные уравнения плоскостей: C z + D = 0 ⇔ z + D C = 0 ⇔ z = — D C ⇔ z = λ , λ ∈ R или B y + D = 0 ⇔ y + D B = 0 ⇔ y = — D B ⇔ y = λ , λ ∈ R или A x + D = 0 ⇔ x + D A = 0 ⇔ x = — D A ⇔ x = λ , λ ∈ R соответственно.
Эти уравнения определяют плоскости, которые параллельны координатным плоскостям O x y , O x z , O y z соответственно и проходят через точки 0 , 0 , — D C , 0 , — D B , 0 и — D A , 0 , 0 соответственно. При D = 0 уравнения самих координатных плоскостей O x y , O x z , O y z выглядят так: z = 0 , y = 0 , x = 0
Задана плоскость, параллельная координатной плоскости O y z и проходящая через точку М 0 ( 7 , — 2 , 3 ) . Необходимо составить общее уравнение заданной плоскости.
Решение
Условием задачи определено, что заданная плоскость параллельна координатной плоскости O y z , а, следовательно, может быть задана общим неполным уравнением плоскости A x + D = 0 , A ≠ 0 ⇔ x + D A = 0 . Поскольку точка M 0 ( 7 , — 2 , 3 ) лежит на плоскости по условию задачи, то очевидно, что координаты этой точки должны отвечать уравнению плоскости x + D A = 0 , иначе говоря, должно быть верным равенство 7 + D A = 0 . Преобразуем: D A = — 7 , тогда требуемое уравнение имеет вид: x — 7 = 0 .
Задачу возможно решить еще одним способом.
Вновь обратим внимание на заданную условием задачи параллельность данной плоскости координатной плоскости O y z . Из этого условия понятно, что возможно в качестве нормального вектора заданной плоскости использовать нормальный вектор плоскости O y z : i → = ( 1 , 0 , 0 ) . Так, нам известны и точка, принадлежащая плоскости (задана условием задачи) и ее нормальный вектор. Таким образом, становится возможно записать общее уравнение заданной плоскости:
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 ⇔ ⇔ 1 · ( x — 7 ) + 0 · ( y + 2 ) + 0 · ( z — 3 ) = 0 ⇔ ⇔ x — 7 = 0
Ответ: x — 7 = 0
Задана плоскость, перпендикулярная плоскости O x y и проходящая через начало координат и точку М 0 ( — 3 , 1 , 2 ) .
Решение
Плоскость, которая перпендикулярна координатной плоскости O x y определяется общим неполным уравнением плоскости A x + B y + D = 0 ( А ≠ 0 , В ≠ 0 ) . Условием задачи дано, что плоскость проходит через начало координат, тогда D = 0 и уравнение плоскости принимает вид A x + B y = 0 ⇔ x + B A y = 0 .
Найдем значение B A . В исходных данных фигурирует точка М 0 ( — 3 , 1 , 2 ) , координаты которой должны отвечать уравнению плоскости. Подставим координаты, получим верное равенство: — 3 + B A · 1 = 0 , откуда определяем B A = 3 .
Так, мы имеем все данные, чтобы записать требуемое общее уравнение плоскости: x + 3 y = 0 .
Уравнения фигур
Уравнение фигуры — это уравнение с двумя переменными x и y, для которого выполняются два условия: 1) координаты любой точки фигуры F удовлетворяют этому уравнению.
Содержание:
Понятие уравнения фигур
Название этого раздела означает: геометрические фигуры можно задавать уравнениями (некоторые фигуры можно задавать неравенствами).
Известно, что точки плоскости и пространства задаются их координатами, геометрические фигуры могут задаваться уравнениями или неравенствами:  — уравнение прямой;
— уравнение прямой;  — уравнение окружности;
— уравнение окружности;  — уравнение сферы и т. д.
— уравнение сферы и т. д.
Говорят, что фигура F задается уравнением в прямоугольных координатах, если точка принадлежит фигуре F тогда и только тогда, когда координаты этой точки удовлетворяют данному уравнению. Это означает, что выполняются два условия:
1. Если точка принадлежит фигуре F, то ее координаты удовлетворяют данному уравнению.
2. Если числа х, у, г удовлетворяют данному уравнению, то точка с такими координатами принадлежит фигуре F.
Второе условие можно выразить иначе: координаты любой точки, не принадлежащей фигуре F, не удовлетворяют данному уравнению.
Например, прямая, перпендикулярная оси Ох и проходящая через точку М(2, 0), на оси Ох задается уравнением х = 2 (рис. 2.461). Действительно, каждая точка, лежащая на этой прямой, имеет одну и ту же координату 2. А любая точка, не лежащая на этой прямой, имеет другое значение координаты х, нежели 2. Ось Оу задается уравнением х = 0.
Аналогично прямая, перпендикулярная оси Оу и проходящая через точку Щ0, 3), имеет уравнение у = 3 (рис. 2.462). Ось Ох имеет уравнение у = 0.

Уравнение прямой
Можно доказать такую теорему.
Теорема 3. Любая прямая в декартовой системе координат хОу имеет уравнение вида 
 — некоторые числа.
— некоторые числа.
Выясним, как расположена прямая относительно осей координат, если ее уравнение  имеет тот или иной частный вид.
имеет тот или иной частный вид.
1.  В этом случае уравнение прямой можно переписать так:
В этом случае уравнение прямой можно переписать так: 
Таким образом, все точки прямой имеют одну и ту же ординату  ; следовательно, прямая параллельна оси х (рис. 2.463). В частности, если с = 0, то прямая совпадает с осью Ох.
; следовательно, прямая параллельна оси х (рис. 2.463). В частности, если с = 0, то прямая совпадает с осью Ох.
2.  Этот случай рассматривается аналогично. Прямая параллельна оси Оу (рис. 2.464) и совпадает с ней, если и с = 0.
Этот случай рассматривается аналогично. Прямая параллельна оси Оу (рис. 2.464) и совпадает с ней, если и с = 0.

3. с = 0. Прямая проходит через начало координат, так как его координаты (0; 0) удовлетворяют уравнению прямой (рис. 2.465).
Если в общем уравнении прямой  коэффициент при у не равен нулю, то это уравнение можно разрешить относительно у. Получим:
коэффициент при у не равен нулю, то это уравнение можно разрешить относительно у. Получим:  Или, обозначая
Или, обозначая  получим: у = kх + d.
получим: у = kх + d.
Коэффициент k в уравнении прямой с точностью до знака равен тангенсу острого угла, который образует прямая с осью Ох. В уравнении прямой, изображенной на рисунке 2.466, k > 0.
Коэффициент k в уравнении прямой называют угловым коэффициентом прямой.

Уравнения окружности и сферы
Составим уравнение окружности с центром в точке  и радиусом R (рис. 2.467).
и радиусом R (рис. 2.467).
1. Возьмем произвольную точку А(х, у) на окружности. Расстояние от нее до центра О равно R.
2. Квадрат расстояния от точки А до точки О равен  (формула расстояния между точками).
(формула расстояния между точками).
3. Координаты х, у каждой точки А окружности удовлетворяют уравнению

(2, определение окружности).
Получили искомое уравнение. Обратно: любая точка А, координаты которой удовлетворяют уравнению окружности, принадлежит окружности, так как расстояние от нее до точки О равно R. Отсюда следует, что данное уравнение действительно является уравнением окружности с центром в точке О и радиусом R.
Заметим, что если центром окружности является начало координат, то уравнение окружности имеет вид:

Выведем теперь уравнение сферы. Пусть в пространстве введена прямоугольная система координат и задана сфера S с центром  и радиусом R. Эта сфера есть множество точек М, для которых расстояние от А равно R, т. е. AM = R (рис. 2.468).
и радиусом R. Эта сфера есть множество точек М, для которых расстояние от А равно R, т. е. AM = R (рис. 2.468).

Пусть х, у, z — координаты точки М. Согласно формуле расстояния между точками в пространстве, предыдущее равенство можно записывать в координатах так:


Это и есть уравнение сферы S с центром  и радиусом R, т. е. множество точек, координаты которых удовлетворяют данному уравнению, представляет собой сферу S (рис. 2.468).
и радиусом R, т. е. множество точек, координаты которых удовлетворяют данному уравнению, представляет собой сферу S (рис. 2.468).
Если центр А находится в начале координат, т. е.  то уравнение получает простой вид:
то уравнение получает простой вид:

Рассмотрим шар с центром и радиусом R (рис. 2.469).

По определению, это множество точек М, для которых  , т. е.
, т. е.  . Выражая расстояние AM через координаты точки М(х, у, z), получим:
. Выражая расстояние AM через координаты точки М(х, у, z), получим:

Это неравенство задает шар S с центром и радиусом R, так как оно равносильно неравенству  , задающему такой шар по самому его определению.
, задающему такой шар по самому его определению.
Если центр шара находится в начале координат, то уравнение шара упрощается и имеет вид:

Два предприятия A и В производят продукцию с одной и той же ценой т за одно изделие. Однако автопарк, обслуживающий предприятие А, оснащен более современными и более мощными грузовыми автомобилями. В результате транспортные расходы на перевозку одного изделия составляют для предприятия А 10 руб. на 1 км, а для предприятия В 20 руб. на 1 км. Расстояние между предприятиями 300 км. Как территориально должен быть разделен рынок сбыта между двумя предприятиями для того, чтобы расходы потребителей при покупке изделий были минимальными?
Решение:
1. Выберем систему координат так, чтобы ось Ох проходила через пункты А и В, а ось Оу — через точку А (построение) (рис. 2.470).

2. Пусть N — произвольная точка,  — расстояния от точки N до предприятий А и Б (рис. 2.471).
— расстояния от точки N до предприятий А и Б (рис. 2.471).

3. При доставке груза из пункта А расходы равны  (1,2).
(1,2).
4. При доставке груза из пункта Б расходы равны  (1,2).
(1,2).
5. Если для пункта N выгоднее доставлять груз с предприятия А, то  откуда
откуда 
 , в обратном случае получим
, в обратном случае получим  (3,4).
(3,4).
6. Таким образом, границей этих двух областей для каждой точки, до которой расходы на перевозку груза из пунктов А и Б равны, будет множество точек плоскости, удовлетворяющих уравнению  (5)
(5)
7. Выразим  через координаты:
через координаты:
 (1,2, формула расстояния между точками).
(1,2, формула расстояния между точками).
8. Имея в виду равенство из п. 6, получим:
 (6,7).
(6,7).
9. Это есть уравнение окружности (рис. 2.472).
Следовательно, для всех пунктов, попадающих во внутреннюю область круга, выгоднее привозить груз из пункта В, а для всех пунктов, попадающих во внешнюю часть круга, — из пункта А.
Пример 2.
Два наблюдаемых пункта находятся в точках  Пункт наблюдения О находится на прямой АВ и удален от точки А на расстояние
Пункт наблюдения О находится на прямой АВ и удален от точки А на расстояние  км, а от В на расстояние с км (с >
км, а от В на расстояние с км (с >  ). Наблюдатель для безопасности должен идти по такому пути, чтобы расстояние от него до пункта А все время оставалось в два раза больше, чем расстояние от него до пункта В. По какой линии должен идти наблюдатель?
). Наблюдатель для безопасности должен идти по такому пути, чтобы расстояние от него до пункта А все время оставалось в два раза больше, чем расстояние от него до пункта В. По какой линии должен идти наблюдатель?
Решение:
Из условий задачи имеем:
1. Два наблюдаемых пункта находятся в точках
2. Пункт наблюдения О находится на прямой АВ и удален от А на расстоянии  км, а от В — с км (с >
км, а от В — с км (с >  ).
).
3. Наблюдатель идет так, чтобы расстояние до пункта А было в два раза больше, чем до В.
4. По какой линии должен идти наблюдатель?

5. Примем за начало координат наблюдательный пункт О и направление оси Ох будет проходить через пункты А и В (по условию задачи эти три точки находятся на одной прямой) (рис. 2.473).
6. Пусть наблюдатель находится в точке М(х, у). Вычислим расстояние от наблюдателя до пунктов А и В (рис. 2.473):

(1, 2, 3, 5, формула расстояния между точками).
7. По условию задачи имеем: МА = 2MB, т. е.
 (3, 6).
(3, 6).
8. Решая это уравнение, получим:

9. Раскроем скобки и перегруппируем:

10. Наблюдатель должен идти по окружности с центром  и радиусом
и радиусом  (4, уравнение окружности).
(4, уравнение окружности).
Эта лекция взята со страницы полного курса лекций по изучению предмета «Математика»:
Смотрите также дополнительные лекции по предмету «Математика»:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Аналитическая геометрия

Введение
Аналитическая геометрия – раздел математики, в котором геометрические задачи решаются средствами алгебры на основе метода координат. Возникновение метода координат тесно связано с бурным развитием астрономии, механики и техники в 17 в. Отчётливое и исчерпывающее изложение этого метода и основ аналитической геометрии было сделано P. Декартом в его «Геометрии» (1637). Основные идеи метода были известны также его современнику П. Ферма. Дальнейшая разработка аналитической геометрии связана с трудами Г. Лейбница, И. Ньютона и особенно Л. Эйлера.
Важность аналитической геометрии заключается в том, что данное направление устанавливает взаимосвязь между геометрическими кривыми и алгебраическими уравнениями. Это соотношение делает возможным преобразование задач геометрии в задачи алгебраических уравнений и наоборот. В последнее время, время бурного роста компьютерных технологий, такие понятия как компьютерная анимация и автоматическое осуществление дизайна представляются явлениями повседневными. Эти прикладные программы основаны на трехмерной аналитической геометрии.
Основными понятиями аналитической геометрии являются простейшие геометрические образы (точки, прямые, плоскости, кривые и поверхности второго порядка. Методы аналитической геометрии применимы к фигурам на плоскости и к поверхностям в трехмерном пространстве, а также допускают естественное обобщение и на пространства более высоких размерностей. Мы начнем с аналитической геометрии на плоскости.
Основная задача аналитической геометрии заключается в изучении геометрических фигур с помощью соотношений между координатами точек, из которых эти фигуры образованы. Любую фигуру можно рассматривать как множество точек, удовлетворяющих некоторому геометрическому условию. Это условие можно записать в виде алгебраического уравнения, связывающего координаты x и y каждой точки фигуры. Суть метода аналитической геометрии состоит в изучении свойств фигуры с помощью соответствующего уравнения, исследуемого средствами алгебры. Этот метод позволяет устанавливать геометрические факты систематичным образом, в отличие от традиционной «синтетической» геометрии, где приходилось изобретать методы доказательства для каждого отдельного случая.
Сущность метода координат заключается в следующем. Рассмотрим, например, на плоскости p две взаимно перпендикулярные прямые Ox и Оу . Эти прямые с указанными на них положительными направлениями, началом координат О и выбранной масштабной единицей образуют декартову прямоугольную систему координат Оху на плоскости. Прямые Ox и Оу называются соответственно осью абсцисс и осью ординат. Положение любой точки М на плоскости по отношению к этой системе Оху можно определить следующим образом. Пусть Mx и My — проекции М на Ox и Оу, а числа х и y — величины направленных отрезков OMx и ОМу . Понятие направленный отрезок означает, что величина х отрезка OMx, например, равна длине этого отрезка, взятой со знаком плюс, если направление от О к Mx совпадает с направлением на прямой Ox, и со знаком минус в противоположном случае. Числа х и у называются декартовыми прямоугольными координатами точки М в системе Оху. Обычно они называются соответственно абсциссой и ординатой точки M. Для обозначения точки М с абсциссой х и ординатой у пользуются символом М(х, у). Ясно, что координаты точки М определяют её положение относительно системы Оху.
Пусть на плоскости p с данной декартовой прямоугольной системой координат Оху задана некоторая линия L. Используя понятие координат точек, можно ввести понятие уравнения данной линии L относительно системы Оху как соотношения вида F(x, y) = 0, которому удовлетворяют координаты х и у любой точки M, расположенной на L, и не удовлетворяют координаты каждой точки, не лежащей на L. Если, например, линия L является окружностью радиуса R с центром в начале координат O, то уравнение x2+ y2 — R2 = 0 будет уравнением рассматриваемой окружности, в чём можно убедиться, обратившись к рис. 2. Если точка М лежит на окружности, то по теореме Пифагора для треугольника OMMx получается x2 + y2 — R2 = 0. Если же точка не лежит на окружности, то, очевидно, x2 + y2 — R2 ¹ 0. Итак, линии L на плоскости можно сопоставить её уравнение F(x, y) = 0 относительно системы координат Оху.
Основная идея метода координат на плоскости состоит в том, что геометрические свойства линии L выясняются путём изучения аналитическими и алгебраическими средствами свойств уравнения F(x, y) = 0 этой линии. Например, применим метод координат для выяснения числа точек пересечения окружности С радиуса R и данной прямой линии В (рис. 3).

Пусть начало системы координат Оху находится в центре окружности, а ось Ox направлена перпендикулярно прямой В. Так как прямая В перпендикулярна оси Ox, то абсцисса любой точки этой прямой равна некоторой постоянной a. Таким образом, уравнение прямой В имеет вид x — a = 0. Координаты (x, y) точки пересечения окружности С, уравнение которой имеет вид x2 + y2 — R2 = 0, и прямой В удовлетворяют одновременно уравнениям
то есть являются решением системы (1). Следовательно, геометрический вопрос о числе точек пересечения прямой и окружности сводится к аналитическому вопросу о числе решений алгебраической системы (1). Решая эту систему, получают х = a, у = ±  . Итак, окружность и прямая могут пересекаться в двух точках (R2 > a2) (этот случай изображен на рис. 3), могут иметь одну общую точку (R2 = a2) (в этом случае прямая В касается окружности C) и не иметь общих точек (R2
. Итак, окружность и прямая могут пересекаться в двух точках (R2 > a2) (этот случай изображен на рис. 3), могут иметь одну общую точку (R2 = a2) (в этом случае прямая В касается окружности C) и не иметь общих точек (R2
http://natalibrilenova.ru/uravneniya-figur/
http://pandia.ru/text/78/223/65654.php