Характеристическое уравнение передаточной функции замкнутой системы
Контрольная работа: Передаточные функции одноконтурной системы
Название: Передаточные функции одноконтурной системы Раздел: Рефераты по математике Тип: контрольная работа Добавлен 21:52:15 24 декабря 2010 Похожие работы Просмотров: 508 Комментариев: 14 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать
Практическая работа № 1
1. По заданным дифференциальным уравнениям определить операторные уравнения при нулевых начальных условиях, передаточные функции, структурные схемы звеньев, характеристические уравнения и их корни. Показать распределение корней на комплексной плоскости.
Оценить устойчивость каждого из звеньев.
а) ; б).
2. По заданной передаточной функции записать дифференциальное уравнение:
.
1.а). Дифференциальное уравнение можно записать в виде:
.
Обозначим Y(s) и F(s) как изображения сигналов соответственно y и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
1,25s3Y(s) – 4s2Y(s) + 5sY(s) = 3F(s) – sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и F(s) за скобки:
Y(s). (1,25s3 – 4s2 + 5s) = F(s). (3 – s).
.
Очевидно, что входной сигнал x отсутствует, и выходной сигнал у определяется только внешним воздействием f (система, действующая по возмущению): , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
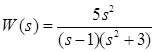
Передаточная функция имеет знаменатель, называемый характеристическим выражением:
A(s) =.
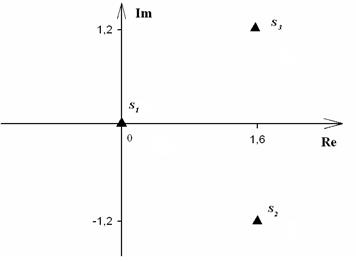
Если приравнять данное выражение к нулю, то образуется характеристическое уравнение , корни которого:
, и .
Распределение корней на комплексной плоскости показано на рис. 2. По рисунку видно, что корни лежат в правой полуплоскости, следовательно, объект неустойчив.
б) Дифференциальное уравнение можно записать в виде:
.
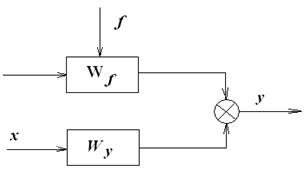
Обозначим Y(s), X(s) и F(s) как изображения сигналов соответственно y , x и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
2s2Y(s) + 4sY(s) + 10Y(s) = 3X(s) + 4sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и X(s) за скобки:
Y(s). (5s2 + 4s + 10) = 3X(s) + 4sF(s).
.
Если обозначить передаточные функции объекта как
и ,
то получается уравнение Y(s) = Wx(s).X(s) + WF(s).F(s). Структурная схема объекта приведена на рис. 3.
Характеристическая функция имеет вид:
,
а характеристическое уравнение:
.
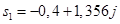
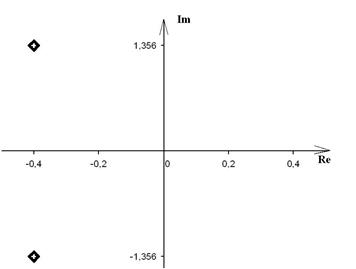
Корни этого уравнения равны:
и .
Распределение корней на комплексной плоскости показано на рис. 4:
Все корни характеристического уравнения лежат в левой полуплоскости, очевидно, что объект устойчив.
Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ). Требуется определить:
— передаточную функцию разомкнутой системы W∞(s),
— характеристическое выражение замкнутой системы (ХВЗС),
— передаточные функции замкнутой системы Фз(s) – по заданию, Фв(s) – по возмущению, ФЕ(s) – по ошибке,
— коэффициенты усиления АСР,
Р — ПИ-регулятор с ПФ вида ;
дифференциальное уравнение объекта управления:
.
Определим передаточную функцию объекта:
Wоб(s) .
Передаточная функция разомкнутой системы имеет вид:
Характеристическое выражение замкнутой системы:
;
Передаточные функции замкнутой системы:
— по заданию;
— по ошибке;
— по возмущению.
По передаточным функциям определим коэффициенты усиления путем подстановки в них s = 0:
К3 = Ф3(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Определим устойчивость АСР по критерию Гурвица.
Так как коэффициенты ХВЗС а3 = 4, а2 = 6, а1 = 18, а0 = 4 (степень полинома n = 3), то матрица Гурвица имеет вид:
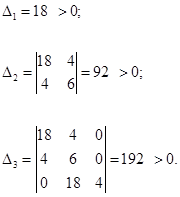
Диагональные миноры матрицы равны соответственно:
Поскольку все определители положительны, то АСР является устойчивой.
Практическая работа № 3
По табличным данным построить переходную кривую объекта, определить параметры передаточной функции объекта, рассчитать настройки ПИД-регулятора, обеспечивающие 20%-е перерегулирование.
DXвх = 5,5 кПа; DY = 0,149 %; tзап = 40 сек
Связь передаточных функций и частотных характеристик разомкнутого и замкнутого контуров системы автоматического управления
Передаточные функции находят широкое применение при исследовании систем автоматического управления. Зная передаточную функцию, можно определить временные и частотные характеристики системы. Кроме того, можно определить и изменение регулируемой величины при приложении к системе воздействий произвольной формы.
В зависимости от того, рассматривается ли поведение системы при задающем или при возмущающем воздействии, различают передаточные функции системы по задающему и по возмущающему воздействиям. При этом различают передаточные функции разомкнутых и замкнутых систем.
Рассмотрим понятие передаточной функции системы по задающему воздействию.
Передаточной функцией системы по задающему воздействию называется отношение изображения по Лапласу выходной величины системы X(p)=L[x(t)] к изображению по Лапласу задающего воздействия G(p)=L[g(t)] при нулевых начальных условиях.
Передаточная функция замкнутой системы по задающему воздействию обозначается через Ф(р) и равна
. (7.10)
Передаточная функция разомкнутой системы по задающему воздействию обозначается через W(p) и равна
, (7.11)
где Xр(p) – изображение по Лапласу выходной величины разомкнутой системы при нулевых начальных условиях.
Передаточной функцией системы по возмущающему воздействию называется отношение изображения по Лапласу выходной величины системы к изображению по Лапласу возмущающего воздействия F(p)=L[f(t)] при нулевых начальных условиях.
Передаточная функция замкнутой системы по возмущающему воздействию обозначается через Ff(p) и равна
. (7.12)
Передаточная функция разомкнутой системы по возмущающему воздействию обозначается через V(p) и равна
. (7.13)
При определении передаточных функций разомкнутых систем имеется в виду, что рассматривается поведение системы, у которой главная отрицательная обратная связь разомкнута.
Кроме рассмотренных выше передаточных функций, при анализе систем автоматического регулирования очень часто используют передаточную функцию замкнутой системы по ошибке.
Передаточной функцией замкнутой системы по сигналу ошибки называется отношение изображения по Лапласу ошибки к изображению по Лапласу задающего воздействия при нулевых начальных условиях. Она равна
, (7.14)
где E(p)=L[e(t)] – изображение по Лапласу ошибки системы при нулевых начальных условиях.
Определим связь между передаточными функциями разомкнутой и замкнутой систем автоматического регулирования. Так как структурная схема любой сложной многоконтурной системы с одной регулируемой величиной методами структурных преобразований может быть приведена к схеме одноконтурной системы, то в общем случае структурная схема САУ может быть представлена так, как изображено на рис.7.5,а. Задающее воздействие g(t) приложено ко входу звена с передаточной функцией W1(p), а возмущающее воздействие f(t) действует на вход звена W2(p). Разомкнем систему, т.е. отключим выход звена W2(p) от сумматора. Структурная схема примет вид, изображенный на рис.7.5,б.
Пользуясь правилом структурных преобразований и применяя принцип суперпозиции, так как САУ является линейной, определим передаточные функции разомкнутой системы.
Передаточная функция разомкнутой системы по задающему воздействию при f(t)=0 будет равна
, (7.15)
а по возмущающему воздействию при g(t)=0 будет иметь вид
. (7.16)
Замкнем систему, т.е. вновь подключим выход звена W2(p) к сумматору (рис.7.5,а).
Рис.7.5. Преобразование структурной схемы САУ
Рассмотрим поведение системы при задающем воздействии и при f(t)=0. Тогда структурная схема САУ примет вид, как показано на рис.7.5,в, а передаточная функция замкнутой системы по задающему воздействию примет вид
. (7.17)
Определим выражение для передаточной функции замкнутой системы по ошибке. Поведение системы рассматривается только при задающем воздействии, а выходной величиной системы является ошибка e (рис.7.5,г). Тогда передаточная функция замкнутой системы по ошибке равна
. (7.18)
Сравнивая выражения (7.17) и (7.18), можно записать
Полученные выражения (7.17), (7.18) устанавливают связь между передаточной функцией разомкнутой САУ и передаточными функциями замкнутой системы соответственно по задающему воздействию и по сигналу ошибки.
Рассмотрим поведение системы только при возмущающем воздействии, т.е. g(t)=0. Тогда структурная схема системы примет вид, изображенный на рис.7.5,д, а передаточная функция замкнутой системы по возмущающему воздействию будет
. (7.19)
Выражение (7.19) определяет связь между передаточной функцией замкнутой системы по возмущающему воздействию и передаточными функциями разомкнутой системы.
По передаточной функции разомкнутой системы по задающему воздействию можно определить характеристические полиномы и характеристические уравнения системы в разомкнутом и замкнутом состояниях. Передаточная функция W(p) может быть представлена как отношение двух многочленов:
, (7.20)
(7.21)
Многочлен является характеристическим полиномом разомкнутой системы. Таким образом, характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции W(p) (7.20), заменив переменную и приравняв полученное выражение к нулю, т.е. Dр(s)=0. Следовательно, характеристическое уравнение разомкнутой системы имеет вид:
. (7.22)
Аналогично может быть получено характеристическое уравнение замкнутой системы. Так как
, (7.23)
то, подставив выражение (7.20) в (7.23), получим
. (7.24)
Таким образом, характеристическое уравнение замкнутой системы будет иметь вид:
Выражение (7.26) показывает, что характеристическое уравнение замкнутой системы можно получить по передаточной функции разомкнутой системы. Для этого необходимо просуммировать многочлен числителя и знаменателя передаточной функции W(p), заменить переменную и полученное выражение приравнять к нулю.
Вполне очевидно, что характеристическое уравнение как замкнутой, так и разомкнутой систем имеет одну и ту же степень.
Из выражений (7.17), (7.18) и (7.19) видим, что знаменатели этих выражениий одинаковые. Поэтому характеристическое уравнение замкнутой системы может быть получено по любой из передаточных функций замкнутой системы.
Определение передаточных функций разомкнутой и замкнутой системы
Задана функциональная схема потенциометрической следящей системы автоматического управления (САУ), рис.1.
Рис. 1 Функциональная схема следящей системы
В схему входят следующие элементы: КУ- корректирующее устройство, МУ – магнитный усилитель, Д- двигатель постоянного тока, приводящий в движение исполнительный механизм. Математическая модель данной структуры представлена в виде структурной схемы, рис.2. Значения коэффициентов передачи и постоянных времени звеньев приведены в табл.2.
Рис.2. Структурная схема системы
1. Определить передаточную функцию разомкнутой системы.
2. Найти передаточную функцию замкнутой системы при единичной отрицательной обратной связи.
3. Определить предельное значение коэффициента передачи по условию устойчивости системы. Таблица 2
Параметр
Вариант
5,0
1,43
1,5
4,17
6,34
4,44
5,0
2,22
3,33
2,0
2,5
3,0
4,0
1,5
2,0
0,8
3,0
6,5
1,5
0,2
0,3
0,4
0,2
0,06
0,07
0,05
0,1
0,1
0,25
2,0
1,5
2,0
3,5
2,0
0,5
2,5
2,5
1,2
5,0
3,2
2,0
2,0
2,0
3,0
4,0
3,0
2,0
0,5
0,4
0,3
0,3
0,3
0,2
0,15
0,3
0,2
0,5
Параметр
Вариант
3,0
1,3
2,5
5, 7
7,1
4,4
6,0
2,4
3,4
8,0
3,5
3,6
4,2
1,3
2,1
0,48
3,1
3,5
2,5
0,12
0,23
0,2
0,05
0,09
0,17
0,07
0,15
0,6
0,4
3,7
2,7
1,8
2,5
3,2
3,6
2,2
0,59
3,5
1,5
1,5
5,7
3,7
2,1
2,8
1,9
3,4
4,25
5,6
3,0
0,5
0,3
0,25
0,36
0,3
0,5
0,18
0,32
0,27
4,5
Если на структурной схеме, рис.2, удалить цепь отрицательной обратной связи, то схема станет разомкнутой и приобретёт вид, рис. 3.
Рис.3. Структурная схема разомкнутой САУ
Система состоит из четырех последовательно включённых звеньев. Общая передаточная функция в этом случае определяется как
Тогда схема рис.3 может быть представлена в виде рис. 4 а. где К=К1К2К3К4 – общий коэффициент усиления
Рис.4. Структурные схемы САУ: а – разомкнутая; б — замкнутая
Если разомкнутую схему рис.4а охватить единичной обратной связью то она примет вид рис. 4б. Её общую передаточную функцию можно определить по формуле
В результате схему рис. 4б можно свернуть и представить в виде рис.5
Рис.5. Структурная схема САУ в свернутом виде
Устойчивость САУ определяется по характеристическому уравнению, полином которого находится в знаменателе передаточной функции замкнутой системы. Воспользуемся критерием устойчивости Гурвица, который формируется следующим образом: система будет устойчивой, если при аi>0 главный определитель Гурвица Δ и все его диагональные миноры Δi будут больше нуля.
Характеристическое уравнение системы
После преобразований получим
Обозначим коэффициенты при p соответственно
Тогда это уравнение будет иметь вид
где
Условие устойчивости системы по критерию Гурвица для уравнения третьего порядка определяется:
Для решаемой задачи это означает
Подставляя в это неравенство коэффициенты аi, получаем: или
Отсюда условие устойчивости
и величина предельного коэффициента передачи
Литература
Дронов В.В. Основы теории управления. Конспект лекций–В. Новгород, 2010
2. Теория автоматического управления: Учеб. для вузов/ С.Е. Душин, Н.С. Зотов, Д.Х. Имаев и др.; Под ред. В. Б. Яковлева.- М.: Высшая школа, 2009.– 567 с.
Шандров Б. В. Технические средства автоматизации: учебник для студeнтов высших учебных заведений.- М.: Издательский центр «Академия», 2007. — 368 с.
Певзнер Л.Д. Практикум по теории автоматического управленияю. –М.:Высш. школа,2006.–590 с.
Теория систем автоматического управления Бесекерский В.А., Попов Е.П.– СПб.: Профессия, 2007.–761 с.
 ; б)
; б) .
. .
. .
. .
. , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
, то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.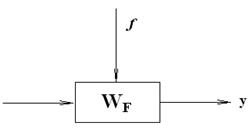
 .
. , корни которого:
, корни которого: ,
,  и
и  .
. .
. .
. и
и  ,
,
 ,
, .
. и
и  .
.
 , получим:
, получим: , тогда:
, тогда: .
.
 .
.
 ;
; .
. .
.
 ;
; — по заданию;
— по заданию; — по ошибке;
— по ошибке; — по возмущению.
— по возмущению.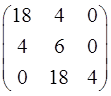
 . (7.10)
. (7.10) , (7.11)
, (7.11) . (7.12)
. (7.12) . (7.13)
. (7.13) , (7.14)
, (7.14) , (7.15)
, (7.15) . (7.16)
. (7.16)
 . (7.17)
. (7.17) . (7.18)
. (7.18) . (7.19)
. (7.19) , (7.20)
, (7.20) (7.21)
(7.21) является характеристическим полиномом разомкнутой системы. Таким образом, характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции W(p) (7.20), заменив переменную и приравняв полученное выражение к нулю, т.е. Dр(s)=0. Следовательно, характеристическое уравнение разомкнутой системы имеет вид:
является характеристическим полиномом разомкнутой системы. Таким образом, характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции W(p) (7.20), заменив переменную и приравняв полученное выражение к нулю, т.е. Dр(s)=0. Следовательно, характеристическое уравнение разомкнутой системы имеет вид: . (7.22)
. (7.22) , (7.23)
, (7.23) . (7.24)
. (7.24)


















 или
или 

