Интегрирование уравнений движения
Симуляция физики делает небольшие предсказания на основании законов физики. Эти предсказания на самом деле достаточно просты, что-то вроде «если объект вот здесь и он движется с такой скоростью в этом направлении, то за краткий промежуток времени он окажется вот тут». Мы создаём такие предсказания с помощью математической техники под названием интегрирование.
Темой этой статьи как раз и будет реализация такого интегрирования.
Интегрирование уравнений движения
Вы можете помнить из курса старшей школы или вуза, что сила равна произведению массы на ускорение.

Преобразуем это уравнение и увидим, что ускорение равно силе, делённой на массу. Это соответствует нашим интуитивным ожиданиям, потому что тяжёлые объекты труднее бросать.

Ускорение — это темп изменения скорости от времени:

Аналогично, скорость — это темп изменения позиции от времени:

Это значит, что если мы знаем текущие позицию и скорость объекта, а также приложенные к нему силы, то сможем проинтегрировать, чтобы найти его позицию и скорость в определённый момент времени.
Численное интегрирование
Если вы не изучали дифференциальные уравнения в вузе, то можете вздохнуть спокойно — вы почти в такой же ситуации, что и те, кто их изучал, потому что мы не будем решать дифференциальные уравнения аналитически. Вместо этого мы будем искать решение численным интегрированием.
Вот как работает численное интегрирование: во-первых, начнём с исходной позиции и скорости, затем сделаем небольшой шаг вперёд, чтобы найти скорость и позицию в будущем. Затем повторим это, двигаясь вперёд небольшими шагами, используя результат предыдущих вычислений как исходную точку следующих.
Но как нам найти изменение скорости и позиции на каждом шаге?
Ответ лежит в уравнениях движения.
Давайте назовём наше текущее время t, а шаг времени dt или «delta time».
Теперь мы можем представить уравнения движения в понятном всем виде:
Интуитивно это понятно: если вы находитесь в автомобиле, движущемся со скоростью 60 км/ч, то за один час вы проедете 60 км. Аналогично, автомобиль, ускоряющийся на 10 км/ч в секунду, через 10 секунд будет двигаться на 100 км/ч быстрее.
Разумеется, эта логика сохраняется, только когда ускорение и скорость постоянны. Но даже если они меняются, то это для начала вполне неплохая аппроксимация.
Давайте представим это в коде. Начнём с стационарного объекта массой один килограмм и приложим к нему постоянную силу в 10 кН (килоньютонов) и сделаем шаг вперёд, принимая, что один временной шаг равен одной секунде:
Вот каким будет результат:
Как вы видите, на каждом шаге мы знаем и позицию, и скорость объекта. Это и есть численное интегрирование.
Явный метод Эйлера
Вид интегрирования, который мы только что использовали, называется явным методом Эйлера.
Он назван в честь швейцарского математика Леонарда Эйлера, впервые открывшего эту технику.
Интегрирование Эйлера — это простейшая техника численного интегрирования. Она точна на 100% только когда темп изменений в течение шага времени постоянен.
Поскольку в примере выше ускорение постоянно, интегрирование скорости выполняется без ошибок. Однако мы ещё интегрируем и скорость для получения позиции, а скорость увеличивается из-за ускорения. Это значит, что в проинтегрированной позиции возникает ошибка.
Но насколько велика эта ошибка? Давайте выясним!
Существует аналитическое решение движения объекта при постоянном ускорении. Мы можем использовать его, чтобы сравнить численно интегрированную позицию с точным результатом:
Через 10 секунд объект должен был переместиться на 500 метров, но явным метод Эйлера даёт нам результат 450. То есть погрешность в целых 50 метров всего за 10 секунд!
Кажется, что это невероятно плохо, но в играх обычно для шага физики берётся не такой большой временной интервал. На самом деле, физика обычно вычисляется с частотой, примерно равной частоте кадров дисплея.
Если задать шаг dt = 1 ⁄100, то мы получим гораздо лучший результат:
Как вы видите, это достаточно хороший результат, определённо вполне достаточный для игры.
Почему явный метод Эйлера не (всегда) так уж хорош
С достаточно малым шагом времени явный метод Эйлера при постоянном ускорении даёт вполне достойные результаты, но что будет, если ускорение не постоянно?
Хорошим примером переменного ускорения является система пружинного амортизатора.
В этой системе масса присоединена к пружине, и её движение гасится чем-то вроде трения. Существует сила, пропорциональная расстоянию до объекта, которая притягивает его к исходной точке, и сила, пропорциональная скорости объекта, но направленная в противоположном направлении, которая замедляет его.
Здесь ускорение в течение шага времени совершенно точно изменяется, но эта постоянно меняющаяся функция является сочетанием позиции и скорости, которые сами постоянно изменяются за шаг времени.
Вот пример гармонического осциллятора с затуханием. Это хорошо изученная задача, и для него существует аналитическое решение, которое можно использовать для проверки результата численного интегрирования.
Давайте начнём со слабозатухающей системы, в которой масса колеблется рядом с исходной точкой, постепенно замедляясь.
Вот входные параметры системы масса-пружина:
- Масса: 1 килограмм
- Исходная позиция: 1000 метров от исходной точки
- Коэффициент упругости по закону Гука: k = 15
- Коэффициент затухания по закону Гука: b = 0.1
И вот график точного решения:

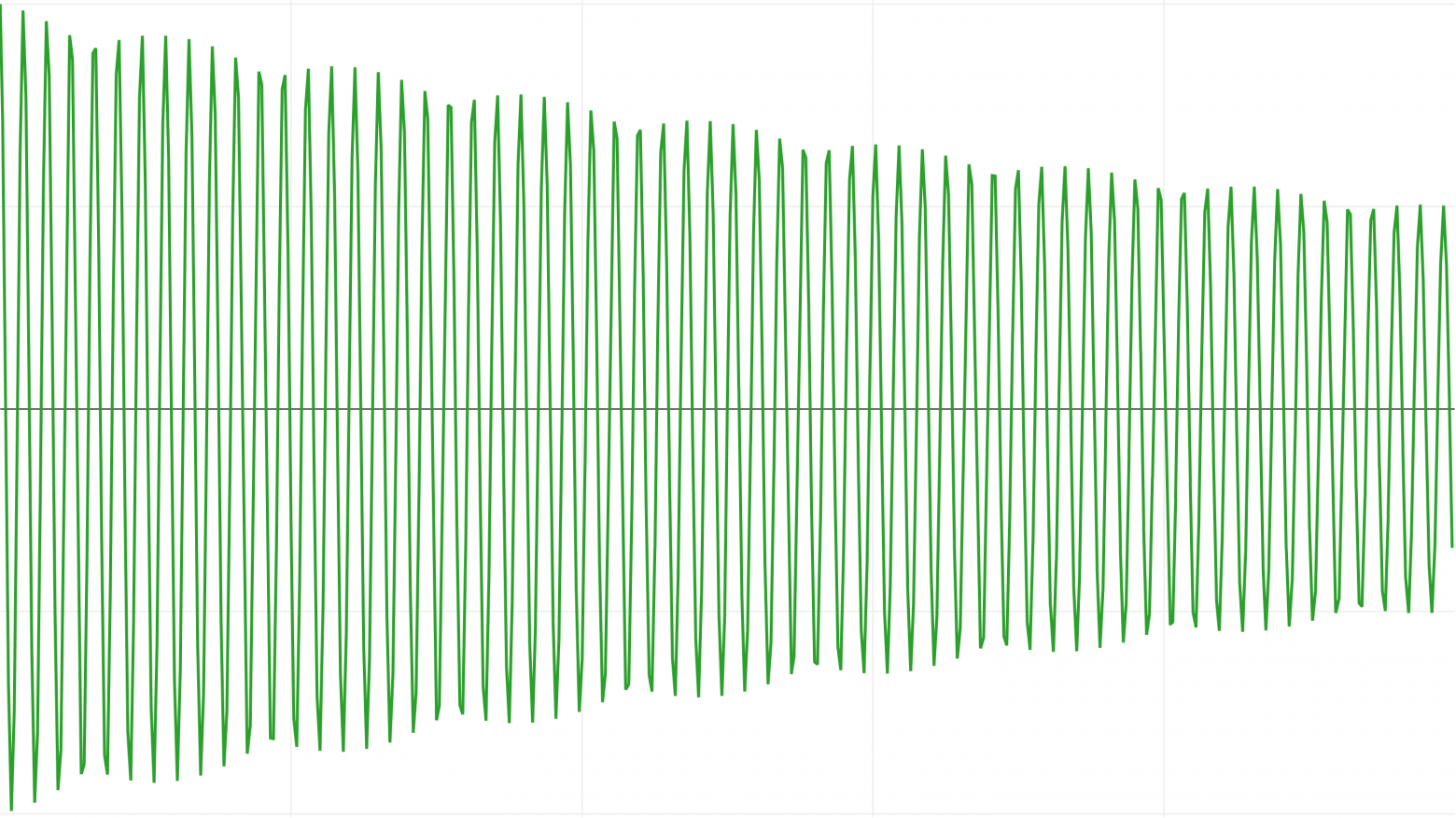
Если для интегрирования этой системы мы применим явный метод Эйлера, то получим следующий результа, который я отмасштабировал по вертикали:
Вместо затухания и сближения с исходной точкой, система со временем набирает энергию!
При интегрировании явным методом Эйлера и с dt= 1 ⁄100 такая система нестабильна.
К сожалению, поскольку мы уже интегрируем с малым шагом времени, то не имеем практичных способов повышения точности. Даже если мы уменьшим шаг времени, то всегда будет коэффициент упругости k, при котором мы получим такое поведение.
Симплектический метод Эйлера
Мы можем рассмотреть ещё один интегратор — симплектический метод Эйлера.
В большинстве коммерческих игровых физических движков используется этот интегратор.
Переход от явного к симплектическому методу Эйлера заключается только в замене:
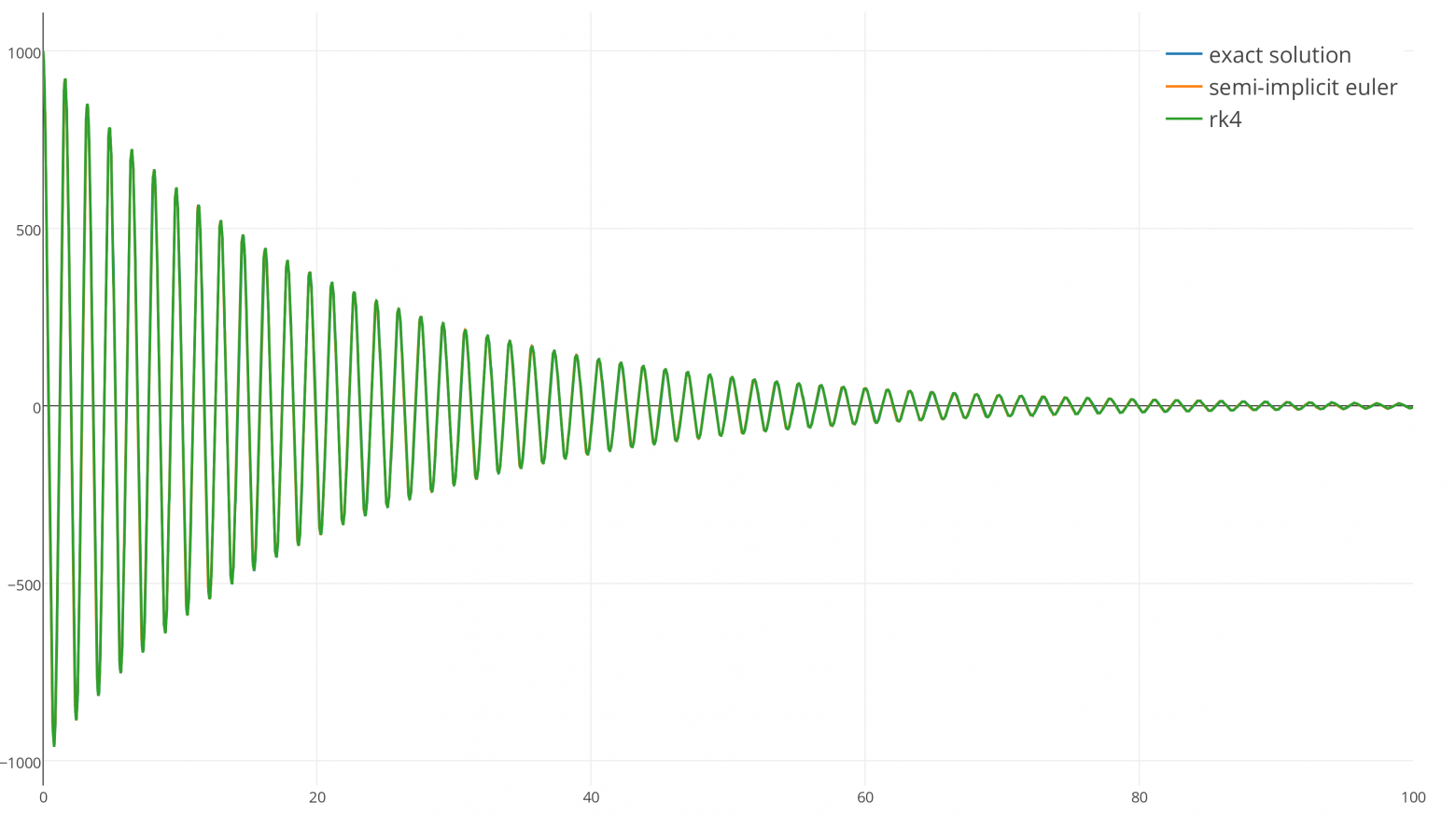
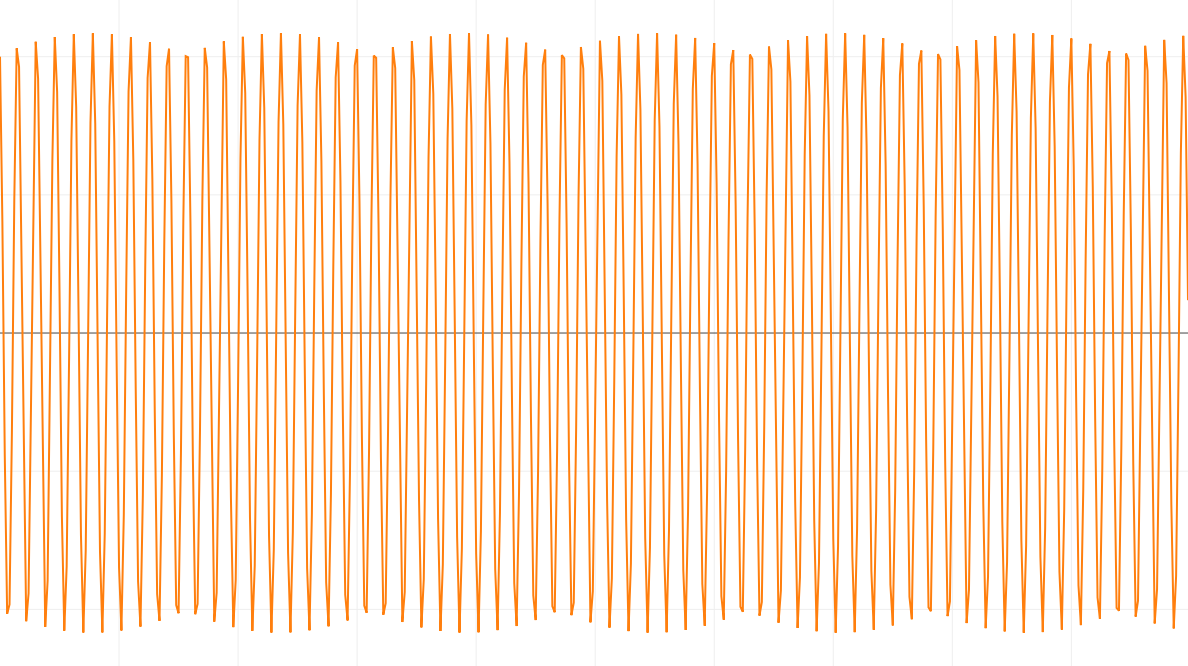
Использование симплектического интегратора Эйлера при dt = 1 ⁄100 для системы пружинного амортизатора даёт стабильный результат, очень близкий к точному решению:
Даже несмотря на то, что симплектический метод Эйлера имеет ту же степень точности, что и явный метод (степень 1), при интегрировании уравнений движения мы получаем намного лучший результат, потому что оно является симплектическим.
Существует множество других методов интегрирования
И теперь нечто совершенно другое.
Неявный метод Эйлера — это способ интегрирования, хорошо подходящий для интегрирования жёстких уравнений, которые при других методах становятся нестабильными. Его недостаток заключается в том, что он требует решения системы уравнений на каждом шаге времени.
Интегрирование Верле обеспечивает бо́льшую точность, чем неявный метод Эйлера, и требует меньше памяти при симуляции большого числа частиц. Это интегратор второй степени, который тоже является симплектическим.
Существует целое семейство интеграторов, называемое методами Рунге-Кутты. На самом деле, явный метод Эйлера считается частью этого семейства, но в него входят интеграторы и более высокого порядка, самым классическим из которых является метод Рунге-Кутты порядка 4 (Runge Kutta order 4) или просто RK4.
Это семейство интеграторов названо в честь открывших их немецких физиков: Карла Рунге и Мартина Кутты.
RK4 — это интегратор четвёртого порядка, то есть накапливаемая ошибка имеет порядок четвёртой производной. Это делает метод очень точным, гораздо более точным, чем явный и неявный методы Эйлера, имеющие только первый порядок.
Но хотя он более точен, нельзя сказать, что RK4 автоматически становится «лучшим» интегратором, или даже что он лучше симплектического метода Эйлера. Всё гораздо сложнее. Тем не менее, это довольно интересный интегратор и его стоит изучить.
Реализация RK4
Существует уже много объяснений математики, используемой в RK4. Например: здесь, здесь и здесь. Я настоятельно рекомендую изучить его выведение и понять, как и почему он работает на математическом уровне. Но я понимаю, что целевая аудитория этой статьи — программисты, а не математики, поэтому мы здесь будем рассматривать только реализацию. Так что давайте приступим.
Прежде чем приступить, давайте зададим состояние объекта как struct в C++, чтобы можно было удобно хранить позицию и скорость в одном месте:
Также нам нужна структура для хранения производных значений состояний:
Теперь нам нужна функция для вычисления состояния физики из t в t+dt с помощью одного набора производных, а после этого для вычисления производных в новом состоянии:
Функция ускорения управляет всей симуляцией. Давайте используем её в системе пружинного амортизатора и вернём ускорение для единичной массы:
То, что нужно здесь записать, разумеется, зависит от симуляции, но необходимо структурировать симуляцию таким образом, чтобы можно было вычислять ускорение внутри этого метода для заданных состояния и времени, в противном случае он не подойдёт для интегратора RK4.
Наконец, мы получаем саму процедуру интегрирования:
Интегратор RK4 делает выборку производной в четырёх точках, чтобы определить кривизну. Заметьте, как производная a используется при вычислении b, b используется при вычислении c, и c для d. Эта передача текущей производной в вычисление следующей и даёт интегратору RK4 его точность.
Важно то, что каждая из этих производных a, b, c и d будет разной, когда темп изменения в этих величинах является функцией времени или функцией самого состояния. Например, в нашей системе пружинного амортизатора ускорение является функцией текущей позиции и скорости, которые меняются в шаге времени.
После вычисления четырёх производных наилучшая общая производная вычисляется как взвешенная сумма, полученная из разложения в ряд Тейлора. Эта комбинированная производная используется для перемещения позиции и скорости вперёд во времени, точно так же, как мы делали это в явном интеграторе Эйлера.
Сравнение симплектического метода Эйлера и RK4
Давайте подвергнем проверке интегратор RK4.
Очевидно, что поскольку он является интегратором более высокого порядка (четвёртый против первого) он наглядно будет более точен, чем симплектический метод Эйлера, правда?
Неправда. Оба интегратора так близки к точному результату, что при таком масштабе почти невозможно найти между ними разницу. Оба интегратора стабильны и очень хорошо повторяют точное решение при dt= 1 ⁄100.
При увеличении видно, что RK4 действительно более точен, чем симплектический метод Эйлера, но стоит ли эта точность сложности и лишнего времени выполнения RK4? Трудно судить.
Давайте постараемся и посмотрим, сможем ли мы найти значительное различие между двумя интеграторами. К сожалению, мы не сможем долго наблюдать за этой системой, потому что она быстро затухает до нуля, поэтому давайте перейдём к простому гармоническому осциллятору, который колеблется бесконечно и без затуханий.
Вот точный результат, к которому мы будем стремиться:

Чтобы усложнить интеграторам задачу, давайте увеличим шаг времени до 0,1 секунды.
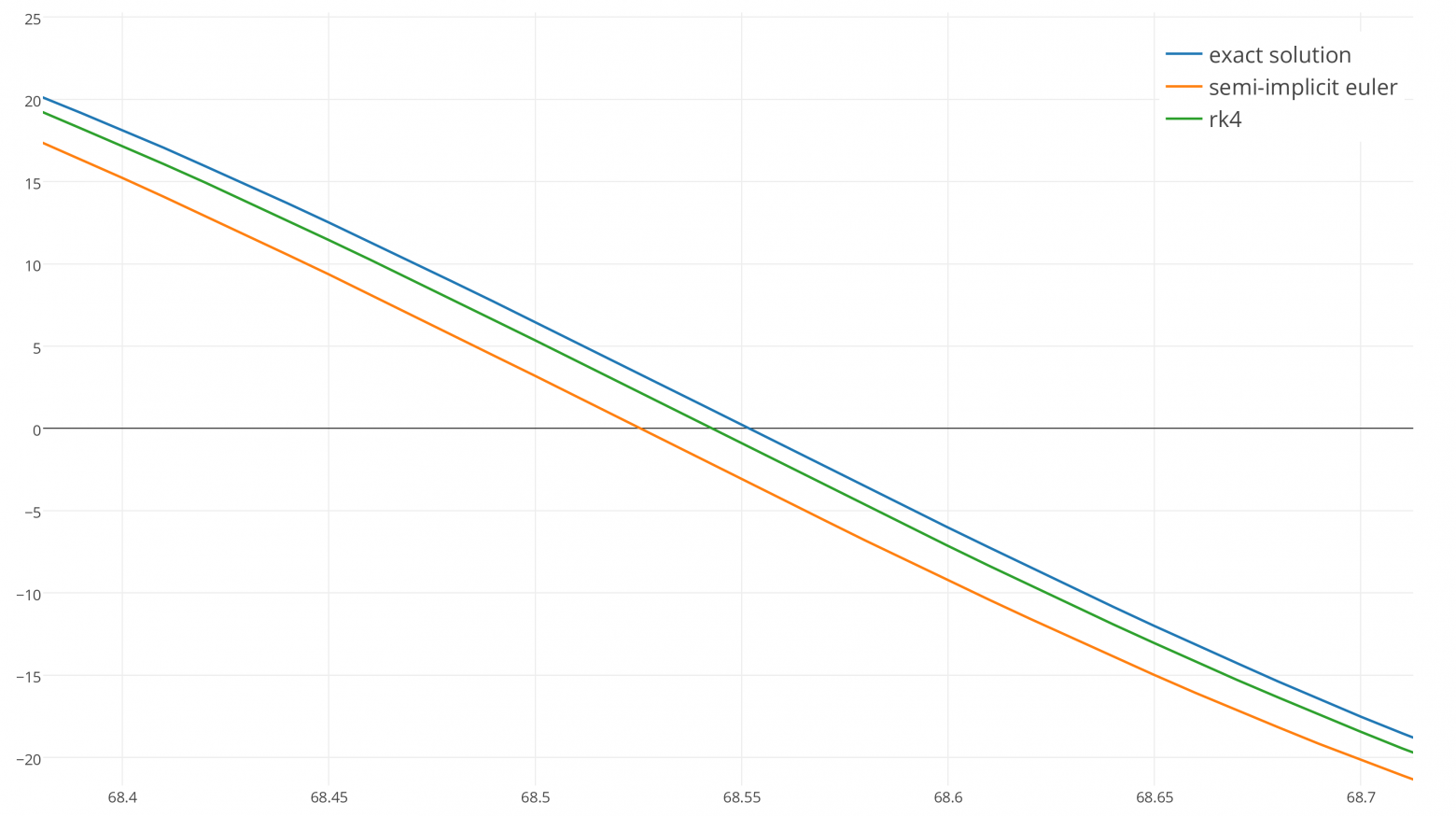
Теперь запустим интеграторы на 90 секунд и увеличим масштаб:
Через 90 секунд симплектический метод Эйлера (оранжевая кривая) сдвинулся по фазе относительно точного решения, потому что его частота немного отличалась, в то время как зелёная кривая RK4 соответствует частоте, но теряет энергию!
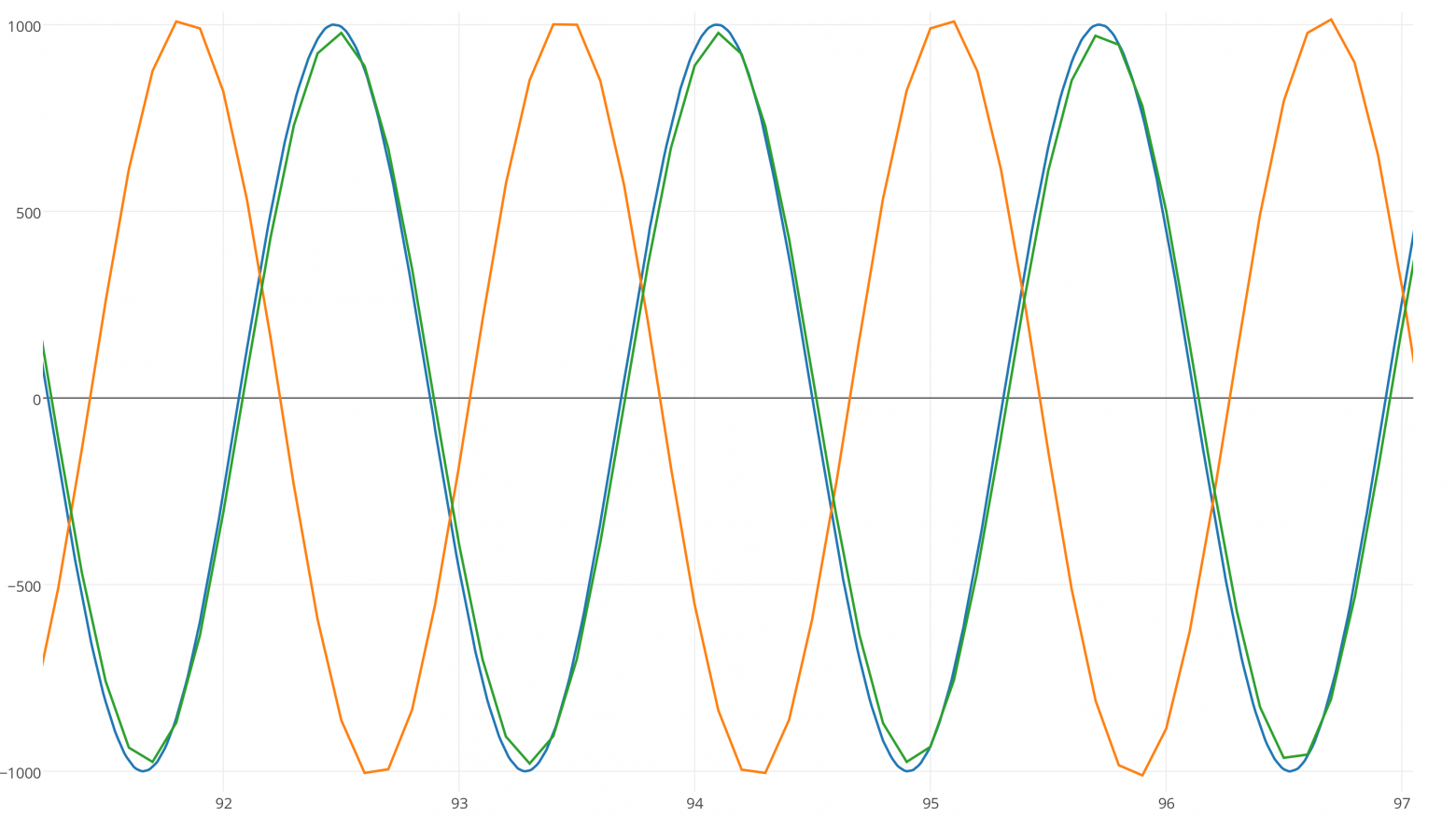
Мы чётко можем это заметить, увеличив шаг времени до 0,25 секунды.
RK4 сохраняет верную частоту, но теряет энергию:
А симплектический метод Эйлера в среднем намного лучше сохраняет энергию:
Но от сдвигается от фазы. Какой интересный результат! Как вы видите, если RK4 имеет более высокий порядок точности, то он не обязательно «лучше». В этом вопросе есть множество нюансов.
Заключение
Мы реализовали три различных интегратора и сравнили результаты.
- Явный метод Эйлера
- Симплектический метод Эйлера
- Метод Рунге-Кутты порядка 4 (RK4)
Так какой же интегратор стоит использовать в игре?
Я рекомендую симплектический метод Эйлера. Он «дёшев» и прост в реализации, гораздо стабильнее явного метода Эйлера и в среднем стремится к сохранению энергии даже при близких к предельным условиях.
Если вам действительно нужна бОльшая точность, чем у симплектического метода Эйлера, я рекомендую посмотреть на симплектические интеграторы более высокого порядка, рассчитанные на гамильтоновы системы. Таким образом вы изучите более современные техники интегрирования высокого порядка, которые лучше подходят для симуляций, чем RK4.
И наконец, если вы всё ещё пишете в игре такое:
То потратьте секунду и замените эти строки на:
РОЛЬ НАЧАЛЬНЫХ УСЛОВИЙ
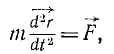
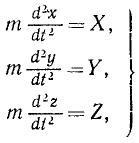
Векторное уравнение движения материальной точки можно записать в координатной форме:
 , ,  , ,  . . | (2.6) |
Эти три скалярных уравнения, эквивалентные одному векторному уравнению, являются дифференциальными, то есть в них входят вторые производные от координат по времени  , поэтому их недостаточно для однозначного описания движения материальной точки. Для однозначного описания движения точки к уравнениям движения надо присоединить дополнительные данные, определяющие значения шести числовых постоянных, получающихся при решении уравнений (2.6), в которые входят вторые производные. В качестве таковых обычно берут значения pадиус-вектора и скорости в момент времени
, поэтому их недостаточно для однозначного описания движения материальной точки. Для однозначного описания движения точки к уравнениям движения надо присоединить дополнительные данные, определяющие значения шести числовых постоянных, получающихся при решении уравнений (2.6), в которые входят вторые производные. В качестве таковых обычно берут значения pадиус-вектора и скорости в момент времени  . Эти значения называются начальными условиями.
. Эти значения называются начальными условиями.
Поясним этот вопрос на примере движения материальной точки под действием силы тяжести  . Уравнение движения в этом случае запишется следующим образом:
. Уравнение движения в этом случае запишется следующим образом:
 . . | (2.7) |
Это уравнение эквивалентно двум уравнениям:
 ,
,  .
.
Легко проверить, что этим уравнения удовлетворяют следующие решения:
 , ,  , , | (2.8) |
где  и
и  – произвольные постоянные векторы. Убедиться в этом можно, если взять производные от
– произвольные постоянные векторы. Убедиться в этом можно, если взять производные от  и
и  по времени. Решение (2.8) называется общим решением уравнения (2.7). Общее решение – это, в сущности, не одно решение, а целое семейство решений, зависящих от двух произвольных векторных постоянных
по времени. Решение (2.8) называется общим решением уравнения (2.7). Общее решение – это, в сущности, не одно решение, а целое семейство решений, зависящих от двух произвольных векторных постоянных  и . Придавая этим постоянным какие-либо конкретные значения, мы выделяем из этого семейства определенное частное решение. Постоянная – начальная скорость движущейся точки, – ее радиус-вектор в начальный момент времени. Величины и определяются начальными условиями. В зависимости от их значений движения могут сильно отличаться друг от друга: тело может двигаться вверх или вниз по прямой линии, может описывать параболу, достигая или не достигая ее вершины. Получается довольно разнообразный класс движений. Заслуга Ньютона и состоит в том, что он подметил, что все многообразие движений может быть описано единой формулой, не содержащей никаких произвольных постоянных, если от положений и скоростей материальной точки перейти к ее ускорению.
и . Придавая этим постоянным какие-либо конкретные значения, мы выделяем из этого семейства определенное частное решение. Постоянная – начальная скорость движущейся точки, – ее радиус-вектор в начальный момент времени. Величины и определяются начальными условиями. В зависимости от их значений движения могут сильно отличаться друг от друга: тело может двигаться вверх или вниз по прямой линии, может описывать параболу, достигая или не достигая ее вершины. Получается довольно разнообразный класс движений. Заслуга Ньютона и состоит в том, что он подметил, что все многообразие движений может быть описано единой формулой, не содержащей никаких произвольных постоянных, если от положений и скоростей материальной точки перейти к ее ускорению.
ТРЕТИЙ ЗАКОН НЬЮТОНА
Третий закон Ньютона формулируется следующим образом: силы взаимодействия двух материальных точек равны по величине, противоположно направлены и действуют вдоль прямой, соединяющей эти материальные точки.
 .
.
 |
Одну из сил,  или
или  , согласно Ньютону иногда называют действием, а другую – противодействием. Третий закон Ньютона иначе называют законом действия и противодействия. «Если кто нажимает пальцем на камень, – писал Ньютон, – то и палец его также нажимается камнем. Если лошадь тащит камень, привязанный к канату, то и обратно (если можно так выразиться) она с равным усилием оттягивается к камню. ». Всякому действию соответствует равное и противоположно направленное противодействие (рис.2.7). Следует, однако, заметить, что «действие» по своей природе ничем не отличается от «противодействия». Так, тяжелое тело, лежащее на столе, давит на стол, испытывая со стороны стола противоположно направленное противодействие. Действие – давление камня на стол – обусловлено деформацией камня, противодействие – давление стола на камень – обусловлено деформацией стола. В основе подразделения сил на «действующие» и «противодействующие» лежит представление об активных телах, производящих действие, и пассивных телах, оказывающих противодействие. Так, если мы поднимаем груз за нитку, то активным телом, производящим действие, будем мы сами, а пассивным телом, оказывающим противодействие, будет груз. Однако подразделение тел на активные и пассивные можно провести далеко не всегда. Например, когда Солнце и планета притягиваются друг к другу силами всемирного тяготения, то в этом взаимодействии они выступают совершенно равноправно, и нельзя указать, какое из взаимодействующих тел является активным, а какое – пассивным. Какую из сил,
, согласно Ньютону иногда называют действием, а другую – противодействием. Третий закон Ньютона иначе называют законом действия и противодействия. «Если кто нажимает пальцем на камень, – писал Ньютон, – то и палец его также нажимается камнем. Если лошадь тащит камень, привязанный к канату, то и обратно (если можно так выразиться) она с равным усилием оттягивается к камню. ». Всякому действию соответствует равное и противоположно направленное противодействие (рис.2.7). Следует, однако, заметить, что «действие» по своей природе ничем не отличается от «противодействия». Так, тяжелое тело, лежащее на столе, давит на стол, испытывая со стороны стола противоположно направленное противодействие. Действие – давление камня на стол – обусловлено деформацией камня, противодействие – давление стола на камень – обусловлено деформацией стола. В основе подразделения сил на «действующие» и «противодействующие» лежит представление об активных телах, производящих действие, и пассивных телах, оказывающих противодействие. Так, если мы поднимаем груз за нитку, то активным телом, производящим действие, будем мы сами, а пассивным телом, оказывающим противодействие, будет груз. Однако подразделение тел на активные и пассивные можно провести далеко не всегда. Например, когда Солнце и планета притягиваются друг к другу силами всемирного тяготения, то в этом взаимодействии они выступают совершенно равноправно, и нельзя указать, какое из взаимодействующих тел является активным, а какое – пассивным. Какую из сил,  или
или  , назвать действием, а какую – противодействием, – это в большинстве случаев вопрос соглашения.
, назвать действием, а какую – противодействием, – это в большинстве случаев вопрос соглашения.
Обосновывая равенство сил действия и противодействия, Ньютон писал: «Относительно притяжений дело может быть изложено вкратце следующим образом: между двумя взаимно притягивающимися телами надо вообразить помещённым какое-либо препятствие, мешающее их сближению. Если бы одно из тел А притягивалось бы телом В сильнее, нежели тело В притягивается телом А, то препятствие испытывало бы со стороны тела А большее давление, нежели со стороны тела В и, следовательно, не осталось бы в равновесии. Преобладающее давление вызвало бы движение системы, состоящей из двух тел и препятствия, в сторону тела В, и в свободном пространстве эта система, двигаясь ускоренно, ушла бы в бесконечность. Такое заключение нелепо и противоречит первому закону, по которому система должна бы оставаться в своём состоянии покоя или равномерного и прямолинейного движения. Отсюда следует, что оба тела давят на препятствие с равными силами, а значит, и притягиваются взаимно с таковыми же».
В основу третьего закона Ньютона положено ньютоновское допущение о мгновенном распространении взаимодействия, которое носит название принципа дальнодействия в классической механике. Согласно этому принципу взаимодействие между телами распространяется в пространстве с бесконечно большой скоростью. Иначе говоря, если изменить состояние одного тела, то сразу же можно обнаружить хотя бы очень слабое изменение во взаимодействующих с ним телах, как бы далеко они не находились.
Сейчас мы знаем, что в действительности это не так – существует конечная максимальная скорость распространения взаимодействий, которая равна скорости света в вакууме. Поэтому третий закон Ньютона (а также и второй) имеет определенные границы применимости.
Примеры
 | Баскетболист, забивший мяч, завис на кольце. Противодействующей силе упругости, действующей на спортсмена со стороны кольца, является сила упругой деформации кольца, действующая на кольцо со стороны спортсмена и приложенная к кольцу. Противодействующей силе тяжести, действующей на спортсмена, будет сила гравитационного притяжения Земли баскетболистом, приложенная к Земле |
 | Сила, с которой самосвал действует на троллейбус при столкновении, равна силе, с которой троллейбус действует на самосвал. При этом последствия действия этих сил для самосвала и троллейбуса могут сильно отличаться. Но ведь в третьем законе Ньютона речь идет только о равенстве сил действия и противодействия, но ничего не говорится о последствиях этого взаимодействия |
 | Сила, действующая на спортсмена со стороны строп парашюта, равна по величине силе, действующей на стропы со стороны спортсмена |
 | Сила, с которой спортсмен действует на штангу, и сила, с которой штанга действует на спортсмена, равны по величине и противоположны по направлению. Эти силы приложены к разным телам. Сила, действующая на штангу со стороны спортсмена, уравновешена силой тяжести штанги. Сила, действующая на спортсмена со стороны штанги, в сумме с силой тяжести и силой нормальной реакции опоры, действующими на спортсмена, дают ноль. В результате и штанга, и спортсмен в рассматриваемый момент времени покоятся |
 | На спортсмена и на катер действуют со стороны соединяющего их каната силы натяжения, равные по величине и противоположные по направлению. Под действием результирующих сил, действующих на катер и спортсмена, эти тела могут двигаться с разными скоростями, ускорениями и в разных направлениях |
2.7. ВТОРОЙ ЗАКОН НЬЮТОНА
ДЛЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК.
ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА
Тела, образующие механическую систему, могут взаимодействовать как между собой, так и с телами, не принадлежащими данной системе. В соответствии с этим силы, действующие на тела системы, можно разделить на внутренние и внешние. Внутренними называются силы, с которыми на данное тело воздействуют остальные тела системы; внешними – силы, обусловленные воздействием тел, не принадлежащих системе. В случае если внешние силы отсутствуют, система называется замкнутой или изолированной.
Во Вселенной не может быть полностью изолированных систем, поскольку все тела взаимодействуют между собой. Однако при определенных условиях можно тело считать в достаточной степени изолированным. Например, материальное тело в некоторой области космического пространства, достаточно удаленной от массивных космических тел, ведет себя как изолированная система. В других случаях движение системы в определенных направлениях можно рассматривать как движение замкнутой системы, хотя в целом система таковой не является.
Третий закон Ньютона мы сформулировали для замкнутой системы, состоящей из двух материальных точек. Постулируем теперь его справедливость для системы из произвольного числа материальных точек. Пусть  – сила, с которой k-я точка системы действует на i-ю, а
– сила, с которой k-я точка системы действует на i-ю, а  – сила, с которой i-я точка действует на k-ю. Третий закон Ньютона утверждает, что обе эти силы направлены вдоль прямой, соединяющей взаимодействующие точки, причем
– сила, с которой i-я точка действует на k-ю. Третий закон Ньютона утверждает, что обе эти силы направлены вдоль прямой, соединяющей взаимодействующие точки, причем
 .
.
Это соотношение позволяет выполнить переход от механики отдельной материальной точки к механике системы материальных точек.
Пусть в системе из N взаимодействующих частиц кроме внутренних сил  на
на  -ю частицу действуют внешние силы, результирующая которых равна
-ю частицу действуют внешние силы, результирующая которых равна  . Запишем уравнение движение для каждой из N частиц, входящих в систему:
. Запишем уравнение движение для каждой из N частиц, входящих в систему:

Сложим правые и левые части этих уравнений. Так как  , то
, то
 .
.
Заметим, что импульс системы материальных точек является величиной аддитивной, то есть импульс системы материальных точек равен сумме импульсов отдельных точек, входящих в систему, независимо от того, взаимодействуют они между собой или нет:
 ,
,
где  – импульс -й частицы. Тогда
– импульс -й частицы. Тогда
 . . | (2.9) |
Согласно полученному уравнению, импульс системы материальных точек может меняться только под действием внешних сил. Внутренние силы исключаются третьим законом Ньютона, поэтому внутренние силы не могут изменить импульс системы. Уравнение (2.9) является обобщением уравнения движения для одной материальной точки.
Таким образом, производная по времени от импульса системы материальных точек равна геометрической сумме всех внешних сил, действующих на систему.
2.8. ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
В любой системе частиц имеется одна замечательная точка, называемая центром масс, которая обладает рядом интересных и важных свойств. Ее положение относительно начала данной системы координат характеризуется радиус-вектором  , определяемым как
, определяемым как
 , , | (2.10) |
где  – масса и радиус-вектор
– масса и радиус-вектор  -й частицы,
-й частицы,  – масса всей системы,
– масса всей системы,  – полное число частиц в системе. Если взять производную по времени от обеих частей уравнения и умножить обе части на
– полное число частиц в системе. Если взять производную по времени от обеих частей уравнения и умножить обе части на  , то получится:
, то получится:

 ,
,
где  – скорость движения центра масс системы. Таким образом, импульс системы материальных точек равен произведению массы системы на скорость ее центра масс:
– скорость движения центра масс системы. Таким образом, импульс системы материальных точек равен произведению массы системы на скорость ее центра масс:
 .
.
Подставив это выражение в (2.9), получим:
 . . | (2.11) |
Отсюда следует, что центр масс системы материальных точек движется как материальная точка, масса которой равна суммарной массе всей системы, а действующая сила – геометрической сумме всех внешних сил, действующих на все точки системы. Этот результат называется теоремой о движении центра масс системы материальных точек. Уравнение (2.11) по форме совпадает с основным уравнением динамики материальной точки и является его обобщением на систему материальных точек: ускорение системы как целого прямо пропорционально результирующей всех внешних сил и обратно пропорционально суммарной массе системы.
Если система замкнута, то  и уравнение (2.11) переходит в
и уравнение (2.11) переходит в  , следовательно,
, следовательно,  . Таким образом, центр масс замкнутой системы движется прямолинейно и равномерно или покоится.
. Таким образом, центр масс замкнутой системы движется прямолинейно и равномерно или покоится.
Примеры
В безвоздушном пространстве снаряд, выпущенный из пушки под некоторым углом к горизонту, будет двигаться по параболе под действием силы тяжести. Если в какой-либо момент времени снаряд разорвется на мелкие осколки, то эти осколки под действием внутренних сил будут разлетаться в разные стороны. Однако центр масс осколков и газов, образовавшихся при взрыве, будет продолжать свое движение по параболической траектории, как если бы никакого взрыва не было. Действительно, результирующая внешняя сила, действующая на продукты распада, равна силе тяжести, действовавшей на неразорвавшийся снаряд.
 | При взрыве праздничной ракеты центр масс продуктов распада в течение некоторого времени продолжает двигаться по траектории, по которой двигалась бы ракета, если бы взрыва не произошло |
2.9. ПРИНЦИП ОТНОСИТЕЛЬНОСТИ ГАЛИЛЕЯ.
ПРЕОБРАЗОВАНИЯ ГАЛИЛЕЯ
| «Открытие спутников Юпитера, фаз Венеры, солнечных пятен и т.д. потребовало лишь наличие телескопа и некоторого трудолюбия, но нужен был необыкновенный гений, чтобы открыть закон природы в таких явлениях, которые всегда пребывали перед глазами, но объяснение которых, тем не менее, всегда ускользало от изысканий философов». Ж.Л. Лагранж |
 |
Галилео Галилей (Galileo Galilei), 1564–1642
Галилео Галилей – великий итальянский физик, механик и астроном. Родился в Пизе в 1564 г. в тот самый день, когда умер Микеланджело. Галилей по праву считается одним из основоположников точного естествознания. Ряд открытий Галилея и некоторые его взгляды имели непосредственное отношение к движению небесных тел. В 1632 г. вышла его книга «Диалог о двух главнейших системах мира – Птолемеевой и Коперниковой», в которой Галилей в доступной форме изложил свои взгляды на систему мира Коперника. А годом позже Галилей был вызван на суд римской инквизиции, и там коленопреклоненный был вынужден поклясться, что отрекается от идеи о неподвижном Солнце и движущейся Земле. Он был взят под домашний арест. Однако Галилей не был сломлен. Страдая от болезней и переживаний, он все же нашел в себе силы и мужество, чтобы написать новую книгу «Беседы и математические доказательства, касающиеся двух новых отраслей наук». Это был самый значительный труд Галилея, в котором сконцентрировались плоды всех его научных поисков. Эта книга была издана в Лейдене в 1636 г.
Заслуга Галилея заключалась в том, что он опроверг ошибочное положение динамики Аристотеля и заложил основы современной механики, выдвинул идею об относительности движения, установил законы инерции, свободного падения и движения тел по наклонной плоскости. Галилей первым направил телескоп в небо, открыл горы на Луне, четыре спутника Юпитера, фазы у Венеры и пятна на Солнце.
Прожив 78 лет, совершенно потеряв зрение, Галилей умер 8 января 1642 г., того самого года, в котором на Земле суждено было появиться Ньютону.
Физики любой эпохи будут с благодарностью и уважением вспоминать Галилея, указавшего на то, что новые идеи надо искать «в великой книге – природе», опираясь только на факты.
В 1632 г. в книге «Диалог о двух главнейших системах мира – Птолемеевой и Коперниковой» Галилей обосновал принцип относительности, ставший одним из первых основных принципов физики. Согласно этому принципу все ИСО по своим механическим свойствам эквивалентны друг другу. Это значит, что никакими механическими опытами, проводимыми внутри данной ИСО, нельзя установить, покоится эта система или движется равномерно и прямолинейно. Этот принцип является обобщением опыта и подтверждается всем многообразием приложений механики Ньютона к движению тел, скорости которых значительно меньше скорости света.
Все сказанное достаточно ясно свидетельствует об исключительности свойств ИСО, в силу чего именно эти системы должны, как правило, использоваться для изучения механических явлений.
 |
Найдем формулы преобразования координат при переходе от одной ИСО к другой. Допустим, что система отсчета S инерциальна. Рассмотрим вторую систему отсчета S’, движущуюся относительно первой поступательно с постоянной скоростью  (рис. 2.8). Свяжем с каждой системой отсчета декартову систему координат. Пусть известно движение точки в одной из этих систем, например, в системе S, то есть известна зависимость координат точки от времени. Как найти движение той же точки в системе отсчета S’? Задача сводится к нахождению формул, выражающих координаты движущейся точки в системе отсчета S’ через ее координаты в системе отсчета S в один и тот же момент времени. Начало координат и направление координатных осей можно выбрать произвольно как в системе отсчета S, так и в системе отсчета S’. Для простоты можно принять, что координатные оси
(рис. 2.8). Свяжем с каждой системой отсчета декартову систему координат. Пусть известно движение точки в одной из этих систем, например, в системе S, то есть известна зависимость координат точки от времени. Как найти движение той же точки в системе отсчета S’? Задача сводится к нахождению формул, выражающих координаты движущейся точки в системе отсчета S’ через ее координаты в системе отсчета S в один и тот же момент времени. Начало координат и направление координатных осей можно выбрать произвольно как в системе отсчета S, так и в системе отсчета S’. Для простоты можно принять, что координатные оси  системы S соответственно параллельны координатным осям
системы S соответственно параллельны координатным осям  системы S’ и что в начальный момент начало системы координат, связанной с системой отсчета S, совпадает с началом системы координат, связанной с системой отсчета S’. Кроме того, предположим, что скорость параллельна оси
системы S’ и что в начальный момент начало системы координат, связанной с системой отсчета S, совпадает с началом системы координат, связанной с системой отсчета S’. Кроме того, предположим, что скорость параллельна оси  . При этих условиях ось
. При этих условиях ось  будет все время совпадать с осью .
будет все время совпадать с осью .
Пусть в момент времени  движущаяся точка находится в положении M. За время
движущаяся точка находится в положении M. За время  начало координат S’ переходит из точки О в положение
начало координат S’ переходит из точки О в положение  , причем, так как
, причем, так как  то
то
 , , | (2.12) |
где и  – радиус-векторы движущейся точки соответственно в системах отсчета S и
– радиус-векторы движущейся точки соответственно в системах отсчета S и 
Спроецируем соотношение (2.12) на оси координат:
 | (2.13) |
Формулы обратного преобразования имеют вид

или в координатной форме
 | (2.14) |
Формулы (2.12–2.14) и дают решение поставленной задачи. Они называются преобразованиями Галилея. Мы присоединили к формулам преобразования координат дополнительное выражение  , чтобы явно отметить, что время в механике Ньютона считается абсолютным (то есть не меняется при переходе от одной системы отсчета к другой) и поэтому не преобразуется.
, чтобы явно отметить, что время в механике Ньютона считается абсолютным (то есть не меняется при переходе от одной системы отсчета к другой) и поэтому не преобразуется.
С точки зрения «здравого смысла» преобразования Галилея кажутся очевидными. Однако в основе вывода лежит предположение механики Ньютона об абсолютности длин и промежутков времени. Абсолютность времени явно отмечена в уравнении , при выводе остальных формул использовалось предположение об абсолютности длин. Действительно, формулы (2.12–2.14) были бы очевидными, если и измерялись бы в одной системе отсчета. Мы же измеряем их в разных системах отсчета. По этой причине без предположения об абсолютности расстояний и промежутков времени нельзя обойтись. Релятивистская физика отказалась от такой абсолютности.
Чтобы получить формулы сложения скоростей в нерелятивистской механике, возьмем производную по времени от (2.12):

 , , | (2.15) |
где – скорость точки в системе отсчета S, а  – в системе отсчета
– в системе отсчета  . Эта формула выражает закон сложения скоростей в классической механике.
. Эта формула выражает закон сложения скоростей в классической механике.
Возьмем производную по времени от (2.15), тогда получим
 | (2.16) |
где  – ускорение точки в системе отсчета S,
– ускорение точки в системе отсчета S,  – в системе отсчета
– в системе отсчета  Таким образом, ускорение точки в обеих системах отсчета одинаково. Говорят, что ускорение инвариантно относительно преобразований Галилея.
Таким образом, ускорение точки в обеих системах отсчета одинаково. Говорят, что ускорение инвариантно относительно преобразований Галилея.
По определению ИСО свободная материальная точка движется в системе отсчета S без ускорения. Формула (2.16) показывает, что движение данной материальной точки в системе отсчета будет также неускоренным. Следовательно, – также инерциальная система отсчета. Таким образом, система отсчета, движущаяся относительно инерциальной системы отсчета прямолинейно и равномерно, также является инерциальной системой. Следовательно, если существует хотя бы одна ИСО, то существует и бесконечное множество ИСО, движущихся относительно друг друга равномерно и прямолинейно.
Сила в классической механике может зависеть от разностей координат, разностей скоростей взаимодействующих точек и от времени. Поэтому, как видно из преобразований Галилея, она не меняется при переходе от одной системы отсчета к другой. Отсюда следует, что уравнение, выражающее второй закон Ньютона, остается неизменным при переходе от одной ИСО к другой. Такие уравнения называются инвариантными. Таким образом, уравнения механики Ньютона инвариантны относительно преобразований Галилея. Это утверждение и составляет содержание принципа относительности Галилея. Равноправие ИСО дает возможность в каждом конкретном случае подбирать систему отсчета, наиболее удобную для решения рассматриваемой задачи.
Итак, принцип относительности Галилея выражает полное равноправие всех ИСО. Однако означает ли это, что одно и то же движение выглядит одинаково во всех ИСО? Конечно, нет! Движение тела, свалившегося с полки равномерно движущегося вагона, является прямолинейным, если его рассматривать относительно вагона. Но то же самое движение происходит по параболе в системе отсчета, связанной с полотном железной дороги, хотя законы механики Ньютона одинаковы в обеих системах отсчета. Движения выглядят по-разному, так как для описания движения к уравнению движения необходимо добавить начальные условия, то есть задать начальное положение тела и его начальную скорость, а они будут различными в разных системах отсчета.
РАБОТА И ЭНЕРГИЯ
Зная законы действия сил на систему частиц и состояние системы частиц (координаты и скорости всех частиц) в некоторый начальный момент времени, можно с помощью уравнений движения предсказать ее дальнейшее поведение, то есть найти состояние системы в любой момент времени. Однако детальное рассмотрение поведения системы с помощью уравнений движения часто бывает связано с большими математическими трудностями. А в тех случаях, когда законы действия сил неизвестны, такой подход оказывается в принципе неосуществимым. Поэтому возникает вопрос: нет ли каких-либо общих принципов, которые позволили бы иначе подойти к решению задачи?
Оказывается, такие принципы есть. Это законы сохранения. Законы сохранения позволяют рассмотреть общие свойства движения без решения уравнений движения и подробной информации о развитии процессов во времени. Законы сохранения были установлены опытным путем, как обобщение огромного количества экспериментальных фактов. В механике имеют значение три закона сохранения: закон сохранения энергии, закон сохранения импульса, закон сохранения момента импульса. Эти законы относятся к числу тех фундаментальных принципов физики, значение которых трудно переоценить. Их роль особенно возросла после того, как выяснилось, что они далеко выходят за рамки механики и представляют собой универсальные законы природы. Во всяком случае, до сих пор не обнаружено ни одного явления, где бы эти законы нарушались.
Открыв возможность другого подхода к рассмотрению различных механических явлений, законы сохранения стали мощным и эффективным инструментом исследования, которым повседневно пользуются физики. Эта важнейшая роль законов сохранения как инструмента исследования обусловлена следующими причинами.
Законы сохранения не зависят ни от траекторий движения, ни от характера действующих сил. Поэтому они позволяют получить ряд общих и существенных заключений о свойствах различных механических процессов, не вникая в детальное рассмотрение их с помощью уравнений движения.
Так как законы сохранения не зависят от характера действующих сил, то их можно использовать даже тогда, когда силы неизвестны. В этих случаях законы сохранения являются единственным и незаменимым инструментом исследования.
Даже в тех случаях, когда силы в точности известны, законы сохранения следует использовать при решении многих задач о движении частиц. Хотя все эти задачи могут быть решены с помощью уравнений движения, привлечение законов сохранения очень часто позволяет получить решение наиболее простым путем, избавляя нас от утомительных математических расчетов. Поэтому при решении новых задач обычно принято придерживаться следующего порядка: прежде всего, применяют законы сохранения, и только убедившись, что этого недостаточно, привлекают для решения задачи уравнения движения.
Две основные задачи динамики точки в теоретической механике
Содержание:
Две основные задачи динамики точки:
Используя дифференциальные уравнения движения материальной точки в. той или другой системе координат, можно решать две основные задачи динамики точки.
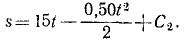
Первая задача
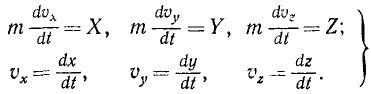
Зная массу точки и ее закон движения, можно найти действующую на точку силу. Действительно, если, например, заданы уравнения движения точки в декартовой системе координат

то проекции силы на оси координат определяются из дифференциальных уравнений движения точки (9), т. е.

Зная проекции силы на координатные оси, легко определить модуль силы и косинусы углов силы с осями координат.
Пример 1. Точка  , имеющая массу
, имеющая массу  (рис. 5), движется в плоскости
(рис. 5), движется в плоскости  так, что уравнениями ее движения являются
так, что уравнениями ее движения являются

где  ,
,  ,
,  — постоянные положительные величины;
— постоянные положительные величины;  — время.
— время.
Определить силу, под действием которой точка совершает это движение.
Решение. Найдем уравнение траектории точки в координатной форме, исключая время из уравнений движения:

Траекторией точки является эллипс с полуосями  и
и  .
.
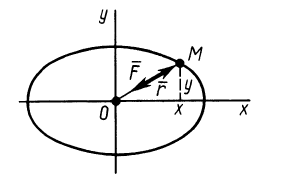
Рис. 5
На основании дифференциальных уравнений движения точки (10)

или, если ввести координаты движущейся точки,

где  —радиус-вектор движущейся точки. Косинусы углов силы
—радиус-вектор движущейся точки. Косинусы углов силы  с осями координат
с осями координат

Отсюда можно заключить, что сила  имеет направление, противоположное радиусу-вектору
имеет направление, противоположное радиусу-вектору  . Окончательно
. Окончательно
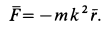
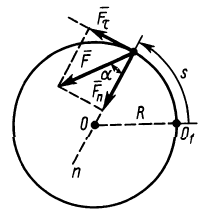
Рис. 6
Пример 2. Точка  , имеющая массу
, имеющая массу  (рис. 6), движется из состояния покоя по окружности радиусом
(рис. 6), движется из состояния покоя по окружности радиусом  с постоянным касательным ускорением
с постоянным касательным ускорением  . Определить действующую на точку силу в момент, соответствующий пройденному точкой по траектории расстоянию
. Определить действующую на точку силу в момент, соответствующий пройденному точкой по траектории расстоянию  .
.
Решение. Применяя дифференциальные уравнения движения точки в проекциях на естественные оси, имеем:

Так как движение происходит с постоянным касательным ускорением  без начальной скорости, то
без начальной скорости, то


В момент, когда  и, следовательно,
и, следовательно,  ,
,

Тангенс угла  между радиусом окружности и силой
между радиусом окружности и силой 

Из рассмотрения первой задачи динамики точки видно, что по заданной массе точки и уравнениям ее движения сила полностью определяется как по величине, так и по направлению.
Вторая задача
По заданной массе и действующей на точку силе необходимо определить движение этой точки. Рассмотрим решение этой задачи в прямоугольной декартовой системе координат. В общем случае сила  , а следовательно, и ее проекции на координатные оси могут зависеть от времени, координат движущейся точки, ее скорости, ускорения и т. д. Для простоты ограничимся случаем зависимости силы и ее проекций на оси координат от времени, координат и скорости. Дифференциальные уравнения движения точки (9) имеют вид
, а следовательно, и ее проекции на координатные оси могут зависеть от времени, координат движущейся точки, ее скорости, ускорения и т. д. Для простоты ограничимся случаем зависимости силы и ее проекций на оси координат от времени, координат и скорости. Дифференциальные уравнения движения точки (9) имеют вид

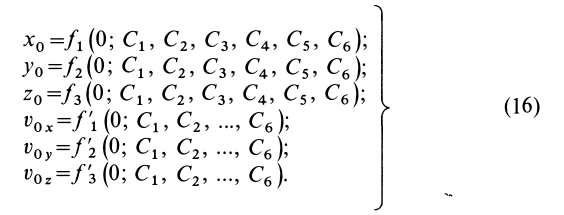
Для нахождения уравнений движения точки в декартовых координатах необходимо проинтегрировать систему трех обыкновенных дифференциальных уравнений второго порядка. Из теории обыкновенных дифференциальных уравнений известно, что решение одного дифференциального уравнения второго порядка содержит две произвольные постоянные. Для случая системы трех обыкновенных дифференциальных уравнений второго порядка имеется шесть произвольных постоянных:  .
.
Каждая из координат  движущейся точки после интегрирования системы уравнений (9) зависит от времени t и всех шести произвольных постоянных, т. е.
движущейся точки после интегрирования системы уравнений (9) зависит от времени t и всех шести произвольных постоянных, т. е.

Если продифференцировать уравнения (13) по времени, то определяются проекции скорости точки на координатные оси:

Таким образом, задание силы не определяет конкретного движения материальной точки, а выделяет целый класс движений, характеризующийся шестью произвольными постоянными. Действующая сила определяет только ускорение движущейся точки, а скорость и положение точки на траектории могут зависеть еще от скорости, которая сообщена точке в начальный момент, и от начального положения точки. Так, например, материальная точка, двигаясь вблизи поверхности Земли под действием силы тяжести, имеет ускорение  , если не учитывать сопротивление воздуха. Но точка будет иметь различные скорости и положение в пространстве в один и тот же момент времени и различную форму траектории в зависимости от того, из какой точки пространства началось движение и с какой по величине и направлению начальной скоростью.
, если не учитывать сопротивление воздуха. Но точка будет иметь различные скорости и положение в пространстве в один и тот же момент времени и различную форму траектории в зависимости от того, из какой точки пространства началось движение и с какой по величине и направлению начальной скоростью.
Для выделения конкретного вида движения материальной точки надо дополнительно задать условия, позволяющие определить произвольные постоянные, которых в общем случае будет шесть. В качестве таких условий обычно задают так называемые начальные условия, т.е. в какой-то определенный момент времени, например при  (рис. 7), задают координаты движущейся точки
(рис. 7), задают координаты движущейся точки  и проекции ее скорости
и проекции ее скорости  :
:

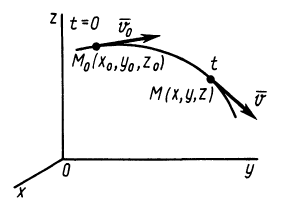
Рис. 7
Используя эти начальные условия и формулы (13) и (14), получаем шесть следующих уравнений для определения шести произвольных постоянных:
Если система уравнений (16) удовлетворяет условиям разрешимости, то из нее можно определить все шесть произвольных постоянных.
Начальные условия в форме (15) определяют единственное решение системы дифференциальных уравнений (9) при соблюдении соответствующих условий теории дифференциальных уравнений. Условия в других формах, как например, задание двух точек, через которые должна проходить траектория движущейся точки, могут дать или несколько решений, удовлетворяющих этих условиям, или не дать ни одного решения.
При движении точки в плоскости  имеется два дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные. Постоянные определяются из начальных условий
имеется два дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные. Постоянные определяются из начальных условий

В случае прямолинейного движения точки имеется только одно дифференциальное уравнение и в его решение входят две произвольные постоянные. Для их определения необходимо задать начальные условия:

Задача интегрирования системы дифференциальных уравнений (9′) при заданных начальных условиях в общем случае является довольно трудной. Даже в простейшем случае прямолинейного движения, когда имеется только одно дифференциальное уравнение, его решение удается выразить точно в квадратурах лишь при определенной зависимости силы от времени  , координаты
, координаты  и скорости
и скорости  . Поэтому важно определение таких соотношений из системы уравнений (9′), которые являются следствиями этой системы и в которые входят производные от координат точки только первого порядка. Такие соотношения, например, в виде
. Поэтому важно определение таких соотношений из системы уравнений (9′), которые являются следствиями этой системы и в которые входят производные от координат точки только первого порядка. Такие соотношения, например, в виде  называют первыми интегралами системы дифференциальных уравнений (9′).
называют первыми интегралами системы дифференциальных уравнений (9′).
Если из системы (9′) удается найти три независимых первых интеграла, то задача интегрирования упрощается, так как вместо интегрирования системы дифференциальных уравнений второго порядка достаточно проинтегрировать систему трех дифференциальных уравнений первого порядка, которую представляют эти первые интегралы.
В дальнейшем будет рассмотрен способ получения первых интегралов дифференциальных уравнений движения точки из так называемых общих теорем динамики в некоторых частных случаях движения точки.
Для выяснения особенностей решения второй основной задачи динамики, имеющей прикладное значение, рассмотрим ее решение для случая как прямолинейного, так и криволинейного движения материальной точки.
Две основные задачи динамики
Динамика имеет две основные задачи:
- по заданному движению определить действующие силы
- по заданным силам определить движение
Прямая и обратная задачи динамики
В динамике изучают механическое движение в связи с силами, приложенными к движущимся объектам. Следовательно, перед динамикой стоят две основные задачи:
- по движению материального объекта (точки, твердого тела или системы точек) определить силы, производящие, данное движение. Эту задачу называют прямой, или первой основной задачей динамики;
- вторая задача — обратная по отношению к первой, поэтому ее называют обратной, или второй основной задачей динамики: даны силы, действующие на данный материальный объект; требуется определить движение этого объекта под действием данных сил.
Наиболее просты с механической стороны эти задачи для одной материальной точки, хотя и здесь встречаются большие трудности математического характера.
Пусть точка M массы m находится под действием сил, представленных в мгновение t векторами  ,
, , . ,
, . ,  или их равнодействующей
или их равнодействующей  . Согласно основному закону динамики ускорение, получаемое точкой M от действия сил, направлено по силе и пропорционально ей:
. Согласно основному закону динамики ускорение, получаемое точкой M от действия сил, направлено по силе и пропорционально ей:
 (123)
(123)
Если решают первую основную задачу динамики точки и движение точки определено в векторной форме, т. е. дан радиус-вектор  как некоторая векторная функция времени t:
как некоторая векторная функция времени t:
 (54)
(54)
то надо определить по (57) ускорение  , выражающееся второй производной от радиуса-вектора точки по времени t, и умножить его на массу т точки. Тогда мы получим следующее выражение основного закона динамики:
, выражающееся второй производной от радиуса-вектора точки по времени t, и умножить его на массу т точки. Тогда мы получим следующее выражение основного закона динамики:
 (125)
(125)
где правая часть даст нам искомую силу.
Если же решают вторую основную задачу динамики точки и задан вектор силы, но требуется определить радиус-вектор как функцию (54) от времени, то для решения задачи нужно интегрировать уравнение (125).
Значительно проще решать такие задачи не в векторной, а в координатной форме.
Все основные теоремы динамики точки могут быть выведены из трех дифференциальных уравнений движения материальной точки в прямоугольных координатах: mx = X; mу = Y; mz =Z
Дифференциальные уравнения движения точки в прямоугольных координатах
Пусть движение точки M задано в прямоугольных координатах кинематическими уравнениями
x = x (t), y = y (t), z = z (t). (58)
Преобразуем выражение (123) основного закона динамики; для этого определим проекции на оси координат ускорения  и силы
и силы  . Направляющие косинусы (67) ускорения являются вместе с тем и направляющими косинусами силы, так как направление ускорения совпадает с направлением силы. Умножая величины (123) на
. Направляющие косинусы (67) ускорения являются вместе с тем и направляющими косинусами силы, так как направление ускорения совпадает с направлением силы. Умножая величины (123) на  , получим: max = F cos α.
, получим: max = F cos α.
Но согласно (65)  . Подставляем это значение и, пользуясь для проекции силы на ось абсцисс (и аналогично для проекций на оси у и z) знакомым нам по статике обозначением, получим
. Подставляем это значение и, пользуясь для проекции силы на ось абсцисс (и аналогично для проекций на оси у и z) знакомым нам по статике обозначением, получим
 (126)
(126)
или, если обозначать вторые производные по времени двумя точками,
mx = X; mу = Y; mz =Z (126 / )
Система трех дифференциальных уравнений (126) второго порядка эквивалентна системе шести дифференциальных уравнений первого порядка:
 (127)
(127)
Уравнения (126) или (127) называют дифференциальными уравнениями движения материальной точки в прямоугольных координатах.
Из уравнений движения мы выведем все теоремы динамики. Они дают возможность решить и обе основные задачи динамики точки. В прямой задаче, когда кинематические уравнения движения (58) даны, решение сводится к дифференцированию этих уравнений: умножив на массу вторую производную от координаты но времени, получим проекцию силы. В обратной задаче, когда заданы проекции силы X, Y и Z, а нужно определить координаты точки х, у и z как функции времени (58), решение сводится к интегрированию трех совместных дифференциальных уравнений, где независимым переменным является время.
Три совместных дифференциальных уравнения (126) второго порядка определяют координаты х, у и z в функции времени t. Если движущаяся точка M совершенно свободна, то приложенные к ней силы могут быть функциями ее координат х, у и z, проекций ее скорости х, у и z и времени t:
Проинтегрировать их в общем виде невозможно, но при некоторых видах функции F эти интегралы могут быть получены. В очень многих случаях вычисления возможно проводить на интегрирующих машинах.
При интегрировании дифференциальных уравнений движения материальной точки появляется шесть постоянных интеграции, которые при решении каждой задачи должны быть определены из начальных условий
Постоянные интегрирования
Общие интегралы дифференциальных уравнений движения материальной точки содержат шесть постоянных интеграции: C1, C2, C3, C4, C5, C6. Эти постоянные величины отнюдь не являются произвольными, и в каждой частной задаче, при решении которой приходится интегрировать дифференциальные уравнения движения, постоянные интеграции должны быть определены из начальных условий. Если заданы положение и скорость движущейся точки для какого-либо мгновения t=t0 (t0 может быть равным или не равным нулю), то нужно определить постоянные C1, C2, C3, C4, C5 и C6 таким образом, чтобы при t=t0 координаты х, у и z получили заданные значения х0, у0 и z0 и производные
х, у и z — заданные значения υ0x, υ0y, и υ0z.
Допускают, что данным начальным условиям соответствует только одно движение, конечно, при заданной массе m и силе F. В справедливости этого положения мы -убедимся на всех примерах, которые будем рассматривать, хотя это положение имеет и математическое доказательство. Поэтому, если мы нашли какое-либо движение точки M, удовлетворяющее уравнениям (126) и начальным данным, то, следовательно, мы определили именно то движение, которое искали.
Задача №1
Точка массы т кг движется по винтовой линии согласно кинематическим уравнениям движения: х=r cos kt, у =r sin kt, z=ut, где x, у, z и r выражены в метрах, а t — в секундах; известно, что r, k и и постоянны. Определить величину и направление силы в функции расстояния.
Решение. Задача заключается в определении силы по заданному движению, т. е. является прямой задачей динамики. Условие выражено в физической системе единиц (СИ). При решении будем выражать длину в метрах, мaccy- в килограммах и время — в секундах.
Определим по (126) проекции силы на координатные оси, для чего сначала дважды продифференцируем заданные текущие координаты точек:
х=rk 2 cos kt, у =rk 2 sin kt, z=0
Умножая на т полученные значения проекций ускорения, определим в ньютонах проекции силы:
X= — mk 2 x, Y = — mk 2 y, Z=0

Направляющие косинусы силы найдем по (6):

Ответ. Сила постоянна по величине и перпендикулярна к оси Oz.
Задача №2
Из орудия, стоящего на берегу на высоте 30 ,и над уровнем моря (рис. 160), выпущен снаряд массы m кг со скоростью 1000 м/сек под углом 30° к плоскости горизонта и под углом 60° к линии берега. Пренебрегая сопротивлением воздуха, определить точку, в которой упадет снаряд.
Решение. Единственной силой, действующей па снаряд во время полета, является его вес G = mg. Пo данной силе и по начальным данным (местоположение орудия и начальная скорость снаряда) надо определить движение снаряда и место его падения в морс. Задача относится к обратным задачам динамики. Для ее решения надо составить и проинтегрировать дифференциальные уравнения движения снаряда. Задачу будем решать в единицах СИ. Построим систему координат, взяв за начало точку О, находящуюся под орудием на уровне моря. Ось Ox направим горизонтально, перпендикулярно к берегу в сторону моря, ось Oy— вдоль берега, а ось Oz—вертикально вверх.
Для составления дифференциальных уравнений движения надо знать проекции действующей силы на оси координат. На снаряд после вылета его из орудия действовала только одна сила тяжести G = mg, направленная по вертикали вниз. Проекции действующей силы:
Дифференциальные уравнения движения снаряда напишем в виде (127):

Сокращаем на m, разделяем переменные:
откуда, интегрируя, находим:
Чтобы определить постоянные интеграции, подставим вместо t нуль, а вместо проекций скорости-их начальные значения υox, υoy, и υoz, соответствующие мгновению t = 0. Получим
Таким образом, три первые постоянные интеграции в нашей задаче равны проекциям начальной скорости снаряда. Чтобы определить числовые значения этих проекций, надо знать направляющие косинусы начальной скорости. Снаряд был выпущен под углом 30° к плоскости горизонта, следовательно, угол ур> 0 начальной скорости с вертикалью равен 60°. Угол βυ,0, по условию задачи, тоже равен 60 o , cos υ,0 определим из равенства единице Суммы квадратов направляющих косинусов:

Теперь нетрудно определить и проекции начальной скорости:

Мы получили числовые значения постоянных интеграции:

Подставляя эти значения постоянных в уравнения и выражая проекции скоростей по (63), получим три новых дифференциальных уравнения:

Разделив переменные и проинтегрировав, получим

Для определения C4, C5 и C6 подставим и в эти уравнения вместо t его частное значение 0, а вместо х, у и z —их частные значения x0, у0 и z0:
При выбранной нами системе координат имеем x0 =0; y0 = 0; z0 = + 30м, следовательно, C4 = 0; C5=0; C6=+30.
Подставляя эти значения в уравнения, полученные после второго интегрирования, найдем кинематические уравнения движения снаряда:

Чтобы определить положение точки, в которой снаряд упадет в море, надо знать продолжительность полета снаряда. Для этого приравняем нулю аппликату z, так как в мгновение, когда снаряд коснется моря, он будет находиться в плоскости хОу. Из уравнения
4,905t 2 — 500t-30 = 0
находим два значения: t=101,6 сек и t=—0,06 сек. Второе значение отбрасываем а первое подставляем в кинематические уравнения движения. Находим ответ.
Ответ. x = 71 831 м — 71,8 км; у = 50 800 м — 50,8 км; z = 0.
Из этого примера видно, что движение точки зависит не только от действующих сил, но и от начальных данных. Если бы начальная скорость или начальные координаты были иными, то и движение снаряда отличалось бы от полученного. Оно по-прежнему было бы равномерным но горизонтали и равнопеременным по вертикали; траекторией снаряда оставалась бы парабола, но она была бы иной и иначе расположенной; иной была бы и точка попадания. Полученные значения постоянных C1, C2, . C6 определены для данной задачи, и при этих значениях постоянных может быть только одно найденное нами решение. Эти постоянные величины вовсе не являются произвольными. Постоянные интеграции, являясь первоначальными значениями переменных, придают решению какой-либо задачи механики всю ту общность, какую она способна иметь.
Вариации постоянных интеграции. Пусть движение какой-либо точки M массы m происходит под действием силы  . Составив и проинтегрировав дифференциальные уравнения движения точки, определим постоянные интеграции C1, C2, . C6. Тогда, подставляя в полученные уравнения частные значения времени t, мы можем определить положение точки M во всякое данное мгновение. Пусть, например, в мгновение t1 координаты точки M равны x1, y1, z1. Если мы дадим постоянным интеграции бесконечно малые приращения δC1, δC2, . произвольного знака и произвольной величины, называемые вариациями, то положение точки M в то же мгновение t1, но при измененных постоянных интеграции C1 + δC1, C2 + δC2, . будет иным. Точка M при неизменившемся времени получит бесконечно малое отклонение, координаты ее получат некоторые бесконечно малые приращения δx1, δy1, δz1, называемые вариациями координат точки, при движении, определяемом величинами C1, C2, . постоянных интеграции.
. Составив и проинтегрировав дифференциальные уравнения движения точки, определим постоянные интеграции C1, C2, . C6. Тогда, подставляя в полученные уравнения частные значения времени t, мы можем определить положение точки M во всякое данное мгновение. Пусть, например, в мгновение t1 координаты точки M равны x1, y1, z1. Если мы дадим постоянным интеграции бесконечно малые приращения δC1, δC2, . произвольного знака и произвольной величины, называемые вариациями, то положение точки M в то же мгновение t1, но при измененных постоянных интеграции C1 + δC1, C2 + δC2, . будет иным. Точка M при неизменившемся времени получит бесконечно малое отклонение, координаты ее получат некоторые бесконечно малые приращения δx1, δy1, δz1, называемые вариациями координат точки, при движении, определяемом величинами C1, C2, . постоянных интеграции.
Задача №3
Движение точки весом 2 Г выражается уравнениями x= 3cos2πt см; y=4sinπt см, где t выражено в секундах. Определить проекции силы, действующей на точку, в зависимости от ее координат.
Решение. Задача относится к прямым задачам динамики: по данному движению точки надо определить действующую силу. Для ее решения продифференцируем дважды кинематические уравнения движения точки и, умножив на m найденные х и у, получим X и Y.
Условие дано в технической системе единиц, и в этой задаче примем L в см, F в Г и T сек. Кинематические уравнения движения известны. Дифференцируя дважды, находим
х — 4π 2 3 cos 2πt = — 4π 2 x;
у = —4π 2 sin πt = — π 2 у.
Умножая массу  на проекции ускорения, найдем проекции силы в граммах. Чтсбы перевести их в ньютоны, надо умножить число граммов на 0,00981.
на проекции ускорения, найдем проекции силы в граммах. Чтсбы перевести их в ньютоны, надо умножить число граммов на 0,00981.
Решим теперь эту же задачу в физической системе единиц. Принимать за основные единицы метр, килограмм и секунду в этой задаче нецелесообразно. Выразим L в см, M в г и T в сек.
В условии задачи дан вес точки G = 2 Г. Следовательно, ее масса m = 2 г. Умножая проекции ускорения на массу, выраженную в граммах, получим проекции силы в динах:
X = — 8π 2 x = — 78,88x [дин];
Y = — 2π 2 y = — 19,72y [дин].
Чтобы выразить их в ньютонах, надо число дин поделить на 100000.
Ответ. X =— 0,08χ Г = —78,88x дин = —0.0007888x н;
Y = —0,02x Г =— 19,72y дин = —0,0001972y н.
Обратим внимание на одно обстоятельство, которое легко усмотреть в только что решенной задаче. Определяя силу по заданному движению материальной точки, мы нашли, что движение произведено силой, являющейся функцией координат точки. Но мы могли бы выразить силу и как функцию времени. В самом деле, продифференцировав дважды кинематические уравнения движения и умножив вторые производные на m, найдем
X = — 12rnπ 2 cos 2πt; Y = —4rnπ 2 sin πt.
Так одно и то же движение может совершаться под действием различно выраженной силы.
Из этого же примера видно, что если точка движется в одной плоскости, то, приняв эту плоскость за плоскость хОу, можно описать движение точки системой первых двух дифференциальных уравнений движения (126′); третье же дифференциальное уравнение становится лишним.
Задача №4
Найти плоскую траекторию точки M массы m, притягиваемой к неподвижному центру О с силой, пропорциональной расстоянию r и равной k 2 mr, при следующих начальных данных:
Решение. Задача относится к обратным задачам динамики: по заданной силе определить движение. Точка M описывает плоскую траекторию, и нам понадобятся только два уравнения движения.
Если в какое-либо мгновение t точка M имела координаты х и у и находилась от центра на расстоянии  (рис. 161), то проекции силы на оси координат:
(рис. 161), то проекции силы на оси координат:


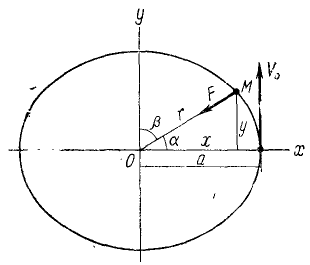
Рис. 161
Дифференциальными уравнениями движения точки являются:

Сократим на т и умножим первое из уравнений на υxdt=dx, а второе—на υydt = dy:

Интегрируем и умножаем на 2:

Для определения постоянных интеграции C1 и C2 подставляем в эти уравнения вместо переменных величин их начальные значения:

Значения постоянных вносим в уравнения, одновременно выражая υx и υy по (63):

Извлекаем квадратные корни, разделяем переменные н интегрируем: 
Для определения постоянных интеграции C3 и C4 подставляем в эти уравнения вместо переменных величин t, х и у их начальные значения:
Эти значения постоянных интеграции вносим в уравнения:


Мы получили кинематические уравнения движения (58) точки в декартовых координатах. Чтобы определить траекторию, надо из них исключить время. Возводя в квадрат и складывая, получаем уравнение траектории
Ответ. Эллипс с полуосями a и  .
.
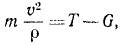
В еще более частном случае, когда сила имеет постоянное направление, а начальная скорость направлена по силе или равна нулю, движение точки прямолинейно. Направив ось Ox по этой траектории, мы обойдемся первым из уравнений (126), которое и нужно интегрировать, чтобы получить закон (58 , ) искомого движения точки. При этом нельзя забывать, что под X мы понимаем не силу, а ее проекцию F cos a, которая в данном случае по величине равна модулю силы. Если α = 0, то сила направлена в сторону положительной оси Ох, и тогда Х>0. Если же α = π, то сила направлена в сторону отрицательного направления оси Ох, тогда X 2 υ 2 .
Решение. Предположим, что тело начинает падать из начального положения О, и направим вниз из точки О ось Ох. Так как движение прямолинейное, то для его определения достаточно первого уравнения (126). На падающее тело действуют две силы: 1) постоянная сила G = mg, направленная в положительную сторону оси Ох, и 2) переменная сила R = mgk 2 υ 2 , являющаяся функцией скорости; она возрастает пропорционально квадрату скорости и направлена против скорости, а следовательно, против положительного направления оси Ох. Имеем

Перепишем это уравнение, сократив его на m:
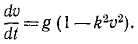
Из этого уравнения видно, что падение не может быть равноускоренным, что по мере возрастания скорости сила сопротивления увеличивается, правая часть уравнения уменьшается и ускорение стремится к нулю.
Чтобы взять интеграл, перемножим соответственно левые и правые части этого уравнения и следующего выражения:




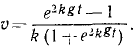
Это уравнение позволяет определить скорость падающего тела во всякое данное мгновение t. Оно уточняет известную формулу υ=gt, так как здесь учтено и сопротивление воздуха.
Ответ. 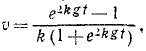
Движение точки можно описать в проекциях на оси естественного трехгранника двумя уравнениями:
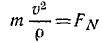
Дифференциальные уравнения движения материальной точки в форме Эйлера. В кинематике мы изучали три способа определения движения точки: 1) векторный, 2) в прямоугольных координатах, 3) естественный. Соответственно и в динамике мы можем определить движение точки по заданным силам (или силы по заданному движению) векторным уравнением (125), в проекциях на прямоугольные оси — уравнениями (126), а также естественными уравнениями движения. Из многих форм уравнений движения эти три применяют наиболее часто.
Проецируя ускорение на оси естественного трехгранника, мы нашли (см. § 23), что проекции ускорения на касательную аN, на главную нормаль αv и на бинормаль ab выражаются следующими формулами:

и вместо трех составляющих полное ускорение имеет только две. Но сила всегда направлена по ускорению точки, а следовательно, проецируя силу на оси естественного трехгранника, мы и здесь получим только две составляющие (FT — на касательную и FN— на главную нормаль) и определим движение точки только двумя уравнениями:
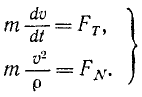 (128)
(128)
Задача №6
Горнолыжник в конце склона развил скорость 54 км/ч, после чего свободно скользил по горизонтальному прямолинейному участку пути. Определить длину и время свободного скольжения, если коэффициент трения лыж по снегу f’ = 0,051.
Решение. В задаче примем единицы СИ; тогда вес лыжника, выраженный в ньютонах, G = 9,81 ∙m, где m — его .масса в кг. Задача является обратной задачей динамики, так как требуется определить движение по заданной силе Fгp— f’G. Достаточно одного первого из уравнений (128), потому что движение прямолинейное. Проекция силы имеет отрицательный знак, так как сила трения направлена против скорости, а скорость направлена в положительном направлении (в сторону возрастания расстояния): .
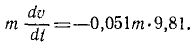
Сокращаем на m и разделяем переменные:


Чтобы определить постоянную C1, подставим вместо t нуль, а вместо υ—начальное значение скорости — = 15 м/сек:
= 15 м/сек:
Подставляя это значение C1 в уравнение, полученное после интегрирования, и заменяя υ по (53), получим новое дифференциальное уравнение:
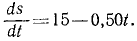
Разделим переменные и проинтегрируем:
В начальное мгновение лыжник не прошел еще никакого расстояния по горизонтальному участку, а потому C2 = 0. Время скольжения до остановки определим, положив в уравнении, полученном для скорости, 
15 — 0,50t=0, откуда t = 30.
Подставляя это значение t в последнее уравнение, найдем длину свободного скольжения.
Ответ. Время скольжения 30 сек, длина 225 м.
Задача №7
Маятник Борда для определения ускорения свободно падающих тел представляет собой латунный шарик массой 200 г, подвешенный на очень тонкой проволоке длиной 100 см. При качании шарик в наинизшем положении имеет скорость 8 см/сек. Определить натяжение проволоки в ее нижнем конце при наинизшем положении маятника.
Решение. В задаче применена физическая система единиц. Примем L в см, M в г, T в сек.
Задача относится к прямым задачам динамики. Чтобы по данному движению латунного шарика, принимаемого за материальную точку, определить действующую силу, напишем второе из естественных уравнений движения материальной точки (128). В наинизшем положении на шарик действует сила натяжения проволоки, проекцию которой T будем считать положительной, так как она направлена внутрь траектории, и сила тяжести G = 200 . 981 дин, проекцию которой будем считать отрицательной:
или, подставляя числовые значения,
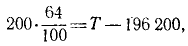
откуда получаем ответ.
Ответ. T = 196 328 дин = 1,96328 н.
Движение точки в плоскости можно описать двумя уравнениями в полярных координатах.
Уравнения движения точки в полярных координатах
В ряде задач бывает удобно исследовать движение точки в полярных координатах. Примем без доказательства, что проекция ускорения точки на полярный радиус-вектор равна (r — rφ 2 ), а на перпендикулярное направление равна (rφ + 2rφ). Помножив на массу эти проекции ускорения точки и приравняв проекциям силы, напишем дифференциальные уравнения движения точки в полярных координатах:
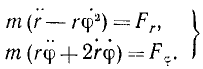 (129)
(129)

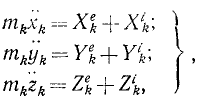
где mk—масса k-й точки, xk, yk и zk-проекции ее ускорения, a Xk, Yk и Zk—проекции равнодействующей всех сил, приложенных к этой точке (k = 1, 2, 3, . n).
Далеко не всегда действующие силы бывают известны. Обычно остаются неизвестными внутренние силы. Для вывода некоторых общих теорем динамики и при решении некоторых частных задач бывает удобным выделить внутренние силы уже при написании дифференциальных уравнений движения.
Рассмотрим сначала одну из материальных точек системы, например точку с индексом 1  , а сложив все внутренние, получим равнодействующую внутренних сил
, а сложив все внутренние, получим равнодействующую внутренних сил  . Проекции этих сил обозначим
. Проекции этих сил обозначим  ,
, ,
,  и
и  ,
, ,
,  .
.
Аналогично поступим с силами, приложенными к остальным точкам, и заменим в написанных выше уравнениях проекции равнодействующей Xk суммой  , то же сделаем по двум другим осям. Тогда дифференциальные уравнения примут вид:
, то же сделаем по двум другим осям. Тогда дифференциальные уравнения примут вид:
 (130)
(130)
Следовательно, движение свободной механической системы, состоящей из n материальных точек, определяется системой 3n дифференциальных уравнений второго порядка.
Если система не свободна, а на нее наложены связи, выражающие некоторую зависимость между координатами точек механической системы, то бывает возможным сократить число дифференциальных уравнений движения, о чем будет подробнее сказано в § 52 и § 53.
В ряде случаев оказывается целесообразным разделить все силы, действующие на материальные точки механической системы на две категории по иному признаку, а именно на активные силы и реакции связей. Как уже было сказано, реакции связей часто зависят от движения системы и не могут быть найдены, пока не определено движение системы. Обозначая проекции равнодействующей всех активных сил, действующих на k-ю точку,  ,
,  и
и  , а проекции равнодействующей всех реакций связей, приложенных к k-й точке,
, а проекции равнодействующей всех реакций связей, приложенных к k-й точке,  ,
,  и
и  , получим:
, получим:
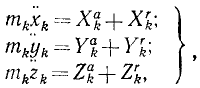 (130′)
(130′)
Во всем вашем курсе (если это специально не оговорено) рассмотрены только свободные механические системы и механические системы с идеальными связями. Понятие идеальных связей нам уже встречалось в статике (см. § 4) и будет уточнено в динамике (см. § 51).
В дальнейшем из дифференциальных уравнений (130) и (130′) мы выведем общие теоремы динамики таких материальных систем.
Решение многих проблем по динамике механических систем сопряжено с большими трудностями математического характера. Интегрирующие машины в очень многих случаях дают возможность преодолеть эти трудности.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Сложение движение твердого тела
- Кинематика сплошной среды
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://megaobuchalka.ru/1/26085.html
http://www.evkova.org/dve-osnovnyie-zadachi-dinamiki-tochki-v-teoreticheskoj-mehanike