Метод итераций
Правила ввода функции
- Примеры
 ≡ x^2/(1+x)
≡ x^2/(1+x)
cos 2 (2x+π) ≡ (cos(2*x+pi))^2≡ x+(x-1)^(2/3)

На рис.1а, 1б в окрестности корня |φ′(x)| 1, то процесс итерации может быть расходящимся (см. рис.2).
Достаточные условия сходимости метода итерации
Процесс нахождения нулей функции методом итераций состоит из следующих этапов:
- Получить шаблон с омощью этого сервиса.
- Уточнить интервалы в ячейках B2 , B3 .
- Копировать строки итераций до требуемой точности (столбец D ).
Примечание: столбец A — номер итерации, столбец B — корень уравнения X , столбец C — значение функции F(X) , столбец D — точность eps .
Итерационные методы решения системы линейных алгебраических уравнений
В данной статье мы расскажем общие сведения об итерационных методах решения СЛАУ, познакомим с методом Зейделя и Якоби, а также приведем примеры решения систем линейных уравнений при помощи данных методов.
Общие сведения об итерационных методах или методе простой итерации
Метод итерации — это численный и приближенный метод решения СЛАУ.
Суть: нахождение по приближённому значению величины следующего приближения, которое является более точным. Метод позволяет получить значения корней системы с заданной точностью в виде предела последовательности некоторых векторов (итерационный процесс). Характер сходимости и сам факт сходимости метода зависит от выбора начального приближения корня x 0 .
Рассмотрим систему A x = b .
Чтобы применить итерационный метод, необходимо привести систему к эквивалентному виду x = B x + d . Затем выбираем начальное приближение к решению СЛАУ x ( 0 ) = ( x 1 0 , x 2 0 , . . . x m 0 ) и находим последовательность приближений к корню.
Для сходимости итерационного процесса является достаточным заданное условие В 1 . Окончание итерации зависит от того, какой итерационный метод применили.
Метод Якоби
Метод Якоби — один из наиболее простых методов приведения системы матрицы к виду, удобному для итерации: из 1-го уравнения матрицы выражаем неизвестное x 1 , из 2-го выражаем неизвестное x 2 и т.д.
Результатом служит матрица В , в которой на главной диагонали находятся нулевые элементы, а все остальные вычисляются по формуле:
b i j = — a i j / a i i , i , j = 1 , 2 . . . , n
Элементы (компоненты) вектора d вычисляются по следующей формуле:
d i = b i / a i i , i = 1 , 2 , . . . , n
Расчетная формула метода простой итерации:
x ( n + 1 ) = B x ( x ) + d
Матричная запись (координатная):
x i ( n + 1 ) = b i 1 x n 1 + b i 2 x ( n ) 2 + . . . + b
Критерий окончания в методе Якоби:
x ( n + 1 ) — x ( n ) ε 1 , где ε 1 = 1 — B B ε
В случае если B 1 / 2 , то можно применить более простой критерий окончания итераций:
x ( n + 1 ) — x ( n ) ε
Решить СЛАУ методом Якоби:
10 x 1 + x 2 — x 3 = 11 x 1 + 10 x 2 — x 3 = 10 — x 1 + x 2 + 10 x 3 = 10
Необходимо решить систему с показателем точности ε = 10 — 3 .
Приводим СЛАУ к удобному виду для итерации:
x 1 = — 0 , 1 x 2 + 0 , 1 x 3 + 1 , 1 x 2 = — 0 , 1 x 1 + 0 , 1 x 3 + 1 x 3 = 0 , 1 x 1 — 0 , 1 x 2 + 1
Выбираем начальное приближение, например: x ( 0 ) = 1 , 1 1 1 — вектор правой части.
В таком случае, первая итерация имеет следующий внешний вид:
x 1 ( 1 ) = — 0 , 1 × 1 + 0 , 1 × 1 + 1 , 1 = 1 , 1 x 2 ( 1 ) = — 0 , 1 × 1 , 1 + 0 , 1 + 1 = 0 , 99 x 3 ( 1 ) = 0 , 1 × 1 , 1 — 0 , 1 × 1 + 1 = 1 , 01
Аналогичным способом вычисляются приближения к решению:
x ( 2 ) = 1 , 102 0 , 991 1 , 011 , x ( 3 ) = 1 , 102 0 , 9909 1 , 0111 , x ( 4 ) = 1 , 10202 0 , 99091 1 , 01111
Находим норму матрицы В , для этого используем норму B ∞ .
Поскольку сумма модулей элементов в каждой строке равна 0,2, то B ∞ = 0 , 2 1 / 2 , поэтому можно вычислить критерий окончания итерации:
x ( n + 1 ) — x ( n ) ε
Далее вычисляем нормы разности векторов:
x ( 3 ) — x ( 2 ) ∞ = 0 , 002 , x ( 4 ) — x ( 3 ) ∞ = 0 , 00002 .
Поскольку x ( 4 ) — x ( 3 ) ∞ ε , то можно считать, что мы достигли заданной точности на 4-ой итерации.
x 1 = 1 , 102 ; x 2 = 0 , 991 ; x 3 = 1 ,01 1 .
Метод Зейделя
Метод Зейделя — метод является модификацией метода Якоби.
Суть: при вычислении очередного ( n + 1 ) — г о приближения к неизвестному x i при i > 1 используют уже найденные ( n + 1 ) — е приближения к неизвестным x 1 , x 2 , . . . , x i — 1 , а не n — о е приближение, как в методе Якоби.
x i ( n + 1 ) = b i 1 x 1 ( n + 1 ) + b i 2 x 2 ( n + 1 ) + . . . + b i , i — 1 x i — 2 ( n + 1 ) + b i , i + 1 x i + 1 ( n ) +
+ . . . + b i m x m ( n ) + d i
За условия сходимости и критерий окончания итераций можно принять такие же значения, как и в методе Якоби.
Решить СЛАУ методом Зейделя. Пусть матрица системы уравнений А — симметричная и положительно определенная. Следовательно, если выбрать начальное приближение, метод Зейделя сойдется. Дополнительных условий на малость нормы некоторой матрицы не накладывается.
Решим 3 системы уравнений:
2 x 1 + x 2 = 3 x 1 — 2 x 2 = 1 , x 1 + 2 x 2 = 3 2 x 1 — x 2 = 1 , 2 x 1 — 0 , 5 x 2 = 3 2 x 1 + 0 , 5 x 2 = 1
Приведем системы к удобному для итерации виду:
x 1 ( n + 1 ) = — 0 , 5 x 2 ( n ) + 1 , 5 x 2 ( n + 1 ) = 0 , 5 x 1 ( n + 1 ) + 0 , 5 , x 1 ( n + 1 ) = — 2 x 2 ( n ) + 3 x 2 ( n + 1 ) = 2 x 1 ( n + 1 ) — 1 , 2 x 1 — 0 , 5 x 2 = 3 2 x 1 + 0 , 5 x 2 = 1 .
Отличительная особенность, условие сходимости выполнено только для первой системы:
Вычисляем 3 первых приближения к каждому решению:
1-ая система: x ( 0 ) = 1 , 5 — 0 , 5 , x ( 1 ) = 1 , 75 0 , 375 , x ( 2 ) = 1 , 3125 0 , 1563 , x ( 3 ) = 1 , 4219 0 , 2109
Решение: x 1 = 1 , 4 , x 2 = 0 , 2 . Итерационный процесс сходится.
2-ая система: x ( 0 ) = 3 — 1 , x ( 1 ) = 5 9 , x ( 2 ) = — 15 — 31 , x ( 3 ) = 65 129
Итерационный процесс разошелся.
Решение: x 1 = 1 , x 2 = 2
3-я система: x ( 0 ) = 1 , 5 2 , x ( 1 ) = 2 — 6 , x ( 2 ) = 0 2 , x ( 3 ) = 0 2
Итерационный процесс зациклился.
Решение: x 1 = 1 , x 1 = 2
Метод простой итерации
Если А — симметричная и положительно определенная, то СЛАУ приводят к эквивалентному виду:
x = x — τ ( A x — b ) , τ — итерационный параметр.
Расчетная формула имеет следующий внешний вид:
x ( n + 1 ) = x ( n ) — τ ( A x n — b ) .
Здесь B = E — τ A и параметр τ > 0 выбирают таким образом, чтобы по возможности сделать максимальной величину B 2 .
Пусть λ m i n и λ m a x — максимальные и минимальные собственные значения матрицы А .
τ = 2 / ( λ m i n + λ m a x ) — оптимальный выбор параметра. В этом случае B 2 принимает минимальное значение, которое равняется ( λ m i n + λ m a x ) / ( λ m i n — λ m a x ) .
Лекция 5. Итерационные методы решения уравнений и систем
5.1 Простая итерация. Уравнения с одним неизвестным.Пусть задана непрерывная функция f(x) и требуется найти все или некоторые корни уравнения
| f(x)=0. | (5.1.1) |
Эта задача распадается на несколько задач. Во-первых, надо исследовать характер и расположение корней. Во-вторых, найти приближенные значения корней. В-третьих, выбрать из них интересующие нас корни и вычислить их с требуемой точностью.
Первая и вторая задачи решаются аналитическими и графическими методами. Например, многочлен
имеет n комплексных корней, не обязательно различных, и все корни лежат внутри круга

Когда ищутся только действительные корни уравнения, то полезно составить таблицу значений f(x). Если в двух соседних узлах таблицы функция имеет разные знаки, то между этими узлами лежит нечетное число корней уравнения (по меньшей мере один). Если эти узлы близки, то, скорее всего, корень между ними только один. Но выявить по таблице корни четной кратности сложно.
По таблице можно построить график функции y=f(x) и графически найти точки его пересечения с осью абсцисс. Этот способ более нагляден и дает неплохие приближенные значения корней. Во многих задачах такая точность уже достаточна. В технике еще популярны графические методы решения уравнений (номография). Построение графика зачастую позволяет выявить даже корни четной кратности.
Иногда удается заменить уравнение (5.1.1) эквивалентным ему уравнением φ(x) = ψ(x), в котором функции  и
и  имеют несложные графики. Например, уравнение x sin x – 1 = 0 удобно преобразить к виду sin x = 1/x. Абсциссы точек сечения этих графиков будут корнями исходного уравнения.
имеют несложные графики. Например, уравнение x sin x – 1 = 0 удобно преобразить к виду sin x = 1/x. Абсциссы точек сечения этих графиков будут корнями исходного уравнения.
Дихотомия (деление пополам). Пусть мы нашли такие точки  ,
,  , что
, что  , т.е. на отрезке
, т.е. на отрезке  лежит не менее одного корня уравнения. Найдем середину отрезка
лежит не менее одного корня уравнения. Найдем середину отрезка  и вычислим
и вычислим  . Из двух половин отрезка выберем ту, для которой
. Из двух половин отрезка выберем ту, для которой  , ибо один из корней лежит на этой половине. Затем новый отрезок опять делим пополам и выберем ту половину, на концах которой функция имеет разные знаки, и т.д. (рис. 5.1).
, ибо один из корней лежит на этой половине. Затем новый отрезок опять делим пополам и выберем ту половину, на концах которой функция имеет разные знаки, и т.д. (рис. 5.1).
Если требуется найти корень с точность ε, то продолжаем деление пополам до тех пор, пока длина отрезка не станет меньше 2ε. Тогда середина последнего отрезка даст значение корня с требуемой точностью.
Дихотомия проста и очень надежна: к простому корню она сходится для любых непрерывных функций f(x), в том числе недифференцируемых; при этом она устойчива к ошибкам округления. Скорость сходимости невелика: за одну итерацию точность увеличивается примерно вдвое, т.е. уточнение трех цифр требует 10 итераций. Зато точность ответа гарантируется.
Перечислим недостатки метода. Для начала расчета надо найти отрезок, на котором функция меняет знак. Если в этом отрезке несколько корней, то заранее неизвестно, к какому из них сойдется процесс (хотя к одному из них сойдется). Метод неприменим к корням четной кратности. Для корней нечетной высокой кратности он сходится, но менее точен и хуже устойчив к ошибкам округления, возникающим при вычислении f(x). Наконец, на системы уравнений дихотомия не обобщается.
Дихотомия применяется тогда, когда требуется высокая надежность счета, а скорость сходимости малосущественна.
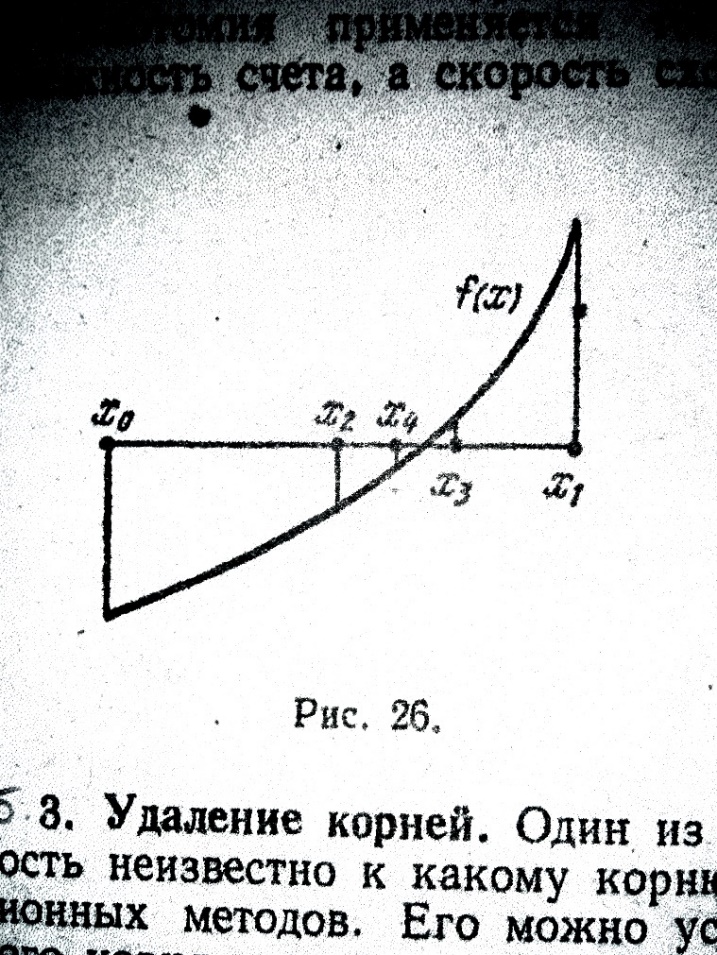
Удаление корней. Один из недостатков дихотомии – сходимость неизвестно к какому корню – имеется почти у всех итерационных методов. Его можно устранить удалением уже найденного корня.
Если  есть простой корень уравнения (5.1.1) и f(x) липшиц-непрерывна, то вспомогательная функция
есть простой корень уравнения (5.1.1) и f(x) липшиц-непрерывна, то вспомогательная функция  непрерывна, причем все нули функции f(x) и g(x) совпадают, за исключением , ибо
непрерывна, причем все нули функции f(x) и g(x) совпадают, за исключением , ибо  Если – кратный корень уравнения (5.1.1), то он будет нулем функции
Если – кратный корень уравнения (5.1.1), то он будет нулем функции  кратности на единицу меньше; остальные нули обеих функций по-прежнему будут одинаковы.
кратности на единицу меньше; остальные нули обеих функций по-прежнему будут одинаковы.
Поэтому найденный корень можно удалить, т.е. перейти к функции . Тогда нахождение остальных нулей f(x) сведется к нахождению нулей . Когда мы найдем какой-нибудь корень  функции , то этот корень тоже можно удалить, вводя новую вспомогательную функцию
функции , то этот корень тоже можно удалить, вводя новую вспомогательную функцию 
=  . Так можно последовательно найти все корни f(x).
. Так можно последовательно найти все корни f(x).
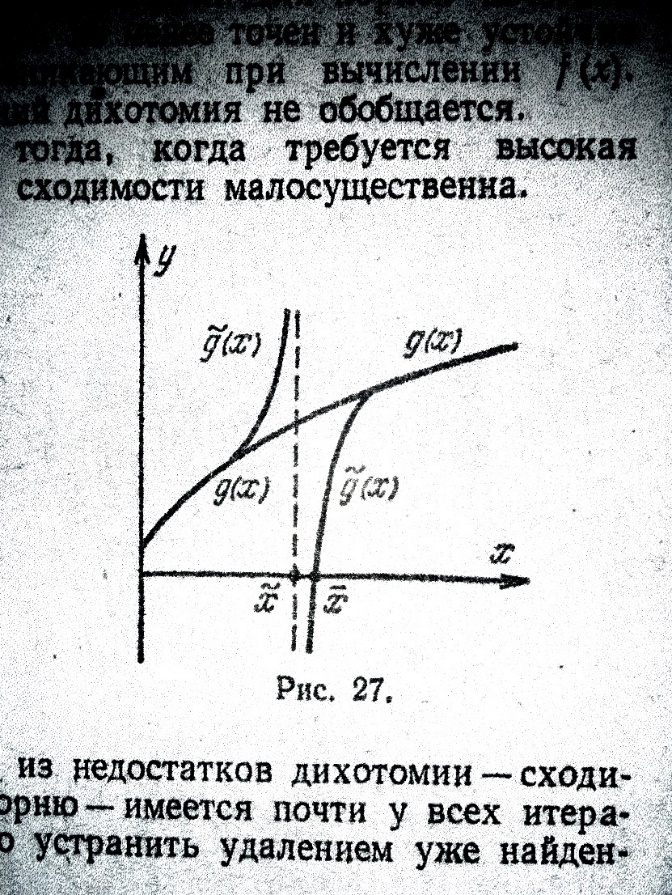
Строго говоря, мы находим лишь приближенное значение корня  . А функция
. А функция  имеет нуль в точке и полюс в близкой к ней точке
имеет нуль в точке и полюс в близкой к ней точке  (рис. 5.2); только на некотором расстоянии от этого корня она близка к . Чтобы это не сказывалось при нахождении следующих корней, надо вычислять каждый корень с высокой точностью.
(рис. 5.2); только на некотором расстоянии от этого корня она близка к . Чтобы это не сказывалось при нахождении следующих корней, надо вычислять каждый корень с высокой точностью.
Кроме того, в любом методе окончательные итерации вблизи определяемого корня рекомендуется делать не по функциям типа  , а по исходной функции
, а по исходной функции  . Последние итерации, вычисленные по функции , используются при этом в качестве нулевого приближения. Важно это при нахождении многих корней, ибо чем больше корней удалено, тем меньше нули вспомогательной функции
. Последние итерации, вычисленные по функции , используются при этом в качестве нулевого приближения. Важно это при нахождении многих корней, ибо чем больше корней удалено, тем меньше нули вспомогательной функции  соответствуют остальным нулям функции .
соответствуют остальным нулям функции .
Учитывая эти предосторожности и вычисляя корни с 8-10 верными десятичными цифрами, зачастую можно определить десятка два корней, о расположении которых заранее ничего не известно (в том числе корней высокой кратности p
Метод простых итераций. Заменим уравнение (5.1.1) эквивалентным ему уравнением  . Это можно сделать многими способами, например, положив
. Это можно сделать многими способами, например, положив  , где
, где  – произвольная непрерывная знакопостоянная функция. Выберем некоторое нулевое приближение и вычислим дальнейшие приближения по формулам
– произвольная непрерывная знакопостоянная функция. Выберем некоторое нулевое приближение и вычислим дальнейшие приближения по формулам
 | (5.1.2) |
Очевидно, если  стремится к некоторому пределу
стремится к некоторому пределу  , то этот предел есть корень исходного уравнения.
, то этот предел есть корень исходного уравнения.
Исследуем условия сходимости. Если  имеет непрерывную производную, тогда
имеет непрерывную производную, тогда
 , , | (5.1.3) |
где точка ξ лежит между точками и . Поэтому если всюду  , то отрезки
, то отрезки  убывают не медленней членов геометрической прогрессии со знаменателем
убывают не медленней членов геометрической прогрессии со знаменателем  и последовательность сходится при любом нулевом приближении. Если
и последовательность сходится при любом нулевом приближении. Если  , то в силу непрерывности
, то в силу непрерывности  больше единицы и в некоторой окрестности корня; в этом случае итерации не могут сходится. Если
больше единицы и в некоторой окрестности корня; в этом случае итерации не могут сходится. Если  , но вдали от корня , то итерации сходятся, если нулевое приближение выбрано достаточно близко к корню; при произвольном нулевом приближении сходимости может не быть.
, но вдали от корня , то итерации сходятся, если нулевое приближение выбрано достаточно близко к корню; при произвольном нулевом приближении сходимости может не быть.
Очевидно, что чем меньше q, тем быстрее сходимость. Вблизи корня асимптотическая сходимость определяется величиной  и будет особенно быстрой при
и будет особенно быстрой при  .
.
Значит, успех метода зависит от того, насколько удачно выбрано . Например, для извлечения квадратного корня, т.е. решения уравнения  , можно положить
, можно положить  или
или  и соответственно написать такие итерационные процессы:
и соответственно написать такие итерационные процессы:
 или или  . . | (5.1.4) |
Первый процесс вообще не сходится, а второй сходится при любом  ; сходится он очень быстро, ибо . Второй процесс используют при извлечении корня на калькуляторах.
; сходится он очень быстро, ибо . Второй процесс используют при извлечении корня на калькуляторах.
Каков практический критерий сходимости, т.е. когда надо прекращать итерации (5.1.2)? Из (5.1.3) видно, что если  , то итерации попеременно оказываются то с одной, то с другой стороны корня, так что корень заключен в интервале
, то итерации попеременно оказываются то с одной, то с другой стороны корня, так что корень заключен в интервале  . Это надежная, хотя несколько грубая оценка. Но она неприменима при
. Это надежная, хотя несколько грубая оценка. Но она неприменима при  , когда итерации сходятся к корню монотонно, т.е. с одной стороны.
, когда итерации сходятся к корню монотонно, т.е. с одной стороны.
Вблизи корня итерации сходятся примерно, как геометрическая прогрессия со знаменателем  . Чтобы сумма дальнейших ее членов не превосходила ε, должен выполняться критерий сходимости
. Чтобы сумма дальнейших ее членов не превосходила ε, должен выполняться критерий сходимости
 . . | (5.1.5) |
При выполнении этого условия итерации можно прекращать.
Метод простых итераций и почти все другие итерационные методы имеют важное достоинство: в них не накапливаются ошибки вычислений. Ошибка вычислений эквивалентна некоторому ухудшению очередного приближения. Но это отразится только на числе итераций, а не на точности окончательного результата. Подобные методы устойчивы даже по отношению к грубым ошибкам (компьютерного сбоя), если только ошибка не выбрасывает очередное приближение за пределы области сходимости.
Метод Ньютона. Он называется также методом касательных или методом линеаризации. Если есть некоторое приближение к корню , а  имеет непрерывную производную, то уравнение (5.1.1) можно преобразоватьть следующим образом:
имеет непрерывную производную, то уравнение (5.1.1) можно преобразоватьть следующим образом:
 .
.
Приближенно заменяя  на значение в известной точке , получим такой итерационный процесс:
на значение в известной точке , получим такой итерационный процесс:
 . . | (5.1.6) |
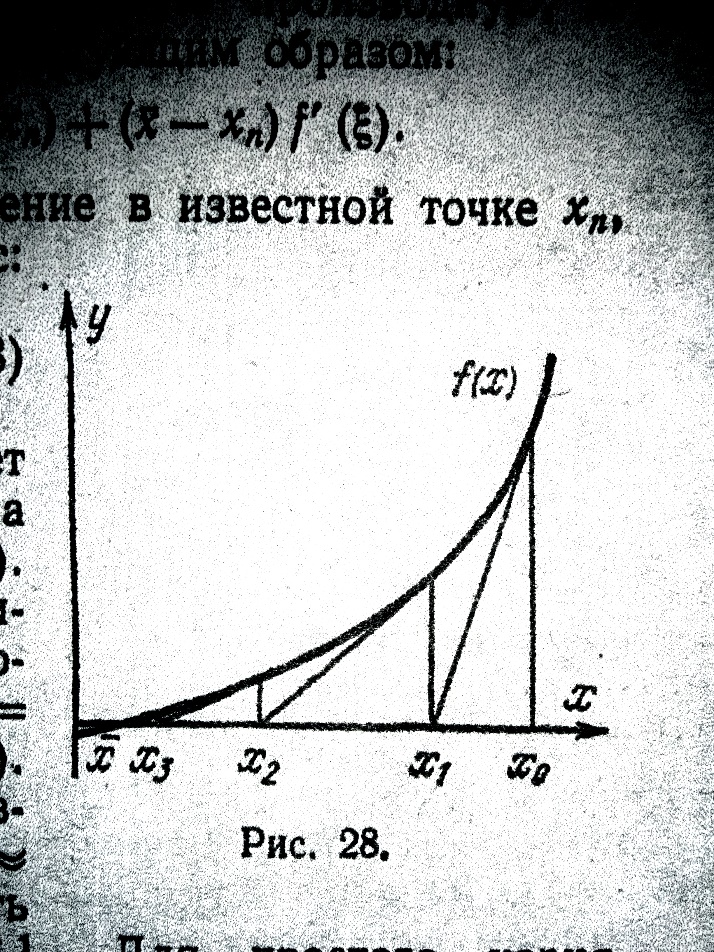 Геометрически этот процесс означает замену на каждой итерации графика
Геометрически этот процесс означает замену на каждой итерации графика  касательной к нему (рис. 28).
касательной к нему (рис. 28).
Метод Ньютона можно рассматривать как частный случай метода простых итераций, если положить  . Тогда
. Тогда  Если есть р-кратный корень уравнения (5.1.1), то вблизи него
Если есть р-кратный корень уравнения (5.1.1), то вблизи него  ; отсюда нетрудно получить
; отсюда нетрудно получить  , т.е.
, т.е.  . Для простого корня
. Для простого корня  и
и  . Используя результаты п.4, можно сформулировать следующие условия сходимости итерации (28). Если нулевое приближение выбрано достаточно близко к корню, ньютоновские итерации сходятся; скорость сходимости велика для простого корня и соответствует скорости геометрической прогрессии для кратного корня. При произвольном нулевом приближении итерации сходятся, если всюду
. Используя результаты п.4, можно сформулировать следующие условия сходимости итерации (28). Если нулевое приближение выбрано достаточно близко к корню, ньютоновские итерации сходятся; скорость сходимости велика для простого корня и соответствует скорости геометрической прогрессии для кратного корня. При произвольном нулевом приближении итерации сходятся, если всюду 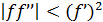 ; в противном случае сходимость будет не при любом нулевом приближении, а только в некоторой окрестности корня.
; в противном случае сходимость будет не при любом нулевом приближении, а только в некоторой окрестности корня.
Сходимость вблизи любого корня монотонна, что легко видеть на рис. 28; но вдали от корня возможна немонотонность итерации. Отметим, что рис. 28 указывает еще на одно достаточное условие сходимости итерации. Пусть  справа от корня на отрезке
справа от корня на отрезке  ; если выбрано также справа от корня на этом отрезке, то итерация (28) сходится, причем монотонно. То же будет, если
; если выбрано также справа от корня на этом отрезке, то итерация (28) сходится, причем монотонно. То же будет, если  слева от корня на отрезке
слева от корня на отрезке  , и на этом же отрезке выбрано нулевое приближение. Таким образом, итерации сходятся к корню с той стороны, с которой
, и на этом же отрезке выбрано нулевое приближение. Таким образом, итерации сходятся к корню с той стороны, с которой  .
.
Оценим скорость сходимости вблизи простого корня. По определению простых итераций,  . Разлагая правую часть по формуле Тейлора и учитывая равенство , получим
. Разлагая правую часть по формуле Тейлора и учитывая равенство , получим
 , , | (5.1.7) |
| Т а б л и ц а 1 | ||
 | ||
| n |  , метод Ньютона , метод Ньютона | , метод секущих |
| 1,0000 | 1,0000 | |
| 2,5000 | 2,5000 | |
| 2,0500 | 1,8571 | |
| 2,0001 | 1,9836 |
т.е. погрешность очередного приближения примерно равна квадрату погрешности предыдущего приближения. Например, если (n-1)-я итерация давала 3 верных знака, то n-я даст примерно 6 верных знаков, а (n+1)-я – примерно 12 знаков. Это иллюстрирует быструю сходимость вблизи корня. Разумеется, вдали от корня подобные соображения неприменимы.
Если вычисляется корень высокой кратности, то  в знаменателе формулы (28) становится малой вблизи корня. Чтобы не было потери точности, отношение
в знаменателе формулы (28) становится малой вблизи корня. Чтобы не было потери точности, отношение  надо вычислять достаточно аккуратно. К остальным погрешностям расчета метод Ньютона хорошо устойчив.
надо вычислять достаточно аккуратно. К остальным погрешностям расчета метод Ньютона хорошо устойчив.
Для нахождения корней произвольной дифференцируемой функции чаще всего применяют метод Ньютона, особенно если известны разумные начальные приближения для корней.
П р и м е р. Рассмотрим решение уравнения  . Тогда общая формула метода Ньютона (5.1.6) принимает вид
. Тогда общая формула метода Ньютона (5.1.6) принимает вид
 .
.
Мы получили вторую формулу (5.1.4), которая, как отмечалось раньше, позволяет очень быстро находить квадратный корень с помощью только сложения и деления. Для иллюстрации в таблице 16 приведен ход итерации при извлечении квадратного корня из а = 4.Видно, что сходимость очень быстрая; несмотря на неважное нулевое приближение, уже третья итерация дает точность 0,005%. Попутно можно заметить, что вблизи корня итерация сходится с одной стороны, т.е. монотонно, хотя первая итерация дает переброс на другую сторону корня.
Метод секущих. В методе Ньютона требуется вычислять производную функции, что не всегда удобно. Можно заменить производную первой разделенной разностью, найденной по двум последним итерациям, т.е. заменить касательную секущей. Тогда вместо процесса (5.1.6) получим
 . . | (5.1.8) |
 Для начала процесса надо задать и (рис. 29). Такие процессы, где для вычисления очередного приближения надо знать два предыдущих, называют двухшаговыми.
Для начала процесса надо задать и (рис. 29). Такие процессы, где для вычисления очередного приближения надо знать два предыдущих, называют двухшаговыми.
Эти небольшие изменения сильно влияют на характер итераций. Например, сходимость итераций может быть немонотонной не только вдали от корня, но и в малой окрестности корня. Скорость сходимости также изменяется. Приведенный в таблице 1 для сравнения расчет по методу Ньютона показывает, что метод секущих сходится медленнее, т.к. в методе Ньютона ошибка убывает быстрей. Но в методе Ньютона на каждой итерации надо вычислять и функцию, и производную, а в методе секущих – только функцию.
В знаменателе формулы (5.1.8) стоит разность значений функции; вдали от корня это несущественно, но вблизи корня значения функции малы и очень близки. Возникает потеря значащих цифр, приводящая к «разболтке» счета, что ограничивает точность.
От «разболтки» страхуются так называемым приемом Гарвика. Выбирают не очень малое значение ε, ведут итерации до выполнения условия  и затем продолжают расчет до тех пор, пока
и затем продолжают расчет до тех пор, пока  убывают. Первое же возрастание обычно означает начало «разболтки»; тогда расчет прекращают и последнюю итерацию не используют.
убывают. Первое же возрастание обычно означает начало «разболтки»; тогда расчет прекращают и последнюю итерацию не используют.
Метод парабол. Метод секущих основан на замене функции ф(х) интерполяционным полиномом первой степени по узлам xn , xn-1 . По трем последним итерациям можно построить полином второй степени, т.е. заменить график функции параболой. Примем этот полином в форме Ньютона:
Приравняв его нулю, получим квадратноеуравнение
Меньший по модулю из двух корней квадратного уравнения определяет новое приближение xn+1=xn+z .
Для начала расчета надо задать три первых приближения х0 ,х1 ,х2 (обычно наугад), т.е. процесс является трехшаговым.
Метод парабол построен по образцу методов третьего порядка, однако замена производных разделенными разностями приводит к существенному уменьшению скорости сходимости.
В этом методе «разболтка» счета вблизи корня сказывается еще больше, чем в методе секущих, т.к. в расчете участвуют вторые разности, но все-таки корни можно найти с хорошей точностью; для определения оптимального числа итераций добно пользоваться приемом Гарвика (см. выше).
Метод парабол исключительно эффективен для нахождения всех корней многочлена высокой степени.
5.2. Итерации для линейных систем уравнений (обычный способ). Итерационные методы решения систем линейных уравнений позволяют получить это решение в виде предела последовательности некоторых векторов, построение которых осуществляется посредством единообразного процесса.
Для определенности запишем систему линейных уравнений четвертого порядка в виде  +
+  =0, где
=0, где  =
=  (i,y=1,2,3,4), векторы
(i,y=1,2,3,4), векторы
 =
=  , =
, =  .
.
Разрешим первое из уравнений относительно x1 , второе – относительно x2 и т.д. Тогда эту систему можно переписать в виде
 = —
= —  (i=1, 2, 3, 4; k=1, 2, 3, 4, 5) . (2)
(i=1, 2, 3, 4; k=1, 2, 3, 4, 5) . (2)
Система (1) является частным случаем записи вида
При этом линейная функция, например, L1(x1, x2, x3, x4) фактически не зависит от x1 согласно (1). Выводы не изменятся, если она будет содержать слагаемое вида α11x1 .То же относится к правым частям остальных уравнений.
Зададим произвольные начальные значения неизвестных  ,
,  ,
,  ,
,  . Подставляя эти значения в правые части системы (3), получим первые приближения:
. Подставляя эти значения в правые части системы (3), получим первые приближения:
 =L1( ,
=L1( ,  ,
,  , ) ,
, ) ,
 =L4( , , , ).
=L4( , , , ).
Полученные первые приближения могут быть таким же образом использованы для получения вторых, третьих и т.д., так что для любого ν можно получить ν-е приближение  ,
,  ,
,  ,
,  .
.
Можно установить условия, которые обеспечат сходимость получающихся приближений к истинному решению системы x1, x2, x3, x4, для чего достаточно отличия от нуля определителя системы detA≠0.
Обозначим через  ошибку ν-го приближения для k-го неизвестного
ошибку ν-го приближения для k-го неизвестного
=  – xk ,
– xk ,
где xk – точное значение неизвестного в решении системы, которое предполагается существующим.
Показано, что для сходимости итерационного процесса к точному решению системы в этом способе достаточно выполнения условия С (ν) =L1 (x1 (ν-1) , x1 (ν-1) ,…),
Иначе говоря, следующее приближение полностью определялось значениями, полученными на предыдущем шаге. Между тем уже при построении первого приближения можно, например, вычисляя значение x2 (1) , воспользоваться для x1 не нулевым приближением x1 (0) , а уже полученным нами первым приближением x1 (1) . Вычисляя χ3 , можно использовать уже не только x1 (1) , но и x2 (1) и т. д.
Таким образом, вместо формул (1) предлагается использовать для отыскания следующего приближения формулы такого вида (мы снова пишем их для конкретного случая системы четырех уравнений с четырьмя неизвестными):
 (2)
(2)
Это изменение и составляет идею итераций по способу Зейделя.
Естественно ожидать, что итерации по способу Зейделя дадут при том же числе шагов более точные результаты, чем обычные итерации, или, что то же самое, та же точность будет достигнута за меньшее число шагов. Вообще говоря, эти ожидания оправдываются. Однако нужно иметь в виду, что условия сходимости обычного итерационного процесса и итерационного процесса Зейделя различны. Один из этих процессов для данной системы может оказаться расходящимся тогда, когда другой сходится.
Вычислительная схема итерационного процесса Зейделя строится, как и для обычных итераций, на вычислении последовательных поправок. Рассмотрим эту схему, ограничившись, для краткости, системой трех линейных уравнений с тремя неизвестными. Формулы для отыскания следующих приближений через предыдущие будут в этом случае иметь вид
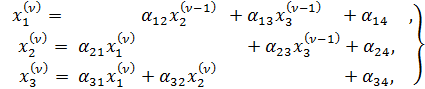 (3)
(3)
Формулы для вычисления поправок легко получить, исходя непосредственно из определения и используя (3). Действительно, для ν-ой итерации
δ1 (ν) =  ˗
˗  = (
= (  +
+  ) ˗ (
) ˗ (  + ) = =
+ ) = =  +
+  (
(  ,
,
δ1 (ν) =  +
+  . (4)
. (4)
Для  формула выглядит несколько иначе. Так как =
формула выглядит несколько иначе. Так как =  ˗
˗  =
=
= (  +
+  ) ˗ (
) ˗ (  + ),
+ ),
 =
=  +
+  , (5)
, (5)
 =
=  +
+  . (6)
. (6)
Как и для обычного итерационного процесса, формулы (4)-(6) могут быть использованы для вычисления поправок  для всех ν = 1, 2, …. , но не для ν = 0; для
для всех ν = 1, 2, …. , но не для ν = 0; для  формулы должны быть выведены отдельно. Если принять за начальные приближения значения соответствующих свободных членов
формулы должны быть выведены отдельно. Если принять за начальные приближения значения соответствующих свободных членов
= , =  =
=  ,
,
то для первых поправок получим выражения
 (7)
(7)
где = +  и
и  = +
= +  .
.
Расположение вычислений показано в табл. 1. Верхняя часть ее не отличается от обычного способа, а таблица для вычисления поправок имеет уже несколько другой вид: при вычислении очередных поправок в ряде случаев используются уже полученные поправки того же этапа вычислений. Соответствующие места в табл. 1. подчеркнуты.
Вычисления продолжаются до получения достаточно малых поправок. Окончательные значения неизвестных получаются по формулам
 +… (𝓀 = 1,2,3).
+… (𝓀 = 1,2,3).
Таблица 1. Алгоритм способа Зейделя
для системы трех уравнений с тремя неизвестными
http://zaochnik.com/spravochnik/matematika/issledovanie-slau/iteratsionnye-metody-reshenija-slau/
http://megalektsii.ru/s62815t7.html