Работа 13. ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Задание: Экспериментально проверить основной закон динамики вращательного движения. Определить момент инерции маятника Обербека без цилиндров с предельной относительной погрешностью E, не превышающей 5 %.

Оборудование и принадлежности: установка для проведения измерений, штангенциркуль.
Для изучения вращательного движения используется маятник Обербека рис. 1. Он состоит из четырех взаимно перпендикулярных стержней 1, укрепленных на втулке. Втулка и два шкива различных радиусов насажены на общую ось. Ось закреплена в подшипниках, так что вся система может свободно вращаться вокруг горизонтальной оси. На стержни надеваются цилиндры 2 массой MЦ, которые могут перемещаться и закрепляться посредством винтов на любом расстоянии от оси вращения. Момент инерции маятника можно изменять, передвигая грузы вдоль стержней. На один из шкивов маятника навита тонкая нить 3, на конце которой находится груз 4 массы M. Момент силы создаваемый грузом служит для приведения маятника во вращательное движение. Груз удерживается в неподвижном состоянии с помощью фрикционной муфты, приводимой в действие электромагнитом 5. Подвижный кронштейн 6 можно перемещать вдоль колонки и фиксировать в любом положении, изменяя таким образом высоту падения груза. Для отсчета высоты на колонке нанесена шкала 7. На подвижном кронштейне 6 установлен фотоэлектрический датчик, импульсы которого служат для запуска миллисекундомера. На нижнем неподвижном кронштейне 7 закреплен фотоэлектрический датчик 8, вырабатывающий электроимпульс конца измерения времени, включающий тормозной электромагнит.
Перед началом работы необходимо с помощью регулируемых ножек основания прибора установить колонку в вертикальное положение. Установить подвижный кронштейн на выбранную высоту, чтобы грузы, падая, проходили через середину рабочего окна фотоэлектрических датчиков. При этом нижний край грузов Должен совпадать с чертой на корпусе верхнего фотоэлектрического датчика.
Общие сведения. При вращательном движении твердого тела вокруг неподвижной оси все его точки описывают окружности, центры которых лежат на оси вращения. Линейные физические величины – перемещение, скорость и ускорение –различны для разных точек. Поэтому для изучения вращательного движения вводят угловые величины, одинаковые для всех точек тела. Связь между линейными и угловыми величинами имеет вид:


 (1)
(1)
Где DS – пройденный путь, DJ – угловое перемещение, V – линейная скорость, AR – тангенциальное ускорение, W – угловая скорость, R – расстояние до оси вращения или радиус вращения точки, E – угловое ускорение.
Для вывода основного уравнения динамики вращательного движения твёрдого тела вокруг неподвижной оси мысленно разобьем тело на совокупность материальных точек массами Mi, находящимися на расстояниях Ri от оси вращения (рис. 2).

Пусть на точку Mi действует сила  , которая представляет равнодействующую всех приложенных внутренних и внешних сил
, которая представляет равнодействующую всех приложенных внутренних и внешних сил
 (2)
(2)
Внутренние силы взаимодействия удерживают точки твердого тела на определенных расстояниях друг от друга. По второму закону Ньютона ускорение данной  точки
точки  Связано с силой Fi Соотношением
Связано с силой Fi Соотношением
 (3)
(3)
Спроецируем (3) на направление касательной к траектории точки. Учитывая (1), получим
 (4)
(4)
Умножив (4) на Ri, получим:
 (5)
(5)
Где  – момент силы, действующей на I–тую точку относительно оси вращения. Поскольку, согласно (2), сила
– момент силы, действующей на I–тую точку относительно оси вращения. Поскольку, согласно (2), сила  есть сумма двух сил, то ее момент равен сумме моментов внешней и внутренней сил
есть сумма двух сил, то ее момент равен сумме моментов внешней и внутренней сил
 (6)
(6)
Просуммировав (6) по всем точкам, получим:
 (7)
(7)
Согласно третьему закону Ньютона каждой внутренней силе в системе соответствует сила, равная ей по величине, противоположная по направлению и направленная по одной и той же прямой:  (рис. 3). Моменты этих сил попарно равны по величине и противоположны по направлению. Поэтому очевидно, что сумма моментов всех внутренних сил равна нулю:
(рис. 3). Моменты этих сил попарно равны по величине и противоположны по направлению. Поэтому очевидно, что сумма моментов всех внутренних сил равна нулю:

 (8)
(8)
 (9)
(9)
– результирующий момент внешних сил.
В правую часть уравнения (7) входит сумма
 (10)
(10)
Которая называется моментом инерции тела относительно оси вращения. Момент инерции тела J численно равен сумме произведений масс всех его материальных точек на квадраты их расстояний до оси вращения. Для сплошного тела суммирование можно заменить интегрированием по объёму тела:
 (11)
(11)
Уравнение (7) с учетом (8), (9) и (10) примет вид:
 (12)
(12)
Соотношение (12) выражает основной закон динамики вращательного движения. Оно позволяет выяснить физический смысл момента инерции: Момент инерции является мерой инертности тела при вращательном движении. Это уравнение является следствием законов Ньютона. Поэтому его экспериментальная проверка является в то же время проверкой основных положений механики.
Теория метода: Для проверки основного уравнения динамики вращательного движения необходимо определять три величины: угловое ускорение E, момент сил М и момент инерции J маятника относительно оси вращения (см. рис. 1). При безразличном равновесии маятника его вращение под действием постоянного натяжения нити будет равноускоренным.
Если груз M опускается с высоты H за время T, то его ускорение
 (13)
(13)
Таким же будет ускорение любой точки поверхности шкива. Тогда
 (14)
(14)
Где RО – радиус шкива. Момент сил M = RОT, где T— сила натяжения нити. Сила Т определяется из второго закона Ньютона для опускающегося груза M:
Тогда сила натяжения нити
 (16)
(16)
Момент силы натяжения:
 (17)
(17)
При значительных силах трения FТр и их момента Mтр уравнение (12) примет вид:
Момент инерции маятника J состоит из суммы моментов инерции вала со шкивами JВ, стержня Jc и цилиндров JЦ:
Расчет моментов инерции полых цилиндров относительно произвольной оси дает (см. Приложение 1):
 (20)
(20)
Где MЦ – масса цилиндра; D – расстояние от оси вращения до центра масс цилиндра; L – его длина; R1 и R2 – внутренний и внешний радиусы.
Экспериментально момент инерции маятника определяется согласно (12,14) и (17):
 (21)
(21)
Момент инерции маятника со снятыми цилиндрами: JО = JВ + Jc
Тоже находится по (21). Тогда экспериментальное значение моментов инерции цилиндров при любом их положении на стержнях, согласно (21):
 (22)
(22)
Порядок выполнения задания
1. Снять цилиндры. С малым шкивом и минимальным значением массы груда провести контрольные измерения величин Ro, M, H, T, входящих в правую часть равенства (21), для выбранного значения H (около 40 см).
2. Оценить минимальную относительную погрешность прямых измерений величин Ro, M, H, T.
3. Оценить минимальную относительную погрешность косвенных измерений момента инерции маятника со снятыми цилиндрами Jo.
4. Провести повторные измерения Ro, T. Оценить случайную относительную погрешность прямых измерений этих величин. Сравнить ее с минимальной относительной погрешностью и сделать выводы о необходимом числе повторных измерений. Оценить полную относительную погрешность прямых измерений величин Ro, T.
5. По формуле (21) определить Jo.
6. Оценить полную относительную погрешность E косвенных измерений момента инерции маятника со снятыми цилиндрами Jo.
7. Для четырёх значений массы груза M и большого шкива измерить T, оставляя H неизменным. По (14), (17), (21) определить E, М, Jo. Результаты занести в таблицу 1.
8. Построить график E = F(M). По графику определить момент силы трения Мтр и момент инерции маятника без цилиндров Jo. Сравнить Jo с полученными ранее значениями.
9. Повторить опыт для разных значений момента инерции системы, получающихся при различном положении цилиндров относительно оси вращения при постоянной (лучше большей) массе груза M и высоте H. По формуле (21) определить J. Результаты занести в таблицу 2.
Результаты измерений и расчётов для определения E, М, Jo
ИЗУЧЕНИЕ ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Цель работы: с помощью маятника Обербека освоить основной закон динамики вращательного движения твердого тела.
![]()
Лабораторная работа № 6
ИЗУЧЕНИЕ ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Цель работы: с помощью маятника Обербека освоить основной закон динамики вращательного движения твердого тела.
![]()
Теоретическое введение
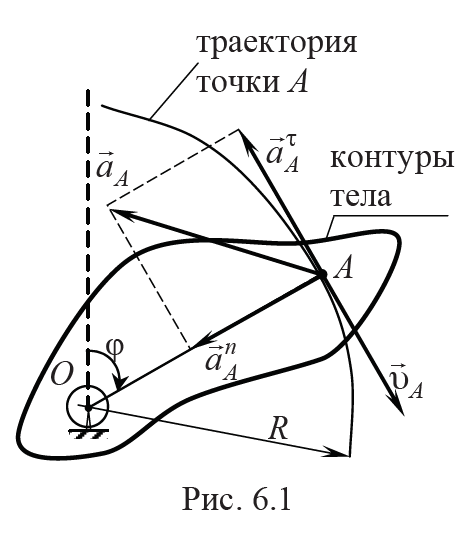
Кинематическое уравнение вращательного движения твердого тела относительно неподвижной оси определяет зависимость угла поворота φ тела от времени t (рис. 6.1, ось вращения проходит через точку О перпендикулярно плоскости рисунка)
Угловая скорость ω тела определяет быстроту изменения угла поворота и численно равна первой производной от угла поворота φ по времени t :
Угловое ускорение ε тела определяет быстроту изменения угловой скорости и, следовательно, оно численно равно первой производной от угловой скорости ω по времени t либо второй производной от угла поворота φ по времени t :
Угловые скорость и ускорение тела позволяют определить скорость υ и ускорение a любой точки этого тела, например точки А , движущейся по окружности радиуса R = OA :
где $$a^τ_A$$ и $$a^n_A$$ – касательное и нормальное ускорения точки А .
Момент силы F относительно точки О (рис. 6.2) определяет способность силы F вызвать вращение тела вокруг этой точки. Он равен векторному произведению радиус-вектора r точки А приложения силы F на вектор силы:
Модуль момента силы
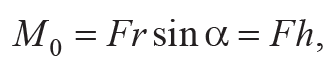
где h = rsinα – плечо силы F , т. е. кратчайшее расстояние от точки О до линии действия силы F (ЛДС). Направление вектора M0 находится по правилу векторного произведения, которое согласуется с правилом правой руки, или правилом буравчика.
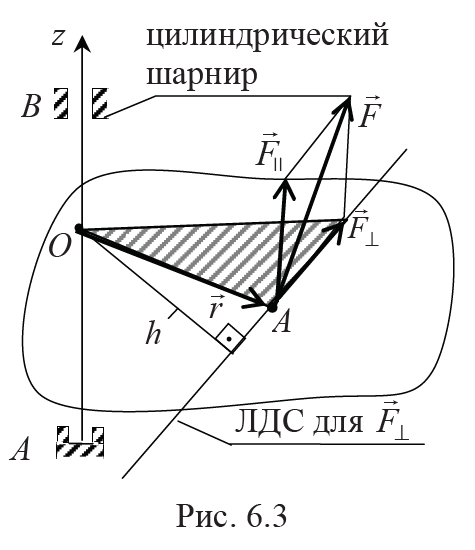
Момент силы F относительно оси z равен моменту ее перпендикулярной к оси составляющей F⊥ относительно точки О , находящейсяся на оси z (рис. 6.3):

где h – плечо силы F⊥ относительно точки О (заштрихованный треугольник расположен в горизонтальной плоскости); Mz – алгебраическое значение момента силы относительно оси z , которое равно проекции вектора М0 на эту ось. Отсюда следует правило знаков для Mz : если, наблюдая с конца оси z , поворот под действием силы F⊥ происходит против часовой стрелки (как на рис. 6.3), то момент Mz считается положительным , иначе – отрицательным .
В частном случае, если сила F параллельна оси z , то ее перпендикулярная проекция F⊥ = 0 и, следовательно, момент силы F относительно этой оси равен нулю.
Моментом инерции Iz тела относительно оси z называют величину (см. лаб. раб. № 5)
где mk – массы частиц, на которые мысленно можно разбить тело, а rk – расстояния от этих масс до оси z (рис. 6.4).
Основное уравнение динамики вращательного движения , описывающее вращение твердого тела относительно неподвижной оси, имеет следующий вид:
где $$M^e_z$$ – суммарный момент внешних сил, действующих на тело.
Уравнение (6.9) можно рассматривать как аналог 2-го закона Ньютона для материальной точки, или уравнения, описывающего движение центра масс твердого тела, или, в частности, поступательного движения этого тела:
где m – масса тела; aC – ускорение центра масс C тела; F e – суммарная внешняя сила, действующая на тело.
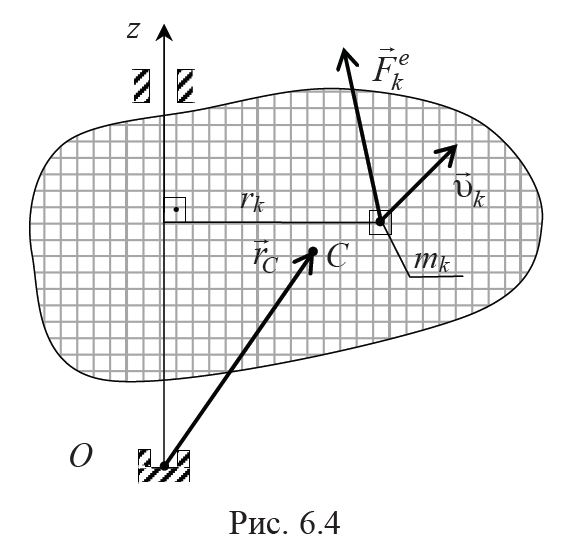
Радиус-вектор центра масс (точки C ) определяется соотношением
где rk – радиус-векторы частиц, на которые мысленно можно разбить тело массой m .
Из сопоставления (6.9) и (6.10) следует, что, поскольку масса m во 2-м законе Ньютона является мерой инертности материальной точки, то момент инерции Iz является мерой инертности для вращательного движения тела .
Описание установки и метода измерений
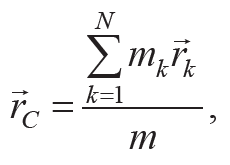
Общий вид маятника Обербека изображен на рис. 6.5, a . На вертикальной стойке имеется подшипниковый узел, на котором укреплен двухступенчатый блок 4 с четырьмя стержнями 5 , образующими крестовину. На стержнях 5 крестовины выполнены кольцевые выточки через 1 см друг от друга, первая из которых находится на расстоянии d1 = 4 см от оси вращения, а последняя – на расстоянии 25 см. Они позволяют закрепить четыре передвижных груза 1 на заданном расстоянии d от оси вращения. На одну из ступеней блока 4 наматывается нить, перекинутая через блок 6 , к ее концу прикреплена нагрузочная площадка 3 . На стойке имеются нижний неподвижный 7 и верхний подвижный 8 кронштейны с фотоэлектрическими датчиками. Для измерения высоты h между датчиками на стойке нанесена миллиметровая шкала. При утопленной кнопке «ПУСК» и нажатой кнопке «СЕТЬ» нить наматывают на блок 4 до тех пор, пока нижняя плоскость площадки 3 с грузами 2 не окажется немного выше риски, нанесенной на верхнем кронштейне, т. е. выше светового луча фотоэлектрического датчика. После этого кнопка «ПУСК» отпускается, а тормозной электромагнит прижимает фрикционную муфту и удерживает маятник вместе с грузами в состоянии покоя. Следующее нажатие кнопки «ПУСК» освобождает маятник, и он начинает вращаться под действием нагруженной площадки 3 . При пересечении площадкой 3 светового луча верхний фотоэлектрический датчик включает секундомер, шкала которого установлена на передней панели основания прибора. Площадка с грузами совершает поступательное, а маятник – вращательное движения. При пересечении площадкой светового луча нижнего фотоэлектрического датчика на кронштейне 7 автоматически выключается секундомер и включается тормозной электромагнит.
Пренебрегая сопротивлением воздуха и трением в подшипнике, можно воспользоваться формулами равноускоренного движения маятника из состояния покоя и получить формулу для косвенного измерения углового ускорения ε блока 4 с крестовиной:
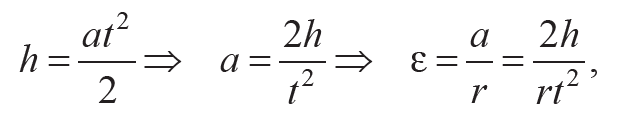
где r – радиус использованной ступени блока 4 ; а – ускорение площадки 3 ; t – время, отсчитанное секундомером.
Проведем динамическое (теоретическое) исследование движения маятника Обербека, используя его схему (рис. 6.5, б), на которой крестовина не изображена. Воспользуемся 2-м законом Ньютона для площадки с грузами массой m = m2 + m3 (в проекции на направление движения) и основным уравнением динамики вращательного движения для блока 4 с крестовиной и грузами 1 . Снова пренебрегая сопротивлением воздуха и трением в подшипнике, получим систему двух уравнений:

где Iz – момент инерции крестовины с грузами; F и F1 – силы натяжения правого и левого вертикальных участков нити.
Основное уравнение динамики для вращательного движения блока 6 имеет вид $$I^*_zε=(F^*−F^*_1)r^*$$ . Инерционные свойства этого блока весьма малы по сравнению с крестовиной, т. е. $$I^*_z , что позволяет считать осевой момент инерции $$I^*_z ≈ 0$$ а значит, $$F^*≈F^*_1$$ . Согласно 3-му закону Ньютона $$F = F^*$$ и $$F_1 = F^*_1$$ . Следовательно, $$F_1 = F$$ , что позволяет исключить неизвестную силу натяжения нити из системы (6.13). Принимая во внимание кинематическое соотношение a = εr , можно получить теоретическое выражение для углового ускорения ε блока 4 с крестовиной ( решите систему (6.13) и получите выражение для ε (т) самостоятельно ):
Порядок выполнения работы
1. Подготовьте таблицу для занесения и обработки результатов измерений.

2. В соответствии с номером звена в подгруппе определите расстояние d по формуле d = 0,11 + 0,02m и расстояние h = 0,41 + + 0,01m (в метрах, m – номер Вашего звена в подгруппе). Если номер звена в подгруппе нечетный , то используется груз массой m2 = 43 г , если четный, то m2 = 84 г .
3. Закрепите передвижные грузы 1 массой m1 (массы указаны на самих грузах) на четырех стержнях крестовины на расстоянии d . Штангенциркулем измерьте размеры груза 1 (его толщину l и диаметр D = 2R ), а также радиус r используемой ступени блока 4 .
4. Небольшими смещениями грузов 1 отцентрируйте маятник для двух взаимно перпендикулярных положений крестовины. Если центровка выполнена правильно, то маятник при отсутствии натяжения нити при любой ориентации будет находиться в равновесии (безразличное равновесие).
5. Зафиксируйте верхний передвижной кронштейн 8 на заданной высоте h так, чтобы его верхняя плоскость совпадала с соответствующим делением шкалы на стойке. Вставьте вилку кабеля питания установки в розетку электрической сети.
6. Положите на нагрузочную площадку 3 массой m3 заданный груз массой m2 , тогда масса, создающая ускорение, будет равна m = m2 + m3 (значение m3 указано на площадке). Закрепите конец нити на ступени радиусом r блока 4 . Утопите кнопку «ПУСК» и нажмите кнопку «СЕТЬ».
7. Вращая маятник, наматывайте нить на выбранную ступень диска до тех пор, пока нижняя плоскость нагрузочной площадки 3 не поднимется чуть выше линии, нанесенной на верхнем кронштейне. Отпустите кнопку «ПУСК», при этом электромагнит прижмет фрикционную муфту и будет удерживать крестовину в состоянии покоя.
8. Нажмите кнопку «СБРОС» и утопите кнопку «ПУСК». Как только площадка 3 начнет двигаться, она закроет световой луч и верхний фотодатчик запустит секундомер . Он остановится в тот момент, когда площадка закроет световой луч нижнего фотодатчика. Значение t1 занесите в таблицу. Нажмите кнопку «СБРОС». Пункты 7, 8 опыта повторите еще 5 раз ( i = 2, …, 6 ).
9. Рассчитайте среднее значение времени tсред , затем, используя tсред , по формуле (6.12) вычислите среднее угловое ускорение εсред .
10. В соответствии с методикой прямых измерений определите приборные погрешности Δr , Δh и случайную погрешность Δt при доверительной вероятности р = 0,95 . Самостоятельно выведите формулу для относительной погрешности δε косвенного измерения углового ускорения (с помощью формулы (6.12)), которая имеет следующий вид:
Вычислите относительную δε и абсолютную Δε погрешности ( Δε = δεεcред ).
11. По формуле (6.14) рассчитайте теоретическое ускорение ε (т) . Учтите, что момент инерции маятника Iz = I0 + 4I1 , где I0 = 4,71 × 10 –3 кг·м 2 – момент инерции крестовины без грузов, а момент инерции I1 груза 1 на расстоянии d от оси вращения вычисляйте как для материальной точки (I1 = m1d 2 ) .
12. Рассчитайте значение момента инерции $$I^*_1$$ груза 1 как для цилиндра радиусом R = D / 2 и высотой l , используя формулу
которая получена с помощью теоремы Штейнера. Рассчитайте уточненные значения Iz и ε (т) .
13. Подготовьте выводы по выполненной лабораторной работе.
Лабораторная работа 1-05 проверка основного уравнения динамики вращательного движения при вращении тел вокруг неподвижной оси

ЛАБОРАТОРНАЯ РАБОТА 1-05
ПРОВЕРКА ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ПРИ ВРАЩЕНИИ ТЕЛ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Цель работы: изучение динамики вращательного движения, экспериментальное подтверждение основного уравнения динамики вращательного движения вокруг неподвижной оси и справедливости теоремы Гюйгенса–Штейнера.
Приборы и принадлежности: крестообразный маятник Обербека, снабженный электронным секундомером, набор грузов определенной массы, прибор для измерения длины.
ВВЕДЕНИЕ
Основное уравнение динамики вращательного движения имеет следующий вид:
 , (1)
, (1)
где L = Jw — момент импульса вращающегося тела; J – момент его инерции относительно оси вращения; w — угловая скорость вращения и М = [r,F] – момент силы. Дифференцируя последнее равенство, получим
 . (2)
. (2)
Если вращение осуществляется вокруг неподвижной оси и если момент инерции остается постоянным, то уравнение (2) примет вид
 . (3)
. (3)
Здесь Jz и Мz – момент инерции и момент силы относительно неподвижной оси z. Угловое ускорение e связано с линейным ускорением точек, расположенных на расстоянии r от оси вращения, уравнением
Линейное ускорение, в свою очередь, связано с перемещением h и временем перемещения t, при условии, что начальная скорость перемещения равна нулю
 . (5)
. (5)
Моменты инерции простых тел относительно оси, проходящей через центр масс, известны. Теорема Гюйгенса–Штейнера позволяет определить момент инерции относительно любой другой оси, если она параллельна оси, проходящей через центр масс
 , (6)
, (6)
где J0 – момент инерции относительно оси, проходящей через центр масс; m – масса тел; R – расстояние между осями.
Приведенные зависимости позволяют решить поставленную задачу.
 Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
МЕТОДИКА ПРОВЕРКИ ОСНОВНОГО ЗАКОНА
Возможны два способа проверки основного закона динамики вращательного движения тел вокруг неподвижной оси:
а) установить линейную зависимость
б) установить линейную зависимость
а) Первый способ.
Груз mi, помещенный на платформу 6, создает вращающий момент Mi = = T × r, где Т – сила натяжения нити и r – радиус шкива, на который намотана нить. По второму закону Ньютона
где а – ускорение падающего груза с платформой. Момент силы натяжения равен
Сумма моментов сил, действующих на шкив:
Mi – Mтр = m(g – a)r – Mтр.= J× ,
,
где Мтр – момент силы трения
Здесь m = m0 + mi – масса платформы 6 с грузом 7.
В соответствии с теоремой Гюйгенса–Штейнера момент инерции крестовины с надетыми на спицы грузами mгр, равен
Суммарная масса крестовины со стержнями и надетыми на них грузами много больше массы груза с платформой. Кроме того, r mmin. Результаты внесите в табл. 1. Внизу таблицы запишите значение радиуса r того шкива, на котором намотана нить.
3. Установите на платформе груз mi > mmin. Не меняйте этот груз в течение всего опыта (M = const). В опыте изменяют момент инерции перемещением грузов mгр по спицам, изменяя расстояние R. При каждом значении R определите три раза время падения груза с платформой с высоты h. Результаты внесите в табл. 2.
http://physics.belstu.by/mechanics_pr/mechanics_lab_rab_6.html
http://pandia.ru/text/78/002/45210.php