Контрольная работа: Передаточные функции одноконтурной системы
| Название: Передаточные функции одноконтурной системы Раздел: Рефераты по математике Тип: контрольная работа Добавлен 21:52:15 24 декабря 2010 Похожие работы Просмотров: 508 Комментариев: 14 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать | |||||||||||||||||||||||||||||||||||||||||||||||||||||
 ; б)
; б) .
. .
. .
. .
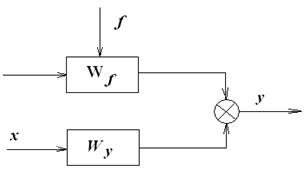
. , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
, то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.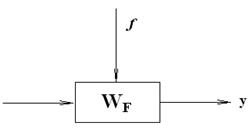
 .
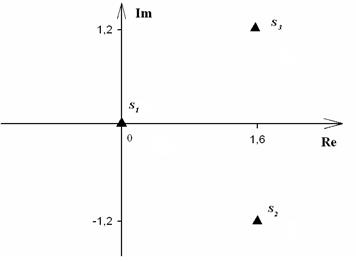
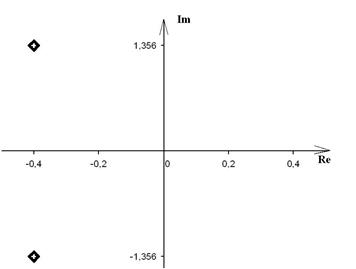
. , корни которого:
, корни которого: ,
,  и
и  .
. .
. .
. и
и  ,
,
 ,
, .
. и
и  .
.
 , получим:
, получим: , тогда:
, тогда: .
.
 .
.
 ;
; .
. .
.
 ;
; — по заданию;
— по заданию; — по ошибке;
— по ошибке; — по возмущению.
— по возмущению.



| Y(s) |
| F(s) |

| f |
| v |
| V(s) |
| y |
| W(s) |
| ε |
| E(s) |
Рисунок 7.2. стандартная схема системы
1. Передаточная функция разомкнутой системы:

 и
и  состоят из сомножителей не выше второго порядка.
состоят из сомножителей не выше второго порядка.
 – характеристическое уравнение разомкнутой системы, его корни определяют свойства разомкнутой системы.
– характеристическое уравнение разомкнутой системы, его корни определяют свойства разомкнутой системы.
2. Передаточная функция по задающему воздействию:

Приравниваем знаменатель к нулю, получаем характеристическое уравнение замкнутой системы.

 – характеристическое уравнение замкнутой системы, его корни определяют свойства замкнутой системы.
– характеристическое уравнение замкнутой системы, его корни определяют свойства замкнутой системы.
3. Передаточная функция по возмущению:

4. Передаточная функция по ошибке:

Понятие устойчивости
Очень важно изучить поведение системы во времени. В некоторых случаях процессы оказываются расходящимися, что свидетельствует о неустойчивости системы.
Для нормальной эксплуатации система должна быть устойчивой, т.е. после действия возмущения она должна возвращаться в состояние равновесия.
В качестве примера рассмотрим поведение шарика на вогнутой поверхности (желоб), выпуклой поверхности и плоской поверхности.
Устойчивая система (вогнутая поверхность), процесс сходится:
| X |
| x0 |
| t |
Неустойчивая система (выпуклая поверхность), процесс расходится:
| t |
| X |
| x0 |
Нейтральная система (горизонтальная поверхность), координата (процесс) остается постоянной.
| t |
| x0 |
| X |
Эти примеры являются механической аналогией понятия устойчивости. Рассмотрим математическое определение понятия устойчивости.
| u(t) |
| Д.У. |
| y(t) |
| U(s) |
| W(s) |
| Y(s) |
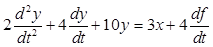
Система описывается дифференциальным уравнением:

 – решение дифференциального уравнения.
– решение дифференциального уравнения.
 –однородное уравнение определяет свободную составляющую решения
–однородное уравнение определяет свободную составляющую решения  .
.

 – корни характеристического уравнения.
– корни характеристического уравнения.
 – частное решение неоднородного дифференциального уравнения, определяется видом внешней функции;
– частное решение неоднородного дифференциального уравнения, определяется видом внешней функции;
 – постоянные коэффициенты, определяются из начальных условий и полного (общего) решения.
– постоянные коэффициенты, определяются из начальных условий и полного (общего) решения.
Строго устойчивость определяется в смысле Ляпунова. Для линейных систем с постоянными параметрами считается, что система устойчива, если предел свободной составляющей равен 0
 .
.
Устойчивость — внутреннее свойство системы, присущее ей вне зависимости от действующих на нее сигналов, поэтому рассматривается только свободная составляющая.
Это есть определение асимптотической устойчивости.
Свяжем требование устойчивости с расположением корней характеристического уравнения:
 ,
,
 — корни , i=1,2,…,n,
— корни , i=1,2,…,n,
вещественные обозначим  ,
,
комплексные –  .
.
Рассмотрим свободные составляющие соответствующие различным корням.
1. Корень вещественный, положительный: 
| +j |
| yсв |
 |
| + |
| пл.s |
| t |

| система неустойчива |
2. Корень вещественный, отрицательный: 
 +j +j |
| +j |
| пл. s |
| + |
| yсв |
| t |
| система устойчива |

3. Корни комплексные, сопряженные, с положительной вещественной частью: 
| +j |
 |
 |
| yсв |
 |
| + |
| пл. s |
| t |
 система неустойчива
система неустойчива
4. Корни комплексные, сопряженные, с отрицательной вещественной частью: 
| yсв |
| +j |
| |
| |
 |
| пл. s |
| + |
| t |
 система устойчива.
система устойчива.
Условием устойчивости является расположение корней характеристического уравнения в левой полуплоскости.
Система на границе устойчивости, если корни на мнимой оси.
Устойчивость – необходимое условие функционирования системы, поэтому в курсе уделяется много внимания методам оценки устойчивости системы.
Как найти характеристическое уравнение передаточной функции
Понятие линейного динамического звена
САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной совокупности отдельных элементов динамических звеньев.
Под динамическим звеном понимают в общем случае абстрактное устройство, имеющее вход и выход, и для которого задано уравнение, связывающее сигналы на входе и выходе, как это показано на рис. 1.

Подробное изучение свойств реальных объектов управления и систем автоматического управления приводит к описанию динамических звеньев в виде нелинейных дифференциальных уравнений. Но во многих случаях их можно линеаризовать, то есть заменить нелинейные уравнения линейными, приближенно описывающими процессы в системах. Тем самым осуществляется декомпозиция задач анализа и синтеза систем, то есть первоначально используют линейное представление, а затем осуществляют учет вносимых нелинейностями особенностей. Такому подходу способствует то, что, в большинстве случаев, нормально функционирующая система работает в режиме малых отклонений, при которых нелинейности не проявляются. В дальнейшем мы будем рассматривать преимущественно аппарат изучения линейных систем, а особенности систем других классов: нелинейных, импульсных, цифровых и стохастических, будут излагаться позднее в других учебных дисциплинах.
Если уравнение, связывающее сигналы  и
и  , линейно, то говорят о линейном динамическом звене
, линейно, то говорят о линейном динамическом звене
Уравнение линейного динамического звена имеет следующий общий вид:

где  — постоянные коэффициенты,
— постоянные коэффициенты,  .
.
Использовать такое описание динамического звена в задачах анализа и синтеза систем и объектов управления не рационально, поэтому существуют и иные формы описания и представления динамических звеньев и систем в целом.
Подвергнем уравнение (1) преобразованию Лапласа, считая начальные условия нулевыми и заменяя оригиналы сигналов их изображениями по Лапласу
 .
.
Используя теоремы преобразования Лапласа линейности и дифференцирования, получим операторное уравнение, связывающие изображения входного и выходного сигналов
Преобразуем уравнение (2) к следующему виду

Получим из (3) отношение изображений выходного и входного сигналов

Отношение (4) не зависит от изображений сигналов, определяется только параметрами самого динамического звена ( ), имеет вид дробно-рациональной функции.
), имеет вид дробно-рациональной функции.
Отношение изображений выходного и входного сигналов называют передаточной функцией динамического звена
 .
.
 ,
,
называют характеристическим уравнением динамического звена, так как знаменатель передаточной функции это характеристический полином дифференциального уравнения, описывающего динамическое звено.
Определим передаточную функцию динамического звена по его принципиальной электрической схеме

По второму закону Кирхгоффа запишем уравнения описывающие схему

С учетом того, что
 ,
,

Получим операторные уравнения

Из второго уравнения выразим значение изображения тока

Подставим полученное выражение в первое уравнение системы
 .
.
В итоге получаем искомую передаточную функцию
 .
.
Графически передаточные функции динамического звена представляют в следующем виде:

Если известно изображение входного сигнала и передаточная функция динамического звена, всегда можно найти изображение выходного сигнала при нулевых начальных условиях
 .(5)
.(5)
В общем случае САУ состоит из множества динамических звеньев, сигналы с выходов звеньев могут суммироваться или вычитаться, суммироваться с внешними для САУ сигналами. Суммирование и вычитание изображений сигналов могут быть представлено графически с помощью суммирующих звеньев:




Показанная выше неоднозначность графического представления вычитания изображений на суммирующем элементе связана с различием в стандартах разных стран.
Используя графическое представление передаточных функций звеньев и суммирующие звенья, можно в графической форме представить операторные уравнения, описывающие САУ. Такое графическое представление операторных уравнений в ТАУ называют структурной схемой.
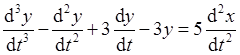
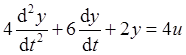
По математической модели объекта управления в форме системы дифференциальных уравнений определить структурную схему объекта.

Получим систему операторных уравнений, подвергнув исходную систему дифференциальных уравнений преобразованию Лапласа и заменив оригиналы изображениями,

Из первого уравнения системы операторных уравнений, которое описывает динамическое звено объекта управления, после преобразований получим
 .
.
Тогда передаточная функция этого звена имеет вид
 ,
,
а выражение  описывает суммирующее звено
описывает суммирующее звено  . Таким образом, получены два фрагмента структурной схемы
. Таким образом, получены два фрагмента структурной схемы

Из второго уравнения системы операторных уравнений, которое описывает динамическое звено объекта управления, после преобразований получим, вводя обозначение,
 .
.
Тогда передаточная функция этого звена имеет вид
 ,
,
а выражение  описывает суммирующее звено
описывает суммирующее звено  . Таким образом, получены еще два фрагмента структурной схемы
. Таким образом, получены еще два фрагмента структурной схемы

Соединим все фрагменты структурной схемы объекта управления, объединяя одноименные сигналы, либо разветвляя их с помощью точек ветвления , показанных на схеме. В результате получим
Временные характеристики динамического звена
Временной или импульсной характеристикой динамического звена называют реакцию звена на  , обозначая ее как
, обозначая ее как  . При этом схема эксперимента имеет вид
. При этом схема эксперимента имеет вид

Выясним, что представляет собой временная характеристика, то есть почему ее называют характеристикой динамического звена?
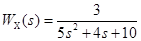
Для этого рассмотрим динамическое звено с передаточной функцией 

В этом случае, в соответствии с (5), имеем
 .
.

Получаем, что передаточная функция звена это изображение по Лапласу импульсной характеристики динамического звена. В свою очередь, импульсная характеристика может быть определена по передаточной функции
 ,
,
при использовании разложения в форму Хэвисайта и обратное преобразование Лапласа.
Знание импульсной характеристики позволяет определить реакцию динамического звена на сигнал любой формы.
Для динамического звена с передаточной функцией  преобразуем (5), используя теорему об умножении изображений преобразования Лапласа,
преобразуем (5), используя теорему об умножении изображений преобразования Лапласа,
 ,
,
а если легко получить  , тогда
, тогда
 .
.
Переходной характеристикой или переходной функцией динамического звена называют реакцию динамического звена на  , обозначая ее как
, обозначая ее как  . При этом схема эксперимента имеет вид
. При этом схема эксперимента имеет вид

Для анализа переходной характеристики рассмотрим динамическое звено с передаточной функцией 

В этом случае, в соответствии с (5), имеем
 .
.
По теореме об интегрировании оригинала имеем

Переходная функция является интегралом по времени от импульсной характеристике и наоборот
 .
.
Переходная характеристика динамического звена может быть определена по передаточной функции

Контрольные вопросы и задачи
Что такое линейное динамическое звено?
Как определить передаточную функцию линейного динамического звена?
Перечислите основные элементы структурных схем систем управления.
Как определить по передаточной функции динамического звена его временные характеристики: импульсную и переходную?
Как по переходной характеристике определить импульсную характеристику динамического звена?
Определите передаточную функцию динамического звена по его принципиальной электрической схеме
 .
.
Определите передаточную функцию динамического звена по его принципиальной электрической схеме

 .
.
По математической модели объекта управления в форме системы дифференциальных уравнений определить структурную схему объекта.
http://megaobuchalka.ru/12/9337.html
http://drive.ispu.ru/elib/lebedev/3.html