Теоретическая механика:
Кинематика точки
Смотрите также решения задач по теме «Кинематика точки» в онлайн решебниках Яблонского, Мещерского, Чертова (с примерами и методичкой для заочников), Иродова и Савельева.
В этой главе в основном рассмотрены методы решения задач, в которых закон движения точки выражен так называемым естественным способом: уравнением s=f(t) по заданной траектории *.
* Решения задач, в которых закон движения задан координатным способом, рассмотрены в конце главы (§ 31).
В этом случае главными параметрами, характеризующими движение точки но заданной траектории, являются: s – расстояние от заданного начального положения и t – время.
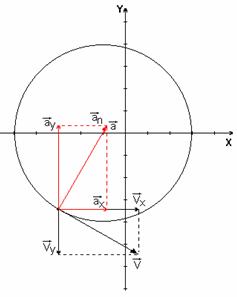
Величина, характеризующая в каждый данный момент времени направление и быстроту движения точки, называется скоростью (v на рис. 192). Вектор скорости всегда направлен вдоль касательной в ту сторону, куда движется точка. Числовое значение скорости в любой момент времени выражается производной от расстояния по времени:
v = ds/dt или v = f'(t).
Ускорение a точки в каждый данный момент времени характеризует быстроту изменения скорости. При этом нужно отчетливо понимать, что скорость – вектор, и, следовательно, изменение скорости может происходить по двум признакам: по числовой величине (по модулю) и по направлению.
Быстрота изменения модуля скорости характеризуется касательным (тангенсальным) ускорением at – составляющей полного ускорения a, направленной по касательной к траектории (см. рис. 192).
Числовое значение касательного ускорения в общем случае определяется по формуле
at = dv/dt или at = f»(t).
Быстрота изменения направления скорости характеризуется центростремительным (нормальным) ускорением an – составляющей полного ускорения a, направленного по нормали к траектории в сторону центра кривизны (см. рис. 192).
Числовое значение нормального ускорения определяется в общем случае по формуле
an = v 2 /R,
где v – модуль скорости точки в данный момент;
R – радиус кривизны траектории в месте, где находится точка в данный момент.
После того как определены касательное и нормальное ускорения, легко определить и ускорение a ( полное ускорение точки ).
Так как касательная и нормаль взаимно перпендикулярны, то числовое значение ускорения а можно определить при помощи теоремы Пифагора:
a = sqrt(at 2 + an 2 ).
Направление вектора a можно определить, исходя из тригонометрических соотношений, по одной из следующих формул:
sin α = an/a; cos α = at/a; tg α = an/at.
Но можно сначала определить направление полного ускорения a использовав формулу tg α = an/at,
а затем найти числовое значение a:
a = an/sin α или a = at/cos α.
Касательное и нормальное ускорения точки являются главными кинематическими величинами, определяющими вид и особенности движения точки.
Наличие касательного ускорения (at≠0) или его отсутствие (at=0) определяют соответственно неравномерность или равномерность движения точки.
Наличие нормального ускорения (an≠0) или его отсутствие (an=0) определяют криволинейность или прямолинейность движения точки.
Движение точки можно классифицировать так:
а) равномерное прямолинейное (at = 0 и an = 0);
б) равномерное криволинейное (at = 0 и an ≠ 0);
в) неравномерное прямолинейное (at ≠ 0 и an = 0);
г) неравномерное криволинейное (at ≠ 0 и an ≠ 0).
Таким образом, движение точки классифицируется по двум признакам: по степени неравномерности движения и по виду траектории.
Степень неравномерности движения точки задана уравнением s=f(t), а вид траектории задается непосредственно.
§ 27. Равномерное прямолинейное движение точки
Если at=0 и an=0, то вектор скорости остается постоянным (v=const), т. е. не изменяется ни по модулю, ни по направлению. Такое движение называется равномерным прямолинейным .
Уравнение равномерного движения имеет вид
(а) s = s0 + vt
или в частном случае, когда начальное расстояние s0=0,
(б) s = vt.
В уравнение (а) входит всего четыре величины, из них две переменные: s и t и две постоянные: s0 и v. Поэтому в условии задачи на равномерное и прямолинейное движение точки должны быть заданы три любые величины.
При решении задач необходимо выяснить все заданные величины и привести их к одной системе единиц. При этом нужно заметить, что как в системе МКГСС (технической), так и в СИ единицы всех кинематических величин одинаковы: расстояние s измеряется в м, время t – в сек, скорость v – в м/сек.
§ 28. Равномерное криволинейное движение точки
Если at = 0 и an ≠ 0, то модуль скорости остается неизменным (точка движется равномерно), но ее направление изменяется и точка движется криволинейно. Иначе, при равномерном движении по криволинейной траектории точка имеет нормальное ускорение, направленное по нормали к траектории и численно равное
an = v 2 /R,
где R – радиус кривизны траектории.
В частном случае движения точки по окружности (или по дуге окружности) радиус кривизны траектории во всех ее точках постоянный:
R = r = const,
а так как и числовое значение скорости постоянно, то
an = v 2 /r = const.
При равномерном движении числовое значение скорости определяется из формулы
v = (s — s0)/t или v = s/t.
Если точка совершит полный пробег по окружности, то путь s равен длине окружности, т. е. s = 2πr = πd (d = 2r – диаметр), а время равно периоду, т. е. t = T. Выражение скорости примет вид
v = 2πr/T = πd/T.
§ 29. Равнопеременное движение точки
Если вектор at=const (касательное ускорение постоянно как по модулю, так и по направлению), то an=0. Такое движение называется равнопеременным и прямолинейным .
Если же постоянным остается только числовое значение касательного уравнения
at = dv/dt = f'(t) = const,
то an≠0 и такое движение точки называется равнопеременным криволинейным .
При |at|>0 движение точки называется равноускоренным , а при |at| равнозамедленным .
Уравнение равнопеременного движения независимо от его траектории имеет вид
(1) s = s0 + v0t + att 2 / 2.
Здесь s0 – расстояние точки от исходного положения в момент начала отсчета; v0 – начальная скорость и at – касательное ускорение – величины численно постоянные, a s и t – переменные.
Числовое значение скорости точки в любой момент времени определяется из уравнения
(2) v = v0 + att.
Уравнения (1) и (2) являются основными формулами равнопеременного движения и они содержат шесть различных величин: три постоянные: s0, v0, at и три переменные: s, v, t.
Следовательно, для решения задачи на равнопеременное движение точки в ее условии должно быть дано не менее четырех величин (систему двух уравнений можно решить лишь в том случае, если они содержат два неизвестных).
Если неизвестные входят в оба основных уравнения, например, неизвестны at и t, то для удобства решения таких задач выведены вспомогательные формулы:
после исключения at из (1) и (2)
(3) s = s0 + (v + v0)t / 2;
после исключения t из (1) и (2)
(4) s = s0 + (v 2 — v0 2 ) / (2at).
В частном случае, когда начальные величины s0=0 и v0=0 (равноускоренное движение из состояния покоя), то получаем те же формулы в упрощенном виде:
(5) s = att 2 / 2;
(6) v = att;
(7) s = vt / 2;
(8) s = v 2 / (2at).
Уравнения (5) и (6) являются основными, а уравнения (7) и (8) – вспомогательными.
Равноускоренное движение из состояния покоя, происходящее под действием только силы тяжести, называется свободным падением . К этому движению применимы формулы (5)–(8), причем
at = g = 9,81 м/сек 2 ≈ 9,8 м/сек 2 .
§ 30. Неравномерное движение точки по любой траектории
§ 31. Определение траектории, скорости и ускорения точки, если закон ее движения задан в координатной форме
Если точка движется относительно некоторой системы координат, то координаты точки изменяются с течением времени. Уравнения, выражающие функциональные зависимости координат движущейся точки от времени, называют уравнениями движения точки в системе координат (см. § 51, п. 2 в учебнике Е. М. Никитина).
Движение точки в пространстве задается тремя уравнениями:
x = f1(t);
(1) y = f2(t);
z = f3(t);
Движение точки в плоскости (рис. 203) задается двумя уравнениями:
(2) x = f1(t);
y = f2(t);
Системы уравнений (1) или (2) называют законом движения точки в координатной форме .
Ниже рассматривается движение точки в плоскости, поэтому используется только система (2).
Если закон движения точки задан в координатной форме, то:
а) траектория плоского движения точки выражается уравнением
y = F(x),
которое образуется из данных уравнений движения после исключения времени t;
б) числовое значение скорости точки находится из формулы
v = sqrt(vx 2 + vy 2 )
после предварительного определения проекции (см. рис. 203) скорости на оси координат
vx = dx/dt и vy = dy/dt;
в) числовое значение ускорения находится из формулы
a = sqrt(ax 2 + ay 2 )
после предварительного определения проекций ускорения на оси координат
ax = dvx/dt и ay = dvy/dt;
г) направления скорости и ускорения относительно осей координат определяются из тригонометрических соотношений между векторами скорости или ускорения и их проекциями.
§ 32. Кинематический способ определения радиуса кривизны траектории
При решении многих технических задач возникает необходимость знать радиус кривизны R (или 1/R – кривизну ) траектории. Если задано уравнение траектории, то радиус ее кривизны в любой точке можно определить при помощи дифференциального исчисления. Используя уравнения движения точки в координатной форме, можно определять радиус кривизны траектории движущейся точки без непосредственного исследования уравнения траектории. Определение радиуса кривизны траектории при помощи уравнений движения точки в координатной форме называется кинематическим способом. Этот способ основан на том, что радиус кривизны траектории движущейся точки входит в формулу
an = v 2 /R,
выражающую числовое значение нормального ускорения.
Скорость v точки определяется по формуле
(б) v = sqrt(vx 2 + vy 2 ).
Числовое значение нормального ускорения an входит в выражение полного ускорения точки
a = sqrt(an 2 + at 2 ),
откуда
(в) an = sqrt(a 2 — at 2 ),
где квадрат полного ускорения
(г) a 2 = ax 2 + ay 2
и касательное ускорение
(д) at = dv/dt.
Таким образом, если закон движения точки задан уравнениями
x = f1(t);
y = f2(t),
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:
vx = f1‘(t);
vy = f2‘(t).
2. Подставив в (б’) выражения vx и vy, найти v 2 .
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение at, а затем at 2 .
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения
ax = f1»(t) = vx‘;
ay = f2»(t) = vy‘.
5. Подставив в (г) выражения ax и ay, найти a 2 .
6. Подставить в (в) значения a 2 и at 2 и найти an.
7. Подставив в (а) найденные значения v 2 и an, получить радиус кривизны R.
Кинематический способ определения радиуса кривизны траектории в теоретической механике
Кинематический способ определения радиуса кривизны траектории:
При решении многих технических задач возникает необходимость знать радиус кривизны р (или

Отсюда

Скорость  точки определяется по формуле
точки определяется по формуле
Следовательно,

Числовое значение нормального ускорения а„ входит в выражение полного ускорения точки
откуда 
где квадрат полного ускорения 
и касательное ускорение
Таким образом, если закон движения точки задан уравнениями 
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:

2. Подставив в (б’) выражения  найти
найти 
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение  а затем а?.
а затем а?.
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения

5. Подставив в (г) выражения 
6. Подставить в (в) значения
7. Подставив в (а) найденные значения  получить радиус кривизны р.
получить радиус кривизны р.
Задача:
Движение точки задано уравнениями 
(х, у—в см, t — в сек). Определить радиус кривизны траектории в те моменты, когда она пересекает ось Ох.
1. В те моменты, когда траектория пересекает ось Ох, ордината у—0. Поэтому, подставив во второе уравнение движения значение у = 0, получим
Отсюда [решая уравнение относительно 
 находим, что траектория пересекает ось Ох в моменты времени
находим, что траектория пересекает ось Ох в моменты времени
2. Находим выражения проекций скорости:

Как видно, проекция скорости на ось Ох — постоянная величина (не зависит от времени).
3. Определяем значение этих проекций в моменты пересечения траекторией оси Ох:
4. Числовое значение скорости точки в моменты пересечения траекторией оси Ох в данном случае одинаковы

5. Находим касательное ускорение точки. Для этого получим общее выражение (уравнение) скорости, воспользовавшись зависимостью (б):
6. Находим проекции полного ускорения точки:

Следовательно, в данном случае полное ускорение точки — постоянная величина. Причем

7. Определяем нормальное ускорение точки. Как при 
так и при 

8. Зная, что в моменты пересечения траекторией оси  5 см:сек и
5 см:сек и  находим радиусы кривизны траектории в этих точках:
находим радиусы кривизны траектории в этих точках:

Решение этой задачи рекомендуется самостоятельно иллюстрировать чертежом, изобразив на нем траекторию точки, векторы скорости  и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы
и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы 
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Равномерное вращательное движение
- Равнопеременное вращательное движение
- Неравномерное вращательное движение
- Плоскопараллельное движение тела
- Равномерное криволинейное движение точки
- Равнопеременное движение точки
- Неравномерное движение точки по любой траектории
- Определение траектории, скорости и ускорения точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Как найти радиус если задано уравнение движения
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ ПО КИНЕМАТИКЕ
7.1. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.2. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.3. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки:
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.4. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.5. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки по осям :
 ,
,
 ,
,

Ускорения точки по осям:
 ,
,
 ,
,
 .
.
Модуль касательного ускорения точки:
 , а модуль нормального ускорения
, а модуль нормального ускорения  .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением  .
.
7.6. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано: , ,  .
.
Решение: Скорости точки по осям :
,
,
Ускорения точки по осям:
,
,
.
Модуль касательного ускорения точки:
,
а модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением  .
.
7.7. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.8. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.9. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 .
.
 ,
,
 ,
,

Модуль полного ускорения:
 .
.
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.10. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.11. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.12. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано: ,  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
,

,
 ,
,

Модуль полного ускорения:
Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.13. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:
Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.14. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  ,
,  .
.
Найти:  ,
,  ,
,  .
.
Решение: Скорости точки по осям :
 ,
,
 ,
,
 ,
,

Ускорения точки по осям:
 ,
,
 ,
,

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.15. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
 ,
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.16. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,
 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.17. Определить касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  , .
, .
Решение: Скорости точки :
 ,
,
 ,
,

 ,
,
 ,
,
Модуль полного ускорения:

Модуль касательного ускорения точки:
,
А модуль нормального ускорения:
 .
.
Нормальное ускорение и радиус кривизны траектории связаны соотношением:
 .
.
7.18. Дан закон движения точки по окружности радиусом r . Определить:
1) скорость и ускорение точки при  и
и  ;
;
2) моменты остановки точки;
3) путь, пройденный точкой за 10секунд.
Дано:  ,
,  , , .
, , .
Найти:  ,
,  ,
,  ,
,  ,
,  ,
,  , П.
, П.
Решение: 1. На траектории отметим точку О – начало отсчета координаты s и укажем положительное направление отсчета этой координаты. Отметим положение точки в заданные моменты времени: При  :
:
 ;
;
При :
 .
.
Проведем из этих точек естественные оси координат.
Определим проекцию скорости на касательную:
 .
.
При :  ;
;
При :  .
.
Векторы и совпадают со своими проекциями. Определим проекции ускорения на естественнее оси координат :
 ;
;  , Полное ускорение точки
, Полное ускорение точки  .
.
При :
 ,
,
 и
и
 .
.
При  :
:
 ,
,
 и
и
 .
.
2. Чтобы найти время остановки надо найти время, когда скорость точки равна нулю:
 , получим
, получим  и
и  .
.
3. Поскольку за 10 секунд точка сделала две остановки, пройденный ею путь за 10с можно найти как сумму пути, пройденного от начала до первой остановки, от первой до второй остановки и от второй до момента времени :
 ,
,
 ;
;  ;
;  ;
;  .
.
Путь пройденный точкой за 10 секунд:
 .
.
7.19. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Дано:  ,
,  (1)
(1)
 ( x и y – в см , t и t 1 – в с).
( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2) для t = t 1 положение точки на траектории;
3)  .
.
Решение: 1) Уравнение движения (1) можно рассматривать как параметрические уравнения траектории точки. Чтобы получить уравнения траектории в координатной форме, исключаем время t из уравнений (1).
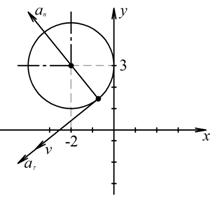
Возводя обе части равенств в квадрат, а затем складывая равенства, получаем  , т.е. траекторией точки М является окружность радиуса 2, показанная на рис.1.
, т.е. траекторией точки М является окружность радиуса 2, показанная на рис.1.
2) Определяем положение точки М в заданный момент времени t =1 с :
Вектор скорости точки
 . (2)
. (2)
 (3)
(3)
Здесь  – орты осей
– орты осей  и
и  ;
;  – проекции скорости и ускорения точки на оси координат.
– проекции скорости и ускорения точки на оси координат.
Найдем их, дифференцируя по времени уравнения движения (1):








По найденным проекциям определяем модуль скорости:
 , (4)
, (4)
 ,
,
 ,
,
и модуль ускорения точки:
 , (5)
, (5)

Модуль касательного ускорения точки
 , (6)
, (6)
 ; (7)
; (7)
 выражает проекцию ускорения точки на направление ее скорости. Знак «+» при означает, что движение точки ускоренное, направление
выражает проекцию ускорения точки на направление ее скорости. Знак «+» при означает, что движение точки ускоренное, направление  и
и  совпадают; знак «–» – что движение замедленное.
совпадают; знак «–» – что движение замедленное.
Вычисляем модуль касательного ускорения для заданного момента времени

Модуль нормального ускорения точки
 . (8)
. (8)
Если радиус кривизны траектории  в рассматриваемой точке неизвестен, то нормальное ускорение можно определить по формуле
в рассматриваемой точке неизвестен, то нормальное ускорение можно определить по формуле
 . (9)
. (9)
При движении точки в плоскости формула (9) принимает вид
 .
.
Модуль нормального ускорения можно определить и следующим образом:
 . (10)
. (10)
Воспользуемся в нашем случае формулой (10)

Радиус кривизны траектории в рассматриваемой точке определим из выражения:
 . (11)
. (11)
Тогда 
На рис. 1 показано положение точки М в заданный момент времени. Вектор строим по составляющим  и
и  , причем этот вектор должен по направлению совпадать с касательной к траектории. Вектор
, причем этот вектор должен по направлению совпадать с касательной к траектории. Вектор  строим по составляющим
строим по составляющим  и
и  и затем раскладываем на составляющие и
и затем раскладываем на составляющие и  . Совпадение величин
. Совпадение величин  и
и  , найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
, найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
7.20. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2) .
Указания. Задача — относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются скорость, касательное и нормальное ускорения точки при естественном способе задания ее движения. В задаче все искомые величины нужно определить только для момента времени t 1 = 1 с .
1. Для определения уравнения траектории точки исключим из заданных уравнений движения время t :
Отсюда окончательно находим уравнение траектории точки (параболы, см. рисунок):
2. Скорость точки найдем по ее проекциям на координатные оси:
V =  и при t 1 = 1 с,
и при t 1 = 1 с,
3. Аналогично найдем ускорение точки:
а = 
4. Касательное ускорение найдем, дифференцируя по времени равенство:
 . (3)
. (3)
ч исловые значения всех величин, входящих в правую часть выражения (3), определены и даются равенствами (1) и (2).
Подставив в (3) эти числа, найдем сразу, что при t 1 = 1 с
 =7,49 см/с 2 .
=7,49 см/с 2 .
5. Нормальное ускорение точки:
a n =  .
.
Подставляя сюда найденные числовые значения a 1 и a 1 τ , получим, что при t 1= 1 с
6. Радиус кривизны траектории ρ = V 2 / a n .
Подставляя сюда числовые значения V 1 и a 1 n , найдем, что при t 1 = 1 с
Ответ: V 1= 8 ,54 см/с, а 1 =8 см/с 2 , =7,49 см/с 2 , a 1 n =2,81 см/с 2 , ρ1 =25,95 см.
7.21. Точка движется по дуге окружности радиуса R =1 м по закону  ( s – в метрах, t – в секундах), где s = AM (см. рисунок).
( s – в метрах, t – в секундах), где s = AM (см. рисунок).
Найти: скорость и ускорение точки в момент времени t 1 =1 с .
Определяем скорость точки:
V = ds / dt =  .
.
При t 1 =1 с получим  = -1,26 м/ с .
= -1,26 м/ с .
Ускорение находим по его касательной и нормальной составляющим:
 ,
,
п ри t 1 = 1 с получим , учтя, что R = 1 м
 ,
,
тогда ускорение точки при t 1 =1 с будет:
 =1,59 м/с 2 .
=1,59 м/с 2 .
Изобразим на рисунке векторы  ,
,  , учитывая знак V 1 и считая положительным направление от А к М.
, учитывая знак V 1 и считая положительным направление от А к М.
7.22. По заданным уравнениям движения точки М установить вид её траектории и для момента времени t = t 1(с) найти положение точки на траектории, её скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории.
Дано:  ,
,  , t 1=1 сек ( x и y – в см , t и t 1 – в с).
, t 1=1 сек ( x и y – в см , t и t 1 – в с).
Найти: 1) вид траектории;
2)  .
.
1) Найдём траекторию движения:
Для этого исключим параметр t .

Возведём во вторую степень, получившиеся уравнения, а затем сложим, таким образом, исключится t . Получим:
Это окружность с центром в точке с координатами (-1;0) и радиусом 
2) Найдём положение точки на траектории в момент времени t = t 1:
3) Определим скорость токи:
Для нахождения вектора полной скорости необходимо сложить 2 вектора:

Найдём модуль полной скорости:

для момента времени t 1:
4) Определим ускорение точки:
для момента времени t 1:
для момента времени t 1:
Найдём полное ускорение:

Найдём модуль полного ускорения:
для момента времени t 1:

Определим касательное ускорение  :
:
 или,
или, 
для момента времени t :

Определим нормальное ускорение an :
для момента времени t 1:

5) Из полученных результатов можно найти радиус кривизны траектории , в момент времени t 1:
Действительно, этот радиус совпадает с радиусом окружности (траектории).
7.23. Точка М движется согласно уравнений  ;
;  ; ( x , y — в метрах, t — в секундах). Определить уравнение траектории точки, для момента времени t =1с, найти положение точки, а также скорость, полное, касательное, нормальное ускорения точки и радиус кривизны траектории.
; ( x , y — в метрах, t — в секундах). Определить уравнение траектории точки, для момента времени t =1с, найти положение точки, а также скорость, полное, касательное, нормальное ускорения точки и радиус кривизны траектории.
1) Найдем уравнение траектории точки. Для определения уравнения траектории исключим из уравнений движения время . Из первого уравнения движения точки найдем 
Из второго уравнения движения найдем 
Возведя полученные значения ( правую и левую стороны уравнения ) в квадрат и складывая их находим:
 .
.
Следовательно, траекторией точки является эллипс с центром в точке с координатами (3;1).
Вид траектории показан на рисунке.
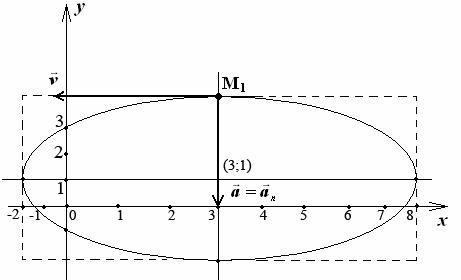
2) Найдем положение точки в момент времени t =1с
 ;
;  .
.
Положение точки М 1 показано на рисунке.
3) Найдем скорость точки М
 ,
,
Где  , или в момент времени t1=1c
, или в момент времени t1=1c
 , или в момент времени t1=1c
, или в момент времени t1=1c


4) Найдём ускорение точки.
 ,
,
где  , или
, или  ,
,
 , или
, или 
5) Найдем касательное ускорение точки M,
6) Найдём нормальное ускорение точки M ,
7) Найдем радиус кривизны траектории точки М,
 ,
,
Направление векторов показано на рисунке.
Ответ:  =7.85м/ c ;
=7.85м/ c ;  = 4.93 м/ c 2 ;
= 4.93 м/ c 2 ;  =0;
=0;  = 4.93 м/ c 2 ;
= 4.93 м/ c 2 ;  м
м
7.24. Пусть точка М движется в плоскости xOy в соответствии с уравнениями  . Для момента времени
. Для момента времени  = 0,5 с найти положение точки М на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
= 0,5 с найти положение точки М на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Решение: Заданный закон движения точки в координатной форме можно рассматривать как параметрические уравнения траектории точки. Исключим время t из уравнений движения и получим уравнение траектории точки в виде:
 .
.
Таким образом, траекторией точки М является эллипс со смещенным центром, изображенный на рис. Отметим на траектории положение точки М 1 ( x 1, y 1) в момент времени t 1 = 0,5 c
 ;
;
 .
.
Вектор скорости точки представим в виде:
 ,
,
где  – орты координатных осей О x и О y ;
– орты координатных осей О x и О y ;  – проекции вектора скорости точки на координатные оси, которые равны 1-м производным от соответствующих координат по времени
– проекции вектора скорости точки на координатные оси, которые равны 1-м производным от соответствующих координат по времени
В момент времени t 1 = 0,5 c
Вектор скорости точки  строим по двум взаимно перпендикулярным проекциям
строим по двум взаимно перпендикулярным проекциям  и
и  в соответствии с выбранным масштабом
в соответствии с выбранным масштабом
 .
.
Полученный вектор должен быть направлен по касательной к траектории точки в сторону движения. Модуль скорости точки определим по уже найденным проекциям

Вектор ускорения точки представим в виде:
 ,
,
где – орты координатных осей О x и О y ;  – проекции вектора скорости точки на координатные оси, которые равны 1-м производным от проекций вектора скорости или 2-м производным от соответствующих координат по времени:
– проекции вектора скорости точки на координатные оси, которые равны 1-м производным от проекций вектора скорости или 2-м производным от соответствующих координат по времени:
В момент времени t 1 = 0,5 c
Вектор ускорения точки  строим по двум взаимно перпендикулярным проекциям
строим по двум взаимно перпендикулярным проекциям  и
и  в соответствии с выбранным масштабом
в соответствии с выбранным масштабом
 .
.
Полученный вектор ускорения точки в общем случае должен отклоняться от вектора скорости в сторону вогнутости траектории, а при движении по эллипсовидной траектории – проходить через центр эллипса. Модуль ускорения точки определим по уже найденным проекциям

Вектор полного ускорения точки можно также представить в виде геометрической суммы его проекций на оси естественной системы отсчета
 ,
,
где  и
и  – единичные орты касательной и главной нормали;
– единичные орты касательной и главной нормали;  и
и  – соответственно проекции вектора ускорения на касательную и главную нормаль. Касательную М 1 t направляем по касательной к траектории в сторону движения точки движения, а главную нормаль М1 n – перпендикулярно касательной в сторону вогнутости траектории. При вычислении касательного ускорения удобно воспользоваться формулой, устанавливающей связь между координатным и естественным способами задания движения точки
– соответственно проекции вектора ускорения на касательную и главную нормаль. Касательную М 1 t направляем по касательной к траектории в сторону движения точки движения, а главную нормаль М1 n – перпендикулярно касательной в сторону вогнутости траектории. При вычислении касательного ускорения удобно воспользоваться формулой, устанавливающей связь между координатным и естественным способами задания движения точки
 .
.
В момент времени t 1 = 0,5 c
 .
.
Значение касательного ускорения  имеет отрицательный знак, следовательно, в данный момент времени движение точки замедленное и вектор касательного ускорения
имеет отрицательный знак, следовательно, в данный момент времени движение точки замедленное и вектор касательного ускорения  направлен в противоположную сторону направлению вектора скорости точки .
направлен в противоположную сторону направлению вектора скорости точки .
Нормальное ускорение  вычислим по формуле
вычислим по формуле  , если известен радиус кривизны траектории. Например, если точка движется по окружности радиусом R, то в любой точке траектории
, если известен радиус кривизны траектории. Например, если точка движется по окружности радиусом R, то в любой точке траектории  . Если же траекторией движения точки является прямая, то
. Если же траекторией движения точки является прямая, то  , следовательно,
, следовательно,  . В данном случае радиус кривизны траектории заранее не известен, поэтому нормальное ускорение определяем по формуле:
. В данном случае радиус кривизны траектории заранее не известен, поэтому нормальное ускорение определяем по формуле:
 .
.
В момент времени t 1 = 0,5 c
 .
.
Построим векторы и  в соответствии с уже выбранным масштабом, а затем сложим их геометрически. В результате получим тот же вектор полного ускорения точки
в соответствии с уже выбранным масштабом, а затем сложим их геометрически. В результате получим тот же вектор полного ускорения точки  , который ранее уже был получен геометрической суммой составляющих и . Этот факт служит контролем правильности решения.
, который ранее уже был получен геометрической суммой составляющих и . Этот факт служит контролем правильности решения.
Радиус кривизны траектории в рассматриваемой точке определим по формуле
 .
.
В момент времени t 1 = 0,5 c
 .
.
Ответ:  =8,82 см;
=8,82 см;  =2,59 см;
=2,59 см;  =4,44 см/ c ;
=4,44 см/ c ;  =2,22 см/ c ;
=2,22 см/ c ;  =4,96 см/с;
=4,96 см/с;  =6,97 см/с 2 ;
=6,97 см/с 2 ;  =3,49 см/с 2 ;
=3,49 см/с 2 ;  =7,79 см/с 2 ;
=7,79 см/с 2 ;  =4,67 см/с 2 ;
=4,67 см/с 2 ;  =6,23 см/с 2 ; =3,95 см (радиус кривизны траектории в точке
=6,23 см/с 2 ; =3,95 см (радиус кривизны траектории в точке  ).
).
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
http://www.evkova.org/kinematicheskij-sposob-opredeleniya-radiusa-kriviznyi-traektorii-v-teoreticheskoj-mehanike
http://www.teoretmeh.ru/primerkinematika4.htm