iSopromat.ru

Статически неопределимыми называют системы, в которых для определения опорных реакций либо внутренних усилий одних только уравнений статики недостаточно.
Статическая неопределимость возникает из-за наличия дополнительных или «лишних» связей.
Здесь под словом «лишние» понимаются дополнительные опоры (связи) добавление которых не влияет на геометрическую неизменяемость системы в целом.
Дополнительные опоры увеличивают прочность и жесткость систем, что позволяет делать их более экономичными.
Степень статической неопределимости систем
Степень статической неопределимости n определяется по формуле:
где,
k – количество неизвестных усилий (реакций связи),
m – количество уравнений равновесия которые можно составить для данной системы.
Системы, для которых n=1 называют однажды статически неопределимыми, n=2 – дважды СН и т.д.
Примеры статически неопределимых систем
В качестве примера рассмотрим следующий случай:
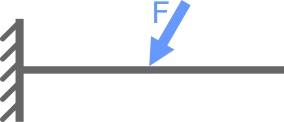
Консольная балка, закрепленная только в жесткой заделке – статически определима, так как в опоре данной схемы могут иметь место не более трех опорных реакций (вертикальная и горизонтальная силы и момент).
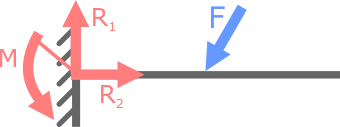
Как известно из курса теоретической механики для плоской системы сил можно составить только три уравнения равновесия. Трех уравнений для определения трех неизвестных вполне достаточно.
Теперь, если добавим к рассматриваемой схеме еще одну опору, например шарнирно-подвижную, то балка становится статически неопределимой, так как количество неизвестных связей увеличилось до четырех, а уравнений равновесия по-прежнему можно составить только три.
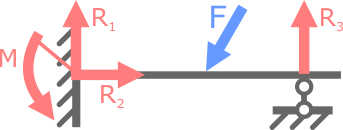
В данном случае для расчета опорных реакций не хватает еще одного уравнения, т.е. система один раз (однажды) статически неопределима.
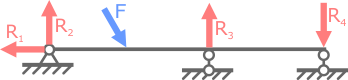
Если к данной системе последовательно добавлять опоры, то степень неопределимости также будет возрастать.
В таких случаях для расчета величины и направления неизвестных усилий потребуются дополнительные уравнения.
Другие примеры СНС
Примеры однажды статически неопределимых систем (n=1):

Статически неопределимая стержневая система
Раскрытие статической неопределимости
Расчет усилий в лишних связях называется раскрытием статической неопределимости системы.
Существует несколько способов раскрытия статической неопределимости, принцип которых основан на:
- равенстве нулю соответствующих перемещений точек системы на опорах;
- зависимости (совместности) деформаций элементов системы.
Наиболее универсальным из них является метод сил.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Как называется дополнительное уравнение при раскрытии статической неопределимости
Наиболее широко применяемым в машиностроении общим методом раскрытия статической неопределимости стержневых и рамных систем является метод сил. Он заключается в том, что заданная статически неопределимая система освобождается от дополнительных связей как внешних, так и взаимных, а их действие заменяется силами и моментами. Величина их в дальнейшем подбирается так, чтобы перемещения в системе соответствовали тем ограничениям, которые накладываются на систему отброшенными связями. Таким образом, при указанном способе решения неизвестными оказываются силы. Отсюда и название «метод сил». Такой прием не является единственно возможным. В строительной механике широко применяются и другие методы, например метод деформаций, в котором за неизвестные принимаются не силовые факторы, а перемещения в элементах стержневой системы.
Итак, раскрытие статической неопределимости любой рамы методом сил начинается с отбрасывания дополнительных связей. Система, освобожденная от дополнительных связей, становится статически определимой. Она носит название основной системы.

а-д) модификации основной системы
Рис.1. пример стержневой рамы:
Для каждой статически неопределимой стержневой системы можно подобрать, как правило, сколько угодно основных систем. Например, для рамы, показанной на рис. 1, можно предложить основные системы, а), б). которые получены путем отбрасывания семи дополнительных связей в различных комбинациях. Вместе с тем нужно помнить, что не всякая система с семью отброшенными связями может быть принята как основная. На рис. 2 показано три примера для той же рамы, в которой также отброшено семь связей, однако сделано это неправильно, так как оставшиеся связи не обеспечивают кинематической неизменяемости системы, с одной стороны, и статической определимости во всех узлах, с другой.

Рис.2.Некорректные преобразования заданной системы в основные по причине кинематической изменяемости- а) б), или статической определимости во всех узлах в)
После того как дополнительные связи отброшены и система превращена в статически определимую, необходимо, как уже говорилось, ввести вместо связей неизвестные силовые факторы. В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты. Как в том, так и в другом случае неизвестные силовые факторы будем обозначать Xi-, где i номер неизвестного. Наибольшее значение i равно степени статической неопределимости системы. Заметим, что для внутренних связей силы Xi, являются взаимными. Если в каком-либо сечении рама разрезана, то равные и противоположные друг другу силы и моменты прикладываются как к правой, так и к левой частям системы.

а)-д) по отношению к заданной системе
Рис.3. Пять разновидностей основных систем
Основная система, к которой приложены все внешние заданные силы и неизвестные силовые факторы, носит название эквивалентной системы. На рис. 3 показано пять эквивалентных систем, которые соответствуют приведенным выше основным системам (рис. 1). Принцип приложения неизвестных силовых факторов становится ясным без дальнейших пояснений.
Теперь остается составить уравнения для определения неизвестных.
Обратимся к некоторому конкретному примеру. Рассмотрим, например, первую эквивалентную систему из числа представленных на рис. 3,4. Тем, что рассматривается конкретно взятая семь раз статически неопределимая система, общность рассуждений не будет нарушена.
Перейдем теперь к составлению уравнений для определения неизвестных силовых факторов. Условимся через  обозначать взаимное смещение точек системы.
обозначать взаимное смещение точек системы.

Рис.4. Пример расчета рамы а)по выбранной основной системе- б)
Первый индекс при  соответствует направлению перемещения, а второй силе, вызвавшей это перемещение.
соответствует направлению перемещения, а второй силе, вызвавшей это перемещение.
В рассматриваемой раме в точке А отброшена неподвижная опора. Следовательно, горизонтальное перемещение здесь равно нулю и можно записать:

Индекс 1 означает, что речь идет о перемещении по направлению силы Х1, а индекс [Х1, Х2. Р] показывает, что перемещение определяется суммой всех сил, как заданных, так и неизвестных.
Аналогично можно записать:


Так как под величиной  понимается взаимное смещение точек, то
понимается взаимное смещение точек, то  обозначает вертикальное смещение точки В относительно С,
обозначает вертикальное смещение точки В относительно С,  горизонтальное взаимное смещение тех же точек,
горизонтальное взаимное смещение тех же точек,  есть взаимное угловое смещение сечений В и С. Угловым смещением будет также в рассматриваемой системе величина
есть взаимное угловое смещение сечений В и С. Угловым смещением будет также в рассматриваемой системе величина  .
.
В точках A и D смещения  являются абсолютными. Но абсолютные смещения можно рассматривать как смещения, взаимные с неподвижными отброшенными опорами. Поэтому принятые обозначения приемлемы для всех сечений системы.
являются абсолютными. Но абсолютные смещения можно рассматривать как смещения, взаимные с неподвижными отброшенными опорами. Поэтому принятые обозначения приемлемы для всех сечений системы.
Пользуясь принципом независимости действия сил, раскроем выражения для перемещений 


Аналогичным образом запишем и остальные пять уравнений: каждое из слагаемых  , входящих в уравнение, обозначает перемещение в направлении силы с первым индексом под действием силы, стоящей во втором индексе. Поскольку каждое перемещение пропорционально соответствующей силе, величину
, входящих в уравнение, обозначает перемещение в направлении силы с первым индексом под действием силы, стоящей во втором индексе. Поскольку каждое перемещение пропорционально соответствующей силе, величину  можно записать в следующем виде:
можно записать в следующем виде:

Что касается перемещений  ,
,  и т. д., то под индексом Р будем понимать не просто внешнюю силу Р, а вообще систему внешних сил, которая может быть произвольной Поэтому величины
и т. д., то под индексом Р будем понимать не просто внешнюю силу Р, а вообще систему внешних сил, которая может быть произвольной Поэтому величины  ,
,  . в уравнениях оставим неизменными.
. в уравнениях оставим неизменными.
Теперь уравнения примут вид:

Эти уравнения являются окончательными и носят название канонических уравнений метода сил. Число их равно степени статической неопределимости системы. В некоторых случаях, как увидим далее, когда имеется возможность сразу указать значения некоторых неизвестных, число совместно решаемых уравнений снижается. Остается теперь выяснить, что представляют собой коэффициенты  и как следует их определять. Для этого обратимся к выражению (6.1).
и как следует их определять. Для этого обратимся к выражению (6.1).
Если  , то
, то

Следовательно, коэффициент  это есть перемещение по направлению i-го силового фактора под действием единичного фактора, заменяющего k-й фактор. Например, коэффициент
это есть перемещение по направлению i-го силового фактора под действием единичного фактора, заменяющего k-й фактор. Например, коэффициент  уравнения представляет собой взаимное горизонтальное смещение точек B и С, которое возникло бы в раме, если бы к ней вместо всех сил была приложена только единичная сила в точке А (рис. 5 а). Если, например, вместо сил
уравнения представляет собой взаимное горизонтальное смещение точек B и С, которое возникло бы в раме, если бы к ней вместо всех сил была приложена только единичная сила в точке А (рис. 5 а). Если, например, вместо сил  приложив единичные силы, а все прочие силы с эквивалентной системы снять (рис. 5 б), то угол поворота в сечении D под действием этих сил будет
приложив единичные силы, а все прочие силы с эквивалентной системы снять (рис. 5 б), то угол поворота в сечении D под действием этих сил будет  , горизонтальное перемещение в точке А будет
, горизонтальное перемещение в точке А будет  и т. д.
и т. д.

а)  , б)
, б)  и
и 
Рис.5. Интерпретация коэффициентов уравнений метода сил:
Весьма существенно отметить, что в проделанном выводе совершенно не обусловливается то, каким образом возникают перемещения  . Хотя мы и рассматриваем раму, работающую на изгиб, все сказанное с равным успехом может быть отнесено, вообще, к любой системе, работающей на кручение, растяжение и изгиб или на то, другое и третье совместно.
. Хотя мы и рассматриваем раму, работающую на изгиб, все сказанное с равным успехом может быть отнесено, вообще, к любой системе, работающей на кручение, растяжение и изгиб или на то, другое и третье совместно.
Обратимся к интегралам Мора. Для того чтобы определить величину  , следует вместо внешних сил рассматривать единичную силу, заменяющую k-й фактор. Поэтому внутренние моменты и силы
, следует вместо внешних сил рассматривать единичную силу, заменяющую k-й фактор. Поэтому внутренние моменты и силы  ,
,  ,
,  ,
,  ,
,  и
и  в интегралах Мора заменим на
в интегралах Мора заменим на  ,
,  ,
,  ,
,  ,
,  и
и  , понимая под ними внутренние моменты и силы от единичного k-го фактора. В итоге получим:
, понимая под ними внутренние моменты и силы от единичного k-го фактора. В итоге получим:

где  ,
,  внутренние моменты и силы, возникающие под действием i-го единичного фактора. Таким образом, коэффициенты
внутренние моменты и силы, возникающие под действием i-го единичного фактора. Таким образом, коэффициенты  получаются как результат перемножения i-го и k-го внутренних единичных силовых факторов. Индексы i и k непосредственно указывают, какие факторы должны быть перемножены под знаком интегралов Мора. Если рама состоит из прямых участков и можно пользоваться правилом Верещагина, то
получаются как результат перемножения i-го и k-го внутренних единичных силовых факторов. Индексы i и k непосредственно указывают, какие факторы должны быть перемножены под знаком интегралов Мора. Если рама состоит из прямых участков и можно пользоваться правилом Верещагина, то  представляет собой результат перемножения i-х единичных эпюр на k-е единичные эпюры.
представляет собой результат перемножения i-х единичных эпюр на k-е единичные эпюры.

Это следует, с одной стороны, непосредственно из выражений для  , а с другой стороны, из теоремы о взаимности перемещений, поскольку перемещения
, а с другой стороны, из теоремы о взаимности перемещений, поскольку перемещения  и
и  возникают под действием одной и той же силы, равной единице.
возникают под действием одной и той же силы, равной единице.
Величины  , входящие в канонические уравнения, представляют собой перемещения в направлениях 1, 2. возникающие под действием заданных внешних сил в эквивалентной системе. Они определяются перемножением эпюры моментов заданных сил на соответствующие единичные эпюры.
, входящие в канонические уравнения, представляют собой перемещения в направлениях 1, 2. возникающие под действием заданных внешних сил в эквивалентной системе. Они определяются перемножением эпюры моментов заданных сил на соответствующие единичные эпюры.
Пример Раскрыть статическую неопределимость и построить эпюру изгибающих моментов для рамы, показанной на рис. 6.

Рис.6. Заданная расчетная схема
Рама три раза статически неопределима. Выбираем основную систему, отбрасывая левую заделку. Действие заделки заменяем двумя силами  ,
,  и моментом
и моментом  и определяем эквивалентную систему (рис. 7).
и определяем эквивалентную систему (рис. 7).

Рис.7. Динамика решения: от эквивалентной системы и силовой эпюры Р, включая эпюры моментов от единичных сил: 1, 2, 3 в точках приложения неизвестных  ,
,  ,
, 
Канонические уравнения (6.2) принимают для рассматриваемой системы такой вид:



Основные перемещения в рассматриваемой раме определяются изгибом. Поэтому, пренебрегая сдвигом и сжатием стержней, строим эпюры изгибающих моментов от заданной силы P и от трех единичных силовых факторов (рис. 7).
Определяем коэффициенты уравнений, считая, что жесткость на изгиб всех участков рамы постоянна и равна EJ. Величина  определяется перемножением первой единичной эпюры самой на себя. Для каждого участка берется, следовательно, площадь эпюры и умножается на ординату этой же эпюры, проходящую через ее центр тяжести:
определяется перемножением первой единичной эпюры самой на себя. Для каждого участка берется, следовательно, площадь эпюры и умножается на ординату этой же эпюры, проходящую через ее центр тяжести:

Заметим, что величины  при
при  всегда положительны, поскольку площади эпюр и ординаты имеют общий знак.
всегда положительны, поскольку площади эпюр и ординаты имеют общий знак.
Определяем, далее, и остальные коэффициенты уравнений, перемножая эпюры с соответствующими номерами:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Подставляем найденные коэффициенты в канонические уравнения. После сокращений получаем:
 ,
,  ,
, 
Решая эти уравнения, находим:
 ,
,  ,
, 
Раскрытие статической неопределимости на этом заканчивается.

Рис.8. Суммарная эпюра изгибающих моментов.
Эпюра изгибающих моментов может быть получена наложением на эпюру моментов заданных сил трех единичных эпюр, увеличенных соответственно в  ,
,  и
и  раза Суммарная эпюра изгибающих моментов представлена на рис. 8. Там же пунктиром показана форма изогнутой оси рамы.
раза Суммарная эпюра изгибающих моментов представлена на рис. 8. Там же пунктиром показана форма изогнутой оси рамы.
Решение статически неопределимых задач
Содержание:
Стержневая система в широком смысле слова — это всякая конструкция, состоящая из элементов, имеющих форму бруса. К таким конструкциям, в частности, относятся фермы, рамы, балки.
Напомним, что статически неопределимыми называют конструкции (стержневые системы) реакции опор и внутренние силовые факторы, в которых, не могут быть определены при помощи уравнений равновесия (статики).
Статически неопределимые системы при растяжении-сжатии.
Цель расчета бруса и стержневой системы (состоящей из отдельных брусьев — стержней), как и любой конструкции — определение размеров поперечных сечении стержней, при которых обеспечивается прочность или жесткость, или и то и другое. Исходя из условий прочности и жесткости при центральном растяжении-сжатии, видим, что в первую очередь необходимо знать экстремальное значение продольной силы.
На рис. 13.1 а стержень опирается на две жесткие опоры. Возникают две реакции  и
и  (рис. 13.1 б), величина и направление которых неизвестны, т.к. можно составить только одно уравнение равновесия. В уравнении — два неизвестных осевых усилия:
(рис. 13.1 б), величина и направление которых неизвестны, т.к. можно составить только одно уравнение равновесия. В уравнении — два неизвестных осевых усилия:

Задача один раз статически неопределима. Одна связь (опора) — «лишняя».
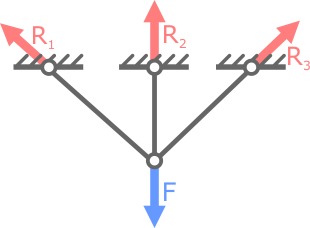
На рис. 13.1 в — стержневая система, составленная из трех стержней, соединенных шарнирно.

Один раз статически неопределимые системы
Пример решения задачи 1
В стержнях действуют три усилия, направленные вдоль этих стержней. Можно составить только два уравнения равновесия (рис. 13.1 г):

Задача один раз статически неопределима, одна связь (стержень) — «лишняя».
Возможно вам будут полезны данные страницы:
«Лишними» такие связи называют потому, что они не являются необходимыми обеспечения равновесия конструкции и ее геометрической неизменяемости (деформа-стержней и соответствующие ей перемещения отдельных точек систать только от действия внешних сил).
Наличие этих связей обусловлено требованиями к прочности и жесткости конструкции или условиями ее работы.
Для решения задачи по определению неизвестных усилий (говорят — для раскрытия статической неопределимости) необходимо составить дополнительные уравнения. Их количество равно степени статической неопределимости. неизвестных или степень статической неопределимо разностью между числом неизвестных усилий и числом статики. Дополнительные уравнения составляются на основе общего принципа: услов! iccTHocTH деформаций: т.к. стержни соединяются между собой определенным обршарнирно, жестко или в соединении имеются некоторые зазоры, стержни этой cистемы деформируются совместно.
Методику раскрытия статической неопределимости рассмотрим на примере системы (рис. 13.1 в).
Примем, что площадь поперечного сечения боковых стержней одинакова  а средний стержень имеет площадь
а средний стержень имеет площадь 
- 1. Силовая сторона задачи. Составляют уравнения равновесия (в данном случае -два). Они нами составлены ранее. Имеем три неизвестных усилия и два уравнения статики. Система один раз статически неопределима.
- 2. Геометрическая сторона задачи. Рассмотрим перемещения стержней, сходящихся в точке
 (рис. 13.2). Под действием внешней силы исследуемая точка переместится в положение Концы стержней соединены шарнирно в точке поэтому они получат соответствующие удлинения. Причем эти стержни деформируются совместно, в соответствии с геометрией системы.
(рис. 13.2). Под действием внешней силы исследуемая точка переместится в положение Концы стержней соединены шарнирно в точке поэтому они получат соответствующие удлинения. Причем эти стержни деформируются совместно, в соответствии с геометрией системы.
 (рис. 13.2). Под действием внешней силы исследуемая точка переместится в положение
(рис. 13.2). Под действием внешней силы исследуемая точка переместится в положение  Концы стержней
Концы стержней  соединены шарнирно в точке
соединены шарнирно в точке  поэтому они получат соответствующие удлинения. Причем эти стержни деформируются совместно, в соответствии с геометрией системы.
поэтому они получат соответствующие удлинения. Причем эти стержни деформируются совместно, в соответствии с геометрией системы. 
Мысленно рассоединим стержни в ненагруженном состоянии (в т.  и соединим их в положении после нагружения (в т.
и соединим их в положении после нагружения (в т.  Концы крайних стержней переместятся по дуге из т.
Концы крайних стержней переместятся по дуге из т.  соответственно в т.
соответственно в т.  и, удлинившись, соединятся в т.
и, удлинившись, соединятся в т.  Вертикальное перемещение точки
Вертикальное перемещение точки  весьма мало; угол
весьма мало; угол  равен углу
равен углу  дуги можно заменить прямыми, поэтому углы
дуги можно заменить прямыми, поэтому углы  — прямые.
— прямые.
Ввиду симметрии системы, абсолютные удлинения крайних стержней будут равны между собой:  Геометрически эти деформации определяются отрезками
Геометрически эти деформации определяются отрезками  Средний стержень удлинится на величину отрезка
Средний стержень удлинится на величину отрезка  и его удлинение
и его удлинение 
Рассматривая прямоугольные треугольники  можем записать соотношение сторон:
можем записать соотношение сторон: 
Уравнение (13.2) и есть уравнение совместности деформаций рассматриваемой системы.
3. Физическая сторона задачи. В уравнении совместности деформаций выразим абсолютную деформацию через продольные силы по закону Гука:

Ввиду малости перемещений длина стержней мало меняется и 
После преобразований получим зависимость

4. Решение системы уравнений (синтез). Решаем систему уравнений (13.1 и 13.3) и после преобразований получим зависимости, с помощью которых определяются искомые усилия в стержнях:

Видим, что с увеличением площади среднего стержня (с увеличением коэффициента  усилие в нем уменьшится; усилия в крайних стержнях также изменятся. В этом отличительная особенность статически неопределимых систем от статически определимых:
усилие в нем уменьшится; усилия в крайних стержнях также изменятся. В этом отличительная особенность статически неопределимых систем от статически определимых:
повышение жесткости  одних элементов приводит к увеличений усилий и, обычно, к снижению усилий в других элементах. В статически определимых системах усилия в элементах не зависят от их жесткости.
одних элементов приводит к увеличений усилий и, обычно, к снижению усилий в других элементах. В статически определимых системах усилия в элементах не зависят от их жесткости.
Уравнение равновесия составлено нами ранее:

Рассмотрим геометрическую сторону задачи и составим уравнение совместности деформаций для опорных сечений, в которых перемещения равны нулю.
Отбросим мысленно нижнюю опору (рис. 13.3 б). Это опорное сечение станет свободным и переместится вниз за счет абсолютной линейной деформации  участка длиной
участка длиной  под действием силы
под действием силы  С другой стороны, рассматриваемое опорное сечение — неподвижно, следовательно, перемещение его должно равно нулю. Это условие будет выполняться, если реакция на опоре
С другой стороны, рассматриваемое опорное сечение — неподвижно, следовательно, перемещение его должно равно нулю. Это условие будет выполняться, если реакция на опоре  будет по величине и направлению такой, что абсолютная линейная деформация от ее действия
будет по величине и направлению такой, что абсолютная линейная деформация от ее действия  окажется равной по величине и противоположной по направлению деформации
окажется равной по величине и противоположной по направлению деформации  Условие совместности деформаций запишется в виде:
Условие совместности деформаций запишется в виде:
 По закону Гука:
По закону Гука:

Таким образом,  Статическая неопределимость раскрыта.
Статическая неопределимость раскрыта.
13.1.1. Расчеты в связи с наличием натягов при сборке конструкций. На практике встречаются и другие задачи, например связанные с неточностью изготовления элементов (стержней).
Неточность изготовления (даже незначительные погрешности) требует приложения дополнительных усилий для сборки узла, при этом возникают натяги и соответствующие монтажные напряжения.
Пример 1 — средний стержень в стержневой системе изготовлен короче проектного размера на малую величину  (рис. 13.4 а). Для сборки стержней в узле
(рис. 13.4 а). Для сборки стержней в узле  необходимо средний стержень растянуть, а крайние стержни сжать (рис. 13.4 6).
необходимо средний стержень растянуть, а крайние стержни сжать (рис. 13.4 6).


Неизвестны два усилия. Задача 1 раз статически неопределима. (13.10) Рассмотрим геометрическую сторону задачи (рис. 13.4 в). Крайние стержни будут укорачиваться на величину  а средний стержень удлинится на величину
а средний стержень удлинится на величину  Тогда уравнение совместности деформаций запишется в виде:
Тогда уравнение совместности деформаций запишется в виде:

Ход дальнейшего решения аналогичен порядку решения в предыдущих примерах. Видим, что средний стержень, еще до нагружения внешней силой будет растянут некоторой нагрузкой, т.е. напряжения от натяга будут суммироваться с напряжениями от эксплуатационных нагрузок, что не учитывается в обычных расчетах и может привести к потере прочности.
В качестве примера положительного эффекта от натяга можно привести примеры монтажа бандажа на колесо (металлическое кольцо разогревается и насаживается на колесо, при охлаждении кольцо обжимает колесо), а также предварительно напряженные железобетонные конструкции (в растянутой зоне бетонной плиты располагают предварительно напряженную сжимающими напряжениями стальную арматуру).
Пример решения задачи 2.
Стержень, имеющий жесткость  изготовлен короче заданной длины на величину
изготовлен короче заданной длины на величину  (рис. 13.5 а). Вид расчетной схемы и порядок решения будут зависеть от величины перемещения нижнего сечения (определяемого величиной и положением по длине силы
(рис. 13.5 а). Вид расчетной схемы и порядок решения будут зависеть от величины перемещения нижнего сечения (определяемого величиной и положением по длине силы  а также жесткостью стержня):
а также жесткостью стержня):
а) величина перемещения нижнего сечения меньше величины зазора — абсолютная линейная деформация стержня  Задача статически определима.
Задача статически определима.
б) величина перемещения нижнего сечения больше или равна величине зазора — абсолютная линейная деформация стержня  Задача статически неопределима.
Задача статически неопределима.

Таким образом, в первую очередь, необходимо определить величину перемещения нижнего сечения, которое будет определяться деформацией участка бруса длиной  от действия силы
от действия силы 

Решение для случая  традиционно для решения статически определимых задач.
традиционно для решения статически определимых задач.
В случае, если  необходимо раскрыть статическую неопределимость.
необходимо раскрыть статическую неопределимость.
На опорах возникнут две реакции, величины которых неизвестны (рис. 13.5 б). Уравнение равновесия:

Уравнение совместности деформаций получим, рассматривая схему (рис. 13.5 б):

В соответствии с законом Гука

Получаем:  Статическая неопределимость раскрыта.
Статическая неопределимость раскрыта.
Расчеты в связи с изменением температуры. Напряжения в сечении стержня также будут возникать даже при отсутствии внешних нагрузок.
Рассмотрим стержень длиной  и площадью
и площадью  изготовленный из материала с модулем упругости
изготовленный из материала с модулем упругости  Оба конца стержня жестко защемлены (рис. 13.6 а). Начальная температура стержня
Оба конца стержня жестко защемлены (рис. 13.6 а). Начальная температура стержня  Определить напряжения, которые возникнут в сечении стержня, если он нагревается до температуры
Определить напряжения, которые возникнут в сечении стержня, если он нагревается до температуры  Пусть градиент температуры будет положительным:
Пусть градиент температуры будет положительным:

Как известно, при нагреве материалы расширяются, т.е. стержень будет стремиться удлиниться и распирать опорные сечения, но из-за наличия этих жестких опор, в них возникнут реакции 

Уравнение равновесия: 
Стержень один раз статически неопределим.
В связи с жестким опиранием, длина стержня  изменяться не будет. Т.е. перемещения опорных сечений равны нулю, следовательно, температурная линейная деформация
изменяться не будет. Т.е. перемещения опорных сечений равны нулю, следовательно, температурная линейная деформация  отсутствие одной из опор, например правой (рис. 13.6 б), стержень удлинится на величину
отсутствие одной из опор, например правой (рис. 13.6 б), стержень удлинится на величину  Это удлинение должно компенсироваться абсолютной линейной деформацией от действия реакции
Это удлинение должно компенсироваться абсолютной линейной деформацией от действия реакции 
Уравнение совместности деформаций: 
По известной из курса физики формуле определим температурную деформацию стержня:

где  — коэффициент линейного температурного расширения материала стержня, град
— коэффициент линейного температурного расширения материала стержня, град
По закону Гука  Сила сжимает стержень!
Сила сжимает стержень!
Приравняв полученные зависимости, определим значение реакции на опоре и соответствующие температурные напряжения:
 Отметим, что температурные (при нагреве стержня) напряжения по знаку — сжимающие. Следовательно, в случае охлаждения такого стержня
Отметим, что температурные (при нагреве стержня) напряжения по знаку — сжимающие. Следовательно, в случае охлаждения такого стержня  нормальные напряжения будут растягивающими. Кроме того, видим, что на величину напряжений не влияет длина стержня. Эти обстоятельства следует учитывать в случае использования хрупких материалов, а также, если стержень подвергается действию изменяющихся по величине и знаку температур.
нормальные напряжения будут растягивающими. Кроме того, видим, что на величину напряжений не влияет длина стержня. Эти обстоятельства следует учитывать в случае использования хрупких материалов, а также, если стержень подвергается действию изменяющихся по величине и знаку температур.
Отметим, что на практике встречаются достаточно сложные схемы стержневых систем, и в каждом конкретном случае задача сводится к геометрическому анализу деформаций и составлению соответствующих уравнений совместности деформаций.
В заключение рассмотрим еще один пример.
Пример решения задачи 2.
Абсолютно жесткий брус (рис. 13.7 а) на стержнях, прикрепленных шарнирами, и нагружен силой  Площадь стержней, соответственно, равна
Площадь стержней, соответственно, равна  Длина стержней
Длина стержней  Определить значение допускаемой силы
Определить значение допускаемой силы  из расчета по допускаемым напряжениям и из расчета по разрушающим (предельным) нагрузкам. Материал стержней — сталь
из расчета по допускаемым напряжениям и из расчета по разрушающим (предельным) нагрузкам. Материал стержней — сталь 

Можно составить два уравнения равновесия для силовой схемы (рис. 13.7 б). Т.к. стержни соединены с жестким брусом посредством шарниров, то усилия в стержнях будут направлены вдоль оси этих стержней:

Первое из них включает и неизвестную реакцию, т.е. имеем три неизвестных. Во втором уравнении неизвестных два — усилия  в стержнях. Следовательно, в решении удобнее использовать второе уравнение равновесия.
в стержнях. Следовательно, в решении удобнее использовать второе уравнение равновесия.
Рассмотрим геометрическую сторону задачи (рис. 13.7 в). Под действием внешней силы  брус, оставаясь прямым (абсолютно жесткий брус — не деформирующийся), повернется вокруг шарнира
брус, оставаясь прямым (абсолютно жесткий брус — не деформирующийся), повернется вокруг шарнира  на некоторый угол. Стержни в местах крепления удлинятся, т.е. точки
на некоторый угол. Стержни в местах крепления удлинятся, т.е. точки  и
и  переместятся вертикально в положения
переместятся вертикально в положения  Отрезки
Отрезки  — абсолютные линейные деформации стержней. Из подобия треугольников
— абсолютные линейные деформации стержней. Из подобия треугольников  имеем:
имеем:

Получили уравнение совместности деформаций.
Подставляем в полученное уравнение усилия в соответствии с формулой закона Гука (физическая сторона задачи).

Решаем систему уравнений  Получаем значения усилий в стержнях в долях силы
Получаем значения усилий в стержнях в долях силы 

Расчет по допускаемым напряжениям.
Из условия прочности  с учетом, что максимальные нормальные напряжения возникают во втором стержне, имеем:
с учетом, что максимальные нормальные напряжения возникают во втором стержне, имеем:

Решаем уравнении относительно силы 

Расчет по разрушающей нагрузке (см. 5.2.2).
Материал стержней — сталь, т.е. пластичный материал. Следовательно, после достижения напряжения во втором стержне (как в более нагруженном) значения предела текучести, этот стержень нагружаться не будет (напряжения не растут, увеличиваются деформации — см. диаграмму растяжения на площадке текучести). Нагрузку будет воспринимать первый стержень. Таким образом,  и уравнение (5.30) примет вид:
и уравнение (5.30) примет вид: 

Откуда получаем значение силы, при котором в обоих стержнях напряжения достигнут предела текучести — предельная грузоподъемность системы:

Разделим предельное значение силы на коэффициент запаса  и получим допускаемое значение силы:
и получим допускаемое значение силы:

Видим, что при расчете во втором случае допускаемая нагрузка выше, чем в первом на величину  т.е. расчет по разрушающим нагрузкам дает возможность в большей степени использовать свойства материала и особенности стержневой системы.
т.е. расчет по разрушающим нагрузкам дает возможность в большей степени использовать свойства материала и особенности стержневой системы.
Основы расчета статически неопределимых систем, работающих на изгиб. Анализ структуры простейших стержневых систем
Указанный анализ проведем на примере рам. В зависимости от взаимного расположения осей стержней и силовых плоскостей, рамы подразделяются на:
плоские стержневые системы (рамы, балки) — оси стержней и все внешние силы лежат в одной плоскости (рис. 13.8 а, б)\
плоско-пространственная системы — оси составляющих элементов в недеформиро-ванном состоянии лежат в одной плоскости, а внешние нагрузки лежат в другой — перпендикулярной плоскости (рис. 13.8 в);
пространственная система — силы и оси стержней могут находиться в произвольно расположенных плоскостях (рис. 13.8 г).

Понятие о степенях свободы и связях. Известно, что в пространстве тело обладает шестью степенями свободы, а в плоскости — тремя. Независимая координата определяющая положение тела в плоскости или пространстве , называется степенью свободы.
Ограничения которые накладываются на тело называются связями. Каждая связь снимает одну степень свободы.
Количество связей накладывемых на тело ( стержневую систему) может быть любым . Для обеспечения равновесия и неподвижности тела в плоскости или пространстве необходимо и достаточно снять соответствующие количество степеней свободы — иначе говоря наложить соответсвующие число связей  Эти связи — необходимые .
Эти связи — необходимые .
Всякая связь наложенная сверх необходимой — дополнительная ( лишняя) связь . В сопротивлении материалов и строительной механике связи разделяются на внешние ( опорные)  и внутренние
и внутренние 
Опорные связи — связи, накладываемые опорными устройствами, (рис. 13.9 а):
• шарнирно-подвижная опора накладывает одну связь (снимает одну степень свободы);
• шарнирно-неподвижная — соответственно две;
• в заделке на опорное сечение стержня накладывается три связи.
Внутренние связи ограничивают взаимное перемещение стержней в сечениях, где они соединяются (рис. 13.9 б):
• жесткое соединение двух стержней накладывает три связи; • шарнирное соединение двух стержней — две связи;
• три стержня, соединенные жестко, — шесть связей;
• три стержня, соединенные шарнирно, — четыре связи. Таким образом, шарнир снимает одну связь.
Анализ рис. 13.9 б позволяет сделать вывод о том, что шарнир, включенный в узел, где сходятся  стержней, снижает степень статической неопределимости на
стержней, снижает степень статической неопределимости на 

Определение степени статической неопределимости. Реакции, возникающие в «лишних» связях — «лишние» неизвестные. Уравнений равновесия оказывается недостаточно для решения задачи — определения опорных реакций. Как известно, такие задачи называют статически неопределимыми. Степень статической неопределимости определяется числом лишних связей.
В строительной механике используются различные формулы для определения степени статической неопределимости или числа лишних связей Л. Приведем одну из них:

где  — число стержней (в строительной механике — дисков).
— число стержней (в строительной механике — дисков).
Рассмотрим примеры стержневых систем — плоских рам (рис. 13.10) и определим степень их статической неопределимости расчетом по формуле (13.18).
число лишних связей  т.е. система статически определима;
т.е. система статически определима;
 т.е. система 2 раза статически неопределима (внешним образом, т.к. лишними являются 2 опорные связи);
т.е. система 2 раза статически неопределима (внешним образом, т.к. лишними являются 2 опорные связи);
 т.е. система 3 раза статически неопределима (внутренним образом, т.к. лишними являются 3 внутренние связи).
т.е. система 3 раза статически неопределима (внутренним образом, т.к. лишними являются 3 внутренние связи).
Заметим, что жесткий замкнутый контур трижды статически неопределим (внутренним образом);
 т.е. система 6 раз статически неопределима (3 раза внешним образом и 3 раза — внутренним образом). Заметим, что в данной схеме фактически имеем два жестких замкнутых контура;
т.е. система 6 раз статически неопределима (3 раза внешним образом и 3 раза — внутренним образом). Заметим, что в данной схеме фактически имеем два жестких замкнутых контура;
Геометрическая и кинематическая неизменяемость. Геометрический и кинематический анализ стержневых систем подробно излагается в дисциплине «Строительная механика».
Под действием нагрузок сооружение (стержневая система) деформируется, и его точки перемещаются (при этом изменяется также и форма сооружения).
Если указанные перемещения возможны только за счет деформации стержней (элементов сооружения), то стержневая система называется геометрически неизменяемой (рис. 13.11 а). Иначе говоря, в элементах конструкции должны отсутствовать перемещения точек, не связанные с деформацией этих элементов под действием нагрузки. В сопротивлении материалов и строительной механике рассматриваются только такие конструкции (в том числе и стержневые системы).
а — система соединенных между собой ные перемещения стержней деформации. Геометрически изменяемые системы (рис. 13.11 б) — это по сути механизмы. Перемещения точек элементов такой системы возможны без деформирования стержней (элементов конструкции).
изменяемая система — система соединенных между собой стержней, допускающая конечные перемещения стержней
без их деформации.

Кинематически изменяемая система (ее еще называют мгное мая система)- система соединенных между собой стержней, допускающая мации тела бесконечно малые относительные перемещения, после чего система
становится неизменяемой. Геометрическими признаками мгновенно изменяемых систем являются следующие:
• шарниры или шарнир и стержень находятся на одной прямой;
• стержни параллельны или пересекаются в одной точке.
Метод сил. Основная система.
Для раскрытия статической неопределимости стержневых систем в машиностроении применяют метод сил.
Неизвестными оказываются силы. Отсюда и название «метод сил» (в строительной механике применяется также и метод перемещений).
Метод сил заключается в том, что заданная статически неопределимая система освобождается от лишних связей, а их действие заменяется усилиями по направлению этих связей.
Величина усилий подбирается таким образом, чтобы перемещения по их направлениям соответствовали тем ограничениям, которые накладываются на систему
Рассмотрим метод сил на примере статически неопределимой рамы. Решение задачи (раскрытие статической неопределимости) начинаем с отбрасывания лишних связей. Система освобождается от лишних связей и становится статически определимой.
Статически определимая и геометрически неизменяемая система, полученная из заданной путем отбрасывания «лишних» связей — основная система.
Таких систем можно составить сколь угодно много. Примеры основных систем, составленные для заданной статически неопределимой системы (рис. 13.12 а) приведены на рис. 13.12 б-з. Схема (рис. 13.12 и) — не является основной, т.к. три шарнира располагаются на одной прямой. Это кинематически изменяемая система.

Продолжая решение задачи, в основной системе приложим внешние нагрузки и усилия (силовые факторы) по направлению отброшенных связей, которые мы назвали «лишними» неизвестными. Усилиями по направлению отброшенных связей являются силы и моменты. Силы ограничивают линейные перемещения, а моменты — соответствующие угловые перемещения.
Направление усилий выбирают произвольно:
• вправо или влево;
• по часовой или против часовой стрелки.
Неизвестные усилия обозначаем  — номер силового фактора. Число этих неизвестных будет соответствовать степени статической неопределимости, причем направления этих связей
— номер силового фактора. Число этих неизвестных будет соответствовать степени статической неопределимости, причем направления этих связей  являются взаимными.
являются взаимными.
Основная система, в которой приложены внешние нагрузки и усилия по направлению отброшенных связей называется эквивалентной системой.
Каждой основной системе будет соответствовать своя эквивалентная система (рис.13.13). 
Рассмотрим, например, заданную схему (рис. 13.12 а), выберем для нее основную (рис. 13.12 б) и изобразим эквивалентную системы (рис. 13.14). В заданной схеме линейные перемещения (горизонтальное и вертикальное) на опоре  и линейные и угловое перемещения в сечении
и линейные и угловое перемещения в сечении  на верхнем ригеле запрещены. Но они же разрешены в основной системе. Неизвестные усилия, показанные в эквивалентной системе, по величине и направлению должны обеспечить равенство нулю указанных перемещений.
на верхнем ригеле запрещены. Но они же разрешены в основной системе. Неизвестные усилия, показанные в эквивалентной системе, по величине и направлению должны обеспечить равенство нулю указанных перемещений.
Взаимное смещение точек системы условимся обозначать следующим образом
 где:
где:
первый индекс — направление по которому определяется перемещение, второй индекс — причина, вызвавшая это перемещение,
 — направление перемещения (по направлению неизвестных сил
— направление перемещения (по направлению неизвестных сил 
 — сила, вызвавшая перемещение (неизвестные силы
— сила, вызвавшая перемещение (неизвестные силы 
 — любая система внешних нагрузок.
— любая система внешних нагрузок. 
В точках  (рис. 13.14) перемещения будут определяться действием всех сил, приложенных к системе — как внешних нагрузок
(рис. 13.14) перемещения будут определяться действием всех сил, приложенных к системе — как внешних нагрузок  так и неизвестных усилий
так и неизвестных усилий  При этом, в соответствии с особенностями расчетной схемы, эти перемещения должны быть равны нулю. Запишем, систему уравнений
При этом, в соответствии с особенностями расчетной схемы, эти перемещения должны быть равны нулю. Запишем, систему уравнений 
Используя принцип независимости действия сил, для любого количества  неизвестных можно записать:
неизвестных можно записать: 
В этих формулах индексы  — номера неизвестных сил.
— номера неизвестных сил.
 — единичное перемещение по направлению силы
— единичное перемещение по направлению силы  от действия единичной силы
от действия единичной силы 
 — единичное перемещение по направлению силы
— единичное перемещение по направлению силы  от действия единичной силы
от действия единичной силы 
 — единичное перемещение по направлению силы
— единичное перемещение по направлению силы  от действия единичной силы
от действия единичной силы 
 — соответственно, перемещения в направлении единичных сил
— соответственно, перемещения в направлении единичных сил  от действия системы внешних сил
от действия системы внешних сил 
Известно, что перемещения пропорциональны действующим силам. Тогда

Обобщая, имеем 
Учитывая (13.21) перепишем (13.20) и получаем:
каноническое уравнение метода сил 
 — главные коэффициенты уравнений,
— главные коэффициенты уравнений,
 — побочные коэффициенты уравнений (по теореме Максвелла их значения попарно равны),
— побочные коэффициенты уравнений (по теореме Максвелла их значения попарно равны),
 — свободные члены уравнений.
— свободные члены уравнений.
Количество записываемых канонических уравнений метода сил соответствует количеству «лишних» неизвестных (степени статической неопределимости). Остается определить коэффициенты уравнений и, решив систему уравнений, найти значения и направления

Для понимания геометрического смысла коэффициентов уравнений рассмотрим два раза статически неопределимую раму (рис. 13.15), где графически покажем рассмотренные выше перемещения.
Коэффициенты определяются методом Мора, чаще перемножением эпюр по способу Верещагина.
При определении коэффициентов канонических уравнений методом перемножения эпюр (по Верещагину):
1. Строим единичные эпюры изгибающих моментов. Единичные эпюры строятся для основной системы от каждого «лишнего» неизвестного, т.е. в основной системе поочередно прикладываются неизвестные, равные единице, определяются реакции и строится единичная эпюра.

Единичных эпюр, должно быть столько, какова степень статической неопределимости рамы.
Получим единичные эпюры изгибающих моментов 
2. Строим грузовую эпюру изгибающих моментов. Эта эпюра также строится для основной системы: в этой системе прикладываются все внешние нагрузки (силы, моменты, распределенные нагрузки), которые имеются на заданной схеме, определяются опорные реакции и стоится грузовая эпюра 

3. Перемножаем эпюры по способу Верещагина и находим значения коэффициентов канонических уравнений:
главные коэффициенты получаем, перемножая единичные эпюры «сами на себя», т.е. в качестве грузовой рассматривается та же единичная эпюра:  Или по формуле Верещагина
Или по формуле Верещагина

побочные коэффициенты определяются перемножением единичных эпюр в соответствии с записью  т.е. одна из единичных условно считается грузовой. По Верещагину
т.е. одна из единичных условно считается грузовой. По Верещагину

свободные члены определяются перемножением грузовой эпюры, поочередно, на единичные в соответствии с записью  По Верещагину
По Верещагину

4. Подставляем значения вычисленных коэффициентов в систему канонических уравнений, решаем ее и определяем значения 
Если значения некоторых неизвестных получаем со знаком минус, это значит, что действительное направление их обратно по отношению к принятому в эквивалентной системе. Желательно при продолжении решения (при построении окончательных эпюр) поменять направление этих неизвестных.
5. В эквивалентной системе вместо неизвестных усилий  прикладываем их значения (в положительном направлении), определяем опорные реакции и строим эпюры
прикладываем их значения (в положительном направлении), определяем опорные реакции и строим эпюры 
6. Проводится проверка правильности расчетов (см. 11.3.2).
Расчет статически неопределимых рамных систем
Рациональный выбор основной системы.
Основная система (удовлетворяющая выше приведенным требованиям) может быть любой, но трудоемкость расчетов будет различной:
а) учитывая, что в процессе решения нужно строить и перемножать эпюры, лучше выбирать такой вариант основной системы, для которого легче эти эпюры строить;
б) протяженность эпюр и их очертания должны быть, по возможности, простыми;
в) для некоторых схем рам возможно использование свойств симметрии и кососим-метрии (рис.13.16).

Положительный эффект учета свойств симметрии и кососимметрии поясним на примере (рис. 13.17). В заданной схеме рамы приложена кососимметричная нагрузка. Основная система и неизвестные усилия являются симметричными.
Прикладываем в основной системе поочередно неизвестные усилия и внешнюю нагрузку и строим эпюры изгибающих моментов. Получаем симметричные и кососимметричные эпюры.
Следовательно, соответствующие коэффициенты канонических уравнений будут равны нулю, и решение этих уравнений упрощается. Например: 

Таким образом, в нашем примере будут равны нулю коэффициенты:

и система канонических уравнений


Следовательно  Получим одно уравнение:
Получим одно уравнение:

Таким образом, вместо решения системы трех уравнений, достаточно решить одно уравнение. Соответственно, вместо трижды статически неопределимой системы имеем один раз статически неопределимую систему.
В том случае, если в рассмотренном примере внешние нагрузки будут приложены симметрично (так, как показано на рис. 13.16 ), то и эпюра  будет симметричной. Тогда
будет симметричной. Тогда

Получаем систему уравнений

Видим, что в этом случае только  равно нулю, т.е. необходимо решать систему двух уравнений.
равно нулю, т.е. необходимо решать систему двух уравнений.
Проверка правильности расчетов.
Проверка должна проводиться на всех этапах решения:
• правильность выбора основной системы; соответствие эквивалентной системы выбранной основной; правильность определения реакций во всех расчетных схемах; правильность построения эпюр: единичных и грузовой эпюр изгибающих моментов;
правильность определения коэффициентов канонических уравнений; правильность решения системы уравнений;
• правильность построения окончательных эпюр 
Однако, подтверждением правильности решения задачи, является так называемая деформационная проверка. Деформационная проверка заключается в том, что исполнитель расчета должен убедиться, что перемещения по направлению любой из отброшенных связей.
Для этого окончательную эпюру изгибающих моментов перемножают поочередно на каждую из единичных эпюр. И желательно на те единичные, которые не использовались в расчете, т.е. для другой основной системы. Более надежной является проверка, которая проводится путем сравнения некоторых сумм коэффициентов уравнений (полученных в расчете) и результатов перемножения эпюр.
Дополнительно строят суммарную единичную эпюру  Ее легко построить графически, суммировав единичные эпюры
Ее легко построить графически, суммировав единичные эпюры 
А) построчная проверка заключается в сравнении сумм коэффициентов по строкам с результатом перемножения суммарной единичной эпюры с каждой из единичных:

Б) универсальная проверка заключается в сравнении суммы всех главных  побочных
побочных  коэффициентов с результатом перемножения суммарной единичной эпюры самой на себя:
коэффициентов с результатом перемножения суммарной единичной эпюры самой на себя:
 Рассмотрим пример расчета статически неопределимой плоской рамы методом сил.
Рассмотрим пример расчета статически неопределимой плоской рамы методом сил.
Для рамы (рис. 13.18 а) построить эпюры  Определить вертикальное перемещение точки
Определить вертикальное перемещение точки 

1. Определяем степень статической неопределимости

2. Выбираем основную систему и строим для нее эквивалентную систему
3. Записываем систему из двух канонических уравнений метода сил:

4. Строим единичные и грузовую эпюры изгибающих моментов. Для уменьшения объема рисунка совместили единичные и грузовую схемы с соответствующими эпюрами.
5 Метод Верещагина определяем коэффициенты канонических уравнений

Коэффициенты вида  имеют размерность
имеют размерность  В данной задаче все коэффициенты безразмерны, т.к. нагрузки и размеры заданы в общем виде. При перемножении эпюр учитываем общие границы участков.
В данной задаче все коэффициенты безразмерны, т.к. нагрузки и размеры заданы в общем виде. При перемножении эпюр учитываем общие границы участков.
6. Подставляем найденные значения коэффициентов в систему канонических уравнений. Определяем значения 

7. Прикладываем найденные значения неизвестных усилий в эквивалентной системе (рис. 13.18 б). Вслучае если найденное значение неизвестного усилия получаем со знаком (-), его направление меняем на противоположное.
8. Строим эпюры 
9. Контроль правильности построения эпюр и всего расчета (деформационная проверка).
9.1. Перемножаем по методу Верещагина эпюру  поочередно на единичные эпюры
поочередно на единичные эпюры  и определяем вертикальное и горизонтальное перемещения шарнирно неподвижной опоры.
и определяем вертикальное и горизонтальное перемещения шарнирно неподвижной опоры.
Перемножим эпюры 

Погрешность расчета (в сравнении с нулем): 
Перемножим эпюры 

Погрешность расчета (в сравнении с нулем): 
Решение выполнено правильно. Рассмотрим другой возможный вариант основной системы (рис. 13.19). 
Видим, что очертания эпюр совпадают с такими же единичными эпюрами на рис. 13.18 (отличаются только значения ординат на эпюре  Следовательно, и результаты перемножения совпадут.
Следовательно, и результаты перемножения совпадут.
Правильность решения задачи подтверждается.
Проведем проверки, рекомендованные ранее. Для этого построим суммарную единичную эпюру  (рис. 13.20), сложив единичные эпюры
(рис. 13.20), сложив единичные эпюры  (см. рис. 13.18).
(см. рис. 13.18). 

 Универсальная проверка:
Универсальная проверка:

Результаты проверки подтверждают правильность решения задачи.
На странице -> решение задач по сопротивлению материалов (сопромат) собраны решения задач и заданий с решёнными примерами по всем темам сопротивления материалов.
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
http://toehelp.ru/theory/sopromat/38.html
http://natalibrilenova.ru/reshenie-staticheski-neopredelimyih-zadach/