Устройство автомобилей
Уравнение движения автомобиля
Силовой баланс при прямолинейном движении автомобиля
В предыдущей статье рассмотрены все силы, действующие на автомобиль во время его прямолинейного движения – сила тяги Рт , сила тяжести G , сила сопротивления воздуха Рω , касательные Rx и нормальные Ry составляющие реакции дороги, силы инерции Pj , силы сопротивления подъему Pα , силы сопротивления качению колес Pf , и (в случае движения автопоезда) сила Рпр на буксирном крюке.
Эти силы можно разделить на две группы – силы, обеспечивающие движение автомобиля, и силы сопротивления, препятствующие этому движению. В общем случае лишь одна сила обеспечивает его движение – сила тяги Рт , приложенная к ведущим колесам. В частных случаях реально помогать движению автомобиля могут еще три силы – сила тяжести (при движении под уклон), сила инерции и сила попутного ветра. Тем не менее, эти силы при составлении динамического баланса тоже следует отнести к силам сопротивления движению автомобиля, учитывая лишь их векторное значение для каждого конкретного случая..
Спроектировав все силы на плоскость опорной поверхности автомобиля, получим уравнение динамики прямолинейного движения:
Очевидно, что движение возможно лишь в том случае, если сила тяги Рт будет больше суммы сил Pψ , Pj , Pω , препятствующих движению. При этом движение возможно до тех пор, пока не начнется пробуксовка ведущих колес, т. е. сила тяги на ведущих колесах не превысит значение, при котором не будет иметь место сцепление шин с поверхностью дороги.
Сила тяги по сцеплению
Сила тяги образуется касательными реакциями дороги. Эти реакции представляют собой силы трения и силы зацепления, при этом силы зацепления возникают на деформируемых грунтах. Сила тяги ведущего колеса, которую можно реализовать для движения автомобиля на данном дорожном покрытии или грунте, имеет предел, зависящий от сцепных свойств шины.
Предельные значения силы тяги, которые можно реализовать по сцепным свойствам дороги, называют силой тяги по сцеплению Pφ . Основными факторами, влияющими на силу тяги по сцеплению, являются:
- нагрузка на ведущие колеса (сцепная нагрузка) и ее распределение по колесам;
- качество и состояние дорожного покрытия (грунта);
- удельное давление шин на дорогу;
- тип силовой передачи;
- состояние протектора шин.
Рассмотрим влияние каждого из этих факторов на силу тяги по сцеплению.
Сцепная нагрузка
При увеличении нагрузки на колесо увеличивается сила трения и сила зацепления. Сила тяги по сцеплению прямо пропорциональна сцепной нагрузке Gφ или нормальным реакциям на ведущих колесах:
где φx – коэффициент продольного сцепления колеса с опорной поверхностью.
А поскольку сила тяги определяется максимальным значением касательной реакции дороги, которая пропорциональна Rz , то можно записать:
где Rx max – максимально возможная продольная реакция по сцеплению.
Коэффициент φx определяется экспериментальным путем чаще всего при скольжении колеса в тормозном режиме, т. е. при протаскивании полностью заторможенного колеса:
Дорожное покрытие
Качество и состояние дорожного покрытия являются решающими факторами, влияющими на коэффициент сцепления φx . При движении автомобиля по дороге с твердым покрытием коэффициент продольного сцепления колеса с опорной поверхностью зависит от шероховатости и влажности дороги, наличия пыли и грязи. При этом даже тонкий слой воды на дорожном покрытии может не только существенно снизить φx , но и создавать подъемную силу, еще больше снижая сцепление шины с дорогой. Такой же и даже более выраженный эффект может создавать жидкая грязь на дороге.
Следует учитывать, что подъемная сила, возникающая при движении по мокрым и грязным дорогам, пропорциональная квадрату скорости движения автомобиля, и при большой скорости может вызвать аквапланирование, когда полностью прерывается контакт между шинами и дорогой.

Удельное давление на дорогу
Удельное давление шины на дорогу определяется площадью опорной поверхности шины и весом автомобиля, приходящимся на данное колесо. Регулировать удельное давление шины на дорогу можно изменением давления в шине – при снижении давления увеличивается площадь опорной поверхности и удельное давление снижается, и наоборот – при увеличении давления воздуха в шине уменьшается площадь опорной поверхности, что приводит к увеличению удельного давления колеса на дорогу.
Очевидно, что увеличение опорной поверхности шины с дорогой приводит к увеличению силы сцепления, особенно, на грунтовых дорогах, поскольку в зацеплении участвует большее количество грунтозацепов протектора покрышки.
При движении по влажным дорожным покрытиям повышенное удельное давление (давление в шинах) может благотворно сказаться на сцеплении шин с дорогой из-за выдавливания влаги из-под колес.
Удельное давление, оказываемое колесом на опорную поверхность, в некоторой степени зависит и от размеров шины – от ее диаметра и ширины. При увеличении диаметра колеса сегмент дуги, по которой осуществляется контакт шины с дорогой, имеет бȯльшую длину, чем опорный сегмент маленького колеса. Широкая шина создает колесу опору большей площади, чем узкая.
Влияние на сцепные свойства типа трансмиссии
Многочисленные опыты показали, что применение бесступенчатых трансмиссий обеспечивает повышение силы тяги по сцеплению. Главную роль здесь играет возможность плавного изменения величины тяговых моментов на ведущих колесах, без рывков и резких толчков.
В трансмиссиях, оснащенных ступенчатыми коробками передач, потеря сцепления колес с опорной поверхностью чаще всего имеет место во время переключения передач, сопровождающихся резким изменением величины крутящего момента на колесах.
Влияние конструкции шин
Важную роль в повышении сцепления колеса с дорогой играют рисунок протектора, а для шин повышенной проходимости размеры (особенно, высота) грунтозацепов протектора. Протектор шин легковых автомобилей обычной проходимости, как правило, имеет мелкий рисунок, обеспечивающий хорошее сцепление с твердым покрытием.
Наименьший коэффициент сцепления при прочих равных условиях у шин с изношенным рисунком протектора. Поэтому использование автомобилей с такими шинами запрещено.
Недостаточная величина коэффициента сцепления является причиной многих дорожно-транспортных происшествий. Для обеспечения безопасности дорожного движения его величина не должна быть меньше 0,4.
На дорогах с низкими сцепными свойствами коэффициент сцепления φx снижается до 0,2 и становится соизмеримым с коэффициентом сопротивления качению f . Это означает,что движение может оказаться невозможным из-за отсутствия запаса силы тяги по сцеплению. Следовательно, условие качения колес без скольжения можно представить в виде
Если сила тяги Рт меньше силы сцепления Рφ , ведущие колеса катятся без буксования. Если сила тяги превысит силу сцепления колес с дорогой, ведущие колеса будут пробуксовывать, а для движения использоваться лишь часть силы тяги, равная φRz . Остальная часть силы тяги вызывает ускоренное вращение буксующих колес. Буксование колес связано со значительными потерями энергии на трение шин о дорогу и разрушение опорной поверхности.

Не менее вредное влияние на сцепную тягу автомобиля и его устойчивость на дороге оказывает скольжение заторможенных колес по твердому дорожному покрытию (блокировка колес). В этом случае изношенные частицы шины, попадая на опорную поверхность колеса и дороги, вызывают эффект «смазки», существенно снижая сцепные свойства шины. Это явление явилось причиной появления тормозных систем с антиблокировочными устройствами (АБС).
Условия возможности движения автомобиля
Согласно уравнению силового баланса (1) равномерное безостановочное движение автомобиля возможно лишь при условии
Выполнение этого условия для безостановочного движения автомобиля необходимо, но недостаточно, поскольку оно возможно лишь при отсутствии буксования ведущих колес.
Учитывая формулу (2) условие безостановочного движения можно выразить так:
Если суммарная сила сопротивления движению больше силы тяги, то двигатель автомобиля заглохнет. Если сила тяги превысит силу сцепления, ведущие колеса начнут пробуксовывать.
Формула (4) справедлива для полноприводных автомобилей, где вертикальная реакция Rz на ведущих колесах равна весу автомобиля. Для переднеприводных автомобилей вместо Rz следует подставить Rz1 , для заднеприводных – Rz2 .
Мощностной баланс автомобиля
Иногда вместо силового баланса, характеризуя возможность движения автомобиля, пользуются мощностным балансом. Мощность силы определяется ее модульной величиной и скоростью v движения тела под действием этой силы. Если умножить все члены уравнения силового баланса (1) на v /1000, получим уравнение мощностного баланса:
где Nт – тяговая мощность:
Nт = Ртv/ 1000 = Мкiтрηтрv/ 1000 r = Nеηтр
(здесь Nе – эффективная мощность двигателя, ηтр – КПД трансмиссии, iтр – передаточное число трансмиссии);
Nα – мощность, затрачиваемая на преодоление подъема:
Nf – мощность, затрачиваемая на преодоление сопротивления качению:
Nω — мощность, затрачиваемая на преодоление сопротивления воздуха:
Nj – мощность, затрачиваемая на преодоление сопротивления разгону:
Nψ – мощность, затрачиваемая на преодоление сопротивления дороги:
Уравнение мощностного баланса устанавливает соотношения между мощностью, подводимой к ведущим колесам автомобиля и мощностью, необходимой для преодоления сопротивления движению автомобиля.
Используя уравнение мощностного баланса строят графики мощностного баланса для движения автомобиля на каждой из передач. Такие графики удобно использовать при сравнительной оценке тяговых свойств автомобиля графическими методами.
Уравнение движения машины.
Для составления уравнения движения машины может быть использована теорема об изменении кинетической энергии:
где dT – изменение кинетической энергии машины,
dA – cумма работ всех внешних сил на бесконечно малом перемещении. Применительно к динамической модели машины это уравнение можно записать:
d  ) = Mпрdj.
) = Mпрdj.
Продифференцируем выражение в скобках, учитывая чтоJПР и w являются переменными, зависящими от j , а также, что w =  .
.
Jпр  +
+ 
 = Мпр. (15.9)
= Мпр. (15.9)
Таким образом, движение машины описывается дифференциальным уравнением, которое обычно не имеет общего аналитического решения.
Оно может быть решено лишь в некоторых частных случаях, либо приближенно при определенных упрощающих допущениях. В первую очередь это зависит от режима работы агрегата.
Основные режимы работы машинного агрегата.
Процесс движения машины в общем случае состоит из трёх фаз:
разбег , установившееся движение и выбег.(рис.15.4).
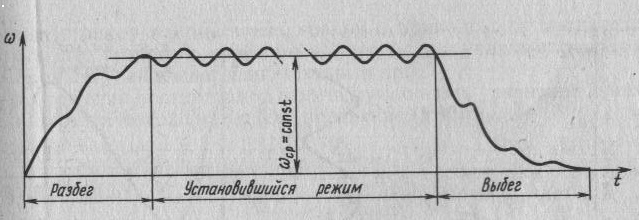
Разбег и выбег относятся к неустановившемуся режиму, который характеризуется непериодическими изменениями скорости главного вала (начального звена динамической модели).
При установившемся неравновесном режиме угловая скорость начального звена изменяется периодически . В частном случае скорость может быть постоянной (равновесное движение).
В установившемся режиме работает большинство технологических и энергетических машин.
Анализ установившегося движения машинного агрегата.
Расчёт маховика.
Технологические машины выполняют технологический процесс в установившемся режиме, который обычно не имеет ограничений по продолжительности. Для машин, содержащих рычажные механизмы, этот режим является неравновесным, при котором кинетическая энергия изменяется периодически, т.е. её значения повторяются через время цикла tц (рис. 16.1). При этом угловая скорость ведущего звена также меняется периодически в зависимости от его положения (рис. 16.2). При этом характер изменения графиков кинетической энергии и угловой скорости обычно не соответствуют друг другу. Периодом изменения, обычно, является один оборот (2p радиан или 360 0 ). Такое движение характеризуют средней угловой скоростью wСР и коэффициентом неравномерности
d =  . (16.1)
. (16.1)
Величина коэффициента неравномерности в технологических машинах мала (d= 0,03…0,05), так как только при этом условии обеспечивается нормальная работа привода. Малость d позволяет использовать при решении уравнения движения приближенные методы.
В данном случае вместо уравнения (15.8) используется
уравнение движения в интегральной форме
 Т = Т — Тн =
Т = Т — Тн =  А . (16.2)
А . (16.2)
Здесь Т и Тн –кинетические энергии машинного агрегата в произвольном и начальном положениях. За начальное положение целесообразно брать то, в котором ведомое звено занимает крайнее положение и его скорость равна 0.
А – сумма работ на данном участке всех внешних сил и моментов. Работа сил трения здесь не учитывается.
Для динамической модели (рис.15.2) после приведения сил и масс уравнение (16.2) приобретает вид
0,5 · J · ω 2 — 0,5 · (  ) 2 · Jн = Ад + Ас . (16.3)
) 2 · Jн = Ад + Ас . (16.3)
Здесь АД =  Мдdφ -работа движущих сил на участке;
Мдdφ -работа движущих сил на участке;
 АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
Для упрощения записи здесь и далее опускаем значок «пр» при приведённых моментах движущих сил МД , сил сопротивления МС и приведённых моментах инерции .
Анализ уравнения (16.3) показывает, что причинами колебаний угловой скорости ведущего звена механизма являются:
а) несоответствие величин приведённого момента МД движущих сил и приведённого момента МС сил сопротивления. Это приводит к появлению избыточной работы
б) непостоянство приведённого момента инерции динамической модели при наличии в механизме масс, совершающих возвратно-поступательное, качательное и сложно-плоское движения.
Величина и характер изменения сил сопротивления задаются при проектировании. Следовательно, путём интегрирования можно в каждом положении механизма определить величину работы Ас. Обозначим работу Ас за период (один оборот кривошипа )  .
.
При установившемся неравновесном движении движущие силы или моменты за период совершают одинаковую работу, т. е.  = — .
= — .
Момент движущих сил МД зависит от угловой скорости ω, однако при малых изменениях скорости можно приближённо принять МД = соnst.
Тогда АД = МД · φ, где 0 ≤ φ ≤ 2π.
Величина движущего момента МД = ( ) / 2π. (16.5)
Изменение кинетической энергии агрегата, равное избыточной работе, определится по зависимости:
Т = АИ = МД · φ + МС dφ. (16.6)
Подставляя в уравнение движения (16.3) зависимости (15.7) и (16.2), после преобразований можно получить
Т = ТС + ТV . (16.7)
Здесь Тc = 0,5Jc (ω 2 —  ) (16.8)
) (16.8)
Тc — изменение кинетической энергии вращающихся масс;
ТV= 0,5·JV·ω 2 — 0,5·JVн·  — изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
— изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
Из-за малости коэффициента неравномерности хода (δ = 0,03…0,05) справедливо приближённое равенство ω ≈ ω н ≈ ω ср .
Поэтому можно принять:
Тv ≈ 0,5 •  (Jv — Jvн). (16.9)
(Jv — Jvн). (16.9)
Отсюда находится в каждом положении механизма приращение кинетической энергии вращающихся масс:
ТC = Т — ТV . (16.10)
Величина ТC, периодически меняясь, достигает в каких-то положениях максимальных  и минимальных
и минимальных  значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
ωср = 0,5(ωmax + ωmin ), можно получить, что наибольший перепад кинетической энергии вращающихся масс
 =
=  —
—  = JС ∙ δ ∙
= JС ∙ δ ∙  . (16.11)
. (16.11)
Если при проектировании задана величина коэффициента неравномерности δ, то из зависимости (16.11) находится необходимая для этого величина Jc приведённого момента инерции вращающихся масс:
Jc = / (δ ∙ ). (16.12)
Величина Jc, получаемая из зависимости (16.12), обычно не может быть обеспечена за счёт приведённого момента инерции Jco имеющихся вращающихся масс агрегата. В этом случае на ведущем валу исполнительного механизма устанавливается маховик с моментом инерции:
Маховик (рис.16.3 ) представляет собой отбалансированное колесо, масса которого сосредоточена, в основном, на ободе. Он является аккумулятором кинетической энергии. Когда работа двигателя оказывается в избытке, маховик накапливает кинетическую энергию, которая потом используется при выполнении технологического процесса. Чем больше Jc (а следовательно, и JМ), тем выше аккумулирующая способность маховика, тем меньше будут колебания ω при колебаниях потока кинетической энергии, тем равномернее будет вращаться ведущее звена механизма.
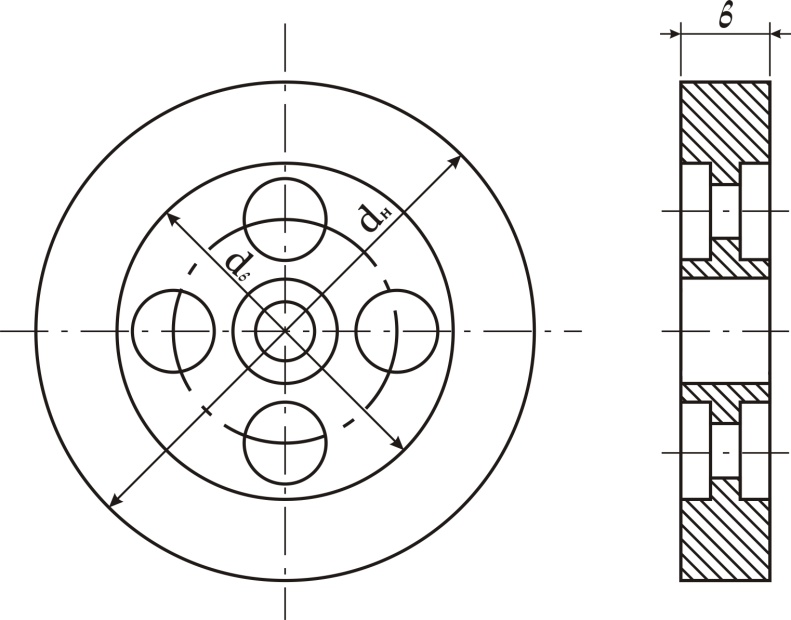 Рис.16.3
Рис.16.3
Отклонение угловой скорости от её среднего значения ωср можно найти, так как известно приращение  кинетической энергии в положении, где ω=ωср .
кинетической энергии в положении, где ω=ωср .
= 0,5( +  ). (16.14)
). (16.14)
В каждом положении ТС —  =
=  — .
— .
Раскрывая это уравнение, получаем
 (16.15)
(16.15)
Представим ω = ωср + Δω. (16.16)
Из уравнения (16.15), используя зависимость (16.16) и принимая приближённо Δω 2 = 0, после преобразований получим:
Δω = ( ТС — ) / (ωср ∙ JC) . (16.17)
Следует отметить, что в данных методических указаниях рассматривается решение уравнения движения для случая, когда не учитывается влияние колебаний угловой скорости на величину движущего момента двигателя.
Однако, имеются машины, в которых влияние скорости на силы и моменты достаточно сильно. К ним относятся, например, асинхронные и шунтовые двигатели, получившие большое распространение в промышленном электроприводе.
В этом случае приведённое выше решение может быть принято, как первое приближение. Уточнённое решение, которое можно получить методом последовательного приближения, приводится в работах [1], [4] . Оно всегда даёт решение с несколько меньшей величиной JC . Это позволяет использовать маховики с меньшим моментом инерции, а следовательно, с меньшими габаритами и металлоёмкостью.
Анализ неустановившегося движения машинного агрегата.
Неустановившейся режим имеет место, когда агрегат пускают в ход и он, набирая скорость, выходит на установившейся режим, а также когда для остановки машины её двигатель отключают и она продолжает двигаться за счёт накопленного запаса кинетической энергии; при этом машина постепенно теряет скорость из-за действия сил трения или каких-либо сил сопротивления, в том числе и специальных тормозных сил (рис.17.1).
В этих случаях нужно знать, насколько быстро происходит переход из неподвижного состояния в рабочее и обратный процесс до полной остановки.
Применительно к транспортным и грузоподъёмным машинам это важно для определения времени разбега и выбега (торможения) , расчёта длины тормозного пути.
Разбег и торможение могут происходить с большим ускорением. Это вызывает значительное динамическое нагружение механизма, что, в свою очередь, может привести к перенапряжениям и даже к поломкам.
Во время разбега и выбега угловая скорость многих машин может проходить через критическую (резонансную) зону. Во избежание динамической перегрузки механизма и возможной аварии проход этой зоны должен быть достаточно быстрым, что надо обеспечить при проектировании, сделав расчёт обеих фаз неустановившегося режима.
При анализе неустановившегося режима следует использовать уравнение движения машинного агрегата в дифференциальной форме (15.9).
Оно выглядит следующим образом:
Jпр + = Мпр. (17.1)
Здесь: Jпр – приведённый к ведущему звену момент инерции всех подвижных звеньев механизма;
Мпр— приведённый момент всех учитываемых сил, действующих в агрегате.
Для определения закона движения при неустановившемся режиме должны быть известны следующие данные: кинематическая схема и размеры механизма; массы и моменты инерции звеньев; механические характеристики сил и моментов; начальные условия движения.
Рассмотрим случай работы агрегата при следующих условиях:
а) Приведённый к ведущему звену момент инерции всех подвижных звеньев механизма Jпр=const.;
б) Механическая характеристика момента движущих сил- линейна (рис.17.2) и представляется (рис.17.2) в виде:
где : М0 – пусковой момент двигателя;
b – коэффициент, характеризующий крутизну спада характеристики;
МН – номинальный развиваемый момент движущих сил, соответствующий номинальной угловой скорости ωН;
в) Приведённый момент сил сопротивления МС= const. (рис.17.2)
(силы трения не учитываются);
г) Предполагается, что двигатель подобран таким образом, что МС=МН,
а ωН соответствует угловой скорости ωуст установившегося режима работы агрегата.
Типичным примером для таких условий является работа при пуске и торможении многих грузоподъёмных устройств с приводом от шунтового двигателя постоянного тока.
В соответствии с заданными условиями уравнение (17.1) запишется в виде:
Jпр = М0— b*ω -МС. (17.3)
Из равенства в точке А моментов МД и МС
Подставляя выражение (17.4) в уравнение движения (17.3) после преобразований получаем:
Используем табличный интеграл : ∫  =(1/b)* ln (a+bx) и
=(1/b)* ln (a+bx) и 
интегрируем уравнение (17.5):
С- постоянная интегрирования.
При t=0, ω=0 . Следовательно С=0.
Преобразовывая уравнение (17.6), получаем уравнение движения агрегата при разгоне:
График изменения угловой скорости при разгоне представлен на рис.17.3.
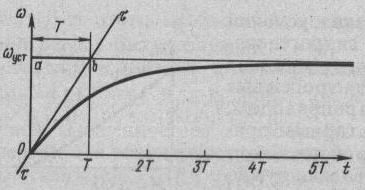
Величина Т , определяемая по формуле (17.6), называется постоянной времени машинного агрегата. Графически на рис.17.3 она представляет собой отрезок ab. Физический смысл её в следующем. Если бы в процессе разгона разница (МД-МС) не уменьшалась, а оставалась бы равной М0 (как в начальный момент), то движение было бы равноускоренным, а угловая скорость достигала бы значения ωуст через время Т.
Теоретически разгон продолжается бесконечно долго. Однако уже при t=3Т отношение ω/ ωуст составит 0,95, при t=4Т оно возрастёт до 0,98, а при t=5Т до 0,995, то есть процесс разгона при t=(4-5)Т практически завершается. Отсюда следует, что если задать время разгона, то можно определить соответствующую величину Jпр, при которой процесс разгона действительно займёт заданное время.
Дата добавления: 2016-01-26 ; просмотров: 2308 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Как определяется уравнение движения машины
Динамическая модель машинного агрегата.
Прямая задача динамики машины, как отмечалось и ранее, является задачей анализа, задачей по определению закона движения механической системы под действием заданных внешних сил. При решении этой задачи параметры машинного агрегата и действующие на него внешние силы известны, необходимо определить закон движения: скорости и ускорения в функции времени или обобщенной координаты. Иначе эту задачу можно сформулировать так: заданы управляющие силы и силы внешнего сопротивления, определить обеспечиваемый ими закон движения машины. Обратная задача — это задача синтеза управления, когда задан требуемый закон движения машины и внешние силы сопротивления, а определяются управляющие силы. При решении задач динамики используются либо уравнения силового равновесия системы — метод кинетостатики, либо уравнения энергетического равновесия — закон сохранения энергии. Для идеальной механической системы, в которой не потерь энергии и звенья абсолютно жесткие, этот закон можно применять в виде теоремы о изменении кинетической энергии. Согласно этой теореме работа всех внешних сил действующих на систему расходуется только на изменение ее кинетической энергии. При этом потенциальные силы — силы веса рассматриваются как внешние


Рассмотрим сложную механическую систему (рис.6.1), состоящую из n подвижных звеньев из которых r — звеньев совершают вращательное движение, j — плоское, k — поступательное. Основная подвижность системы равна W=1 . На систему действуют: f — внешних сил и m — внешних моментов. Движение этой системы определяется изменением одной независимой обобщенной координаты. Такую систему при решении задач динамики можно заменить более простой динамической моделью. Положение звена этой модели определяется обобщенной координатой, а динамические параметры заменяются: инерционные — суммарным приведенным моментом инерции I пр å , силовые — суммарным приведенным моментом М пр å . Эти параметры динамической модели рассчитываются по критериям подобия модели и объекта, которые определяются соответственно из равенства правых и левых частей уравнений изменения кинетической энергии для модели и объекта, т.е.






Уравнения движения динамической модели
Уравнение движения динамической модели в интегральной форме.
Запишем для динамической модели теорему о изменении кинетической энергии

где

и уравнение движения динамической модели в интегральной или энергетической форме

Из этого уравнения после преобразований

получим формулу для расчета угловой скорости звена приведения.
Для машин работающих в режиме пуск-останов

формула принимает вид

Уравнение движения динамической модели в дифференциальной форме.
Продифференцируем полученное выше уравнение по обобщенной координате

где


После подстановки получим

уравнение движения динамической модели в дифференциальной форме.
Из этого уравнения после преобразований

получим формулу для расчета углового ускорения звена приведения.
Для механических систем в которых приведенный момент не зависит от положения звеньев механизма.

Определение параметров динамической модели машины (приведение сил и масс) .
Рассмотрим изображенную на рис. 6.1 механическую систему и ее динамическую модель. Запишем для них уравнение изменения кинетической энергии. Кинетическая энергия:
- для механической системы

- для модели


Суммарная работа внешних сил:
- для механической системы
- для модели


Модель будет энергетически эквивалентна рассматриваемой механической системе, если правые и левые части уравнений изменения кинетической энергии для модели и для системы будут соответственно равны. То есть для левых частей выполняется условие Т с = Т м , а для правых — A å c = A å м . Для того чтобы второе равенство выполнялось в течение всего диапазона изменения обобщенной координаты, необходимо обеспечить не равенство интегралов, а равенство подынтегральных выражений dA å c =dA å м . Подставляя в равенства, записанные ранее выражения для кинетических энергий и работ получим:
для левых частей

для правых частей

Из уравнения для левых частей получаем формулу для определения приведенного суммарного момента инерции динамической модели

Из уравнения для правых частей получаем формулу для определения приведенного суммарного момента динамической модели

Механические характеристики машин.
Механической характеристикой машины называется зависимость силы или момента на выходном валу или рабочем органе машины от скорости или перемещения точки или звена ее приложения.
Рассмотрим примеры механических характеристик различных машин.
Двигатели внутреннего сгорания (ДВС):
- четырехтактный ДВС

Индикаторная диаграмма — графическое изображение зависимости давления в цилиндре поршневой машины от хода поршня.
двухтактный ДВС

Электродвигатели
- асинхронный электродвигатель переменного тока На диаграмме: М дп — пусковой момент; М дн — номинальный крутящий момент; М дк или М дmax — критический или максимальный момент; w дн — номинальная круговая частота вращения вала двигателя; w дхх или w дс — частота вращения вала двигателя холостого хода или синхронная. Уравнение статической характеристики асинхронного электродвигателя на линеаризованном участке устойчивой части
- двигатель постоянного тока с независимым возбуждением

где М д — движущий момент на валу двигателя,
w д — круговая частота вала двигателя ,

Статическая характеристика асинхронного двигателя, выражающая зависимость нагрузки от скольжения, определяется формулой Клосса



Уравнение статической характеристики для двигателя постоянного тока с независимым возбуждением

где k = М дн ( w дхх — w дн ).
В электрических параметрах характеристика записывается в следующем виде

где k M = M дн /I ян — коэффициент момента, k w = (U ян — R ян Ч I ян ) / w дн — коэффициент противоэлектродвижущей силы, U я — напряжение в цепи якоря, R я — сопротивление цепи якоря
Рабочие машины
- поршневой насос

поршневой компрессор

Линии bc и ad — линии сжатия и расширения газа (воздуха) определяются параметрами газа (объемом, давлением и температурой) и в общем виде описываются уравнением политропы p × V n = const , где n — показатель политропы ( 1 n 0 ).
строгальный станок

Механические характеристики определяют внешние силы и моменты, действующие на входные и выходные звенья, рассматриваемой механической системы со стороны взаимодействующих с ней внешних систем и окружающей среды. Характеристики определяются экспериментально, по результатам экспериментов получают регрессионные эмпирические модели, которые в дальнейшем используются при проведении динамических расчетов машин и механизмов.
Пример на определение параметров динамической модели (на приведение сил и масс ).
Дано: Кинематическая схема механизма поршневого насоса( l i , j i ) , М д , F c , m i , I Si ;


1. Определение сил веса G i = m i × g.
2.Определение кинематических передаточных функций.
Простой и наглядный метод определения передаточных функций — графоаналитический метод планов возможных скоростей. При этом в произвольном масштабе строятся планы скоростей для рада положений цикла движения механизма. По отрезкам плана скоростей рассчитываются соответствующие передаточные функции по следующим формулам ( для машины, схема которой изображена на рис.6.8 ):
Передаточные функции:

По этим формулам строятся цикловые диаграммы передаточных функций для рассматриваемого механизма ( см. рис. 6.10 ).

3. Определение суммарного приведенного момента М пр å
Для определения суммарного приведенного момента необходимо просуммировать приведенные моменты от всех внешних сил, действующих на рассматриваемую систему. Приведенный момент от силы равен скалярному произведению вектора силы на вектор передаточной функции точки ее приложения, от момента — произведению момента на передаточное отношение от звена приложения момента к звену приведения. На рассматриваемую систему действуют силы веса звеньев G i , сила сопротивления F с и движущий момент М д . Приведенный момент от этих сил рассчитывается по формуле:


4. Определение суммарного приведенного момента инерции I пр å .
Для определения суммарного приведенного момента инерции необходимо просуммировать приведенные моменты инерции от всех масс и моментов инерции подвижных звеньев рассматриваемой системы. Приведенный момент инерции от массы равен произведению массы на квадрат передаточной функции ее центра, от момента инерции — произведению момента инерции звена на квадрат передаточного отношения от этого звена к звену приведения. Инерционность рассматриваемой системы определяется массами звеньев 2 и 3 и моментами инерции ротора двигателя, редуктора, коленчатого вала, маховика и звена 2. В суммарный приведенный момент инерции входят как составляющие не зависящие от положения механизма, так и составляющие, зависящие от обобщенной координаты. Первые имеют постоянный момент инерции и относятся к первой группе звеньев, момент инерции других — переменный, они образуют вторую группу. Приведенный момент для рассматриваемой системы определяется по формуле:

