3. Доказать, что кривая $x=1+2t+t^2, y=2-5t+t^2, z=1+t^2$
— плоская. Найти уравнение плоскости, в которой лежит эта кривая.
Ответ: $\varkappa=0$, $5x+2y-7z-2=0$.
Краткие теоретические сведения
Соприкосновение $k$-того порядка
Две кривые $$ \gamma_1: \vec_1=\vec_1(t)\,\, \mbox <и>\,\, \gamma_2: \vec_2=\vec_2(t) $$ имеют в общей точке $M_0$ соприкосновение (касание) $k$-того порядка, если в этой точке: \begin \frac_1>
Для неявно заданных кривых — см. формулы в Феденко.
Касательная кривой имеет в точке касания имеет соприкосновение первого порядка.
Соприкасающаяся окружность плоской кривой
Пусть $\gamma$ — плоская кривая, $M_0 (t=t_0)$ — точка на ней.
Окружность, проходящая через точку $M_0$, называется соприкасающейся окружностью кривой $\gamma$ в точке $M_0$, если кривая в этой точке с окружностью имеет соприкосновение второго порядка (не ниже второго порядка).
Центр соприкасающейся окружности называют центром кривизны кривой в заданной точке.
Центр окружности лежит на нормали к кривой. Радиус окружности (радиус кривизны) есть величина, обратная кривизне этой кривой в заданной точке $M_0$: $$ R=1/k(t_0).$$
Эволюта и эвольвента
Эволютой плоской кривой называется огибающая ее нормалей.
Эволюта это геометрическое место центров кривизны плоской кривой.
Эвольвентой плоской кривой $\gamma$ называется такая кривая $\Gamma$ по отношению к которой $\gamma$ является эволютой.
Решение задач
Задача 1 (Феденко № 179)
Докажите, что линии \begin y_1=\mbox\,x, \,\, y_2=x^4-\frac16x^3+x. \end имеют в начале координат касание третьего порядка
Решение задачи 1
Задача 2 (Феденко №369)
Напишите уравнение соприкасающейся окружности линии $y=\mbox\,x$ в точке $A\left(\frac<\pi><2>; 1\right)$.
Решение задачи 2
Радиус соприкасающейся плоскости $R=\displaystyle\frac<1>$. Найдем кривизну для заданной кривой: \begin k = \displaystyle\frac<|y''|><\left(1+(y')^2\right)^<3/2>>=\frac<\mbox\,x><(1+\mbox^2\,x)^<3/2>>. \end \begin k\left(\frac<\pi><2>\right)=1 \,\, \Rightarrow \,\, R=1. \end Учитывая, что окружность касается синусоиды в точке $A\left(\displaystyle\frac<\pi><2>; 1\right)$, радиус окружности равен $1$ и центр окружности лежит на нормали, проведенной в точке касания, получаем следующее уравнение: \begin \left(x-\displaystyle\frac<\pi><2>\right)^2+y^2=1. \end
Задача 3 (Феденко №391)
Составьте уравнения и начертите эволюту кривой \begin x=a\left(\mbox\,\mbox\,\left(\displaystyle\frac<2>\right)+\mbox\,t\right), \,\, y = a\,\mbox\,t. \end
Решение задачи 3
Задача 4 (Феденко №397)
Составьте уравнения эвольвент окружности $x^2+y^2=a^2$ и сделайте рисунок.
Пусть кривая \(\Gamma\) задана натуральным уравнением. Будем предполагать, что в точке \(M\in\Gamma\), где \(\overrightarrow=\textbf(s)\), существует кривизна \(k=k(s)\neq 0\). Тогда радиус кривизны кривой \(\Gamma\) в точке \(M\) равен $$ R=R(s)=\frac<1>.\label $$
Отложим на главной нормали кривой \(\Gamma\) (рис. 22.9) в направлении главной нормали \(\nu=\nu(s)\) отрезок \(MN\) длиной \(R=R(s)\) и назовем точку \(N\) центром кривизны кривой \(\Gamma\) в точке \(M\). Пусть \(\overrightarrow=\rho\).
Так как \(\overrightarrow=R(s)\nu(s)\), то получаем: $$ \boldsymbol<\rho>=\textbf(s)+R(s)\boldsymbol<\nu>(s).\label $$
Рис. 22.9
Используя формулу \eqref и равенство $$ \frac\textbf>>=\frac=k(s)\boldsymbol\nu(s),\nonumber $$ запишем уравнение \eqref в следующем виде: $$ \boldsymbol\rho=\textbf(s)+\frac<1><(k(s))^2>\frac>.\label $$
Предполагая, что во всех точках кривой \(\Gamma\) кривизна отлична от нуля, построим для каждой точки кривой центр кривизны и назовем множество всех центров кривизны кривой \(\Gamma\) эволютой этой кривой.
Если кривая \(\Gamma_1\) — эволюта кривой \(\Gamma\), то кривую \(\Gamma\) называют эвольвентой кривой \(\Gamma_1\). Уравнение эволюты кривой \(\Gamma\), заданной натуральным уравнением, имеет вид \eqref.
Если кривая \(\Gamma\) задана уравнением кривой в векторной форме, то уравнение эволюты этой кривой можно получить, заменив в равенстве \eqref \(k\) и \(\displaystyle\frac\textbf>>\) их выражениями по формулам отсюда и отсюда.
Равенства \eqref задают эволюту кривой \(\Gamma\) в координатной форме.
Приведем без доказательства физическое истолкование эволюты и эвольвенты. Пусть на эволюту натянута гибкая нерастяжимая нить. Если эту нить развертывать, оставляя все время натянутой, то конец нити опишет эвольвенту. Этим можно объяснить термины эволюта («развертка») и эвольвента («развертывающаяся»).
Найти эволюту эллипса \(x=a\cos t,\ y=b\sin t\).
Реферат: Кривизна плоской кривой Эволюта и эвольвента
Название: Кривизна плоской кривой Эволюта и эвольвента Раздел: Рефераты по математике Тип: реферат Добавлен 03:22:43 03 февраля 2011 Похожие работы Просмотров: 178 Комментариев: 32 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать
Кривизна плоской кривой. Эволюта и эвольвента
Реферат по математическому анализу выполнил: студент МГТУ им. Баумана группа Э2 –11 Тимофеев Дмитрий
Для более полного представления о кривизне плоской кривой для начала введём понятие векторной функции скалярного аргумента.
Определение 1. Если каждому значению независимого переменного tÎTÍR , называемого далее скалярным аргументом, поставить в соответствие единственный вектор r(t), то r(t) называют вектор-функцией скалярного аргумента. Вектор r(t) с началом в фиксированной точке O называют радиус-векторм.
Пусть в геометрическом (трёхмерном) пространстве задана прямоугольная декартова система координат Oxyz с ортонормированным базисом i, j, k. Тогда представление
r(t) = x(t)i + y(t)j + z(t)k
является разложением радиус-вектора r(t) в этом базисе, причем x(t), y(t), z(t) – действительные функции одного действительного переменного t с общей областью определения TÍR , называемые координатными функциями вектор-функции r(t).
Введём теперь термин «кривой». Его строге определение связано с понятием вектор-функции r(t), которую будем считать непрерывной на отрезке [a, b] . Пусть в трёхмерном пространстве R3 задана прямоугольная декартова система координат Oxyz с ртонормированным базисом .
Определение 2. Множество ГÌR3 точек, заданных радиус-векторм r(t) = x(t)i + y(t)j + z(t)k, tÎ[a, b] соответствующим непрерывной на отрезке [a, b] вектор-функции r(t) называют непрерывной кривой, или просто кривой, а аргумент t — параметром кривой.
При фиксированном значении t = t0Î [a, b] параметра значения x(t0), y(t0), z(t0) являются координатами точки кривой. Поэтому одна и та же кривая может иметь как векторное так и координатное представление
Заданную таким образом кривую называют годографом вектор-функции r(t), поскольку именно такую кривую описывает в простарнстве конец вектора при изменении параметра t.
Кривую можно также представить как линию пересечения двух поверхностей с уравнениями F1(x, y, z) = 0, F2(x, y, z) = 0. Выбрав за параметр одну из координат, можно через него попытаться выразить из этой системы уравнений остальные координаты. Если это удастся сделать, то можно будет записать
Одной и той же точке кривой могут соответствовать различные значения параметра t. Такие точки кривой называют её кратными точками. Начальной и конечной точками кривой называются точки с радиус-векторами r(a) и r(b) соответственно. Если конечная точка кривой совпадает с её начальной точкой, то кривую называют замкнутой. Замкнутую кривую, не имеющую кратных точек при tÎ(a, b) называют простым замкнутым контуром.
Определение 3. Кривую, лежащую в некоторой плоскости называют плоской.
Если эта плоскость выбрана за координатную плоскость xOy, то координатное представление плоской кривой Г имеет вид:
причём равенство z=0 обычно опускают и пишут
График непрерывной на отрезке [c, d] функции f(x) является плоской кривой с координатным представлением Г = <(x; y) ÎR2 : x = x, y = f(x), xÎ[c, d] >.
В этом случае роль параметра выполняет аргумент x . Плоская кривая является годографом радиус-вектора r(t) = x(t)i + y(t)j или r(x) = xi + f(x)j соответсвенно.
Кривизна плоской кривой.
Длина дуги иеё производная.
В введении были рассмотрены понятия векторной функции, опираясь на которое и было дано строгое определение кривой и её частного случая – плоской кривой. В данном пункте дадим определение длины дуги и найдём её дифференциал.
Пусть дуга кривой M0M (рис. 1) есть график функции y=f(x), определённой на интервале (a ,b). Определим длину дуги кривой.
Возьмём на кривой АВ точки M0, M1, M2, … , Mi-1, Mi…, Mn-1, M.
Соединив взятые точки отрезками, получим ломаную линию M0 M1M2… Mi-1Mi…Mn-1M, вписанную в дугу M0 M. Обозначим длину этой ломаной линии через Pn.
Длиной дуги M0M называется предел (обозначим его через s), к которому стремится длина ломаной при стремлении к нулю наибольшей длин отрезков ломанной Mi-1Mi , если этот предел существует и не зависит от выбора точек ломаной M0 M1M2… Mi-1 Mi…Mn-1M .
Найдём выражение дифференциала дуги.
Пусть имеется на плоскости кривая, заданная уравнением y=f(x). Пусть M0(x0, y0)- некотрая фиксированная точка кривой. Обозначим через s длину дуги M0M (рис.
3). При изменении абсциссы x точки М длина s дуги будет меняться, т. е. s есть функция x. Найдём производную s по x.
Дадим x приращение Dx. Тогда дуга s получит приращение Ds = дл. ÈMM1. Пусть — хорда, стягивающая эту дугу. Для того чтобы найти , поступим следующим образом:
Из DMM1Q находим = (Dx)2 +(Dy)2. Умножим и разделим левую часть наDs2:
Разделим все члены равенства на Dx2:
Найдём предел левой и правой частей при Dx®0. Учитывая, что и , получим
Для дифференциала дуги получим следующее выражение:
или
Мы получили выражение дифференциала дуги для того случая, когда кривая задана уравнением y=f(x). Но эта же формула сохраняется и в том случае, когда кривая задана параметрически:
и выражение принимает вид: .
Первая производная функции даёт нам простейшую характеристику линии y=f(x), а именно её направление. Вторая производная тесно связана с другой количественной характеристикой этой линии, с так называемой кривизной, устанавливающей меру изогнутости или искривлённости линии.
Пусть мы имеем кривую, которая не пересекает сама себя и имеет определённую касательную в каждой точке. Проведём касательные к кривой в каких-нибудь двух её точках А и В и обозначим через a угол, образованный этими касательными, или – точнее — угол поворота касательной при переходе от точки А к точке В (рис. 4). Этот угол называется углом смежности. Угол смежности в некоторой степени даёт представление о степени изогнутости дуги. У двух дуг, имеющих одинаковую длину, больше изогнута та, у которой угол смежности больше (рис. 5,4).
рис. 4 рис. 5
Полной характеристикой изогнутости кривой будет отношение угла смежности к длине соответствующей дуги.
Определение 4. Средней кривизной Кср дуги ÈАВ называется отношение соответствующего угла смежности a к длине дуги:
Для одной и той же кривой средняя кривизна её различных частей (дуг) может быть различной; так, например, для кривой (см. рис. 6) средняя кривизна дуги АВ не равна средней кривизне дуги А1В1 , хотя длины этих дуг равны между собой.
Отметим, что вблизи различных точек кривая искривлена по-разному. Для того чтобы охарактеризовать степень искривлённости данной линии в непосредственной близости к данной точке А, введём понятие кривизны в данной точке.
Определение5. Кривизной Ка линии в данной точке А называется предел средней кривизны дуги АВ, когда длина этой дуги стремится к нулю:
Выведем формулу для вычисления кривизны данной линии в любой её точке M(x, y). При этом будем предполагать, что кривая задана в декартовой системе координат уравнением вида y=f(x) и что функция имеет непрерывную вторую производную.
Проведём касательные к кривой в точках M и M1 с абсциссами x и x+Dx и обозначим через j и j+Dj углы наклона этих касательных (рис.7).
Длину дуги ÈM0M отсчитываемую от некоторой постоянной точки M0, обозначим через s; тогда Ds = ÈM0M1 -ÈM0M, а½Ds½ = ÈMM1. Как видно из (рис. 7), угол смежности, соответствующий дуге ÈMM1 равен абсолютной величине разности углов j и j+Dj, то есть равен ½Dj½.
Согласно определению средней кривизны кривой на участке ÈMM1 имеем .
Чтобы получить кривизну в точке М, нужно найти предел полученного выражения при условии, что длина дуги ÈMM1 стремится к нулю:
Так как величины j и s зависят от x, то, следовательно, j можно рассматривать как функцию от s. Можно считать, что эта функция задана параметрически с помощью параметра x. Тогда
Для вычисления воспользуемся формулой дифференцирования функции, заданной параметрически: .
Чтобы выразить производную через функцию y=f(x), заметим, что и, следовательно .
Дифференцируя по x последнее равенство, получаем .
И так как , то
, и окончательно, так как , получаем
.
Следовательно, в любой точке кривой, где существует и непрерывна вторая производная, можно вычислить кривизну по формулам.
Вычисление кривизны линии, заданной параметрически.
Пусть кривая задана параметрически: x=j(t), y=y(t). Тогда
Подставляя полученные выражения в формулу 3, получаем
.
Вычисление кривизны линии, заданной уравнением в полярных координатах.
Пусть кривая задана уравнением вида r = f(q). Запишем формулы перехода от полярных координат к декартовым: x = rcosq, y = rsinq .
Если в эти формулы подставить вместо r его выражение через q, то есть f(q), то получим
x = f(q) cos q, y = f(q) sin q
Последние уравнения можно рассматривать как параметрические уравнения кривой, причём параметром является q.
Тогда,
,
Подставляя последние выражения в формулу, получаем формулу для вычисления кривизны кривой, заданной в полярных координатах:
Радиус и круг кривизны
Определение 7. Величина R, обратная кривизне К линии в данной точке М, называется радиусом кривизны этой линии в рассматриваемой точке: R = 1/K, или
Построим в точке М нормаль к кривой (рис. 8 ), направленную в сторону вогнутости кривой, и отложим на этой нормали отрезок МС, равный радиусу R кривизны кривой в точке М.
Точка С называется центром кривизны данной кривой с центром в точке С (проходящий через точку М) называется кругом кривизны данной кривой в точке М.
Из определения круга кривизны следует, что в данной точке кривизна кривой и кривизна круга кривизны равны между собой. Выведем формулы, определяющие координаты центра кривизны.
Пусть кривая задана уравнением y=f(x). Зафиксируем на кривой точку M(x, y) и определим координаты a и b центра кривизны, соответствующего этой точке (рис. 9).Для этого напишем уравнение нормали к кривой в точке М:
Так как точка C(a, b) лежит на нормали, то её координаты должны удовлетворять уравнению .
Далее, точка C(a, b) находится от точки М на расстоянии, равном радиусу кривизны R:
Решив совместно уравнения * определим a, b:
и так как , то
Чтобы решить вопрос о том, верхние или нижние знаки сле6дует брать в последних формулах, нужно рассмотреть случай y!!>0 и y!! 0 , то в этой точке кривая вогнута и, следовательно, b>y (рис. 9) и поэтому следует брать нижние знаки. Учитывая, что в этом случае ½y!!½= y. формулы координат центра запишем в следующем виде:
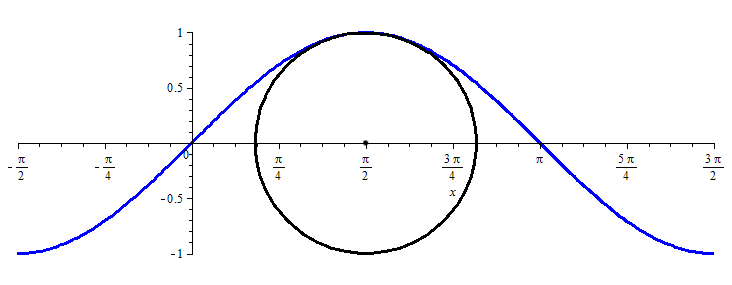
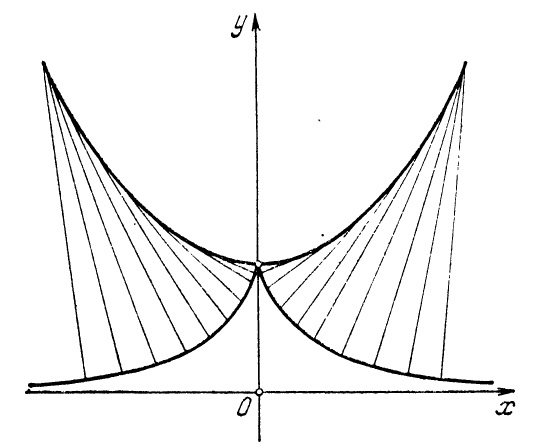
 Рис. 22.9
Рис. 22.9 Длиной дуги M0M называется предел (обозначим его через s), к которому стремится длина ломаной при стремлении к нулю наибольшей длин отрезков ломанной Mi-1Mi , если этот предел существует и не зависит от выбора точек ломаной M0 M1M2… Mi-1 Mi…Mn-1M .
Длиной дуги M0M называется предел (обозначим его через s), к которому стремится длина ломаной при стремлении к нулю наибольшей длин отрезков ломанной Mi-1Mi , если этот предел существует и не зависит от выбора точек ломаной M0 M1M2… Mi-1 Mi…Mn-1M .
 Пусть имеется на плоскости кривая, заданная уравнением y=f(x). Пусть M0(x0, y0)- некотрая фиксированная точка кривой. Обозначим через s длину дуги M0M (рис.
Пусть имеется на плоскости кривая, заданная уравнением y=f(x). Пусть M0(x0, y0)- некотрая фиксированная точка кривой. Обозначим через s длину дуги M0M (рис. 3). При изменении абсциссы x точки М длина s дуги будет меняться, т. е. s есть функция x. Найдём производную s по x.
3). При изменении абсциссы x точки М длина s дуги будет меняться, т. е. s есть функция x. Найдём производную s по x. — хорда, стягивающая эту дугу. Для того чтобы найти
— хорда, стягивающая эту дугу. Для того чтобы найти  , поступим следующим образом:
, поступим следующим образом:

 и
и  , получим
, получим 
 или
или 


 .
. рис. 4
рис. 4  рис. 5
рис. 5
 Для одной и той же кривой средняя кривизна её различных частей (дуг) может быть различной; так, например, для кривой (см. рис. 6) средняя кривизна дуги АВ не равна средней кривизне дуги А1В1 , хотя длины этих дуг равны между собой.
Для одной и той же кривой средняя кривизна её различных частей (дуг) может быть различной; так, например, для кривой (см. рис. 6) средняя кривизна дуги АВ не равна средней кривизне дуги А1В1 , хотя длины этих дуг равны между собой.

 Проведём касательные к кривой в точках M и M1 с абсциссами x и x+Dx и обозначим через j и j+Dj углы наклона этих касательных (рис.7).
Проведём касательные к кривой в точках M и M1 с абсциссами x и x+Dx и обозначим через j и j+Dj углы наклона этих касательных (рис.7).
 .
.


 воспользуемся формулой дифференцирования функции, заданной параметрически:
воспользуемся формулой дифференцирования функции, заданной параметрически:  .
. через функцию y=f(x), заметим, что
через функцию y=f(x), заметим, что  и, следовательно
и, следовательно  .
. .
. , и окончательно, так как
, и окончательно, так как  .
.

 .
. ,
, 
 ,
, 

 Радиус и круг кривизны
Радиус и круг кривизны



 .
.




 , то
, то


 (1)
(1)