iSopromat.ru

Уравнения равновесия (статики) характеризуют неподвижность заданной системы нагруженной комплексом внешних усилий.
При решении задач теоретической механики и сопротивления материалов (например, при определении опорных реакций или внутренних силовых факторов) исходя из условия неподвижности системы или ее частей, записываются уравнения равенства нулю сумм проекций всех сил на оси выбранной системы координат

что следует из условия отсутствия перемещения системы вдоль этих осей, и сумм моментов относительно произвольных точек системы

из условия отсутствия ее вращения относительно указанных осей.
Надо отметить что в случае действия плоской системы сил можно получить только три уравнения статики, а линейная схема нагружения позволяет записать лишь одно уравнение.
Пример составления уравнений равновесия
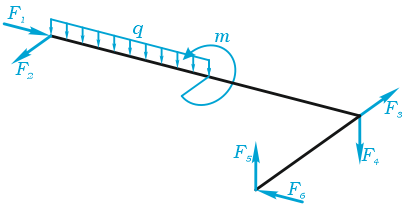
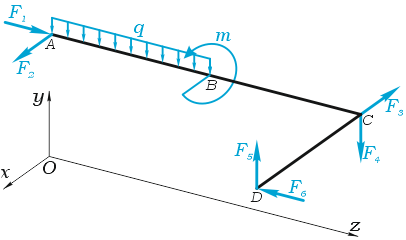
В качестве примера, рассмотрим общий случай пространственного нагружения, где комплекс усилий, включающий сосредоточенные силы F1-F6, равномерно распределенную нагрузку q, и момент m расположенный в плоскости перпендикулярной длинному стержню, удерживает L-образную систему в равновесии.
Обозначим характерные точки системы буквами A, B, C и D, зададим положение трехмерной системы координат xyz и запишем уравнения равновесия.
Суммы проекций сил
Сумма проекций всех сил на ось x (с учетом правила знаков для сил):

здесь при записи силы от распределенной нагрузки ее интенсивность q умножается на ее длину AB.
Суммы моментов
Суммы моментов всех нагрузок, например, относительно точки B (с учетом правила знаков для моментов):
- в плоскости xOy:

- в плоскости xOz:
- в плоскости yOz:



Из полученных шести уравнений можно определить не более шести неизвестных усилий.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
ПроСопромат.ру
Технический портал, посвященный Сопромату и истории его создания
Уравнения равновесия плоской системы сил
Всякая система произвольно расположенных в плоскости сил может быть приведена к главному вектору и главному моменту (см. — здесь).
Для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю.
Главный вектор представляет собой геометрическую сумму всех сил, составляющих систему и перенесенных в центр приведения. Величину главного вектора можно определить через проекции на координатные оси всех сил системы.
Для равновесия необходимо, чтобы главный вектор был равен нулю.
Кроме того, для равновесия необходимо, чтобы главный момент также был равен нулю.
Таким образом, имеем уравнения:
ΣPx = 0 (сумма проекций всех сил на ось X равна 0);
ΣPy = 0 (сумма проекций всех сил на ось Y равна 0);
ΣMo =0 (сумма моментов относительно любой точки равна 0)
Данные уравнения являются уравнениями равновесия тела, находящегося под воздействием системы сил, произвольно расположенных в плоскости.
Условия и уравнения равновесия твердого тела: плоской и пространственной системы сил
Условия равновесия произвольной системы сил
Еще Ньютон говорил, что если геометрическая сумма сил, действующая на тело, равна нулю, то тело:
- либо находится в состоянии покоя;
- либо движется равномерно прямолинейно.
Из теоретической механики известно, что действие нескольких сил, просуммировав, можно заменить равнодействующей силой:
Тогда обязательное условие равновесия можно записать так:
Однако для полного равновесия, часто, этого условия недостаточно, если тело имеет возможность вращаться относительно какой-то точки или оси, то для равновесия такой системы, необходимо, чтобы выполнялось условие:
где M — главные момент системы, который эквивалентен сумме моментов системы относительно некоторого центра.
Условия равновесия плоской системы сил
Выше описанные условия означают, что система будет находится в равновесии, когда все силы, действующие на систему, будут взаимно уравновешиваться и момент относительно любой произвольной точки будет равен нулю, отсюда вытекает первая и основная форма условий равновесия для плоской системы сил:
Вторая форма условий равновесия записывается следующим образом:
Важно! Ось не должна быть перпендикулярна прямой AB.
И, наконец, третья форма условий равновесия выглядит так:
Из данной системы уравнений следует, что для равновесия системы достаточно равенства нулю суммы моментов относительно трех точек.
Важно! Точки, относительно которых записываются уравнения не должны лежать на одной прямой.
Уравнения равновесия для плоской системы сил
Рассмотрим на примере плоской балки, как записываются уравнения равновесия. Использовать будет классическую (первую) форму условия равновесия:
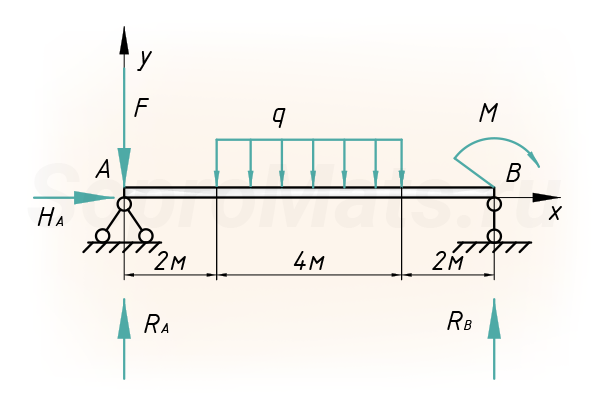
Сумма моментов относительно точки A:
Сумма проекций всех сил на вертикальную ось (y):
Сумма проекций всех сил на горизонтальную ось(x):
Условие равновесия пространственной системы сил
Для пространственной системы сил условие равновесие выглядит вот так:
Таким образом, пространственная система будет находиться в равновесии, если суммы проекций сил на координатные оси, а также суммы моментов относительно осей будут равны нулю.
Уравнения равновесия для пространственной системы сил
В качестве примера рассмотрим пространственную раму, закруженную сосредоточенными силами. Составим для нее шесть уравнений равновесия:
http://prosopromat.ru/texnicheskaya-mexanika/statika/sistema-proizvolno-raspolozhennyx-sil/uravneniya-ravnovesiya-ploskoj-sistemy-sil.html
http://sopromats.ru/sopromat/usloviya-uravneniya-ravnovesiya/