Универсальное уравнение оси изогнутой балки, вычисление прогибов и углов поворота поперечных сечений

Определение прогибов и углов поворота поперечного сечения балки определяют с помощью универсального уравнения изогнутой оси балки (универсального уравнения упругой линии балки)
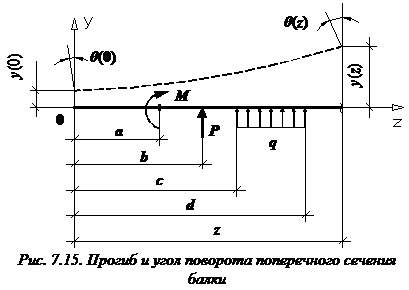
Формула (закон изменения) прогиба балки в сечении с координатой z и угол поворота сечения (рис. 7.15):
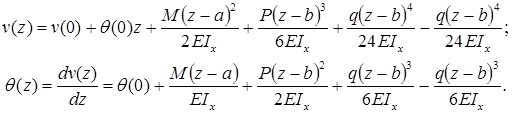
a и b – абсциссы точек приложения сосредоточенного момента M и сосредоточенной силы P, соответственно; c и d – координаты начала и конца участка, нагруженного распределенной нагрузкой.
В формулы входят только внешние усилия, которые расположены левее сечения, в котором определяются перемещения балки.
Если какая-нибудь нагрузка имеет противоположное указанному на рисунке 7.15 направление, то у соответствующих слагаемых в формулах прогибов и углов поворота сечений следует поменять знак на противоположный.
Прогиб  и угол поворота
и угол поворота  балки в начале координат (начальные параметры) определяются из условий закрепления балки.
балки в начале координат (начальные параметры) определяются из условий закрепления балки.
Уравнение упругой линии балки на примере
Определим прогиб балки на консоли при  м, то есть
м, то есть  . Запишем универсальное уравнение упругой линии балки :
. Запишем универсальное уравнение упругой линии балки :
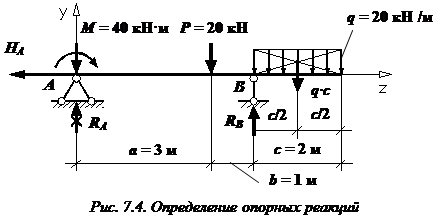
Прогиб балки в начале координат (на левой шарнирной опоре), равен нулю:  .
.
Для определения угла поворота в начале координат необходимо составить дополнительное условие: прогиб на правой опоре равен нулю.
 ,
,
 .
.
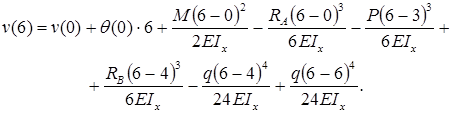
Прогиб консоли при z=6м:
Знак «минус» говорит: прогиб балки на консоли происходит вниз. Число, стоящее в числителе, измеряется в килоньютонах на метр в кубе (кН·м3).
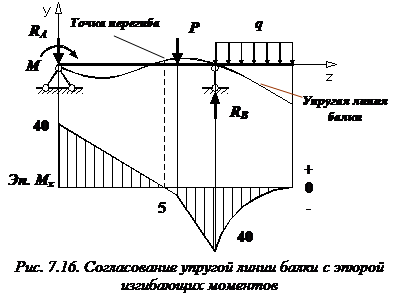
Примерный вид упругой линии балки показан на рис. 7.16.
Упругая линия балки должна быть согласована с эпюрой изгибающих моментов по дифференциальным зависимостям. Точка перегиба находится под сечением балки, в котором изгибающий момент равен нулю, что следует из закона Гука при изгибе.
Дифференциальное уравнение упругой линии балки и его интегрирование
При изгибе ось балки искривляется, а поперечные сечения перемещаются поступательно и поворачиваются вокруг нейтральных осей, оставаясь при этом нормальными к изогнутой продольной оси (рис. 8.22). Деформированная (изогнутая) продольная ось балки называется упругой линией , а поступательные перемещения сечений, равные перемещениям y = y ( x ) их центров тяжести сечений – прогибами балки .

Между прогибами y ( x ) и углами поворота сечений θ ( x ) существует определенная зависимость. Из рис. 8.22 видно, что угол поворота сечения θ равен углу φ наклона касательной к упругой линии ( θ и φ — углы с взаимноперпендикулярными сторонами). Но согласно геометрическому смыслу первой производной y / = tg θ . Следовательно, tg θ = tg φ = y / .
В пределах упругих деформаций прогибы балок обычно значительно меньше высоты сечения h , а углы поворота θ не превышают 0.1 – 0.15 рад. В этом случае связь между прогибами и углами поворота упрощается и принимает вид θ = y / .
Определим теперь форму упругой линии. Влияние перерезывающих сил Q на прогибы балок, как правило, незначительно. Поэтому с достаточной точностью можно принять, что при поперечном изгибе кривизна упругой линии зависит только от величины изгибающего момента M z и жесткости EI z (см. уравнение (8.8)):
 .
.
В то же время в неподвижной системе координат кривизна упругой линии, как и всякой плоской кривой,
 .
.
Приравнивая правые части (8.26) и (8.27) и учитывая, что правила знаков для M z и y // были приняты независимо друг от друга, получаем
 .
.
Это равенство называется дифференциальным уравнением упругой линии . При малых деформациях второе слагаемое в знаменателе мало по сравнению с единицей (при θ = 0.1 рад ( y / ) 2 =0.01 ) и им можно пренебречь. В результате получим приближенное дифференциальное уравнение упругой линии балки
 .
.
Выбор знака в правой части (8.29) определяется направлением координатной оси y , так как от этого направления зависит знак второй производной y // . Если ось направлена вверх, то, как видно из рис. 8.23, знаки y // и M z совпадают, и в правой части надо оставить знак плюс. Если же ось направлена вниз, то знаки y // и M z противоположны, и это заставляет выбрать в правой части знак минус.
Заметим, что уравнение (8.29) справедливо только в пределах применимости закона Гука и лишь в тех случаях, когда плоскость действия изгибающего момента M z содержит одну из главных осей инерции сечения.

Интегрируя (8.29), находим сначала углы поворота сечений
 ,
,
а после второго интегрирования – прогибы балки
 .
.
Постоянные интегрирования определяются из граничных условий. На участках с различными аналитическими выражениями для изгибающих моментов дифференциальные уравнения упругой линии также различны. Интегрирование этих уравнений при n участках дает 2 n произвольных постоянных. Для их определения к граничным условиям на опорах добавляются условия равенства прогибов и углов поворота на стыке двух смежных участков балки.
Универсальное уравнение упругой линии балки
Дифференциальные соотношения
 Рассмотрим рисунок 5.1. Балка постоянного сечения под воздействием внешней нагрузки Р деформируется так, что ее концевая точка C перемещается в положение С1. Нейтральная ось балки, называемая в дальнейшем упругой линией, в точке с координатой z имеет кривизну 1/r, прогиб y, угол наклона q =y¢, вторую производную y².
Рассмотрим рисунок 5.1. Балка постоянного сечения под воздействием внешней нагрузки Р деформируется так, что ее концевая точка C перемещается в положение С1. Нейтральная ось балки, называемая в дальнейшем упругой линией, в точке с координатой z имеет кривизну 1/r, прогиб y, угол наклона q =y¢, вторую производную y².
Перечисленные параметры связаны между собой соотношением, доказываемым в дифференциальной геометрии:  (5.1)
(5.1)
Для малых перемещений величиной y’ 2 по сравнению с 1 можно пренебречь, тогда:  (5.2)
(5.2)
Учитывая (5.2) и (3.7.b) получим:
 (5.3)
(5.3)
С учетом соотношений (4.1) и (4.2) можно получить цепочки дифференциальных соотношений для случая бруса переменного сечения:
 (5.4)
(5.4)
а также для бруса с постоянным сечением:
 (5.5)
(5.5)
В частности, при нагружении бруса постоянного сечения равномерно распределенной нагрузкой q:
 (5.6)
(5.6)
 Следовательно, эпюры в соответствии с дифференциальными соотношениями (5.5), в зависимости от рассматриваемого параметра, будут иметь следующие формы (рис.5.2): q — горизонтальная прямая, Q — наклонная прямая, М — квадратичная парабола, q — кубическая парабола, у – кривая четвертого порядка. Если q=0, но имеется сосредоточенная сила Р, то ось будет изогнута по кривой третьего порядка. Если балка нагружена только изкибающим моментом М, то ось выразится кривой второго порядка.
Следовательно, эпюры в соответствии с дифференциальными соотношениями (5.5), в зависимости от рассматриваемого параметра, будут иметь следующие формы (рис.5.2): q — горизонтальная прямая, Q — наклонная прямая, М — квадратичная парабола, q — кубическая парабола, у – кривая четвертого порядка. Если q=0, но имеется сосредоточенная сила Р, то ось будет изогнута по кривой третьего порядка. Если балка нагружена только изкибающим моментом М, то ось выразится кривой второго порядка.
Наибольшие удлинения и напряжения в брусе вычисляются по формулам, вытекающим из (4.6) и (4.7):
 (5.7)
(5.7)
 (5.8)
(5.8)
Пример 5.1
Определим прогибы балки, изображенной на рис.5.1. Изгибающий момент в сечении z равен: M = P (l — z)
После двукратного интегрирования выражения

Постоянную интегрирования С1 найдем из граничного условия: при z = 0имеем: y¢ = 0. Отсюда С1 = 0, но для общности решения пока оставим этот член в формуле:
 . (5.9)
. (5.9)
Постоянную интегрирования С2 определяем из граничного условия: при z = 0 y = 0. Следовательно, С2= 0, тогда для произвольной точки:

 . (5.10)
. (5.10)
Максимальные угол наклона и прогиб имеют место в точке приложения силы Р.
Таким образом,при z=l имеем:

 (5.11)
(5.11)
Универсальное уравнение упругой линии балки
Из примера 5.1 видно, что для каждого участка балки после интегрирования уравнения появляются две произвольные постоянные (С1,С2 в 5.9). Если балка имеет n участков, то для определения 2n постоянных интегрирования необходимо совместно решить 2n уравнений. Для бруса постоянной жесткости EJx этого можно избежать, если при составлении уравнения упругой линии придерживаться определенных правил.
 Рассмотрим брус (рис.5.3), нагруженный наиболее часто встречающимися силовыми факторами: сосредоточенным моментом Ма, сосредоточенной силой Р и распределенной нагрузкой интенсивности q. Из этих типов силовых факторов могут быть скомбинированы почти все встречающиеся на практике виды нагрузок. За положительные направления сил при движении от левого конца примем те, которые указаны на рисунке, то есть для Р и q — вверх, а для момента Ма — по часовой стрелке. Система указанных силовых факторов должна удовлетворять условиям равновесия.
Рассмотрим брус (рис.5.3), нагруженный наиболее часто встречающимися силовыми факторами: сосредоточенным моментом Ма, сосредоточенной силой Р и распределенной нагрузкой интенсивности q. Из этих типов силовых факторов могут быть скомбинированы почти все встречающиеся на практике виды нагрузок. За положительные направления сил при движении от левого конца примем те, которые указаны на рисунке, то есть для Р и q — вверх, а для момента Ма — по часовой стрелке. Система указанных силовых факторов должна удовлетворять условиям равновесия.
Выявим особенности, вносимые в уравнение упругой линии различными типами внешних силовых факторов. Для этого составим выражения изгибающих моментов для каждого из пяти отмеченных на рисунке участков:

 (5.12)
(5.12)
Видно, что изгибающий момент для каждого последующего участка целиком включает в себя выражение изгибающего момента предыдущего участка и отличается от него добавкой нового слагаемого. При переходе от четвертого участка к пятому указанная закономерность сохранена специально. При этом равномерно распределенная нагрузка четвертого участка продолжена, как это показано пунктиром, на пятый участок, и одновременно на пятом участке приложена отрицательная (компенсирующая) нагрузка интенсивности q.
Проинтегрируем полученные выражения один раз, не раскрывая скобок. Для того чтобы сохранить однотипность полученных выражений, интеграл от Ма напишем в виде Ма(z-a), что скажется только на величине произвольной постоянной Сi. В итоге, с учетом выражения y² = M / EJx получим следующие выражения для угла наклона упругой линии у’ :

 (5.13)
(5.13)


Произвольные постоянные Сi, должны быть подобраны так, чтобы при переходе от одного участка к другому величина у’ не претерпевала разрыв. Следовательно, при z=а у’1=у’2, при z=b у’2=у’3,и так далее.
Так как брус имеет постоянную жесткость, очевидно, что

Угол наклона q0 упругой линии в начале координат определяется из выражения для первого участка:

Интегрируя полученные выражения второй раз найдем:
 (5.14)
(5.14)
Произвольные постоянные Di, должны быть подобраны из условия непрерывности функции у на границах участков. Следовательно, при z=а у1=у2, при z=b у2=у3 и т.д. Так как брус имеет постоянную жесткость, очевидно, что
 ,
,
где у0 – ордината упругой линии в начале координат. Уравнения (5.14) удобно записать в виде одного общего, так называемого универсального уравнения упругой линии балки:  (5.15)
(5.15)
Для определения координат точек упругой линии первого участка следует пользоваться членами уравнения, расположенными слева от вертикальной черты с индексом I. Для второго участка надо брать слагаемые до черты с индексом II, и т.д. Для определения ординат на пятом участке следует производить вычисления, пользуясь полным уравнением 5.15. Преимущество универсального уравнения заключается в том, что оно позволяет составлять уравнение упругой линии, минуя громоздкое определение произвольных постоянных. Независимо от числа участков, необходимо определить только две постоянные: у0 и q0.

Пример 5.2
Написать уравнение упругой линии для консоли с жестко защемленным левым концом и загруженной на среднем участке распределенной нагрузкой q (рис.5.4). Определяем реакцию и момент в заделке: 
 Теперь можно вместо левой заделки рисовать на схеме эквивалентные ей реакции опор. Таким образом, схема сведена к виду, для которого выписано универсальное уравнение. Начало координат помещаем на левом конце балки. Здесь q0 = 0 и y0 = 0.
Теперь можно вместо левой заделки рисовать на схеме эквивалентные ей реакции опор. Таким образом, схема сведена к виду, для которого выписано универсальное уравнение. Начало координат помещаем на левом конце балки. Здесь q0 = 0 и y0 = 0.
Далее, из уравнения (5.15) «набираем» члены уравнения, соответствующие рассматриваемой балке.

В первый участок входят слагаемые силы и момента в заделке. На втором участке к ним добавляется слагаемое распределенной нагрузки. На третьем участке перемещения определяются всеми слагаемыми уравнения. Если раскрыть скобки, то для последнего участка получим:
 .
.
Здесь упругая линия представляет собой прямую, поскольку изгибающий момент равен нулю.
http://mysopromat.ru/uchebnye_kursy/sopromat/izgib/peremescheniya_pri_izgibe/differentsialnoe_uravnenie_uprugoi_linii_balki/
http://allrefrs.ru/3-44905.html