Оптимизация конструктивных параметров летательных аппаратов

Оптимизация конструктивных параметров летательных аппаратов
Дифференциальные уравнения движения летательных аппаратов (ЛА), будем называть математической моделью движения ЛА.
Если за признак классификации взять постоянство массы ЛА в полёте, то можно говорить о математических моделях движения ЛА постоянной и переменной массы.
К основным теоремам, используемым при составлении уравнений движения ЛА, относятся теоремы об изменении количества движения, изменении кинетического момента, изменении кинетической энергии. Распространение перечисленных классических теорем на динамику ракет, принадлежащих к классу тел переменного состава (массы), проводятся на основе так называемого принципа затвердевания, формулируемого следующим образом: уравнение движения тела переменного состава можно представлять в форме уравнений движения тела постоянного состава, имеющую мгновенно зафиксированную (затвердевшую) массу. В число сил, действующих на тело в рассматриваемый конкретный момент, включаются внешние силы, реактивные силы Кориолиса и вариационные силы [1, 2,5].
Характер движения оперенного летательного аппарата (ОЛА) вокруг центра масс существенно зависит от способа стабилизации его в полете. В настоящее время широко применяются два способа стабилизации летательных аппаратов (ЛА): вращением и оперением [2, 3].
К причинам, вызывающим колебания неуправляемых ЛА относительно центра масс, относятся следующие основные баллистические факторы.
1. Эксцентриситет силы тяги (МΔ) относительно центра массы ЛА, создается благодаря тому, что вектор силы тяги не совпадает с центром массы ЛА (рис. 2).
2. Начальные возмущения в момент пуска, к которым относят: первоначальный толчок, состоит в получении ЛА начальной угловой скорости вращения ( ) относительно экваториальной оси; начальный угол (
) относительно экваториальной оси; начальный угол ( ) отклонения продольной оси ЛА от направления вектора скорости в момент пуска.
) отклонения продольной оси ЛА от направления вектора скорости в момент пуска.
3. Аэродинамическая асимметрия ЛА (перекос, деформация и несимметричность формы элементов стабилизатора и т. п.), которая приводит к появлению дополнительных аэродинамических моментов, вызывающих колебания ЛА относительно центра масс (рис. 1).
Следует отметить, что эксцентриситет силы тяги и центра масс, а также аэродинамическая асимметрия прежде всего обусловлены производственными и эксплуатационными причинами.
Для изучения влияния перечисленных факторов на кучность использована система дифференциальных уравнений (СДУ) движения неоперенного летательного аппарата (НЛА) в возмущенной среде.
Получение математических моделей, описывающих состояние ЛА, имеет своей целью, как правило, определение искомых параметров движения: компонентов скорости движения центра масс, угловой скорости ЛА относительно его центра масс, углов, характеризующих ориентацию аппарата, и, наконец, координат центра масс, по которым может быть построена траектория движения ЛА. В качестве независимой переменной (главного аргумента) в математической модели движения ЛА выступает текущее время t. Основу математической модели, характеризующей состояние ЛА, составляют дифференциальные уравнения движения. Для того чтобы получить их решения в конечной форме, должны быть однозначно заданы начальные условия и определены силы, находящиеся в правых частях дифференциальных уравнений. При этом несущественно, в какой форме задаются воздействия (детерминированный или стохастический подход), важно, чтобы принятая модель сил характеризовалась полной информацией об их значениях в рассматриваемом интервале времени. Именно эта полная совокупность сил, определяющая вид входных воздействий, и будет характеризовать при помощи фазовых координат состояние ЛА в данный и последующий моменты времени [1, 5]
Дифференциальные уравнения пространственного движения получены проектированием на оси полускоростной и полусвязанной систем координат (рис 1, 2) [3, 4] общих векторных уравнений, выражающих содержание теорем о производных по времени от векторов количества и момента количества движения:

 (1)
(1)
В качестве составляющих главного вектора действующих сил  были учтены такие силы: сила лобового сопротивления; подъемная сила; сила тяги; сила Кориолиса, возникающая за счет истечения пороховых газов; силы, вызванные эксцентриситетом тяги и центра масс; силы, вызванные вращением Земли.
были учтены такие силы: сила лобового сопротивления; подъемная сила; сила тяги; сила Кориолиса, возникающая за счет истечения пороховых газов; силы, вызванные эксцентриситетом тяги и центра масс; силы, вызванные вращением Земли.
Составляющими главного момента  количества движения учитывались следующие моменты: опрокидывающий (для ОЛА – стабилизирующий) момент; экваториальный демпфирующий момент; момент трения; момент Кориолиса, возникающий за счет истечения пороховых газов; моменты, вызванные эксцентриситетом тяги и масс; моменты, вызванные вращением Земли.
количества движения учитывались следующие моменты: опрокидывающий (для ОЛА – стабилизирующий) момент; экваториальный демпфирующий момент; момент трения; момент Кориолиса, возникающий за счет истечения пороховых газов; моменты, вызванные эксцентриситетом тяги и масс; моменты, вызванные вращением Земли.
Уравнения вращательного движения неоперенного летательного аппарата около его центра масс являются динамическими уравнениями Эйлера, для которых существует наиболее простое представление в проекциях на полусвязанные оси С

 (рис. 2) [3, 4].
(рис. 2) [3, 4].
1. Уравнения движения ЛА при наличии перекоса и смещения с оси симметрии вектора силы тяги
При исследовании этого вопроса будем иметь в виду то, что ЛА все же является телом вращения, причем его ось симметрии одновременно является и осью динамической симметрии. В рассматриваемом случае к ЛА будут приложены следующие дополнительные силы и моменты:
— вследствие смещения и перекоса вектор силы тяги раскладывается на две составляющие, одна из которых параллельна оси симметрии, а вторая – ей перпендикулярна. Вследствие малости угла наклона вектора силы тяги к оси симметрии составляющую, параллельную этой оси, можно принять равной силе тяги;
— вследствие эксцентриситета силы тяги в плоскости сξη (рис.2) возникает отклоняющий реактивный момент МΔ, величина которого равна произведению силы тяги Р на эксцентриситет Δ, стремящийся вращать ЛА относительно центра масс.
Учтем также момент от косо поставленного оперения, который направлен вдоль оси симметрии ЛА и описывается соотношением:
 (2)
(2)
где  – угол наклона оперения, L – длинна ЛА,
– угол наклона оперения, L – длинна ЛА,  – площадь поперечного сечения ЛА,
– площадь поперечного сечения ЛА,  –массовая плотность воздуха, V – скорость ЛА,
–массовая плотность воздуха, V – скорость ЛА,  – аэродинамический коэффициент, А – полярный момент инерции.
– аэродинамический коэффициент, А – полярный момент инерции.
С учетом дополнительных сил и моментов, создаваемых перекосом и смещением с оси симметрии вектора силы тяги, уравнения будут иметь вид [4]:
 (3)
(3)
где  .
.
Рассмотрим, каким же образом влияют конструктивные параметры ЛА на величину характеристик рассеивания по дальности  и по направлению
и по направлению  .
.
Расчет характеристик рассеивания с учетом конструктивных параметров ЛА можно провести по зависимостям [5]:


 (4)
(4)

 .
.
Поправочные коэффициенты по дальности:


 на изменение
на изменение  – угла бросания,
– угла бросания,  – начальной скорости,
– начальной скорости,  – баллистического коэффициента,
– баллистического коэффициента,  ,
,  – углов нутации,
– углов нутации,  ,
,  – угловых скоростей нутации,
– угловых скоростей нутации,  – линейного эксцентриситета силы тяги,
– линейного эксцентриситета силы тяги,  – углового эксцентриситета силы тяги,
– углового эксцентриситета силы тяги,  – угла наклона сопел,
– угла наклона сопел,  ,
,  – линейных эксцентриситетов центра масс,
– линейных эксцентриситетов центра масс,  – угловых эксцентриситетов центра масс,
– угловых эксцентриситетов центра масс,  – угловой скорости собственного вращения ЛА,
– угловой скорости собственного вращения ЛА,  – времени выключения реактивного двигателя, – угла наклона оперения,
– времени выключения реактивного двигателя, – угла наклона оперения,  – диаметра оперения,
– диаметра оперения,  – углов нутации в точке выключения двигателя,
– углов нутации в точке выключения двигателя,  – угловых скоростей нутации в точке выключения двигателя,
– угловых скоростей нутации в точке выключения двигателя,  – времени работы реактивного двигателя,
– времени работы реактивного двигателя,  – дальность полёта ЛА. Коэффициенты, характеризующие разброс соответствующего параметра (фактора):
– дальность полёта ЛА. Коэффициенты, характеризующие разброс соответствующего параметра (фактора):  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , ,
, ,  ,
,  ,
,  , ,
, ,  ,
,  ,
,  ,
,  . Поправочные коэффициенты по дальности рассчитаны с помощью СДУ(7).
. Поправочные коэффициенты по дальности рассчитаны с помощью СДУ(7).
Проведенные расчеты с помощью зависимостей (4, 8) показали, что для получения оптимальных характеристик рассеивания по дальности и по направлению , а также для обеспечения устойчивого полета ОЛА, эксцентриситет силы тяги не должен превышать ∆  мм, угловой аэродинамический эксцентриситет
мм, угловой аэродинамический эксцентриситет  (рис. 4, 7).
(рис. 4, 7).
2. Влияние асимметрии масс на полет летательных аппаратов
Рассмотрим случай, когда центр масс не лежит на геометрической оси симметрии ЛА, которая, в свою очередь, уже не является главной центральной осью инерции. Будем считать, что вектор силы тяги лежит на геометрической оси симметрии, а центр масс смещен с нее на некоторую величину ε (рис. 1). Данное смещение называется эксцентриситетом силы тяжести. Все оси координат связываем с центром инерции, а положение главных центральных осей Сξ1,η1, 1 относительно связанных осей
1 относительно связанных осей  определяем с помощью малых углов γ1 и γ2 (рис. 2).
определяем с помощью малых углов γ1 и γ2 (рис. 2).
Учитывая изложенное выше и данные работы [5] получим уравнения вращательного движения с учётом асиметрии центра масс в следующем виде:

Система уравнений (5) отличается от системы (3) наличием в правой части колеблющихся слагаемых, обусловленных асимметрией масс. Заметим также, что в результате асимметрии в правой части первого уравнения системы (5) появляется почти постоянный подкручивающий момент, обусловленный силой тяги  , поэтому даже невращающийся ОЛА при наличии асимметрии получает с течением времени угловую скорость собственного вращения.
, поэтому даже невращающийся ОЛА при наличии асимметрии получает с течением времени угловую скорость собственного вращения.
При наличии разного рода асимметрии, особенно если система попадает в «резонансный» режим, существенно изменяется правая часть уравнения, описывающего изменения скорости полета. Последнее означает, что движение ОЛА будет происходить не по расчетной траектории, и в результате кучность ухудшится.
Расчеты, проведенные по зависимостям (4), (8) для ЛА: «Град», «Ураган» для различных дальностей полёта и различных тормозных колец (без тормозного кольца, с большим тормозным кольцом и малым тормозным кольцом), показали, что для получения оптимальных характеристик рассеивания линейный эксцентриситет центра масс не должен превышать  ; угловой
; угловой  (рис 5, 8).
(рис 5, 8).
3. Влияние силы и момента Кориолиса за счет истечения газов из сопла
Сила и момент Кориолиса возникают в результате движения пороховых газов по камере и соплу (при наличии угловой скорости вращения ЛА, которую обозначим Ω) (рис. 3).
Элементарная сила Кориолиса  определится по зависимости:
определится по зависимости:
 (6)
(6)
где dm = ρ∙σ; ρ – плотность газов, σ – свободная от пороха площадь сечения, U – относительная скорость истечения газов.
С учётом размеров пороховой шашки получим силу  и момент Кориолиса
и момент Кориолиса  за счёт истечения газов [4]:
за счёт истечения газов [4]:


где  ,
,  ;
;  массовый расход газов через сопло;
массовый расход газов через сопло;  эффективная скорость истечения газов;
эффективная скорость истечения газов;  – расстояния, указанные на рис. 3.
– расстояния, указанные на рис. 3.
Сравнительная оценка показала, что влияние силы Кориолиса невелико и ею можно пренебречь, а момент силы Кориолиса можно сравнить с экваториальным демпфирующим моментом и его необходимо учитывать [4].
Учитывая уравнения 3, 5, 6 и данные работы [4], система дифференциальных уравнений пространственного движения НЛА будет иметь вид:
1. 
2. 
3. 
4. 

5.
6. 
7. 
8. 
9. 
10. 
11. 
12. 
13. 

































В данной СДУ описано движение тела (ЛА) переменной массы в которых учтены: силы лобового сопротивления, подъемная сила, сила тяги, сила Кориолиса за счёт истечения пороховых газов, силы, вызванные эксцентриситетом тяги и центра масс, силы, вызванные вращением Земли, опрокидывающий (для ОЛА – стабилизирующий) момент, экваториальный демпфирующий момент, момент трения, момент Кориолиса за счёт истечения пороховых газов, моменты, вызванные эксцентриситетом тяги и центра масс, моменты, вызванные вращением Земли. Все применяемые обозначения введены в работах [2, 3, 5]
Система дифференциальных уравнений была решена при помощи численного интегрирования методом Рунге-Кутта четвертого порядка.
 |
Экспериментальные характеристики рассеивания  ,
,  взяты по данным работ [6, 7].
взяты по данным работ [6, 7].
4. Пути улучшения кучности оперенных летательных аппаратов
Проведенные расчеты показывают, что на угловое отклонение (рассеивание) траектории неуправляемых оперенных летательных аппаратов (ОЛА), которое характеризуется углом ψk отклонения вектора скорости в конце активного участка траектории, доминирующее влияние оказывает эксцентриситет силы тяги.
Из результатов видно, что сравнительно медленное вращение оперенных неуправляемых ОЛА вокруг продольной оси приводят к резкому уменьшению влияния эксцентриситета силы тяги и асимметрии центра масс.
Расчеты, проведенные с помощью зависимостей (4) и СДУ (8) показали, что вследствие вращения рассеивание оперенных неуправляемых ЛА по направлению уменьшается в 2–2,5 раза, по дальности – в 1–1,5 раза (рис. 6,9). Таким образом, вращение оперенных неуправляемых ЛА является эффективным средством уменьшения рассеивания и значительно улучшает кучность. Для каждого оперенного неуправляемого ЛА существует некоторая оптимальная угловая скорость вращения r0, при которой рассеивание ЛА принимает оптимальное значения. Проведенные расчеты показали, что оптимальная скорость вращения при сходе с направляющей и в полете которое будет обеспечивать минимальное техническое рассеивание, составляет: для ОЛА: М21ОФ «Град» r0=20,9 рад/с; для 9М55Ф «Смерч», r0=25,1 рад/с; для 9М27Ф «Ураган» r0=22,5 рад/с (рис. 6,9).
Угол наклона оперения для обеспечения оптимальной скорости вращения r0 и устойчивого полета ЛА должен составлять для ОЛА: М21ОФ «Град» αoper=0,049 рад, для 9М27Ф «Ураган» αoper=0,054 рад, для 9М55Ф «Смерч» αoper≤0,087 рад (рис 6.9)
Вращение оперенных направляемых ЛА можно получить одним из сделующих трех способов:
1. за счет реактивного момента, создаваемого наклоном сопел ;
2. за счет придания вращательного движения в момент старта за счет винтовых направляющих;
3. за счет косопоставленного оперения.
1. Выбранная в качестве объекта исследования совокупность типов неуправляемых ЛА позволяет всесторонне изучить особенности динамики их полета и разработать рекомендации по баллистической подготовке как существующих, так и перспективных ЛА.
2. Принятая в работе математическая модель динамики полета ЛА позволяет наиболее полно исследовать особенности баллистики ЛА и определить направления её совершенствования.
3. С целью повышения достоверности результатов исследования особенностей динамики полета ЛА по современной методике, учитывающей как волновое сопротивление, так и сопротивление трения, определены коэффициенты аэродинамических сил и моментов, действующих на ЛА в полете, а также рассчитаны их инерционно-массовые характеристики [4].
4. Вопросы влияния линейного и аэродинамического эксцентриситета силы тяги и асимметрии центра масс, рассмотренные в статье, а также начальные возмущения при сходе ЛА с направляющей и в точке выключения двигателя [4] являются определяющими при расчете оптимальных характеристик рассеивания ЛА.
5. Предложенная система дифференциальных уравнений (7) позволяет выбрать оптимальные конструктивные параметры неуправляемых ЛА, обеспечивающие максимальную дальность полета и минимальное техническое рассеивание.
6. Разработанная программа решения системы дифференциальных уравнений позволяет:
а) проводить вычисления значений параметров движения ЛА с заданным по времени шагом, а также их отклонения относительно невозмущенного движения как в пределах полной траектории, так и по участкам: активном участке траектории, пассивном участке траектории;
б) исследовать поведение ЛА под действием любой совокупности возмущений;
в) производить вычисления по возмущениям, заданным как в конечном виде, так и различными законами распределения.
7. Предложенная математическая модель (4, 7) может быть использована при разработке перспективных летательных аппаратов с различными способами стабилизации.
Часть результатов, представленных в данной работе, была получена при поддержке президента Украины в рамках гранта Государственного фонда фундаментальных исследований.
1. Джамая механіка. – К.: Видавництво «Дрохва», 2004. – 415с.
2. , Лысенко баллистика. – М.: Издательство «Машиностроение», 2005. – 607 с.
3. , и др. Баллистика ствольных систем. Справочная библиотека разработчика-исследователя. – М.: Издательство «Машиностроение», 2006. – 461 с.
4. и др. Математическая модель пространственного движения ЛА на твердом топливе в атмосфере. Вестник СумГУ №2, 2008, с 1-6.
5. О движении тела, содержащего подвижную внутреннюю массу // Доклады АН. 2005, т. 405.
6. Таблицы полета М21ОФ ТС, – 74. М.: – 1975г. – 96с.
7. Таблицы полета 9М27Ф ТС, – 84РГ. М.: – 1988г. – 272с.
8. Черноусько и оптимизация движения тела, управляемого посредством подвижной внутренней массы // Прикладная математика и механика. 2006, т. 70, вып. 6. С. 915-941.
МАКЕЕВ Василий Ильич, кандидат технических наук, доцент, доцент кафедры военной подготовки Сумского государственного университета.
, доктор технических, профессор, старший научный сотрудник Института проблем машиностроения им. Подгорного НАН Украины.
Адрес: г. Харьков, ул.
БОНДАРЬ Александр Вячеславович кандидат технических наук, доцент кафедры компьютерных наук Сумского государственного университета.
Адрес: 40000, /5, кв. 16
ТРОФИМЕНКО Павел Евгеньевич, кандидат военных наук, профессор, профессор кафедры военной подготовки Сумского государственного университета.


Рис. 1 – Положение центра масс при асимметрии.
С0 – несмещённое положение центра масс ЛА; С – смещённое положение центра масс ЛА; ε1, ε – линейное значение эксцентриситета центра масс.


 1
1
 |
 |
 |
Рис. 2 – Положение новых главных центральных осей инерции ЛА при наличии эксцентриситетов центра его масс.
 |
Рис. 3 – Параметры истечения пороховых газов через сопло. Се – центр выходного сечения сопла;
С – центр тяжести.
 |
Рисунок 4 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, и эксцентриситета силы тяги для ЛА «Град» М21ОФ (без тормозного кольца)
 |
Рисунок 5 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, и эксцентриситета центра масс для ЛА «Град» М21ОФ
(с малым тормозным кольцом)
 |
Рисунок 6 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, угловой скорости вращения ЛА и угла наклона оперения для ЛА «Град» М21ОФ
(с большим тормозным кольцом)

Рисунок 7 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, и эксцентриситета силы тяги для ЛА «Ураган» 9М27Ф (без тормозного кольца)
 |
Рисунок 8 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, и эксцентриситета центра масс для ЛА «Ураган» 9М27Ф
(с малым тормозным кольцом)

Рисунок 9 – Зависимость характеристик рассеивания ВD, Вb, BD opt,
Bb opt от дальности полёта, угловой скорости вращения ЛА и угла наклона оперения для ЛА «Ураган» 9М27Ф
ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ САМОЛЕТА
В случае анализа динамики самолета, совершающего полет со скоростью, значительно меньшей орбитальной, уравнения движения по сравнению с общшм случаем полета летательного аппарата [13] могут быть упрощены, в частности, можно пренебречь вращением и сферичностью Земли. Кроме этого сделаем еще ряд упрощающих допущений.
Будем считать, что самолет представляет собой абсолютно жесткое тело. Влияние упругости конструкции будем учитывать
только квазистатически, для текущего значения скоростного напора.
Будем считать, что масса и моменты инерции самолета на рассматриваемых интервалах времени неизменны и соответствуют исходному состоянию равновесного полета.
Будем считать, что конфигурация самолета имеет плоскость симметрии и что массы распределены симметрично по отношению к этой плоскости.
При анализе устойчивости и управляемости самолета будем использовать следующие прямоугольные правые системы осей координат.
Нормальная земная система координат OXgYgZg. Эта система осей координат имеет неизменную ориентацию относительно Земли. Начало координат совпадает с центром масс (ЦМ) самолета. Оси 0Xg и 0Zg лежат в горизонтальной плоскости. Их ориентация может быть принята произвольно, в зависимости от целей решаемой задачи. При решении навигационных задач ось 0Xg часто направляют к Северу параллельно касательной к меридиану, а ось 0Zg направляют на Восток. Для анализа устойчивости и управляемости самолета удобно принять направление ориентации оси 0Xg совпадающим по направлению с проекцией вектора скорости на горизонтальную плоскость в начальный момент времени исследования движения. Во всех случаях ось 0Yg направлена вверх по местной вертикали, а ось 0Zg лежит в горизонтальной плоскости и образует вместе с осями OXg и 0Yg правую систему осей координат (рис. 1.1). Плоскость XgOYg называют местной вертикальной плоскостью.
Связанная система координат OXYZ. Начало координат расположено в центре масс самолета. Ось ОХ лежит в плоскости симметрии и направлена вдоль линии хорд крыла (либо параллельно какому-либо другому, фиксированному относительно самолета направлению) к носовой части самолета. Ось 0Y лежит в плоскости симметрии самолета и направлена вверх (при горизонтальном полете), ось 0Z дополняет систему до правой.
Углом атаки а называется угол между продольной осью самолета и проекцией воздушной скорости на плоскость OXY. Угол положителен, если проекция воздушной скорости самолета на ось 0Y отрицательна.
Углом скольжения р называется угол между воздушной скоростью самолета и плоскостью OXY связанной системы координат. Угол положителен, если проекция воздушной скорости на поперечную ось положительна.
Положение связанной системы осей координат OXYZ относительно нормальной земной системы координат OXeYgZg может быть полностью определено тремя углами: ф, #, у, называемыми углами. Эйлера. Последовательно поворачивая связанную систему
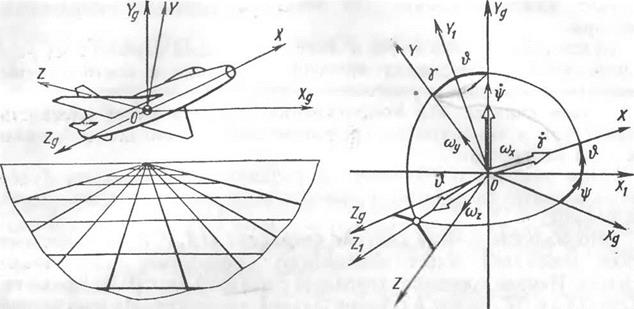
Рис. 1.L Нормальная земная OXgYgZg и связанная OXYZ системы координат Рис, 1.2, Углы Эйлера, используемые при исследовании динамики самолетов
координат на каждый из углов Эйлера, можно прийти к любому угловому положению связанной системы относительно осей нормальной системы координат.
При исследовании динамики самолетов используются следующие понятия углов Эйлера.
Угол рыскания г]) — угол между некоторым исходным направлением (например, осью 0Xg нормальной системы координат) и проекцией связанной оси самолета на горизонтальную плоскость. Угол положителен, если ось ОХ совмещается с проекцией продольной оси на горизонтальную плоскость поворотом вокруг оси OYg по часовой стрелке.
Угол тангажа # — угол между продольно# осью самолета ОХ и местной горизонтальной плоскостью OXgZg, Угол положителен, если продольная ось находится выше горизонта.
Угол крена у — угол между местной вертикальной плоскостью, проходящей через ось ОХ у и связанной осью 0Y самолета. Угол положителен, если ось О К самолета совмещается с местной вертикальной плоскостью поворотом вокруг оси ОХ по часовой стрелке. Углы Эйлера могут быть получены последовательными поворотами связанных осей относительно нормальных осей. Будем считать, что нормальная и связанная системы координат в начале совмещены. Первый поворот системы связанных осей произведем относительно оси О на угол рыскания г]; (ф совпадает с осью OYgXрис. 1.2)); второй поворот —относительно оси 0ZX на угол Ф (‘& совпадает с осью OZJ и, наконец, третий поворот произведем относительно оси ОХ на угол у (у совпадает с осью ОХ). Проектируя векторы ф, Ф, у, являющиеся составляющими
вектора угловой скорости движения самолета относительно нормальной системы координат, на связанные оси, получим уравнения связи между углами Эйлера и угловыми скоростями вращения связанных осей:
со2 = ф cos у — ф cos Ф sin у.
При выводе уравнений движения центра масс самолета необходимо рассматривать векторное уравнение изменения количества движения
где ю — вектор скорости вращения связанных с самолетом осей;
R — главный вектор внешних сил, в общем случае аэродинами-
ческих сил и тяги; G — вектор гравитационных сил.
Из уравнения (1.2) получим систему уравнений движения ЦМ самолета в проекциях на связанные оси:
°ixVz) = Ry + G!!’ (1 -3)
т iy’dt “Ь У — = Rz + Gz>
где Vx, Vy, Vz — проекции скорости V; Rx, Rz — проекции
результирующих сил (аэродинамических сил и тяги); Gxi Gyy Gz — проекции силы тяжести на связанные оси.
Проекции силы тяжести на связанные оси определяются с использованием направляющих косинусов (табл. 1.1) и имеют вид:
Gy = — G cos ft cos у; (1.4)
GZ = G cos d sin y.
При полете в атмосфере, неподвижной относительно Земли, проекции скорости полета связаны с углами атаки и скольжения и величиной скорости (V) соотношениями
Vх = V cos a cos р;
 Vу = — V sin a cos р;
Vу = — V sin a cos р;
2. Аэродинамические силы
Главная > Урок
| Информация о документе | |
| Дата добавления: | |
| Размер: | |
| Доступные форматы для скачивания: |

С ПЕРВОНАЧАЛЬНОЙ ЛЕТНОЙ ПОДГОТОВКОЙ
имени М.М. Расковой
г. Тамбова
На правах рукописи
АЭРОДИНАМИКА И ДИНАМИКА ПОЛЕТА
(Учебное пособие для воспитанников общеобразовательной
школы-интерната с первоначальной летной подготовкой)
Тема 1. Основные свойства воздуха
Тема 2. Аэродинамические силы
Тема 3. Силовая установка самолета
Тема 4. Горизонтальный полет самолета
Тема 5. Подъем самолета
Тема 6. Планирование самолета
Тема 7. Взлет самолета
Тема 8. Посадка самолета
Тема 9. Устойчивость и управляемость самолета
Тема 11. Фигуры простого пилотажа
Тема 12. Фигуры сложного пилотажа Урок1 …..…………………………………………………………… 32
Тема 13. Дальность и продолжительность полета
Тема № 1. Основные свойства воздуха
Аэродинамика – это наука о законах движения воздуха и силовом взаимодействии между воздушным потоком и находящимся в нем телами. Аэродинамика самолета во многом определяет его маневренность и летно-технические характеристики.
Динамика полета – это наука о законах движения летательных аппаратов под действием приложенных к ним сил.
В пособии рассматривается, главным образом, практическая аэродинамика самолета Як-52, то есть вопросы аэродинамики, динамики полета и пилотирования этого самолета.
Основные свойства воздуха.
Рассматривая воздух как термодинамическую систему, состояние его можно характеризовать следующими параметрами: давлением, плотностью и температурой. Для единицы массы газа эти параметры связаны между собой уравнением
 , где R в = 288,14 дж/кг К — газовая постоянная воздуха.
, где R в = 288,14 дж/кг К — газовая постоянная воздуха.
Взаимодействие воздушного потока с твердым телом рассматривается не как процесс бомбардировки поверхности тела множеством молекул, а как обтекание тела непрерывной средой (гипотеза сплошности), имеющей определенные механические свойства – инертность, вязкость и сжимаемость. Эти свойства воздуха зависят от его термодинамического состояния и, следовательно, от параметров состояния.
Применение гипотезы сплошности позволяет ввести понятие воздушной частицы, под которой подразумевается не молекула, а предельно малая воздушная масса dm , занимающая объем dv = dm / .
Воздушная частица, как и любое материальное тело, подчиняется законам Ньютона.
Под инертностью воздуха понимается стремление воздушных частиц, обладающих определенной массой, при отсутствии внешних сил сохранять состояние покоя или равномерного прямолинейного движения (первый закон Ньютона). Для изменения скорости движения воздушной частицы к ней необходимо приложить силу (второй закон Ньютона):
Вязкостью называется способность воздуха сопротивляться сдвигу одних слоев относительно других. Вязкость обуславливается тем, что в процессе хаотического теплового движения молекулы переходят из слоя в слой и переносят с собой определенной количество движения. В результате на медленно движущийся слой воздуха действует ускоряющая сила трения, а на движущийся более быстро – замедляющая.



Результатом вязкости воздуха является появление силы трения, действующей на поверхность самолета.
Сжимаемостью называется свойс
При увеличении давления (сжатии воздуха) уменьшаются межмолекулярные промежутки, что ведет к возрастанию плотности воздуха. Количественной характеристикой сжимаемости является производная
 .
.
Кроме сжимаемости, воздух обладает обратным свойством – упругостью, т.е. способностью сопротивляться деформациям сжатия. Количественной характеристикой упругости воздуха является величина, обратная сжимаемости dp / d [м 2 /с 2 ].
Скорость звука и скачки уплотнения.
Благодаря упругости воздуха в нем могут распространяться звуковые волны. Скорость их распространения в среде называется скоростью звука. Скорость звука прямо пропорциональна упругости среды:
 = 20,1
= 20,1 .
.
В аэродинамике в качестве критерия сжимаемости движущегося воздуха используется отношение скорости движения воздуха (полета) и скорости распространения звука – число М=V/a. Считается, что при малых числах М (М 0,3-0,4) воздух считается практически несжимаемым и его плотность остается постоянной при изменении давления.
0,3-0,4) воздух считается практически несжимаемым и его плотность остается постоянной при изменении давления.
П ри больших скоростях полета торможение воздуха самолетом приводит к большим изменениям параметров воздуха: его давление, плотность и температура могут значительно повышаться. В зоне торможения воздуха возникает «большое возмущение», сравнимое по изменению параметров среды со взрывом боеприпаса.
ри больших скоростях полета торможение воздуха самолетом приводит к большим изменениям параметров воздуха: его давление, плотность и температура могут значительно повышаться. В зоне торможения воздуха возникает «большое возмущение», сравнимое по изменению параметров среды со взрывом боеприпаса.
Ф
ронт ударной волны, распространение которого остановлено набегающим воздушным потоком, называется скачком уплотнения. Физически скачек уплотнения представляет собой тонкий уплотненный слой воздуха, на котором скачком изменяются параметры потока.
Задачи на закрепление материала.
1. Определить плотность воздуха, если температура равна 15 0 С, а давление равно 760 мм ртутного столба.
= 0,047*760/(273+15) = 0.124 кг с 2 /м 4 .
Определить скорость звука при температуре воздуха 15 0 С
A = 20.1 (273+15) = 341 м/с
= 20.1 (273+15) = 341 м/с
Основные законы движения газов.
Воздушным потоком называется направленное движение массы воздуха (газа). Характеристиками воздушного потока в каждой точке являются параметры состояния воздуха ( p, ,T) и скорость движения его частиц ( V).
Воздушный поток, в каждой точке которого с течением времени параметры остаются постоянными, называется установившимся (стационарным).
Линией тока называется линия, в каждой точке которой касательная к ней совпадает с направлением вектора скорости движения частиц в данный момент времени. В стационарных потоках линии тока и траектории движения частиц совпадают.
Поверхность, образованная линиями тока, проходящими через точки замкнутого контура, называется трубкой тока, а заключенный в ней объем – струйкой тока.

Так как поверхность трубки тока образована линиями тока, то она является непроницаемой для воздуха (нет нормальных составляющих скорости движения частиц).
Сама струйка тока по определению является неразрывной. Это ее свойство часто трактуют как закон неразрывности струи.
Аэродинамика, как и всякая наука, базируется на фундаментальных законах материального мира: сохранения массы и энергии.
а) Уравнение постоянства расхода
Выражает закон сохранения массы применительно к воздушному потоку.
При установившихся течениях массовый секундный расход воздуха через любое сечение струйки тока есть величина постоянная.
m сек = m/t=  = const,
= const,
где: t – время прохождения массы воздуха m через сечение струйки с площадью f .
Если воздух считать несжимаемым, то его плотность будет постоянной в любом сечении струйки и тогда Vf = const .
При установившихся течениях несжимаемого воздуха его объемный секундный расход через любое сечение струйки постоянен.
При этом V 1 f 1 = V 2 f 2 и V 1 / V 2 = f 2 / f 1 .
б) Уравнение Бернулли для несжимаемого газа.
Выражает закон сохранения энергии для установившегося течения несжимаемого газа.
При установившихся адиабатических течениях несжимаемого воздуха сумма статического и динамического давлений есть величина постоянная в любом сечении струйки тока.
 .
.
Из уравнения Бернулли следует, что при установившихся адиабатических течениях несжимаемого воздуха в тех сечениях струйки тока, где скорость течения возрастает, статическое давление уменьшается.
Аэродинамические трубы. Типы труб и принципы их работы.
На рисунке представлен фрагмент аэродинамической трубы с открытой рабочей частью. Стрелками обозначен создаваемый поток воздуха.
А
эродинамические трубы являются устройствами для создания равномерного воздушного потока в ограниченном пространстве. В дозвуковых трубах для создания направленного движения воздуха обычно используется воздушные винты и устройства спрямляюшие поток. Трубы бывают замкнутого и разомкнутого типа, с открытой и закрытой рабочей частью.
Для создания сверхзвуковых потоков обычно используются устройства предварительного накопления запаса воздуха, который разгоняется до сверхзвуковых скоростей с использованием сопла Ловаля.
Задачи на закрепление материала.
Определить скорость и давление в сечении струйки тока несжимаемого воздуха, если известно, что в контрольном сечении скорость воздуха 20 м/с, плотность 1,225 кг/м 3 , давление 101325 Па, площадь контрольного сечения в два раза больше расчетного.
V= V 1 *2 = 40 м/с. p = p 1 + V 1 2 / 2 — V 2 / 2 = 101325 + 1,225*20 2 / 2 – 1,225* 40 2 / 2 = 100590 Па.
Тема № 2. Аэродинамические силы
Обтекание тел воздушным потоком и возникновение аэродинамических сил.
При этом появляются распределенные по поверхности силы давления, действующие на тело.
Кроме сил давления на тело действуют силы трения, возникающие из-за вязкости воздуха.
Результирующая распределенных по поверхности тела нормальных сил давления и касательных сил трения называется полной аэродинамической силой R .
ело, помещенное в воздушный поток, деформирует струйки тока.
Крыло и его назначение. Основные геометрические характеристики крыла.
Крыло предназначено для создания подъемной силы и характеризуется следующими геометрическими параметрами (цифры указывают параметры крыла самолета Як-52):
р азмах l = 9,5 м;
азмах l = 9,5 м;
площадь S = 15 м 2 ;
длина САХ b a = 1,64 м; b 0 — b k
удлинение крыла = l 2 / S = 6,01;
сужение крыла = b 0 / b к = 1,98.
У самолета Як-52 крыло имеет трапециевидную форму. Концы крыла приподняты и составляют поперечное V врыла равное 2 0 . __ Крыло набрано из несимметричных плосковыпуклых профилей с относительной толщиной у конца крыла 9% и у корня крыла – 14%.
b  . 100 [%]- относительная толщина
. 100 [%]- относительная толщина
Основные сведения об углах атаки и скольжения.
Для крыла или профиля угол атаки – это угол между направлением вектора скорости невозмущенного набегающего потока и хордой крыла. Для самолета – вместо хорды крыла берется продольная ось.
Угол скольжения – это угол между плоскостью симметрии самолета и направлением вектора скорости невозмущенного набегающего потока.


4. Возникновение подъемной силы и силы лобового сопротивления крыла.
П

ри обтекании крыла, имеющего положительный угол атаки, за счет деформаций струек тока, давление на нижней его поверхности оказывается выше, чем на верхней. (Стрелками на рисунке показана разность давлений в точке на поверхности крыла и атмосферного). При этом появляется результирующая аэродинамическая сила R , которая может быть разделена на две составляющие: подъемную силу Y (перпендикулярную вектору скорости) и силу лобового сопротивления Х (параллельную вектору скорости) .
Распределение давления по профилю крыла обычно оказывается таким, что на передней четверти крыла создается примерно половина подъемной силы.
Аэродинамические характеристики самолета .
Аэродинамические характеристики — это зависимости коэффициентов аэродинамических сил от критериев подобия.
с у =  , с х =
, с х =  .
.
Для дозвуковых самолетов основным критерием подобия считается угол атаки.
а) Зависимость коэффициента подъемной силы от угла атаки (с у ())
с  у мах
у мах



 Для Як-52 0 = — 1 0 ; с у = 0,084 1/ град.
Для Як-52 0 = — 1 0 ; с у = 0,084 1/ град.
кр. = 18 0 , с у мах = 1,56.
Отклонение щитков увеличивает значение с у .
 .
.
б) Поляра самолета – это зависимость коэффициента силы лобового сопротивления от коэффициента подъемной силы.
С  у
у 
Для Як-52 при отсутствии обдувки от винта и убранных шасси и щитках:
с х0 = 0,0375: А = 0,062.
Выпуск шасси и щитков увеличивают с х0 :
с х шасси = 0.02: с хщитков = 0,04:
Остановка винта в полете увеличивает с х0
с хвинта = 0,023-0,03
С Х0 С Х нв С х
в) Аэродинамическое качество самолета – это критерий аэродинамического совершенства самолета численно равный отношению подъемной силы к силе лобового сопротивления (или их коэффициентов) при определенном угле атаки
 .
.
При наивыгоднейшем угле атаки аэродинамическое качество будет максимальным.
Для Як-52 К мах = 12,5 (с учетом обдувки крыла винтом), С у нв = 0,75 при угле атаки нв = 8 0 .
Выпуск шасси или щитков резко уменьшают аэродинамическое качество самолета.
Срыв потока с крыла приводит к уменьшению подъемной силы и увеличению лобового сопротивления при увеличении угла атаки.
2. Центр давления самолета.
Центр давления – это точка приложения результирующей аэродинамической силы. В зависимости от отклонения руля высоты он может перемещаться. В установившемся полете он совпадает с центом тяжести самолета.
Тема № 3. Силовая установка самолета.
Геометрические характеристики и классификация воздушных винтов
Самолет Як-52 имеет воздушный винт В530ТА-Д35, работающий совместно с регулятором оборотов Р-2. Винт имеет две лопасти, веслообразной формы.
Направление вращения винта левое.
Диаметр винта — 2,4 м.
Контрольное сечение на радиусе r = 1000 мм.
Угол установки лопасти в контрольном сечении, относительно
r ,: плоскости вращения винта
минимальный – 14.5 0 ;
максимальный – 34,5 0
Кинематические характеристики и возникновение аэродинамических сил.
φ — угол установки лопасти относительно плоскости вращения винта:
α — угол атаки сечения лопасти:
β – угол притекания струи.
 P R
P R
 X
X

u = r =2n c r плоскость вращения
Н= 2 π r tg φ — шаг винта.
H A = V / n c — поступь винта.
λ = H A / D = V / n c D — относительная поступь или коэф. скорости.
2 π r — длина окружности
При вращении лопасти крыла набегающий под углом атаки поток воздуха создает полную аэродинамическую силу, которая может быть разложена на силу тяги Р и силу сопротивления вращению винта Х.
P = ά ρ n c 2 D 4 — формула для определения силы тяги винта, где
ά – коэффициент силы тяги.
Мощность винта. Коэффициент полезного действия винта.
Различают тяговую и потребную мощность воздушного винта.
N P = P в V — тяговая мощность, затрачиваемая на перемещение самолета.
N B = β ρ n 3 c D 5 — потребная мощность винта, подводимая от двигателя для вращения винта.
β – коэффициент мощности.
 — коэффициент полезного действия винта.
— коэффициент полезного действия винта.
Аэродинамические характеристики винта
Аэродинамические характеристики винта — это зависимости коэффициентов тяги и мощности от относительной поступи винта.
 _
_
 ά φ = const
ά φ = const
3. Влияние высоты на мощность. Особенности работы винта с изменяемым шагом.
Мощность двигателя растет с увеличением оборотов и скорости полета; уменьшается — с ростом высоты полета.
Мощность, потребляемая воздушным винтом (и тяга винта) при постоянном угле установки лопастей с ростом скорости полета уменьшается.
Для поддержания тяги с ростом скорости полета шаг винта следует увеличивать, что делается автоматически, за счет регулировки оборотов двигателя (стремление двигателя к увеличению оборотов компенсируется автоматическим увеличением шага винта).
Конструктивно воздушный винт выполнен так, что при оборотах двигателя малого газа (48%) регулятор не позволяет вывести винта на большой шаг («затяжелить винт»).
Принудительное увеличение шага винта при взятии на себя рычага шага возможно только при оборотах двигателя больших оборотов малого газа.
Тема № 4. Горизонтальный полет самолета
Горизонтальный полет. Схема и соотношение сил в установившемся горизонтальном полете
Установившийся горизонтальный полет – это равномерное прямолинейное движение самолета на постоянной высоте.
— условие горизонтальности полета;
— условие постоянства скорости.
– коэффициент подъемной силы,
потребный для горизонтального полета
Скорость, потребная для горизонтального полета
 — каждой скорости горизонтального полета соответствует свой угол атаки и значение коэффициента подъемной силы.
— каждой скорости горизонтального полета соответствует свой угол атаки и значение коэффициента подъемной силы.
Самой маленькой скорости горизонтального полета должен соответствовать с Ymax , но полет на критическом угле атаки очень опасен из-за возможного срыва потока. Следовательно, самое большое используемое значение угла атаки должно быть ограничено. Этому углу атаки соответствует скорость, называемая минимально допустимой. Если ее значение выбрано по возможности совершать эволюции, то такая скорость часто называется эволютивной. Обычно в качестве минимально допустимой скорости выбирается скорость, соответствующая использованию значения с Y = 0,75 c Y max .
Для самолета Як-52 минимально допустимая скорость устанавливается из условия предотвращения непреднамеренного срыва в штопор:
в прямом полете 130 км/час;
в перевернутом полете 170 км/час.
Потребная тяга для установившегося горизонтального полета.
Х гп = Х гп 0 + Х гп инд . – лобовое сопротивление самолета в горизонтальном полете складывается из сопротивления при нулевой подъемной силе и сопротивления, обусловленного подъемной силой.
X г п = ( c X 0 + A c 2 Y го )ρ V 2 / 2 S = P п .
Тяга двигателя, необходимая для уравновешивания лобового сопротивления самолета в установившемся горизонтальном полете, называется потребной тягой.
Минимальной потребной тяги горизонтального полета соответствует скорость, называемая наивыгоднейшей.
 V нв пр. = 150-160 км/ч
V нв пр. = 150-160 км/ч

 Х гп P p
Х гп P p
Потребные и располагаемые мощности в горизонтальном полете
Кривые Жуковского по потребным для горизонтального полета мощностям позволяют найти экономическую скорость (скорость наибольшей продолжительности полета).
Пересечение кривых располагаемой и потребной мощности двигателя обуславливают значение максимальной скорости установившегося горизонтального полета. V max = 300 км/ч на H=500 м.
 р =P . V
р =P . V
V экон . V нв V max гп V гп
Влияние высоты и массы на скорости горизонтального полета
Из формул для скорости горизонтального полета видно, что при полете на одном и том же угле атаки приборное значение скорости от высоты зависеть не будет, но будет пропорционально увеличиваться с ростом массы (силы тяжести) самолета. С ростом высоты полета сильно уменьшается располагаемые тяга и мощность двигателя, при этом будет уменьшаться приборное значение максимальной скорости горизонтального полета.
Первые и вторые режимы полета. Техника выполнения горизонтального полета
Экономическая скорость делит диапазон скоростей полета самолета на две части.
При необходимости увеличить скорость горизонтального полета летчик увеличивает обороты двигателя и по мере роста скорости – уменьшает угол атаки самолета (отдает ручку от себя). На первых режимах полета при этом возрастает лобовое сопротивление самолета (потребная мощность) и на какой-то скорости, большей исходной, скорость полета станет установившейся. При выдерживании летчиком горизонтальности полета по вариометру и указателю высоты постоянство скорости будет поддерживаться автоматически за счет приростов избытка мощности.
Н 

а вторых режимах полета (на скорости меньшей экономической) случайное уменьшение скорости при выдерживании летчиком горизонтальности полета (выбирании ручки управления на себя) с ростом угла атаки будет увеличиваться лобовое сопротивление самолета (потребная мощность) и скорость будет интенсивно падать. Полет на вторых режимах опасен!
II режим I режим
Тема № 5. Подъем самолета
Условия установившегося подъема самолета. Уравнения движения при подъеме
Установившимся подъемом называется прямолинейное равномерное движение самолета с набором высоты.

P — X — GsinΘ = 0 (условие V=const)
Y – GcosΘ = 0 (условие Θ=const)
γ = 0 (условие прямолинейности)
 GsinΘ P
GsinΘ P


 X
X


 Θ υ GcosΘ
Θ υ GcosΘ

Связь между углами наклона траектории подъема, углом атаки и углом наклона
продольной оси самолета.
Угол тангажа – это угол между продольной осью самолета и плоскостью горизонта.
Угол наклона траектории – это угол между линией траектории и плоскостью горизонта.
При установившемся подъеме угол атаки – это угол между продольной осью самолета и линией траектории (направлением скорости невозмущенного набегающего потока).
Потребная скорость для подъема. Угол подъема.
Потребная для подъема самолета скорость определяется из условия постоянства угла наклона траектории:
 .
.
При малых углах набора высоты cosΘ ≈ 1, следовательно, потребная скорость при подъеме будет практически такая же, что и в горизонтальном полете.
Угол подъема (наклона траектории ) определяется из условия постоянства скорости:
 .
.
Поляра подъема самолета
Условие постоянства скорости на подъеме Р р – Р п = G sin Θ можно умножить на скорость полета V, тогда N р — N п = G Vsin Θ = G V у , где V у , — вертикальная скорость подъема.
Кривые Жуковского по потребным для горизонтального полета мощностям позволяют найти избытки мощности, которые можно использовать для набора высоты.

По этому графику можно построить зависимость вертикальной скорости набора высоты от скорости полета по траектории, которая называется полярой подъема.
Для самолета Як-52 режим максимальной скороподъемности (V Vy max ) достигается на приборной скорости полета 162 км/час при 100% оборотах двигателя. На высоте 500 м вертикальная скорость достигает значения 10 м/с, при использовании угла атаки близкого к наивыгоднейшему.
Режим наиболее крутого подъема (Θ мах ) достигается на приборной скорости 140 км/ч при 100% оборотах двигателя на высоте 500 м.
Угол наклона траектории достигает при этом 12 0 , используемый угол атаки около 10 0 .
 V Y
V Y
Θ мах
V Θ nax V Vy max V max V
Первый и второй режимы подъема
Если рассматривать кривые Жуковского по мощности, то экономическая скорость делит диапазон скоростей полета (подъема) на области первых и вторых режимов. При полете в области вторых режимов попытка увеличить угол или вертикальную скорость взятием ручки на себя приведет к уменьшение скорости полета и увеличению потребной для полета мощности. Это опасно из-за выхода самолета на большие углы атаки и возможности сваливания штопор.
2. Барограмма подъема. Теоретический, практический и динамический
потолки полета самолета
График набора высоты самолета в зависимости от времени называется барограммой подъема.
Установившийся подъем возможен только до тех пор, пока есть избыток тяги или мощности двигателя. Наибольшая высота, на которой избыток тяги становится нулевым на наивыгоднейшей скорости, или избыток мощности – на экономической, называется теоретическим потолком самолета.
Высота полета, при которой вертикальная скорость набора высоты на режиме максимальной скороподъемности уменьшается до 0,5 м/с, называется практическим потолком.
Максимальная высота, на которую может подняться самолет с использованием своей кинетической энергии (с потерей скорости), называется динамическим потолком полета.
Самолет Як-52 не имеет кислородного оборудования, поэтому на нем полеты на высотах более 4000 м запрещены. На режиме максимальной скороподъемности Як-52 набирает высоту 4000 м примерно за 15 мин.
Тема № 6. Планирование самолета
Условия установившегося планирования самолета. Уравнения движения
Планированием называется установившееся прямолинейное движение самолета с пологим снижением
 Y
Y
Gsin Θ = X (Условие V= const)
Gcos Θ = Y (Условие Θ = const)
2. Потребная скорость при планировании, угол планирования
Потребная при планировании скорость определяется из условия постоянства угла наклона траектории:
 . При малых углах Θ потребная скорость при планировании примерно равна потребной скорости для горизонтального полета.
. При малых углах Θ потребная скорость при планировании примерно равна потребной скорости для горизонтального полета.
Угол планирования определяется делением уравнений движения друг на друга:
 , то есть значение угла планирования обратно пропорционально используемому в полете аэродинамическому качеству.
, то есть значение угла планирования обратно пропорционально используемому в полете аэродинамическому качеству.
Полет самолета со снижением при тяге силовой установки меньшей потребной для горизонтального полета так же называют планированием. При этом используют понятие приведенного аэродинамического качества самолета:  .
.
Вертикальная скорость при планировании. Дальность планирования
Вертикальная скорость при планировании определяется из треугольника скоростей
V Y = V пл sin Θ ≈ V/K.
Наибольшая дальность планирования будет достигаться при использовании максимального аэродинамического качества, то есть на наивыгоднейшей скорости.
Поляра планирования (Указательница планирования)
Полярой планирования называется график зависимости вертикальной скорости планирования от скорости движения по траектории. Поляру планирования можно построить, вычислив для каждой точки поляры самолета (для каждого угла атаки) значения с у , с х и К. Далее, по значению качества определить угол планирования, по значению с у – скорость движения по траектории, по значению скорости и угла наклона траектории вертикальную скорость снижения.
По графику поляры можно определить угол планирования при любой установившейся скорости планирования, поэтому ее иногда называют указательницей траектории планирования.
Минимальный угол планирования достигается при использовании К max , и равен 3 0 .
Минимальная вертикальная скорость при планировании самолета Як-52 примерно равна 3 м/с.
Первый и торой режим планирования.
Наивыгоднейшая скорость делит интервал скоростей планирования на области первых и вторых режимов. При планировании в области первых режимов (на углах атаки меньших наивыгоднейшего), взятие летчиком ручки управления на себя приводит к увеличению угла атаки, уменьшению скорости планирования, угла планирования и вертикальной скорости планирования.
При планировании в области вторых режимов, взятие ручки управления на себя, приводит к увеличению угла атаки до значений больших наивыгоднейшего. При этом несмотря на уменьшение скорости движения по траектории, угол планирования увеличивается. Планирование в области вторых режимов опасно из-за возможности выхода на срывные углы атаки с последующим парашютированием или сваливанием самолета в штопор.
Влияние щитков, шасси и других факторов на угол и дальность планирования.
Выпуск шасси, отклонение щитков приводят к увеличению безиндуктивного лобового сопротивления самолета (с х 0 ). При этом, несмотря на увеличение значения наивыгоднейшего угла атаки и значения с у нв , максимальное аэродинамическое качество самолета уменьшается. При этом значения минимального угла планирования возрастают, а дальность планирования уменьшаются.
При выпуске шасси К max = 8,37, при отклонении щитков – 7,21, при выпуске шасси и отклонении щитков – 6,43.
На дальность планирования влияет встречный и попутный ветер. При попутном ветре дальность планирования возрастает на величину ut, где u- скорость ветра, t- время планирования.
Понятие о скольжении.
При планировании иногда требуется погасить лишнюю высоту, не изменяя скорость полета. При этом летчик отклонением педалей создает самолету угол скольжения, а для того, чтобы избежать кренения самолета в сторону данной ноги и сноса самолета, он одновременно отклоняет ручку управления в сторону противоположную данной ноге и создает самолету крен в ту же сторону. Такой полет называется прямолинейным полетом со скольжением.
Тема № 7. Взлет самолета
Определение взлета. Профиль и элементы взлета
Взлет – это ускоренное движение самолета от момента начала разбега до набора скорости и высоты, обеспечивающих безопасный перевод самолета в набор высоты.
Взлет состоит из следующих этапов: разбег, отрыв, выдерживание и подъем.
 о
о

 р. Н=25 м
р. Н=25 м

Разбег Выдерживание Подъем
Разбег делится на два этапа: разбег на трех колесах и разбег с поднятым передним колесом.
Разбег выполняется с целью достижения скорости отрыва. Выдерживание выполняется для достижения безопасной скорости подъема. Подъем выполняется для достижения безопасной скорости и высоты перевода самолета в набор высоты (обычно высоты стандартного препятствия).
Силы, действующие на самолет при взлете и их изменение на разбеге.
N + Y = G — условие прямолинейности:
P – X – F = m j > 0 – условие разгона.
F = f N, где f – коэффициент силы трения:
N – сила реакции земли.
f = 0.03-0.05 на бетоне:
f = 0.1-0.2 на травянистом грунте.
 Y
Y
При разбеге самолета по мере увеличения скорости растут аэродинамические силы X и Y. Сила реакции земли и, связанная с ней сила трения будут уменьшаться. Разбег выполняется сначала на трех опорах, а при достижении скорости 80-90 км/час летчик взятием ручки на себя поднимает переднее колесо и создает самолету взлетный угол атаки.
Скорость отрыва и длина разбега. Влияние на них основных факторов.
Скоростью отрыва называется скорость, при достижении которой на взлетном угле атаки, подъемная сила становится равной силе тяжести и самолет плавно отделяется от земли.
 . Для самолета Як-52 при взлетном угле атаки значение коэффициента подъемной силы с учетов обдувки крыла винтом и влияния близости земли достигает значения 1.26, чему соответствует скорость отрыва 120 км/ч.
. Для самолета Як-52 при взлетном угле атаки значение коэффициента подъемной силы с учетов обдувки крыла винтом и влияния близости земли достигает значения 1.26, чему соответствует скорость отрыва 120 км/ч.
При разбеге изменяется сила лобового сопротивления самолета и сила трения, однако их сумма остается примерно постоянной. В этом случае движение на разбеге можно считать равноускоренным: , где f ср = 0.06 – для бетона; 0.08 – для твердого грунта;
, где f ср = 0.06 – для бетона; 0.08 – для твердого грунта;
При постоянном ускорении время и длину разбега можно определить по следующим формулам:  .
.
Причины разворота самолета на разбеге
Винт левого вращения создает момент реакции М х , который кренит самолет, увеличивает силу реакции опоры на правое колесо и за счет силы трения создает момент направленный на разворот самолета вправо.
Кроме того, закрутка потока винтом левого вращения создает на вертикальном оперении самолета аэродинамическую силу Z зс , которая так же создает момент направленный на разворот самолета вправо.
 М х
М х
Все это приводит к тому, что на разбеге самолет Як-52 имеет тенденцию к развороту вправо, которая должна учитываться летчиком. Устранение разворота достигается на малой скорости раздельным торможением основных колес самолета, а при скорости большей 60 км/ч – только отклонением левой педали.
При подъеме переднего колеса на разбеге создается угловая скорость ω z , которая приводит к возникновению прецессионного момента от винта: как и у гироскопа ось вращения винта стремится совпасть с осью вынужденного вращения, то есть возникает момент, направленный на разворот самолета влево.
Влияние ветра на технику выполнения взлета.
Попутный и встречный ветер на технику взлета влияния практически не оказывает. Следует помнить, что попутный ветер увеличивает расстояние, проходимое самолетом относительно земли при взлете, а встречный – уменьшает его. При этом воздушные (приборные) скорости подъема переднего колеса и отрыва самолета остаются постоянными.

При наличии бокового ветра обтекание самолета при взлете происходит с углом скольжения β. При этом на киле возникает боковая аэродинамическая сила, которая стремиться накренить самолет в сторону противоположную ветру и развернуть его носом на ветер.
 Mx β
Mx β
Для борьбы с кренением летчик отклоняет элероны (ручка навстречу ветру), а для борьбы с разворотом – летчик отклоняет педали (против ветра). При этом самолет удерживается от сноса с полосы боковой силой реакции колес.
Взлетная дистанция. Техника выполнения взлета.
Взлетная дистанция самолета состоит из разбега и воздушного участка взлета, который составляют выдерживание и разгон с набором высоты.
Обычно для большинства самолетов воздушный участок равен 1-1,3 длины разбега, тогда
L взл = (2…2,3) L разб.
Техника выполнения взлета заключается в последовательном выполнении элементов взлета с учетом сил и моментов, которые появляются при изменении ветра, и других эксплуатационных факторов, при плавном и соразмерном отклонении рычагов управления.
При взлете необходимо:
Запросить у руководителя полетов разрешение на взлет. Отпустить рычаг управления тормозами, плавно увеличить обороты двигателя, не допуская изменения выбранного направления для взлета, начать разбег, удерживая ручку управления в нейтральном положении, довести обороты двигателя до полных. На разбеге самолет имеет тенденцию к развороту вправо, которая устраняется отклонением левой педали.
По достижению скорости 90 км/ч плавным движением ручки на себя поднять переднее колесо до взлетного положения. Отрыв самолета от земли происходит на скорости 120 км/ч.
При отрыве взгляд перенести на землю влево от продольной оси самолета на 25…30 0 и вперед на 25…30 м, следить за высотой, направлением в то же время не терять направления и не допускать крена.
Выдерживание самолета над землей производить с постепенным отходом от нее до скорости 160 км/ч, после чего плавно перевести самолет в набор высоты.
На высоте не менее 20 м убрать шасси. Проконтролировать уборку по сигнальным лампочкам и механическим указателям.
Тема № 8. Посадка самолета
Определение и элементы посадки
Посадкой называется замедленной движение самолета с высоты начала выравнивания до полной остановки в конце пробега или начала сруливания с ВПП.
Посадка обычно включает в себя предпосадочное планирование, выравнивание, выдерживание, приземление и пробег.
Н =25 м
=25 м
6 м 0.75 м
L пл L выр L выд L проб
Предпосадочное планирование производится с высоты 25-30 м до высоты начала выравнивания на скорости 160 км/ч с выпущенными шасси и посадочными щитками с постоянным углом планирования.
Выравнивание выполняется с высоты 6…5 м с целью погашения вертикальной скорости снижения за счет искривления траектории и должно быть закончено на высоте 0,75…1 м.
Выдерживание производится с целью погашения скорости движения по траектории, создания посадочного положения самолета и приближения его к земле на высоту 0,15…0,25 м.
Приземление (касание земли основными колесами) при посадочном угле атаки происходит при скорости 115…120 км/ч.
Пробег самолета по земле выполняется в два этапа (с поднятым и опущенным передним колесом) с целью погашения скорости движения самолета по траектории.
Силы, действующие на самолет на различных этапах посадки
В процессе выравнивания летчик увеличивает самолету угол атаки. При этом возрастает подъемная сила и лобовое сопротивление самолета. Траектория искривляется и угол планирования уменьшается до нуля.
Кроме того, в процессе выравнивания летчик уменьшает обороты двигателя до минимальных.
Y > Gcosθ ; P – X – Gsinθ Посадочная скорость. Длина пробега. Посадочная дистанция
Посадочная скорость зависит от тех же факторов, что и скорость отрыва  .
.
Длина пробега  , где
, где  определяется как полусумма ускорений в начале и в конце пробега. Длина пробега обычно больше длины разбега и составляет около 300 м.
определяется как полусумма ускорений в начале и в конце пробега. Длина пробега обычно больше длины разбега и составляет около 300 м.
Посадочная дистанция находится как сумма расстояний, проходимых самолетом относительно земли на всех этапах посадки.
Техника выполнения посадки
Техника выполнения посадки заключается в правильном и последовательном выполнении всех элементов посадки при плавном и координированном отклонении рулей. Основная сложность заключается в определении расстояния до земли (правильность направления взгляда) и соразмерности отклонения рулей в соответствии с темпом приближения земли. Взгляд с высоты 30 м должен быть направлен на 20…25 0 влево от продольной оси самолета и вперед на 25…30 м. После приземления на основные колеса нельзя тормозить и отдавать ручку управления от себя до касания земли переднего колеса.
Факторы, влияющие на технику выполнения посадки
Встречный ветер уменьшает посадочную скорость относительно земли, что является положительным фактором, но его необходимо учитывать, чтобы не произвести посадку до ВПП. Длина посадочной дистанции, выдерживания и пробега при этом уменьшается. Попутный ветер оказывает на посадку обратное влияние и здесь нельзя допускать посадку с «перелетом».
На самолете Як-52 посадка при боковой составляющей ветра более 6 м/с запрещена. Выполнения посадки при меньшей боковой составляющей ветра требует устранения сноса самолета за счет полета со скольжением (или с упреждением в курсе). К концу выдерживания крен самолета должен быть убран. Удержание самолета на полосе при боковом ветре требует отклонения руля направления, поэтому эффективное торможение невозможно, что приведет к увеличению длины пробега.
При посадке с неотклоненными щитками приходится выдерживать повышенные скорости планирования (170 км/ч), посадочная скорость при этом так же возрастает, что приводит к увеличению посадочной дистанции.
Ошибки при выполнении посадки. Особенности вынужденной посадки
Характерными ошибками на посадке являются: высокое выравнивание, взмывание и отделение от земли.
Высокое выравнивание можно исправлять, если оно закончено на высоте 1.5…2 м. Причиной высокого выравнивания чаще всего является планирование на повышенной скорости. При исправлении разрешается немного отдавать ручку от себя до высоты 1 м. Если выравнивание закончено на высоте более 2 м, следует плавно увеличить обороты и уйти на второй круг.
При взмывании в первой его фазе (при высокой скорости) необходимо отклонением ручки от себя прекратить удаление от земли, дождаться снижения самолета до высоты 0.75…1 м, а затем плавно и соразмерно выбирать ручку на себя.
При взмывании во второй фазе выдерживания ручку необходимо только задержать и, по мере снижения самолета, ее необходимо плавно выбирать на себя.
Если взмывание произошло до высоты более 2 м необходимо уходить на второй круг.
При скоростном отделении самолета от земли необходимо задержать ручку или немного отдать ее от себя до прекращения удаления, а затем выбирать ее на себя.
При нескоростном отделении самолета от земли ручку необходимо только задержать.
При отказе двигателя посадка выполняется на аэродром или выбранную площадку. При посадке на неровную площадку посадка производится с убранными шасси и щитками при использовании максимального аэродинамического качества самолета (расчетное К=7) на скорости 160 км/час.
Тема № 9. Устойчивость и управляемость самолета
Оси вращения самолета. Равновесие сил и моментов .

При рассмотрении устойчивость и управляемости используется связанная с самолетом система координат, в которой:
Ох 1 – продольная ось самолета (обычно совпадает со строительной горизонталью самолета),
Оy 1 – нормальная ось самолета (перпендикулярна оси Ох 1 и лежит в плоскости симметрии самолета),
Оz 1 – поперечная ось самолета (перпендикулярна плоскости симметрии самолета и направлена в сторону правого полукрыла).
Точка О (начало системы координат) обычно совмещается с центром тяжести самолета.
Моменты, действующие относительно этих осей, называются:
М х — момент крена (вызывает появление угла крена);
М у – момент рыскания (вызывает появление угла скольжения);
М z – продольный момент или момент тангажа (вызывает изменение углов атаки и тангажа самолета).
Если проекции суммарных сил на эти оси равны нулю, то говорят о равновесии сил, действующих на самолет. Если равны нулю суммарные моменты, действующие относительно этих осей, то говорят о равновесии моментов. При этом самолет совершает установившийся полет.
Равновесие сил и моментов может быть устойчивое, нейтральное и неустойчивое. В соответствии с этим вводится понятие устойчивости самолета.
Устойчивость – это способность самолета без вмешательства летчика возвращаться к исходному режиму полета после прекращения действия случайного возмущения.
Статическая устойчивость – это способность самолета без участия летчика создавать силы и моменты, направленные на устранение действия возмущения
Для простоты рассмотрения устойчивость разделяют на продольную (силы действуют в плоскости симметрии самолета) и боковую.
Центровка самолета. Виды центровок
Центровкой называют координату цента тяжести самолета, отмеренную от носка средней аэродинамической хорды (САХ) и выраженную в процентах ее длины.
 [%].
[%].
Различают предельно переднюю центровку (для Як-52 17%), предельно заднюю центровку (для Як-52 25%) и нейтральную центровку (для Як-52 30%).
При нейтральной центровке самолет не реагирует на изменение угла атаки. При предельно передней центровке самолет устойчив, но может быть тяжел в управлении. При предельно задней центровке самолет легко управляем и достаточно устойчив по углу атаки и перегрузке.
Продольная устойчивость самолета
При рассмотрении устойчивости и управляемости самолета используется понятие фокуса самолета.
Аэродинамический фокус – это точка приложения приращения подъемной силы, вызванного изменением угла атаки. Его координата примерно совпадает с координатой нейтральной центровки самолета.
а) Продольная статическая устойчивость по перегрузке – это способность самолета без участия летчика создавать силы и моменты, направленные на восстановления исходного угла атаки при его случайном изменении.
 Y
Y
б) Продольная устойчивость самолета по скорости
Способность самолета без вмешательства летчика сохранять скорость исходного режима полета называется устойчивостью по скорости.

При увеличении скорости полета возрастает и подъемная сила, если летчик не уменьшает угол атаки. При этом, самолет переходит в набор высоты и появляется составляющая силы тяжести, которая направлена на уменьшение скорости полета.
 — условие устойчивости самолета по скорости.
— условие устойчивости самолета по скорости.
Работа руля высоты и триммера
При дозвуковых скоростях полета отклонение руля высоты вызывает изменение давления по всей поверхности горизонтального оперения.
Аэродинамическая сила на нем получается достаточно большой и эффективность руля высоты оказывается высокой:
M z рв = Y го * x го .
 Y 1
Y 1

Изменение распределение давления на самом отклоненном руле высоты приводит к появлению на нем аэродинамической силы Y 1 , которая на плече х 1 создает шарнирный момент руля высоты M ш рв = Y 1 x 1 , стремящий поставить руль в нейтральное положение. Для удержания руля в отклоненном положении летчик прикладывает усилие к ручке управления. Это усилие с ручки управления можно снять за счет отклонения триммера, который создает маленькую силу Y 2 , но на большом плече х 2 . Эта сила способна создать момент, равный по величине шарнирному, но противоположный по знаку.
Продольная управляемость самолета
Продольная управляемость — это способность самолета изменять углы атаки и скорость полета при отклонении летчиком руля высоты.
а) В прямолинейном полете (балансировка).
При увеличении скорости, чтобы не увеличивалась подъемная сила и сохранялась горизонтальность полета, летчик должен уменьшать угол атаки, для чего он отдает ручку управления от себя (отклоняет руль высоты вниз). Это процесс называется балансировкой самолета, а кривая зависимостей отклонения руля высоты, ручки управления или усилий на ней от скорости полета называется балансировочной диаграммой.
Р  В давить
В давить
б) Управляемость в криволинейном полете – это способность самолета изменять угол атаки и перегрузку в ответ на отклонение летчиком руля высоты.
Продольная управляемость в криволинейном полете оценивается градиентами отклонения руля высоты, ручки управления или усилий на ней по перегрузке.
 — это градиент усилий на ручке управления по перегрузке, численной равный величине прироста тянущего усилий на ручке управления для изменения нормальной перегрузки на единицу.
— это градиент усилий на ручке управления по перегрузке, численной равный величине прироста тянущего усилий на ручке управления для изменения нормальной перегрузки на единицу.
Самолет Як-52 обладает хорошими характеристиками продольной управляемости в криволинейном полете. Дополнительные усилия, которые надо приложить к ручке управления для изменения нормальной перегрузки на единицу изменяются от 4 до 10 кГ в зависимости от центровки самолета, скорости полета, режима работы двигателя. Для увеличения нормальной перегрузки на единицу к ручке надо прикладывать тянущее усилие, которое считается отрицательным.
Боковая устойчивость самолета
Боковая устойчивость самолета определяется наличием и соотношением путевой и поперечной устойчивости.
Путевая (флюгерная) статическая устойчивость – это способность самолета без участия летчика создавать силы и моменты, направленные на устранение угла скольжения. Она обеспечивается за счет силы, возникающей на вертикальном оперении самолета при его обтекании под углом скольжения. Точка приложения этой силы называется боковым аэродинамическим фокусом.
Условием путевой статической устойчивости самолета является заднее относительно центра тяжести положение бокового аэродинамического фокуса: х F бок > x Т . При этом создается момент M Y = Z β (х Т – х F бок ), разворачивающий самолет и стремящийся устранить угол скольжения.
Поперечная статическая устойчивость – это способность самолета без вмешательства летчика, развитием скольжения на опущенное полукрыло, создавать силы и моменты, направленные на устранение исходного угла крена.
Условием поперечной статической устойчивости является верхнее относительно цента тяжести расположение бокового аэродинамического фокуса: Y F бок > Y Т .
При этом создается момент М Х = Z β (y Т – y F бок ), направленный на устранение угла скольжения.
 M X
M X
Боковая устойчивость самолета обеспечивается при условии, что в боковом движении максимальная угловая скорость устранения крена будет равна или не более чем в 2,5 раза больше максимальной угловой скорости устранения угла скольжения.
Боковая балансировка самолета.
а) В прямолинейном полете без скольжения.
Самолет Як-52 с винтом левого вращения за счет силы реакции винта и косой обдувки вертикального оперения имеет тенденцию к развороту вправо и кренению в правую сторону. Уравновешивание этих моментов моментами от отклонения руля направления и элеронов и является боковой балансировкой самолета в прямолинейном полете без скольжения. При такой балансировке летчик давит на левую педаль и отклоняет влево ручку управления. Для снятия усилий с рычагов управления на руле направления и элеронах самолета Як-52 имеются специальные пластинки, которые отгибаются и действуют так же как триммер. Снять усилия на педалях и ручке управления по крену удается только для какой-то определенной скорости (обычно 250 км/час).
б) В прямолинейном полете со скольжением.
Если необходимо лететь прямолинейно и при этом иметь угол скольжения, то летчик отклонением педали удерживает самолет от устранения угла скольжения. Для компенсации возникающих при этом боковой силы и момента крена летчик накреняет самолет и отклоняет ручку управления в сторону противоположную данной педали. В зависимости от потребного угла скольжения необходимо отклонять педали и ручку управления на определенную величину и соответственно прикладывать к ним определенные усилия. Графики этих зависимостей могут служить характеристиками боковой управляемости самолета в прямолинейном полете со скольжением. Боковая управляемость самолета Як-52 считается хорошей. Например, для полета с углом скольжения 15 0 требуется прикладывать усилие к педали около 50 кг.
Боковая управляемость самолета
В криволинейном полете боковую управляемость принято оценивать возможностью самолета развивать угловую скорость вращения относительно продольной и нормальной осей. Обычно при пилотировании летчик для создания угловой скорости кренения отклоняет ручку управления и элероны, а для борьбы с проявлением поперечной устойчивости самолета одновременно и координировано отклоняет педаль так, чтобы не возникал угол скольжения (держит шарик указателя скольжения в центе). Основной характеристикой управляемости при этом будет градиент усилий по угловой скорости кренения самолета. Для Як-52 для задания угловой скорости кренения в 1 рад/с требуются усилия на ручке от 5 до 10 кг в зависимости от скорости полета.
Тема № 10. Штопор
Штопором называется неуправляемое движение самолета по спиральной, обычно нисходячщей траектории на закритических углах атаки.
Основоположником теории штопора является профессор Пышнов В.С.
Ш
 топор может быть прямым и обратным (выполняемым на положительных и отрицательных закритических углах атаки), крутым (с отрицательным углом тангажа 50…70 0 ) и плоским (с отрицательным углом тангажа 20…30 0 ).
топор может быть прямым и обратным (выполняемым на положительных и отрицательных закритических углах атаки), крутым (с отрицательным углом тангажа 50…70 0 ) и плоским (с отрицательным углом тангажа 20…30 0 ).
П отеря высоты за виток крутого штопора составляет 100…150 м (время 4…4,5 с), плоского – 50…80 м (время витка 2,5…3 с). В процессе вывода самолета из штопора дополнительно теряется 150…200 м высоты.
отеря высоты за виток крутого штопора составляет 100…150 м (время 4…4,5 с), плоского – 50…80 м (время витка 2,5…3 с). В процессе вывода самолета из штопора дополнительно теряется 150…200 м высоты.
При крутом штопоре углы атаки достигают 30 0 , а при плоском –
П 

 ричиной штопора является авторотация крыла на закритических углах атаки. Известно, что при нормальном обтекании на опускающейся половине крыла угол атаки и подъемная сила возрастают, а на поднимающейся – уменьшаются. При этом возникает демпфирующий момент крена, направленный против угловой скорости вращения. На закритических углах атаки на опускающемся полукрыле при возрастании угла атаки подъемная сила резко уменьшается, а на поднимающемся – она может и увеличиться (точки 1-2). Это приводит к появлению раскручивающего момента и возрастанию угловой скорости вращения крыла до тех пор, пока подъемные (точнее, нормальные) силы на полукрыльях не уравновесятся (точки 1 1 -2 ! ). Такая скорость вращения и будет называться скоростью вращения авторотации.
ричиной штопора является авторотация крыла на закритических углах атаки. Известно, что при нормальном обтекании на опускающейся половине крыла угол атаки и подъемная сила возрастают, а на поднимающейся – уменьшаются. При этом возникает демпфирующий момент крена, направленный против угловой скорости вращения. На закритических углах атаки на опускающемся полукрыле при возрастании угла атаки подъемная сила резко уменьшается, а на поднимающемся – она может и увеличиться (точки 1-2). Это приводит к появлению раскручивающего момента и возрастанию угловой скорости вращения крыла до тех пор, пока подъемные (точнее, нормальные) силы на полукрыльях не уравновесятся (точки 1 1 -2 ! ). Такая скорость вращения и будет называться скоростью вращения авторотации.
На скорость самовращения большое влияние оказывает скольжение. При скольжении на внешнее (поднимающееся) полукрыло скорость самовращения увеличивается, а при скольжении на внутреннее – уменьшается..
Взаимодействие сил при штопоре
В 
процессе штопора самолет стремится развить скольжение на внешнее полурыло из-за возрастания сопротивления внутреннего полукрыла на закритическом угле атаки. Это приводит к появлению дополнительного раскручивающего момента и увеличению скорости самовращения. Кроме того, при вращении самолета вокруг нормальной оси проявляются инерционные силы и связанный с ними момент тангажа, которые стремятся увеличить самолету угол атаки и тангажа. Все это вместе часто приводит к неравномерности вращения самолета при штопоре и переходу крутого штопора в плоский.
2, Вывод самолета из штопора.
Для вывода из штопора за 30 0 до намеченного ориентира необходимо сначала энергично и до отказа отклонить педаль в сторону, противоположную вращению, и вслед за этим отдать ручку управления от себя за нейтральное положение строго по продольной оси самолета. Как только прекратится вращение, немедленно поставить педали и ручку управления в нейтральное положение, набрать скорость 160…170 км/ч, затем, плавно выбирая ручку управления на себя, вывести самолет из пикирования. При подходе капота к линии горизонта увеличить наддув двигателя и вывести самолет в горизонтальный полет.
Тема № 11. Фигуры простого пилотажа
Назначение и условия выполнения фигур пилотажа
Пилотажем называется маневрирование самолета с целью выполнения определенных фигур в воздушном пространстве. К фигурам простого пилотажа относятся: вираж, горизонтальная восьмерка, спираль, пикирование, горка с углами до 45 0 .
При выполнении пилотажа летчику необходимо искривлять траекторию и создавать перегрузки, которые могут быть нормальными, продольными и боковыми:


 .
.
В  процессе маневрирования на самолете Як-52 необходимо помнить о влиянии гироскопического момента винта левого вращения:
процессе маневрирования на самолете Як-52 необходимо помнить о влиянии гироскопического момента винта левого вращения:
при поднятии капота самолет разворачивает влево;
при опускании капота самолет разворачивает вправо;
при развороте самолета вправо поднимается капот;
при развороте самолета влево капот опускается.
Вираж – это криволинейный полет самолета в горизонтальной плоскости с разворотом на 360 0 .
Часть виража называется разворотом. Вираж, выполняемый с постоянной скоростью и углом крена, называется установившимся. Установившийся вираж, выполняемый без скольжения, называется правильным.
а) Схема сил и уравнения движения
P – X = 0 — условие постоянства скорости на вираже.
Y cos γ — G = 0 — условие горизонтальности полета.
 — условие искривления траектории в горизонтальной плоскости, где r в – радиус виража.
— условие искривления траектории в горизонтальной плоскости, где r в – радиус виража.

Перегрузки на вираже. Потребная мощность на вираже.
На правильном вираже выполняется условие Y cos γ — G = 0, откуда можно определить нормальную перегрузку, потребную при правильном вираже,  .
.
При этом вираж с креном 30 0 следует выполнять с нормальной перегрузкой 1.15, с креном 45 0 – 1.41, с креном 60 0 – 2.
При создании необходимой перегрузки на вираже летчик увеличивает угол атаки самолета, а при этом увеличивается и лобовое сопротивление самолета. Для его уравновешивания необходимо увеличивать тягу и мощность двигателя.
Мощность двигателя, необходимая для уравновешивания лобового сопротивления самолета на вираже, называется потребной мощностью на вираже.
Радиус и время выполнения виража. Предельные виражи
Радиус виража можно определить из условия искривления траектории в горизонтальной плоскости:
 .
.
Время выполнения виража определяется из соотношения длины окружности и скорости полета:
 .
.
Например, на скорости V пр = 200 км/ч и высоте полета 1000 м с креном 60 0 самолет Як-52 выполняет вираж с радиусом 200 м за время 22 секунды.
Если параметры виража будут ограничены какими-либо пределами (максимально допустимыми перегрузками, креном, углом атаки или мощностью двигателя), то такие виражи называются предельными.
Техника выполнения виражей.
Вираж с креном 30…45 0 выполняется на скорости 190 км/час, с креном 60 0 на скорости 210 км/час.
Перед выполнением виража на соответствующей скорости самолет триммируется при оборотах двигателя 82%.
При вводе в вираж движение ручкой и педалями должно быть координировано. Нужная на вираже перегрузка определяется по неизменности положения высоты линии горизонта на остеклении фонаря кабины. Тяга двигателя увеличивается за счет увеличения наддува.
Ввод из виража должен осуществляться заблаговременно (за 30…50 0 до намеченного ориентира) при координированном отклонении ручки и педалей.
Спираль. Схема сил и уравнения движения на спирали
Спираль – это фигура пилотажа, при выполнении которой самолет движется по спиральной траектории со снижением (нисходящая спираль) или с набором высоты (восходящая спираль) на эксплуатационных углах атаки.


P + P + GsinΘ – X = 0 — условие постоянства скорости;
Ycosγ — GcosΘ = 0 — условие постоянства угла наклона траектории;
 — условие искривления траектории.
— условие искривления траектории.
X
 — перегрузка на спирали.
— перегрузка на спирали.
Y cosγ Y
cosγ Y
 Ysin γ
Ysin γ
Радиус и шаг спирали. Наивыгоднейшая спираль
Радиус спирали определяется из условия искривления траектории:
 .
.
Высота, которую самолет теряет или набирает за один виток спирали, называется шагом спирали.
Спираль, за один виток которой теряется минимум высоты, называется наивыгоднейшей.
На самолете Як-52 наивыгоднейшая спираль выполняется на экономической скорости, равной 140 км/час. За виток такой спирали при крене 45 0 теряется 130 м высоты.
Техника выполнения спирали
Спираль выполняется на скорости 180 км/час при крене 45 0 . В режиме планирования установить скорость 180 км/час при задросселированном двигателе. Ввод осуществляется на намеченный ориентир плавным и координированным отклонением ручки и педалей. Заданный угол крена на спирали фиксируется отклонением ручки. Скорость поддерживается изменением угла планирования.
Вывод из спирали производится координированным отклонением ручки и педалей в сторону, противоположную крену. При это во избежание потери скорости вначале убрать крен и угловое перемещение, а затем вывести самолет в горизонтальный полет.
1. Пикирование с углами до 45 0
Пикированием называется фигура пилотажа, в процессе выполнения которой самолет круто снижается с набором скорости.

Ввод самолета в пикирование может осуществляться с прямой и с разворота. Искривление траектории в вертикальной плоскости достигается за счет силы тяжести, которая превосходит по своей величине подъемную силу или ее составляющую Ycosγ.
В процессе пикирования по мере увеличения скорости летчик поддерживает значение подъемной силы за счет уменьшения угла атаки, т.е. отдает ручку от себя.
В процессе вывода из пикирования летчик искривляет траекторию за счет создания положительной нормальной перегрузки (Y > GcosΘ).
В учебных целях пикирование выполняется с углами 30 и 45 0 на намеченный ориентир. Ввод осуществляется на скорости 140 км/час при предварительной балансировки самолета на скорости 250 км/час.
Вывод из пикирования следует начинать на скорости не более 250 км/час. При этом плавным движением ручки управления на себя создается перегрузка не более 5. Следует помнить, что вывод из пикирования не может быть осуществлен мгновенно: при увеличении угла атаки и тангажа может создаваться иллюзия, что самолет находится в горизонтальном полете, однако при этом будет только искривляться траектория..
За время вывода самолета из пикирования теряется высота:
 .
.
Горка с углами до 45 0
Горка это фигура пилотажа, в процессе которой самолет энергично набирает высоту с потерей скорости.
Ввод самолета в горку осуществляется с прямой за счет искривления траектории при создании положительной нормальной перегрузки.
При достижении заданного угла горки летчик фиксирует и поддерживает этот угол: по мере уменьшения скорости ручка управления выбирается на себя для увеличения угла атаки и поддержания нужной величины подъемной силы.
Вывод из горки производится обычно с прямой для чего летчик отклоняет ручку от себя и создает перегрузку до – 3.
 Y
Y
В учебных целях ввод самолета в горку производится на скорости 300 км/час при оборотах двигателя 82%. Вывод из горки начинается при скорости 170 км/час с таким расчетом, чтобы он был закончен при скорости 140 км/час.
Набор высоты за горку осуществляется главным образом за счет потери кинетической энергии самолета:  .
.
Тема № 12. Фигуры сложного пилотажа
Боевой разворот — это фигура пилотажа, при выполнении которой самолет разворачивается на 180 0 с одновременным набором высоты.
 Y Y cosγ Ycosγ
Y Y cosγ Ycosγ




 P GsinΘ
P GsinΘ




 Y sinγ X
Y sinγ X
 G cosΘ G
G cosΘ G
По соотношению сил боевой разворот можно представить как сочетание горки и неустановившегося виража.
Для выполнения боевого разворота необходимо обеспечить искривление траектории вверх на вводе и вниз – на выводе. Кроме того, в процессе всего боевого разворота необходимо обеспечивать искривление траектории в горизонтальной плоскости. При наличии запаса скорости одновременное искривление траектории в двух плоскостях может быть достигнуто за счет создания большой перегрузки. По мере потери скорости из- за опасности выхода на большие углы атаки перегрузку приходится уменьшать и траектория в вертикальной плоскости может начать искривляться в другую сторону. Зато, при уменьшении скорости и значительном угле крена, появляется возможность осуществлять быстрый разворот в горизонтальной плоскости с малым радиусом траектории.
Техника выполнения боевого разворота. Ошибки и их исправление.
Ввод в боевой разворот выполняется на скорости 300 км/час при оборотах двигателя 82% и полном наддуве.
Перед вводом намечается ориентир, осматривается воздушное пространство. Плавным движением ручки управления на себя и в сторону разворота с одновременным движением педалей в ту же сторону создается угол кабрирования 10…15 0 и крен 10…15 0 .
Темп ввода в боевой разворот должен быть таким, чтобы после разворота на 120 0 самолет имел крен 60 0 и угол тангажа 40…50 0 . При дальнейшем развороте следует удерживать это положение самолета.
При достижении разворота на 150 0 координированным отклонением ручки и педалей в сторону, противоположную развороту, начать вывод самолета из разворота с таким расчетом, чтобы скорость при выводе была не менее 140 км/час.
Отклонения от предписанной методики выполнения боевого разворота обычно приводит:
к ранней потере скорости при перетягивании ручки управления на себя при вводе;
к малому набору высоты при излишне больших кренах.
При выполнении боевого разворота следует помнить об особенностях самолета с винтом левого вращения:
— при правом развороте он сам стремится увеличить угол крена и угол тангажа;
при левом развороте он сам стремиться уменьшить угол крена и тангажа.
Управляемая бочка – это фигура пилотажа, при выполнении которой самолет поворачивается относительно продольной оси на 360 0 с сохранением общего направления полета.
Управляемые бочки различают по скорости вращения на быстрые и замедленные. Бочки, выполняемые на больших скоростях и околокритических углах атаки, называются штопорными бочками.
Бочки могут быть горизонтальными, восходящими и нисходящими, а так же одинарными, полуторными, двойными, тройными и многократными.
Управляемые бочки выполняются за счет отклонения элеронов, при помощи которых летчик имеет возможность регулировать угловое вращение.
Основное условие прямолинейности выполнения бочки является уравновешивание силы тяжести за счет подъемной силы – положительной в прямом положении самолета (крен 0 0 ) и отрицательной в перевернутом положении самолета (крен 180 0 ). При кренах 90 и 270 0 уравновешивание силы тяжести достигается за счет боковой силы, развиваемой самолетом при наличии угла скольжения на фюзеляже и вертикальном оперении. В промежуточных положениях сила тяжести уравновешивается составляющими подъемной и боковой сил.



 Y Z — Y — Z Y
Y Z — Y — Z Y


 G G G G G
G G G G G
Техника выполнения бочки. Ошибки и их исправление.
Выбрать характерный ориентир для ввода и вывода. Установить скорость по прибору 230 км/час при оборотах двигателя 82% и полном наддуве.
Взятием ручки управления на себя создать угол кабрирования 15…20 0 , зафиксировать самолет в этом положении легкой отдачей ручки управления от себя и отклонить ее в сторону выполнения бочки. Как только самолет достигнет крена 45 0 , не замедляя вращения, начать слегка отдавать ручку управления от себя для предотвращения опускания капота самолета ниже горизонта в положении вверх колесами.
В положении на «ноже» (90 и 270 0 ) необходимо отклонять верхнюю педаль для удержания капота выше линии горизонта. В перевернутом полете педали находятся в нейтральном положении.
После прохода перевернутого положения необходимо за 50…60 0 до выхода в горизонтальный полет удерживать нос самолета от опускания ниже горизонта увеличением нажима на педаль в сторону вращения , а за 30…40 0 – отклонением ручки на себя.
Как только самолет подойдет к горизонтальному положению, ручку управления и педаль необходимо отклонить в сторону, обратную вращению, а после прекращения вращения – поставить в нейтральное положение.
мал угол кабрирования перед вводом – бочка выполняется со снижением;
опускание капота ниже линии горизонта в перевернутом полете – мало отклонение ручки от себя;
мало отклоняется педаль в сторону вращения – самолет вращается с большим радиусом;
неравномерное вращение – опускается ручка управления в процессе вращения;
воронкообразное вращение – большое отклонение педали.
Петля Нестерова. Схемы сил и условия выполнения
Петля Нестерова – это фигура пилотажа, при выполнении которой самолет выполняет замкнутую кривую в вертикальной плоскости с сохранением направления полета после вывода.
Такая фигура была впервые выполнена П.Н. Нестеровым 9 сентября 1913 года.

При вводе в петлю схема сил такая же как на вводе в горку.
В верхней точке петли искривлению траектории вниз способствует , как сила тяжести, так и подъемная сила.
На выводе их петли схема сил такая же, как и при выводе самолета из пикирования.
Исследования показывают, что для выполнения петли необходимо:
на вводе скорость должна быть не менее чем в два раза больше, чем минимально допустимая скорость;
перегрузка при вводе в петлю должна быть не менее четырех.

 P
P
 X
X
Техника выполнения петли Нестерова
Перед выполнением петли наметить ориентир для вывода. Увеличить скорость до 300 км/час по прибору.при оборотах двигателя 82% и полном наддуве. Плавным движением ручки на себя перевести самолет на кабрирование.
Продолжая выбирать ручку управления на себя, создать угловую скорость вращения с таким расчетом, чтобы при угле кабрирования 40…50 0 перегрузка была 4…4,5, а скорость в верхней части петли не менее 140 км/час.
В верхней точке петли с появлением в поле зрения горизонта уточнить положение самолета. Когда капот самолета подойдет к горизонту, убрать наддув и плавным движением ручки управления на себя перевести самолет в пикирование.
При достижении скорости 200 км/час дальнейшим взятием ручки управления на себя выходить в горизонтальный полет с таки расчетом, чтобы скорость в конце вывода была равна 260..270 км/час. При угле пикирования 50…40 0 увеличить наддув двигателя до необходимой величины для выполнения следующего задания.
Полупетля и переворот
Полупетля – это фигура пилотажа, при выполнении которой самолет описывает восходящую часть петли Нестерова с последующим поворотом относительно продольной оси на 180 0 и выходом в горизонтальный полет в направлении, обратном вводу.
Полупетля представляет собой сочетание восходящей части петли Нестерова и полубочки (штопорной или управляемой).
Для выполнения полубочки необходима скорость не менее 170 км/час, что обеспечивает выход в горизонтальный полет на скорости 140 км/час, поэтому ввод в фигуру осуществляется на скорости 320 км/час.
Схемы сил и техника выполнения полупетли такая же как и восходящей части петли Нестерова и начала выполнения бочки.
За полупетлю самолет набирает высоту около 330 м.
Переворот – это фигура пилотажа, при выполнении которой самолет поворачивается вокруг продольной оси на 180 0 с последующим движением по нисходящей траектории и выходом в горизонтальный полет в направлении обратном вводу.

Переворот представляет собой сочетание полубочки и нисходящей части петли Нестерова.
Соответственно, схемы сил и техника выполнения соответствуют выполнению полубочки и нисходящей части петли Нестерова.
Ввод в переворот выполняется на скорости 170 км/час при оборотах двигателя 82%.
После выполнения полубочки и прекращения вращения самолета следует уменьшить наддув на 2/3 и ввести самолет в пикирование.
По достижении скорости 200…210 км/час начать выводить самолет из пикирования с таким расчетом, чтобы закончить вывод на скорости 280 км/час.
Пикирование и горка с углами более 45 0 . Поворот на горке.
Пикирование с большими углами по технике выполнения похоже на нисходящую часть петли Нестерова, а горка – на восходящую часть петли Нестерова, при выполнении которых на небольшом участке траектории поддерживается прямолинейность полета. Следует помнить, что вывод из крутого пикирования приводит к большой потере высоты.
Поворот на горке осуществляется , главным образом за счет силы тяжести, а подъемная сила не должна мешать искривлению траектории вниз. При этом при нулевом угле атаки и малой скорости (50…80 км/час при горке с углом 90 0 ) плавным, но коротким отклонением педали полностью в сторону желаемого разворота самолет вводится в разворот. Для компенсации возникающего при этом крена ручку управления необходимо отклонять в сторону внешнего полукрыла.
Тема № 13. Дальность и продолжительность полета
Основные определения дальности и продолжительности полета
В практике оценки дальности и продолжительности полета самолета различают техническую и практическую дальность и продолжительность.
Техническая дальность – это максимальное расстояние, которое может пролететь самолет до полной выработки топлива с учетом пути при наборе высоты и планировании в штиль и стандартных атмосферных условиях.
L техн. = L нв + L гп + L пл.

Техническая продолжительность – это максимальное время полета самолета до полной выработки топлива с учетом времени полета по кругу перед посадкой и на посадку:
t техн = t нв + t гп + t пл + t круга .
Техническую дальность и продолжительность на практике реализовать невозможно, поэтому и вводится понятие практической дальности и продолжительности полета.
Наибольшая величина воздушного пути, проходимого самолетом при заданном профиле и режиме полета с учетом всех потребных расходов и необходимых запасов топлива, называется практической дальностью полета, а время, необходимое для такого полета, называется практической продолжительностью полета.
Дальность и продолжительность полета зависят от запаса топлива, высоты и скорости полета, режима работы двигателя, температуры воздуха, атмосферных условий и так далее.
Часовой и километровый расходы топлива.
Часовой расход топлива Q ч [кг/час] – это расход топлива данного самолета за один час полета.
Километровый расход топлива q [кг/км] – это расход топлива данного самолета на один километр пути.
Основную часть пути и затрачиваемого времени самолет реализует в горизонтальном полете, для которого дальность и продолжительность определяется по формулам:
L гп = m т. гп / q ; t гп = m т. гп / Q ч ,
где m т. гп — располагаемая масса топлива на горизонтальный полет.
Для каждого двигателя существует техническая характеристика, называемая удельным расходом топлива. Для поршневых двигателей она показывает расход топлива в килограммах, необходимый для создания мощности в одну лошадиную силу в течении одного часа.
 .
.
Удельный расход топлива, зависит главным образом от оборотов двигателя и температуры окружающего воздуха. Для двигателя самолета Як-52 он минимален при оборотах примерно 59% и равен 0,21…0,23 кг/л.с. час. Для сравнения – на взлетных оборотах – с уд. = 0,285…0,315 кг/л.с. час. Эти данные соответствуют температурам окружающего воздуха 10…45 0 С.
Часовой расход топлива зависит главным образом от используемой мощности двигателя и равен:
Q ч = c уд . N потр .
Следует ожидать, что минимальный часовой расход топлива в горизонтальном полете будет при экономической скорости полета, когда потребная для полета мощность – минимальна.
Километровый расход топлива можно определить, если часовой расход топлива поделить на скорость полета:
 .
.
Режим наибольшей дальности полета
Если построить график зависимости часового расхода топлива, потребного для горизонтального полета, от скорости полета, то, проведя к нему касательную из начала системы координат, можно получить скорость, при которой будет минимален километровый расход топлива в горизонтальном полете.
Для самолета Як-52 на высоте 500 м скорость максимальной продолжительности составляет примерно 190 км/час по прибору (192 км/час – истинная).
При наличии встречного ветра для уменьшения сноса и достижения максимальной дальности скорость полета необходимо увеличить
При наличии попутного ветра достижение максимальной дальности может быть обеспечено при уменьшении скорости полета относительно режима максимальной дальности в штиль.
 Q ч
Q ч
u поп. u встр V эк V q min V гп
Выполнение расчета на дальность и продолжительность полета
Для самолета Як-52 основная часть пути при полете на дальность преодолевается в горизонтальном полете, поэтому для расчетов необходимо определить запас топлива, который может быть израсходован в этом режиме.
m т гп = m бак – m зем. – m взл. нв – m пл — m кр — m нз = 90 – 1.5 – 2,25 – 0,375 – 3 — 9 = 73.875 [кг],
где: m бак – запас топлива в баке;
— m зем. — расход топлива на земле для опробования и прогрева двигателя;
m взл. нв — расход топлива на взлет и набор высоты 500 м;
m пл — расход топлива на снижении (планировании);
m кр — расход топлива для полета по кругу;
m нз — 10% навигационный запас топлива.
На приборной скорости 190 км/час километровый расход топлива составляет q = 0,1455 кг/км, а часовой – Q ч = 28 кг/час. При этих условия определяем максимальную дальность полета самолета Як-52 на высоте 500 м и соответствующую ей продолжительность полета:
L гп = m т гп / q = 73,875 / 0,1455 = 508 км;
t = t гп + t кр = m т гп / Q ч = 73,875 / 28 + t кр = 2 часа 39 мин + 7 мин = 2 часа 46 мин..
В таблицах пособия летчику запасы и расходы топлива указываются не в килограммах, а в литрах. Перевод литров в килограммы легко осуществить, зная, что плотность авиационного бензина равняется 0,75 кг/литр.
Васюков А.В. Аэродинамика, динамика полета и практическая аэродинамика учебного самолета Л-29. ТВВАУЛ. 1982.
Коровин А.Е., Новиков Ю.Ф. Практическая аэродинамика и динамика полета самолетов Як-52 Як-55. М., ДОСААФ СССР, 1989.
Коровин А.Е. Як-52. Пособие летчику. М., ДОСААФ СССР, 1987.
http://ooobskspetsavia.ru/2015/09/15/polnaya-sistema-uravnenij-dvizheniya-samoleta/
http://gigabaza.ru/doc/90086-pall.html