Уравнения прямых и плоскостей
Поверхности и линии первого порядка.
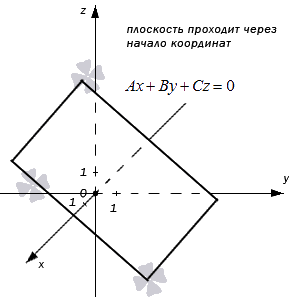
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,\label
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть \(A^<2>+B^<2>+C^ <2>\neq 0\). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,\label
$$
при условии \(A^<2>+B^ <2>\neq 0\).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения \eqref
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
 Рис. 6.1
Рис. 6.1
Вектор \(\overrightarrow
$$
\boldsymbol
$$
Наоборот, какое бы число мы ни подставили в формулу \eqref
Уравнение \eqref
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Получим теперь параметрические уравнения плоскости. Обозначим через \(\boldsymbol
\) и \(\boldsymbol\) ее направляющие векторы, а через \(\boldsymbol
 Рис. 6.2
Рис. 6.2
Вектор \(\overrightarrow
\) и \(\boldsymbol\) не коллинеарны, в этом и только этом случае \(\boldsymbol
$$
\boldsymbol
+t_<2>\boldsymbol.\label
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров \(t_<1>\) и \(t_<2>\). Наоборот, какие бы числа мы ни подставили как значения \(t_<1>\) и \(t_<2>\), уравнение \eqref
Пусть \((x, y, z)\) и \((x_<0>, y_<0>, z_<0>)\) — координаты точек \(M\) и \(M_<0>\) соответственно, а векторы \(\boldsymbol
\) и \(\boldsymbol\) имеют компоненты \((p_<1>, p_<2>, p_<3>)\) и \((q_<1>, q_<2>, q_<3>)\). Тогда, раскладывая по базису обе части уравнения \eqref
$$
x-x_ <0>= t_<1>p_<1>+t_<2>q_<1>,\ y-y_ <0>= t_<1>p_<2>+t_<2>q_<2>,\ z-z_ <0>= t_<1>p_<3>+t_<2>q_<3>.\label
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра \(t\), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Поэтому мы можем сформулировать следующее утверждение.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой \(M_<0>(x_<0>, y_<0>)\) и направляющим вектором \(\boldsymbol(a_<1>, a_<2>)\) может быть записано в виде \eqref
Уравнение \eqref
Вектор с координатами \((-B, A)\) можно принять за направляющий вектор прямой с уравнением \eqref
Если система координат декартова прямоугольная, то вектор \(\boldsymbol
Действительно, в этом случае \((\boldsymbol, \boldsymbol
Пусть в уравнении прямой \(Ax+By+C = 0\) коэффициент \(B\) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,\label
$$
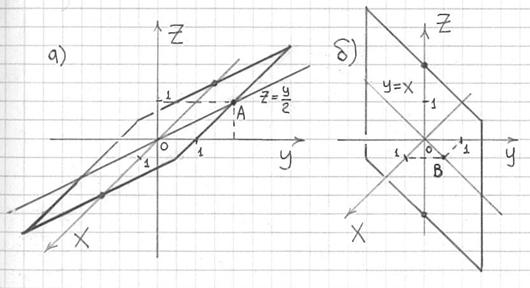
где \(k = -A/B\), а \(b = -C/B\). Мы видим, что к равно отношению компонент направляющего вектора: \(k = a_<2>/a_<1>\) (рис. 6.3).
 Рис. 6.3. k=-1. Прямая y=-x+1/2
Рис. 6.3. k=-1. Прямая y=-x+1/2
Отношение компонент направляющего вектора \(a_<2>/a_<1>\) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от \(\boldsymbol
 Рис. 6.4. \(k=\operatorname
Рис. 6.4. \(k=\operatorname
Положив \(x = 0\) в уравнении \eqref
Если же в уравнении прямой \(B = 0\) и ее уравнение нельзя представить в виде \eqref
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка \(M\) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки \(M_<0>\) компланарна направляющим векторам \(\boldsymbol
\) и \(\boldsymbol\). Эту компланарность можно выразить и равенством
$$
(\boldsymbol
, \boldsymbol) = 0.\label
$$
Вектор \(\boldsymbol
, \boldsymbol]\) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение \eqref
$$
(\boldsymbol
$$
Уравнения \eqref
$$
(\boldsymbol
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные \eqref
$$
(\boldsymbol
$$
Первое из них выражает тот факт, что вектор \(\boldsymbol
Пусть \(x, y, z\) — компоненты вектора \(\boldsymbol
Обратно, для любого линейного многочлена найдутся такие векторы \(\boldsymbol
Первая часть предложения очевидна: подставим разложение вектора \(\boldsymbol
$$
(x\boldsymbol
$$
раскроем скобки и получим многочлен \(Ax+By+Cz+D\), в котором \(D = -(\boldsymbol
$$
A = (\boldsymbol
$$
\(A\), \(B\) и \(C\) одновременно не равны нулю, так как ненулевой вектор \(\boldsymbol
Для доказательства обратного утверждения найдем сначала вектор \(\boldsymbol
$$
\boldsymbol
$$
Вектор \(\boldsymbol
Итак, мы нашли векторы \(\boldsymbol
$$
x(\boldsymbol
$$
который совпадает с требуемым \((\boldsymbol
Если система координат декартова прямоугольная, то вектор с компонентами \(A\), \(B\), \(C\) является нормальным вектором для плоскости с уравнением \(Ax+By+Cz+D = 0\).
Это сразу вытекает из формул \eqref
Любые два неколлинеарных вектора, удовлетворяющие уравнению \eqref
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Действительно, \(\alpha_<1>, \alpha_<2>\), должны быть пропорциональны компонентам — \(B\), \(A\) направляющего вектора прямой.
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B.\label
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения \eqref
$$
C_ <1>= \lambda C.\label
$$
Первая часть предложения прямо следует из того, что векторы с компонентами \((-B, A)\) и \((-B_<1>, A_<1>)\) — направляющие векторы прямых.
Докажем вторую часть. В равенствах \eqref
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид \(Ax+By+C = 0\) и \(\lambda(Ax+By)+C_ <1>= 0\) при некотором \(\lambda\). Если, кроме того, существует общая точка \(M_<0>(x_<0>, y_<0>)\) обеих прямых, то \(Ax_<0>+By_<0>+C = 0\) и \(\lambda(Ax_<0>+By_<0>)+C_ <1>= 0\). Вычитая одно равенство из другого, получаем \(C_ <1>= \lambda C\), как и требовалось.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0,\ A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B,\ C_ <1>= \lambda C.\label
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений \eqref
$$
D_ <1>= \lambda D.\label
$$
Если плоскости параллельны, то их нормальные векторы \(\boldsymbol
Условия \eqref
$$
\begin
A& B\\
A_<1>& B_<1>
\end
= 0,\label
$$
а условие параллельности плоскостей — в виде
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
= 0.\label
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
При условии \eqref
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от \(C\) и \(C_<1>\). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\nonumber
$$
то при любых \(C\) и \(C_<1>\) система имеет единственное решение \((x, y)\).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
\left\<\begin
Ax+By+Cz+D = 0,\\
A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0.
\end
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\label
$$
Разумеется, систему \eqref
Вспомним параметрические уравнения прямой \eqref
$$
t = \frac
$$
и мы получаем два равенства
$$
\frac
$$
или, в более симметричном виде,
$$
\frac
$$
Уравнения \eqref
Если обращается в нуль одна из компонент направляющего вектора, например, \(\alpha_<1>\), то уравнения прямой принимают вид
$$
x = x_<0>,\ \frac
$$
Эта прямая лежит в плоскости \(x = x_<0>\) и, следовательно, параллельна плоскости \(x = 0\). Аналогично пишутся уравнения прямой, если в нуль обращается не \(\alpha_<1>\), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, \(\alpha_<1>\) и \(\alpha_<2>\), то прямая имеет уравнения
$$
x = x_<0>,\ y = y_<0>.\label
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений \eqref
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя \(z\) на \(t\), получаем параметрические уравнения прямой
$$
x = \alpha_<1>t+\beta_<1>,\ y = \alpha_<2>t+\beta_<2>,\ z = t.\nonumber
$$
Первые две координаты начальной точки прямой \(M_<0>(\beta_<1>, \beta_<2>, 0)\) можно получить, решая систему \eqref
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты \((\alpha_<1>, \alpha_<2>, 1)\). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами \((A, B, C)\) и \(A_<1>, B_<1>, C_<1>\) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
$$
Вектор с компонентами \eqref
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого \((\alpha_<1>, \alpha_<2>, \alpha_<3>)\) удовлетворяют уравнению \(A\alpha_<1>+B\alpha_<2>+C\alpha_ <3>= 0\), параллелен плоскости с уравнением \(Ax+By+Cz+D = 0\). Если, кроме того, он удовлетворяет уравнению \(A_<1>\alpha_<1>+B_<1>\alpha_<2>+C_<1>\alpha_ <3>= 0\), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами \eqref
Основные поверхности пространства и их построение
Данная статья носит справочный характер и по своей структуре очень напоминает материалы о графиках и свойствах элементарных функций. С тем отличием, что вместо «плоских» графиков мы рассмотрим наиболее распространенные пространственные поверхности, а также научимся грамотно их строить от руки. Я довольно долго подбирал программные средства для построения трёхмерных чертежей и нашёл пару неплохих приложений, но, несмотря на всё удобство использования, эти программы плохо решают важный практический вопрос. Дело в том, что в обозримом историческом будущем студенты по-прежнему будут вооружены линейкой с карандашом, и, даже располагая качественным «машинным» чертежом, многие не смогут корректно перенести его на клетчатую бумагу. Поэтому в методичке особое внимание уделено технике ручного построения, и значительная часть иллюстраций страницы представляет собой handmade-продукт.
Чем отличается этот справочный материал от аналогов?
Обладая приличным практическим опытом, я очень хорошо знаю, с какими поверхностями чаще всего приходится иметь дело в реальных задачах высшей математики, и надеюсь, что эта статья поможет вам в кратчайшие сроки пополнить свой багаж соответствующими знаниями и прикладными навыками, которых в 90-95% случаев должно хватить.
Что нужно уметь на данный момент?
Во-первых, необходимо уметь правильно строить пространственную декартову систему координат (см. начало статьи Графики и свойства функций).
Во-вторых, необходимо уметь откладывать точки в этой системе координат; об этом я достаточно подробно рассказал на уроках Уравнениях прямой в пространстве и Треугольная пирамида.
Далее считаем, что все события происходят в прямоугольной системе координат.
Что вы приобретёте после прочтения этой статьи?
Бутылку После освоения материалов урока вы научитесь быстро определять тип поверхности по её функции и/или уравнению, представлять, как она расположена в пространстве, и, конечно же, выполнять чертежи. Ничего страшного, если не всё уложится в голове с 1-го прочтения – к любому параграфу по мере надобности всегда можно вернуться позже.
Информация по силам каждому – для её освоения не нужно каких-то сверхзнаний, особого художественного таланта и пространственного зрения.
На практике пространственная поверхность обычно задаётся функцией двух переменных  или уравнением вида
или уравнением вида  (константа правой части чаще всего равна нулю либо единице). Первое обозначение больше характерно для математического анализа, второе – для аналитической геометрии. Уравнение
(константа правой части чаще всего равна нулю либо единице). Первое обозначение больше характерно для математического анализа, второе – для аналитической геометрии. Уравнение  , по существу, является неявно заданной функцией 2 переменных, которую в типовых случаях легко привести к виду
, по существу, является неявно заданной функцией 2 переменных, которую в типовых случаях легко привести к виду  . Напоминаю простейший пример c первого урока по теме ФНП:
. Напоминаю простейший пример c первого урока по теме ФНП:
 – уравнение плоскости вида
– уравнение плоскости вида  .
.
 – функция плоскости в явном виде
– функция плоскости в явном виде  .
.
Давайте с неё и начнём:
Распространенные уравнения плоскостей
Типовые варианты расположения плоскостей в прямоугольной системе координат детально рассмотрены в самом начале статьи Уравнение плоскости. Тем не менее, ещё раз остановимся на уравнениях, которые имеют огромное значение для практики.
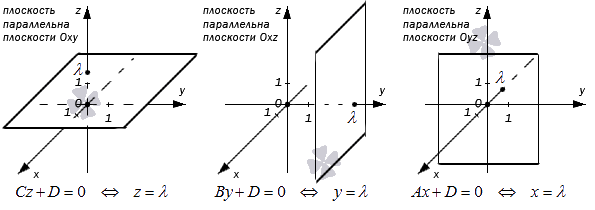
Прежде всего, вы должны на полном автомате узнавать уравнения плоскостей, которые параллельны координатным плоскостям  . Фрагменты плоскостей стандартно изображают прямоугольниками, которые в последних двух случаях выглядят, как параллелограммы. По умолчанию размеры можно выбрать любые (в разумных пределах, конечно), при этом желательно, чтобы точка, в которой координатная ось «протыкает» плоскость являлась центром симметрии:
. Фрагменты плоскостей стандартно изображают прямоугольниками, которые в последних двух случаях выглядят, как параллелограммы. По умолчанию размеры можно выбрать любые (в разумных пределах, конечно), при этом желательно, чтобы точка, в которой координатная ось «протыкает» плоскость являлась центром симметрии: 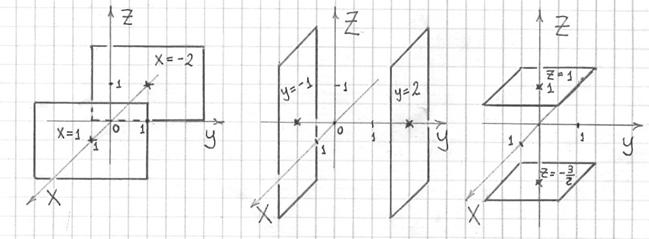
Строго говоря, координатные оси местами следовало изобразить пунктиром, но во избежание путаницы будем пренебрегать данным нюансом.
Тем, кто ещё не успел, настоятельно рекомендую ознакомиться с указанной выше статьёй и понять неформальный смысл этих уравнений. Повторим заодно и соответствующие неравенства:
– (левый чертёж) неравенство  задаёт дальнее от нас полупространство, исключая саму плоскость
задаёт дальнее от нас полупространство, исключая саму плоскость  ;
;
– (средний чертёж) неравенство  задаёт правое полупространство, включая плоскость
задаёт правое полупространство, включая плоскость  ;
;
– (правый чертёж) двойное неравенство  задаёт «слой», расположенный между плоскостями
задаёт «слой», расположенный между плоскостями  , включая обе плоскости.
, включая обе плоскости.
Для самостоятельной разминки:
Изобразить тело, ограниченное плоскостями 
Составить систему неравенств, определяющих данное тело.
Из-под грифеля вашего карандаша должен выйти старый знакомый прямоугольный параллелепипед. Не забывайте, что невидимые рёбра и грани нужно прочертить пунктиром. Готовый чертёж в конце урока.
Пожалуйста, НЕ ПРЕНЕБРЕГАЙТЕ учебными задачами, даже если они кажутся слишком простыми. А то может статься, раз пропустили, два пропустили, а затем потратили битый час, вымучивая трёхмерный чертёж в каком-нибудь реальном примере. Кроме того, механическая работа поможет гораздо эффективнее усвоить материал и развить интеллект! Не случайно в детском саду и начальной школе детей загружают рисованием, лепкой, конструкторами и другими заданиями на мелкую моторику пальцев. Простите за отступление, не пропадать же двум моим тетрадям по возрастной психологии =)
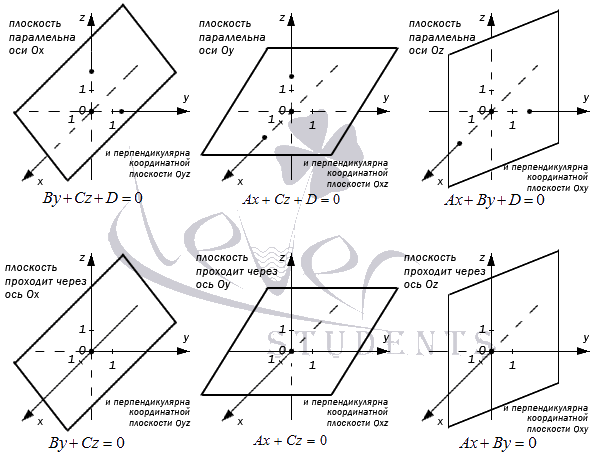
Следующую группу плоскостей условно назовём «прямыми пропорциональностями» – это плоскости, проходящие через координатные оси:
1) уравнение вида  (здесь и далее
(здесь и далее  ) задаёт плоскость, проходящую через ось
) задаёт плоскость, проходящую через ось  ;
;
2) уравнение вида  задаёт плоскость, проходящую через ось
задаёт плоскость, проходящую через ось  ;
;
3) уравнение вида  задаёт плоскость, проходящую через ось
задаёт плоскость, проходящую через ось  .
.
Хотя формальный признак очевиден (какая переменная отсутствует в уравнении – через ту ось и проходит плоскость), всегда полезно понимать суть происходящих событий:
Построить плоскость 
Как лучше осуществить построение? Предлагаю следующий алгоритм:
Сначала перепишем уравнение в виде  , из которого хорошо видно, что «игрек» может принимать любые значения. Зафиксируем значение
, из которого хорошо видно, что «игрек» может принимать любые значения. Зафиксируем значение  , то есть, будем рассматривать координатную плоскость
, то есть, будем рассматривать координатную плоскость  . Уравнения
. Уравнения  задают пространственную прямую, лежащую в данной координатной плоскости. Изобразим эту линию на чертеже. Прямая проходит через начало координат, поэтому для её построения достаточно найти одну точку. Пусть
задают пространственную прямую, лежащую в данной координатной плоскости. Изобразим эту линию на чертеже. Прямая проходит через начало координат, поэтому для её построения достаточно найти одну точку. Пусть  . Откладываем точку
. Откладываем точку  и проводим прямую.
и проводим прямую.
Теперь возвращаемся к уравнению плоскости  . Поскольку «игрек» принимает любые значения, то построенная в плоскости
. Поскольку «игрек» принимает любые значения, то построенная в плоскости  прямая непрерывно «тиражируется» влево и вправо. Именно так и образуется наша плоскость
прямая непрерывно «тиражируется» влево и вправо. Именно так и образуется наша плоскость  , проходящая через ось
, проходящая через ось  . Чтобы завершить чертёж, слева и справа от прямой
. Чтобы завершить чертёж, слева и справа от прямой  откладываем две параллельные линии и поперечными горизонтальными отрезками «замыкаем» символический параллелограмм:
откладываем две параллельные линии и поперечными горизонтальными отрезками «замыкаем» символический параллелограмм: 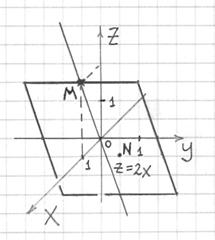
Так как условие не накладывало дополнительных ограничений, то фрагмент плоскости можно было изобразить чуть меньших или чуть бОльших размеров.
Ещё раз повторим смысл пространственного линейного неравенства на примере  . Как определить полупространство, которое оно задаёт? Берём какую-нибудь точку, не принадлежащую плоскости
. Как определить полупространство, которое оно задаёт? Берём какую-нибудь точку, не принадлежащую плоскости  , например, точку
, например, точку  из ближнего к нам полупространства и подставляем её координаты в неравенство:
из ближнего к нам полупространства и подставляем её координаты в неравенство: 
Получено верное неравенство, значит, неравенство  задаёт нижнее (относительно плоскости
задаёт нижнее (относительно плоскости  ) полупространство, при этом сама плоскость не входит в решение.
) полупространство, при этом сама плоскость не входит в решение.
Построить плоскости
а)  ;
;
б)  .
.
Это задания для самостоятельного построения, в случае затруднений используйте аналогичные рассуждения. Краткие указания и чертежи в конце урока.
На практике особенно распространены плоскости, параллельные оси  . Частный случай, когда плоскость проходит через ось, только что был в пункте «бэ», и сейчас мы разберём более общую задачу:
. Частный случай, когда плоскость проходит через ось, только что был в пункте «бэ», и сейчас мы разберём более общую задачу:
Построить плоскость 
Решение: в уравнение в явном виде не участвует переменная «зет», а значит, плоскость параллельна оси аппликат. Применим ту же технику, что и в предыдущих примерах.
Перепишем уравнение плоскости в виде  из которого понятно, что «зет» может принимать любые значения. Зафиксируем
из которого понятно, что «зет» может принимать любые значения. Зафиксируем  и в «родной» плоскости
и в «родной» плоскости  начертим обычную «плоскую» прямую
начертим обычную «плоскую» прямую  . Для её построения удобно взять опорные точки
. Для её построения удобно взять опорные точки  .
.
Поскольку «зет» принимает все значения, то построенная прямая непрерывно «размножается» вверх и вниз, образуя тем самым искомую плоскость  . Аккуратно оформляем параллелограмм разумной величины:
. Аккуратно оформляем параллелограмм разумной величины: 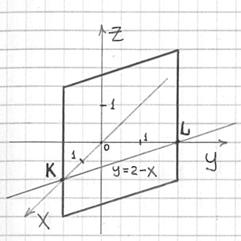
Готово.
Уравнение плоскости в отрезках
Важнейшая прикладная разновидность. Если все коэффициенты общего уравнения плоскости  отличны от нуля, то оно представимо в виде
отличны от нуля, то оно представимо в виде  , который называется уравнением плоскости в отрезках. Очевидно, что плоскость пересекает координатные оси в точках
, который называется уравнением плоскости в отрезках. Очевидно, что плоскость пересекает координатные оси в точках  , и большое преимущество такого уравнения состоит в лёгкости построения чертежа:
, и большое преимущество такого уравнения состоит в лёгкости построения чертежа:
Построить плоскость 
Решение: сначала составим уравнение плоскости в отрезках. Перебросим свободный член направо и разделим обе части на 12: 
Делаем дроби трёхэтажными: 
Именно так! – ведь знаменатели могут оказаться и дробными. Но в данном случае всё разделилось нацело: 
Таким образом, плоскость проходит через точки  . В целях самоконтроля координаты каждой точки устно подставим в исходное уравнение
. В целях самоконтроля координаты каждой точки устно подставим в исходное уравнение  . После чего выполним чертёж:
. После чего выполним чертёж: 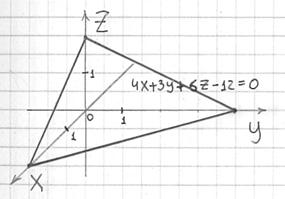
В отличие от предыдущих примеров здесь фрагмент плоскости изображается в виде треугольника, который в общем случае может «прорисоваться» в любом из восьми октантов.
Задание для тренировки:
Построить плоскость 
Краткое решение и чертёж в конце урока.
Переходим к другой обширной группе обитателей 3D-мира:
Цилиндрические поверхности
Или, если короче – цилиндры.
! Примечание: в ряде источников информации под цилиндром понимается исключительно геометрическое тело, а не поверхность!
Следует отметить, что в математике под этими терминами скрывается не совсем то, что обычно подразумевает обыватель, и класс цилиндрических поверхностей не ограничивается чёрным цилиндром на голове:
Построить поверхность, заданную уравнением 
…что за дела? Не опечатка ли здесь? Вроде как дано каноническое уравнение эллипса…
Нет, здесь не опечатка и все дела происходят именно в пространстве! Исследуем предложенную поверхность тем же методом, что недавно использовали для плоскостей. Перепишем уравнение в виде  , из которого следует, что «зет» принимает любые значения. Зафиксируем
, из которого следует, что «зет» принимает любые значения. Зафиксируем  и построим в плоскости
и построим в плоскости  эллипс
эллипс  . Так как «зет» принимает все значения, то построенный эллипс непрерывно «тиражируется» вверх и вниз. Легко понять, что поверхность бесконечна:
. Так как «зет» принимает все значения, то построенный эллипс непрерывно «тиражируется» вверх и вниз. Легко понять, что поверхность бесконечна: 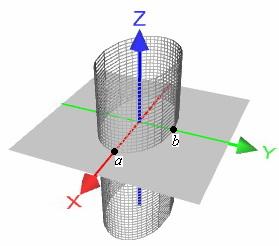
Данная поверхность называется эллиптическим цилиндром. Эллипс  (на любой высоте) называется направляющей цилиндра, а параллельные прямые, проходящие через каждую точку эллипса называются образующими цилиндра (которые в прямом смысле слова его и образуют). Ось
(на любой высоте) называется направляющей цилиндра, а параллельные прямые, проходящие через каждую точку эллипса называются образующими цилиндра (которые в прямом смысле слова его и образуют). Ось  является осью симметрии поверхности (но не её частью!).
является осью симметрии поверхности (но не её частью!).
Координаты любой точки, принадлежащей данной поверхности, обязательно удовлетворяют уравнению  .
.
Пространственное неравенство  задаёт «внутренность» бесконечной «трубы», включая саму цилиндрическую поверхность, и, соответственно, противоположное неравенство
задаёт «внутренность» бесконечной «трубы», включая саму цилиндрическую поверхность, и, соответственно, противоположное неравенство  определяет множество точек вне цилиндра.
определяет множество точек вне цилиндра.
В практических задачах наиболее популярен частный случай, когда направляющей цилиндра является окружность:
Построить поверхность, заданную уравнением 
Бесконечную «трубу» изобразить невозможно, поэтому художества ограничиваются, как правило, «обрезком».
Сначала удобно построить окружность радиуса  в плоскости
в плоскости  , а затем ещё пару окружностей сверху и снизу. Полученные окружности (направляющие цилиндра) аккуратно соединяем четырьмя параллельными прямыми (образующими цилиндра):
, а затем ещё пару окружностей сверху и снизу. Полученные окружности (направляющие цилиндра) аккуратно соединяем четырьмя параллельными прямыми (образующими цилиндра): 
Не забываем использовать пунктир для невидимых нам линий.
Координаты любой точки, принадлежащей данному цилиндру, удовлетворяют уравнению  . Координаты любой точки, лежащей строго внутри «трубы», удовлетворяют неравенству
. Координаты любой точки, лежащей строго внутри «трубы», удовлетворяют неравенству  , а неравенство
, а неравенство  задаёт множество точек внешней части. Для лучшего понимания рекомендую рассмотреть несколько конкретных точек пространства и убедиться в этом самостоятельно.
задаёт множество точек внешней части. Для лучшего понимания рекомендую рассмотреть несколько конкретных точек пространства и убедиться в этом самостоятельно.
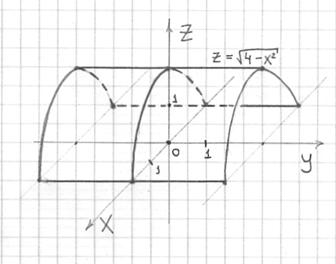
Построить поверхность  и найти её проекцию на плоскость
и найти её проекцию на плоскость 
Перепишем уравнение в виде  из которого следует, что «икс» принимает любые значения. Зафиксируем
из которого следует, что «икс» принимает любые значения. Зафиксируем  и в плоскости
и в плоскости  изобразим окружность
изобразим окружность  – с центром в начале координат, единичного радиуса. Так как «икс» непрерывно принимает все значения, то построенная окружность порождает круглый цилиндр с осью симметрии
– с центром в начале координат, единичного радиуса. Так как «икс» непрерывно принимает все значения, то построенная окружность порождает круглый цилиндр с осью симметрии  . Рисуем ещё одну окружность (направляющую цилиндра) и аккуратно соединяем их прямыми (образующими цилиндра). Местами получились накладки, но что делать, такой уж наклон:
. Рисуем ещё одну окружность (направляющую цилиндра) и аккуратно соединяем их прямыми (образующими цилиндра). Местами получились накладки, но что делать, такой уж наклон: 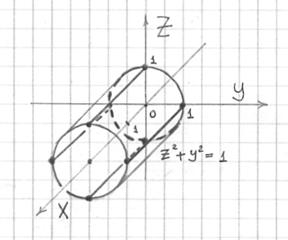
На этот раз я ограничился кусочком цилиндра на промежутке  и это не случайно. На практике зачастую и требуется изобразить лишь небольшой фрагмент поверхности.
и это не случайно. На практике зачастую и требуется изобразить лишь небольшой фрагмент поверхности.
Тут, к слову, получилось 6 образующих – две дополнительные прямые «закрывают» поверхность с левого верхнего и правого нижнего углов.
Теперь разбираемся с проекцией цилиндра на плоскость  . Многие читатели понимают, что такое проекция, но, тем не менее, проведём очередную физкульт-пятиминутку. Пожалуйста, встаньте и склоните голову над чертежом так, чтобы остриё оси
. Многие читатели понимают, что такое проекция, но, тем не менее, проведём очередную физкульт-пятиминутку. Пожалуйста, встаньте и склоните голову над чертежом так, чтобы остриё оси  смотрело перпендикулярно вам в лоб. То, чем с этого ракурса кажется цилиндр – и есть его проекция на плоскость
смотрело перпендикулярно вам в лоб. То, чем с этого ракурса кажется цилиндр – и есть его проекция на плоскость  . А кажется он бесконечной полосой, заключенным между прямыми
. А кажется он бесконечной полосой, заключенным между прямыми  , включая сами прямые. Данная проекция – это в точности область определения функций
, включая сами прямые. Данная проекция – это в точности область определения функций  (верхний «жёлоб» цилиндра),
(верхний «жёлоб» цилиндра),  (нижний «жёлоб»).
(нижний «жёлоб»).
Давайте, кстати, проясним ситуацию и с проекциями на другие координатные плоскости. Пусть лучи солнца светят на цилиндр со стороны острия и вдоль оси  . Тенью (проекцией) цилиндра на плоскость
. Тенью (проекцией) цилиндра на плоскость  является аналогичная бесконечная полоса – часть плоскости
является аналогичная бесконечная полоса – часть плоскости  , ограниченная прямыми
, ограниченная прямыми  (
(  – любое), включая сами прямые.
– любое), включая сами прямые.
А вот проекция на плоскость  несколько иная. Если смотреть на цилиндр из острия оси
несколько иная. Если смотреть на цилиндр из острия оси  , то он спроецируется в окружность единичного радиуса
, то он спроецируется в окружность единичного радиуса  , с которой мы начинали построение.
, с которой мы начинали построение.
Построить поверхность  и найти её проекции на координатные плоскости
и найти её проекции на координатные плоскости
Это задача для самостоятельного решения. Если условие не очень понятно, возведите обе части в квадрат и проанализируйте результат; выясните, какую именно часть цилиндра задаёт функция  . Используйте методику построения, неоднократно применявшуюся выше. Краткое решение, чертёж и комментарии в конце урока.
. Используйте методику построения, неоднократно применявшуюся выше. Краткое решение, чертёж и комментарии в конце урока.
Эллиптические и другие цилиндрические поверхности могут быть смещены относительно координатных осей, например:
 (по знакомым мотивам статьи о линиях 2-го порядка) – цилиндр единичного радиуса с линией симметрии, проходящей через точку
(по знакомым мотивам статьи о линиях 2-го порядка) – цилиндр единичного радиуса с линией симметрии, проходящей через точку  параллельно оси
параллельно оси  . Однако на практике подобные цилиндры попадаются довольно редко, и совсем уж невероятно встретить «косую» относительно координатных осей цилиндрическую поверхность.
. Однако на практике подобные цилиндры попадаются довольно редко, и совсем уж невероятно встретить «косую» относительно координатных осей цилиндрическую поверхность.
Параболические цилиндры
Как следует из названия, направляющей такого цилиндра является парабола.
Построить поверхность  и найти её проекции на координатные плоскости.
и найти её проекции на координатные плоскости.
Не мог удержаться от этого примера =)
Решение: идём проторенной тропой. Перепишем уравнение в виде  , из которого следует, что «зет» может принимать любые значения. Зафиксируем
, из которого следует, что «зет» может принимать любые значения. Зафиксируем  и построим обычную параболу
и построим обычную параболу  на плоскости
на плоскости  , предварительно отметив тривиальные опорные точки
, предварительно отметив тривиальные опорные точки  . Поскольку «зет» принимает все значения, то построенная парабола непрерывно «тиражируется» вверх и вниз до бесконечности. Откладываем такую же параболу, скажем, на высоте (в плоскости)
. Поскольку «зет» принимает все значения, то построенная парабола непрерывно «тиражируется» вверх и вниз до бесконечности. Откладываем такую же параболу, скажем, на высоте (в плоскости)  и аккуратно соединяем их параллельными прямыми (образующими цилиндра):
и аккуратно соединяем их параллельными прямыми (образующими цилиндра): 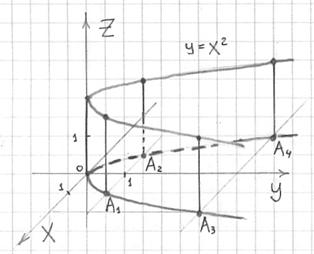
Напоминаю полезный технический приём: если изначально нет уверенности в качестве чертежа, то линии сначала лучше прочертить тонко-тонко карандашом. Затем оцениваем качество эскиза, выясняем участки, где поверхность скрыта от наших глаз, и только потом придаём нажим грифелю.
1) Проекцией цилиндра на плоскость  является парабола
является парабола  . Следует отметить, что в данном случае нельзя рассуждать об области определения функции двух переменных – по той причине, что уравнение цилиндра
. Следует отметить, что в данном случае нельзя рассуждать об области определения функции двух переменных – по той причине, что уравнение цилиндра  не приводимо к функциональному виду
не приводимо к функциональному виду  .
.
2) Проекция цилиндра на плоскость  представляет собой полуплоскость
представляет собой полуплоскость  , включая ось
, включая ось 
3) И, наконец, проекцией цилиндра на плоскость  является вся плоскость
является вся плоскость  .
.
Построить параболические цилиндры:
а)  , ограничиться фрагментом поверхности в ближнем полупространстве;
, ограничиться фрагментом поверхности в ближнем полупространстве;
б)  на промежутке
на промежутке 
В случае затруднений не спешим и рассуждаем по аналогии с предыдущими примерами, благо, технология досконально отработана. Не критично, если поверхности будут получаться немного корявыми – важно правильно отобразить принципиальную картину. Я и сам особо не заморачиваюсь над красотой линий, если получился сносный чертёж «на троечку», обычно не переделываю. В образце решения, кстати, использован ещё один приём, позволяющий улучшить качество чертежа 😉
Гиперболические цилиндры
Направляющими таких цилиндров являются гиперболы. Этот тип поверхностей, по моим наблюдениям, встречается значительно реже, чем предыдущие виды, поэтому я ограничусь единственным схематическим чертежом гиперболического цилиндра  :
: 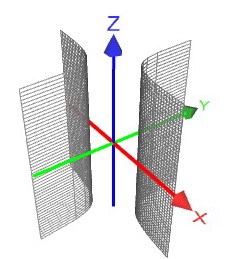
Принцип рассуждения здесь точно такой же – обычная школьная гипербола  из плоскости
из плоскости  непрерывно «размножается» вверх и вниз до бесконечности.
непрерывно «размножается» вверх и вниз до бесконечности.
Рассмотренные цилиндры относятся к так называемым поверхностям 2-го порядка, и сейчас мы продолжим знакомиться с другими представителями этой группы:
Эллипсоид. Сфера и шар
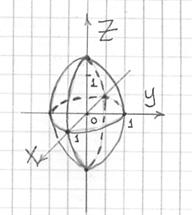
Каноническое уравнение эллипсоида в прямоугольной системе координат имеет вид  , где
, где  – положительные числа (полуоси эллипсоида), которые в общем случае различны. Эллипсоидом называют как поверхность, так и тело, ограниченное данной поверхностью. Тело, как многие догадались, задаётся неравенством
– положительные числа (полуоси эллипсоида), которые в общем случае различны. Эллипсоидом называют как поверхность, так и тело, ограниченное данной поверхностью. Тело, как многие догадались, задаётся неравенством  и координаты любой внутренней точки (а также любой точки поверхности) обязательно удовлетворяют этому неравенству. Конструкция симметрична относительно координатных осей и координатных плоскостей:
и координаты любой внутренней точки (а также любой точки поверхности) обязательно удовлетворяют этому неравенству. Конструкция симметрична относительно координатных осей и координатных плоскостей: 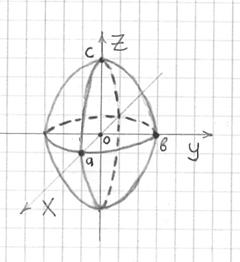
Происхождение термина «эллипсоид» тоже очевидно: если поверхность «разрезать» координатными плоскостями, то в сечениях получатся три различных (в общем случае) эллипса. В зависимости от значений  эллипсоид может быть вытянут вдоль любой оси, причём вытянут достаточно далеко.
эллипсоид может быть вытянут вдоль любой оси, причём вытянут достаточно далеко.
Если две полуоси совпадают, то данную поверхность/тело называют эллипсоидом вращения. Так, например, эллипсоид  получен вращением эллипса
получен вращением эллипса  вокруг оси
вокруг оси  (представьте мысленно).
(представьте мысленно).
Небольшая задачка для самостоятельного решения:
Построить эллипсоид  . Записать уравнение порождающего эллипса и ось, вокруг которой осуществляется его вращение.
. Записать уравнение порождающего эллипса и ось, вокруг которой осуществляется его вращение.
Чертёж и краткий комментарий в конце урока.
В случае равенства всех полуосей  , эллипсоид вырождается в сферу:
, эллипсоид вырождается в сферу:
 – данное уравнение задаёт сферу с центром в начале координат радиуса
– данное уравнение задаёт сферу с центром в начале координат радиуса  .
.
Тело, ограниченное сферой, называется шаром. Неравенство  определяет шар с центром в начале координат радиуса
определяет шар с центром в начале координат радиуса  . И, соответственно, противоположному условию
. И, соответственно, противоположному условию  удовлетворяют координаты любой внешней точки.
удовлетворяют координаты любой внешней точки.
Разделаемся с аппетитным Колобком:
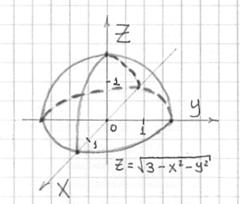
Построить поверхность  . Найти функции, задающие верхнюю и нижнюю полусферу, указать их области определения. Записать аналитическое выражение шара, ограниченного данной сферой и проверить, принадлежат ли ему точки
. Найти функции, задающие верхнюю и нижнюю полусферу, указать их области определения. Записать аналитическое выражение шара, ограниченного данной сферой и проверить, принадлежат ли ему точки 
Решение: уравнение  задаёт сферу с центром в начале координат радиуса 2. Здесь, как и в примерах с параболическими цилиндрами, выгодно уменьшить масштаб чертежа:
задаёт сферу с центром в начале координат радиуса 2. Здесь, как и в примерах с параболическими цилиндрами, выгодно уменьшить масштаб чертежа: 
Выразим «зет»: 
 – функция, задающая верхнюю полусферу;
– функция, задающая верхнюю полусферу;
 – функция, задающая нижнюю полусферу.
– функция, задающая нижнюю полусферу.
Областью определения каждой функции является круг  с центром в начале координат радиуса 2 (проекция полусфер на плоскость
с центром в начале координат радиуса 2 (проекция полусфер на плоскость  ).
).
Неравенство  определяет шар с центром в начале координат радиуса 2. Подставим координаты точек
определяет шар с центром в начале координат радиуса 2. Подставим координаты точек  в данное неравенство:
в данное неравенство:
1) 
Получено неверное неравенство, следовательно, точка «дэ» лежит вне шара.
2) 
Получено верное неравенство, значит, точка «эф» принадлежит шару, а конкретнее – его границе (сфере).
Материал о сферах и шарах достаточно прост, и я предлагаю вам чисто символическое задание для самостоятельного решения:
Найти область определения функции двух переменных  и построить соответствующую поверхность.
и построить соответствующую поверхность.
Краткое решение и чертёж в конце урока.
Кстати, наша планета, кто не знает, чуть-чуть, но таки не шар.
Коническая поверхность
Каноническое уравнение  в декартовых координатах задаёт коническую поверхность 2-го порядка или, если короче, конус. Но это опять же не совсем тот конический колпак, который всем знаком со времён далёкого детства.
в декартовых координатах задаёт коническую поверхность 2-го порядка или, если короче, конус. Но это опять же не совсем тот конический колпак, который всем знаком со времён далёкого детства.
Форму многих поверхностей удобно исследовать методом сечений, который я потихоньку начал использовать ещё в предыдущих параграфах. Суть метода состоит в том, что мы «рассекаем пациентов» плоскостями (прежде всего, координатными), и получившиеся сечения позволяют нам хорошо понять, как выглядит та или иная поверхность.
Перепишем уравнение в виде  и исследуем сечения конуса плоскостями
и исследуем сечения конуса плоскостями  , параллельными плоскости
, параллельными плоскости  . Подставим
. Подставим  в уравнение конической поверхности:
в уравнение конической поверхности: 
Очевидно, что случаю  соответствует уравнение
соответствует уравнение  , задающее пару мнимых пересекающихся прямых с единственной действительной точкой пересечения в начале координат. Данная точка называется вершиной конуса.
, задающее пару мнимых пересекающихся прямых с единственной действительной точкой пересечения в начале координат. Данная точка называется вершиной конуса.
Если же  , то уравнение
, то уравнение  задаёт эллипсы различных размеров, причём из последнего уравнения хорошо видно, что с увеличением абсолютных значений «цэ большого» полуоси эллипсов неограниченно возрастают. Таким образом, коническая поверхность бесконечна:
задаёт эллипсы различных размеров, причём из последнего уравнения хорошо видно, что с увеличением абсолютных значений «цэ большого» полуоси эллипсов неограниченно возрастают. Таким образом, коническая поверхность бесконечна: 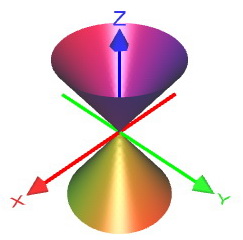
Если коническую поверхность «разрезать» произвольной плоскостью  (которая проходит через ось
(которая проходит через ось  ), то в сечении получатся две пересекающиеся в начале координат прямые. Множество таких сечений, собственно, и образует коническую поверхность.
), то в сечении получатся две пересекающиеся в начале координат прямые. Множество таких сечений, собственно, и образует коническую поверхность.
И логично, что каждая из этих прямых называется образующей конуса.
На практике почти всегда приходится иметь дело с конусом вращения, в котором сечения плоскостями  представляют собой окружности. И во многих практических задачах типичен следующий «опознавательный» вид уравнения:
представляют собой окружности. И во многих практических задачах типичен следующий «опознавательный» вид уравнения:
 – с «зет» в левой части и равными коэффициентами при
– с «зет» в левой части и равными коэффициентами при  и
и  .
.
Как многие догадались, функция  задаёт верхнюю часть конуса, а функция
задаёт верхнюю часть конуса, а функция  – его нижнюю часть.
– его нижнюю часть.
Распространённая вариация по теме:
Построить поверхность 
Решение: уравнение имеет вид  и определяет половину конуса, располагающуюся в верхнем полупространстве. Вершина конической поверхности, понятно, расположена в начале координат, но как построить всё остальное?
и определяет половину конуса, располагающуюся в верхнем полупространстве. Вершина конической поверхности, понятно, расположена в начале координат, но как построить всё остальное?
Возведём обе части исходного уравнения в квадрат: 
Далее выберем небольшое положительное значение «зет», например  , и найдём линию пересечения этой плоскости с нашей поверхностью:
, и найдём линию пересечения этой плоскости с нашей поверхностью:
 – окружность радиуса
– окружность радиуса  .
.
Пояснение на всякий случай:  подставили в 1-е уравнение
подставили в 1-е уравнение
Теперь на высоте  изобразим окружность
изобразим окружность  и аккуратно проведём 4 образующие конуса:
и аккуратно проведём 4 образующие конуса: 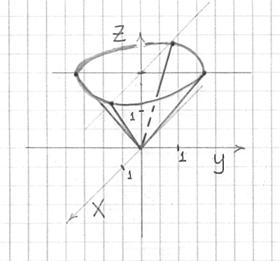
Образующие, в принципе, можно было продолжить и выше плоскости  .
.
Не забываем, что уравнение  задаёт только верхнюю часть поверхности и поэтому никаких «хвостиков» в нижнем полупространстве быть не должно.
задаёт только верхнюю часть поверхности и поэтому никаких «хвостиков» в нижнем полупространстве быть не должно.
Пожалуй, простейшая коническая поверхность:
Построить коническую поверхность  . Записать неравенства, определяющие внутреннюю и внешнюю часть конуса.
. Записать неравенства, определяющие внутреннюю и внешнюю часть конуса.
В образце решения изображён фрагмент конуса, расположенный между плоскостями  . Ну, а с неравенствами, думаю, сообразите самостоятельно. В случае мучительных сомнений всегда можно взять точку (внутри или снаружи конуса) и проверить, удовлетворяют ли её координаты неравенству.
. Ну, а с неравенствами, думаю, сообразите самостоятельно. В случае мучительных сомнений всегда можно взять точку (внутри или снаружи конуса) и проверить, удовлетворяют ли её координаты неравенству.
В заключение статьи подробно рассмотрим ещё одну мегапопулярную поверхность:
Эллиптический параболоид
Каноничный эллиптический параболоид в прямоугольной системе задаётся уравнением  . Данная поверхность выглядит бесконечной чашей:
. Данная поверхность выглядит бесконечной чашей: 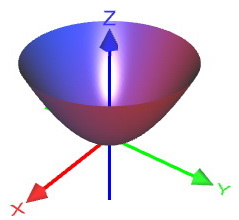
Название «эллиптический параболоид» тоже произошло из результатов исследования сечений. В горизонтальных сечениях плоскостями  получаются различные эллипсы:
получаются различные эллипсы:  , в частности, при
, в частности, при  эллипс вырождается в точку (начало координат), которая называется вершиной эллиптического параболоида.
эллипс вырождается в точку (начало координат), которая называется вершиной эллиптического параболоида.
А вертикальные сечения плоскостями, параллельными оси  , представляют собой различные параболы. Например, сечение координатной плоскостью
, представляют собой различные параболы. Например, сечение координатной плоскостью  :
:
 – парабола, лежащая в плоскости
– парабола, лежащая в плоскости  .
.
Или сечение плоскостью  :
:
 – парабола, лежащая в плоскости
– парабола, лежащая в плоскости  .
.
Отсюда и эллиптический параболоид.
На практике обычно встречается упрощенная версия поверхности с горизонтальными сечениями-окружностями. Перепишем каноническое уравнение в прикладном функциональном виде:
 – характерным признаком функции, как и в ситуации с конусом, является равенство коэффициентов при
– характерным признаком функции, как и в ситуации с конусом, является равенство коэффициентов при  .
.
Построить поверхность  . Записать неравенства, определяющие внутреннюю и внешнюю часть эллиптического параболоида.
. Записать неравенства, определяющие внутреннюю и внешнюю часть эллиптического параболоида.
Решение: используем ту же методику, что и при построении конической поверхности. Рассмотрим какое-нибудь не очень большое значение «зет», здесь удобно выбрать  , и найдём сечение эллиптического параболоида этой плоскостью:
, и найдём сечение эллиптического параболоида этой плоскостью:
 – окружность радиуса 2.
– окружность радиуса 2.
Теперь на высоте  изобразим данную окружность и аккуратно соединим её с вершиной (началом координат) двумя параболами. В результате получится такая вот симпатичная чашка:
изобразим данную окружность и аккуратно соединим её с вершиной (началом координат) двумя параболами. В результате получится такая вот симпатичная чашка: 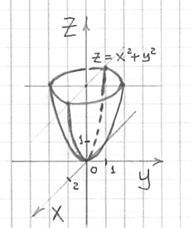
Рассматриваемый частный случай параболоида с горизонтальными сечениями-окружностями также называют параболоидом вращения, поскольку его можно получить вращением параболы вокруг оси 
С неравенствами ничего нового. Нетрудно догадаться, что неравенство  или, если развернуть запись в более привычном порядке,
или, если развернуть запись в более привычном порядке,  определяет множество точек внутри чаши (т.к. неравенство строгое, то сама поверхность не входит в решение). И, соответственно, неравенство
определяет множество точек внутри чаши (т.к. неравенство строгое, то сама поверхность не входит в решение). И, соответственно, неравенство  задаёт множество внешних точек.
задаёт множество внешних точек.
По моим наблюдениям, на практике часто встречается эллиптический параболоид вида  , который выглядит точно так же, но мигрировал вершиной в точку
, который выглядит точно так же, но мигрировал вершиной в точку  . Именно такую поверхность мы исследовали с помощью линий уровня в Примере № 14 первого урока темы.
. Именно такую поверхность мы исследовали с помощью линий уровня в Примере № 14 первого урока темы.
Ещё одно типичное расположение эллиптического параболоида:
Построить поверхность 
Решение: если коэффициенты при  отрицательны (сразу оба), то чаша параболоида «смотрит вниз». Вершина поверхности расположена в точке
отрицательны (сразу оба), то чаша параболоида «смотрит вниз». Вершина поверхности расположена в точке  . Это понятно не только интуитивно, но и подкрепляется простым аналитическим рассуждением: очевидно, что рассмотрев любую другую пару значений
. Это понятно не только интуитивно, но и подкрепляется простым аналитическим рассуждением: очевидно, что рассмотрев любую другую пару значений  мы уменьшим функцию
мы уменьшим функцию  . Таким образом, в точке
. Таким образом, в точке  достигается максимум функции двух переменных.
достигается максимум функции двух переменных.
В целях построения поверхность удобно «отсечь» плоскостью  . Сечение представляет собой:
. Сечение представляет собой:
 – окружность радиуса 2.
– окружность радиуса 2.
Выполним чертёж: 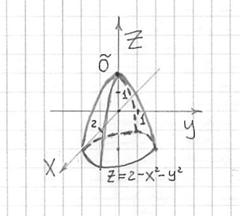
Готово.
Заключительное задание для самостоятельного решения:
Построить эллиптический параболоид 
Чертёж в конце урока, который приблизился к своему завершению.
Среди поверхностей 2-го порядка за кадром остались редко встречающиеся на практике:
( ниже перечислены канонические уравнения, в которых  – положительные числа)
– положительные числа)
 – гиперболический параболоид («седло»);
– гиперболический параболоид («седло»);
 – однополостной гиперболоид;
– однополостной гиперболоид;
 – двуполостной гиперболоид.
– двуполостной гиперболоид.
Более подробную информацию об этих поверхностях можно почерпнуть в учебнике аналитической геометрии либо другом источнике информации, в частности, в Википедии, на которую проставлены ссылки. Если возникнет необходимость выполнить их построение – используйте метод сечений, он действительно прост и эффективен!
Я бы с радостью всё рассказал, но, во-первых, это нецелесообразно с практической точки зрения, а во-вторых, размер статьи подходит к той опасной грани, после которой посетители сайта будут считать автора не только фанатом, но и начнут всерьёз опасаться за его здоровье. Впрочем, санитары разрешили мне ещё немного посидеть за компьютером =)
А если серьёзно, то этой статьи я опасался чуть ли не с первых дней создания сайта ввиду большого объема работы. Но вот, наконец, клуб любителей функций двух переменных широко распахнул двери, и теперь-то уж мы с вами оттянемся в полный рост =)
Решения и чертежи:
Пример 1: Решение: выполним чертёж: 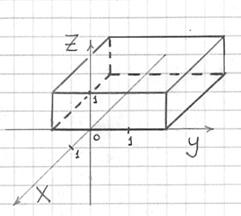
Данное тело определяется системой 
Пример 3: Решение: а) Сначала удобно построить прямую  , лежащую в плоскости
, лежащую в плоскости  . Используем начало координат, и, например, точку
. Используем начало координат, и, например, точку  . б) Сначала удобно построить прямую
. б) Сначала удобно построить прямую  , лежащую в плоскости
, лежащую в плоскости  . Используем начало координат, и, например, точку
. Используем начало координат, и, например, точку  .
. 
Пример 6: Решение: запишем уравнение плоскости в отрезках: 
Выполним чертёж: 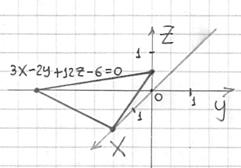
Пример 10: Решение: функция  задаёт верхнюю часть цилиндра
задаёт верхнюю часть цилиндра  :
: 
Проекция на плоскость  : часть данной плоскости, ограниченная «плоскими» прямыми
: часть данной плоскости, ограниченная «плоскими» прямыми  (включая прямые).
(включая прямые).
Проекция на плоскость  : часть данной плоскости, ограниченная прямыми
: часть данной плоскости, ограниченная прямыми  (
(  – любое), включая сами прямые.
– любое), включая сами прямые.
Проекция на плоскость  : полуокружность
: полуокружность 
Пример 12: Чертежи: 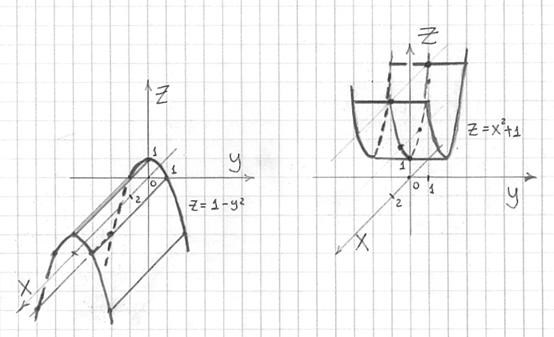
Пример 13: Решение: данный эллипсоид получен вращением эллипса  (плоскость
(плоскость  ) вокруг оси
) вокруг оси  :
: 
Примечание: также можно считать, что вращается эллипс  , лежащий в плоскости
, лежащий в плоскости  .
.
Пример 15: Решение: областью определения данной функции является круг  с центром в начале координат радиуса
с центром в начале координат радиуса  . Функция
. Функция  задаёт полусферу, лежащую в верхнем полупространстве, с центром в начале координат радиуса
задаёт полусферу, лежащую в верхнем полупространстве, с центром в начале координат радиуса  :
: 
Пример 17: Решение: сечения конуса плоскостями  представляют собой окружности
представляют собой окружности  . Выполним чертёж:
. Выполним чертёж: 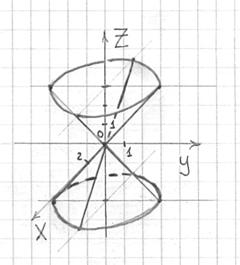
Неравенство  задаёт множество точек, находящихся внутри конуса; неравенство
задаёт множество точек, находящихся внутри конуса; неравенство  задаёт множество внешних точек.
задаёт множество внешних точек.
Пример 20: Решение: вершина параболоида находится в точке  . Выполним чертёж:
. Выполним чертёж: 
Автор: Емелин Александр
(Переход на главную страницу)
 Zaochnik.com – профессиональная помощь студентам
Zaochnik.com – профессиональная помощь студентам
cкидкa 15% на первый зaкaз, при оформлении введите прoмoкoд: 5530-hihi5
Общее уравнение плоскости : описание, примеры, решение задач
В статье рассмотрим такой тип уравнений плоскости как общее уравнение, получим его вид и разберем на практических примерах. Рассмотрим частные случаи и понятие общего неполного уравнения плоскости.
Общее уравнение плоскости: основные сведения
Перед началом разбора темы вспомним, что такое уравнение плоскости в прямоугольной системе координат в трёхмерном пространстве. Пусть нам дана прямоугольная система координат O x y z в трехмерном пространстве, уравнением плоскости в заданной системе координат будет такое уравнение с тремя неизвестными x , y , и z , которому отвечали бы координаты всех точек этой плоскости и не отвечали бы координаты никаких прочих точек. Иначе говоря, подставив в уравнение плоскости координаты некоторой точки этой плоскости, получаем тождество. Если же в уравнение подставить координаты какой-то другой точки, не принадлежащей заданной плоскости, равенство станет неверным.
Также вспомним определение прямой, перпендикулярной к плоскости: прямая является перпендикулярной к заданной плоскости, если она перпендикулярна любой прямой, принадлежащей этой плоскости.
Любую плоскость, заданную в прямоугольной системе координат O x y z трехмерного пространства, можно определить уравнением A x + B y + C z + D = 0 . В свою очередь, любое уравнение A x + B y + C z + D = 0 определяет некоторую плоскость в данной прямоугольной системе координат трехмерного пространства. A , B , C , D – некоторые действительные числа, и числа A , B , C не равны одновременно нулю.
Теорема состоит из двух частей. Разберем доказательство каждой из них.
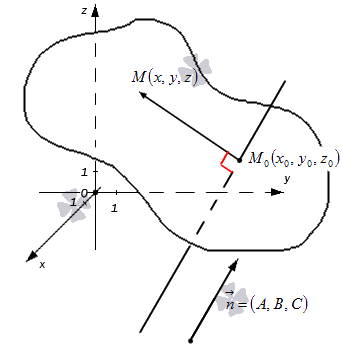
- Первая часть теоремы гласит, что любую заданную плоскость возможно описать уравнением вида A x + B y + C z + D = 0 . Допустим, задана некоторая плоскость и точка M 0 ( x 0 , y 0 , z 0 ) , через которую эта плоскость проходит. Нормальным вектором этой плоскости является n → = ( A , B , C ) . Приведем доказательство, что указанную плоскость в прямоугольной системе координат O x y z задает уравнение A x + B y + C z + D = 0 .
Возьмем произвольную точку заданной плоскости M ( x , y , z ) .В таком случае векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) будут перпендикулярны друг другу, а значит их скалярное произведение равно нулю:
n → , M 0 M → = A x — x 0 + B ( y — y 0 ) + C ( z — z 0 ) = A x + B y + C z — ( A x 0 + B y 0 + C z 0 )
Примем D = — ( A x 0 + B y 0 + C z 0 ) , тогда уравнение преобразуется в следующий вид: A x + B y + C z + D = 0 . Оно и будет задавать исходную плоскость. Первая часть теоремы доказана.
- Во второй части теоремы утверждается, что любое уравнение вида A x + B y + C z + D = 0 задает некоторую плоскость в прямоугольной системе координат O x y z трехмерного пространства. Докажем это.
В теореме также указано, что действительные числа А , B , C одновременно не являются равными нулю. Тогда существует некоторая точка M 0 ( x 0 , y 0 , z 0 ) , координаты которой отвечают уравнению A x + B y + C z + D = 0 , т.е. верным будет равенство A x 0 + B y 0 + C z 0 + D = 0 . Отнимем левую и правую части этого равенства от левой и правой частей уравнения A x + B y + C z + D = 0 . Получим уравнение вида
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 , и оно эквивалентно уравнению A x + B y + C z + D = 0 . Докажем, что уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает некоторую плоскость.
Уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 являет собой условие, необходимое и достаточное для перпендикулярности векторов n → = ( A , B , C ) и M 0 M → = x — x 0 , y — y 0 , z — z 0 . Опираясь на утверждение, указанное перед теоремой, возможно утверждать, что при справедливом равенстве A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 множество точек M ( x , y , z ) задает плоскость, у которой нормальный вектор n → = ( A , B , C ) . При этом плоскость проходит через точку M ( x 0 , y 0 , z 0 ) . Иначе говоря, уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает в прямоугольной системе координат O x y z трехмерного пространства некоторую плоскость. Таким, образом, эквивалентное этому уравнению уравнение A x + B y + C z + D = 0 также определяет эту плоскость. Теорема доказана полностью.
Уравнение вида A x + B y + C z + D = 0 называют общим уравнением плоскости в прямоугольной системе координат O x y z трехмерного пространства.
Допустим, задано некоторое общее уравнение плоскости λ · A x + λ · B y + λ · C z + λ · D = 0 , где λ – некое действительное число, не равное нулю. Это уравнение также задает в прямоугольной системе координат некоторую плоскость, совпадающую с плоскостью, определяемую уравнением A x + B y + C z + D = 0 , поскольку описывает то же самое множество точек трехмерного пространства. Например, уравнения x — 2 · y + 3 · z — 7 = 0 и — 2 · x + 4 · y — 2 3 · z + 14 = 0 задают одну и ту же плоскость, поскольку им обоим отвечают координаты одних и тех же точек трехмерного пространства.
Раскроем чуть шире смысл теорем.
В пределах заданной системы координат плоскость и общее уравнение, ее определяющее, неразрывно связаны: каждой плоскости отвечает общее уравнение плоскости вида A x + B y + C z + D = 0 ( при конкретных значениях чисел A , B , C , D ). В свою очередь, этому уравнению отвечает заданная плоскость в заданной прямоугольной системе координат.
Укажем пример как иллюстрацию этих утверждений.
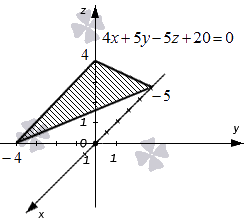
Ниже приведен чертеж, на котором изображена плоскость в фиксированной прямоугольной системе координат трехмерного пространства. Заданной плоскости отвечает общее уравнение вида 4 x + 5 y – 5 z + 20 = 0 , и ему соответствуют координаты любой точки этой плоскости. В свою очередь, уравнение 4 x + 5 y – 5 z + 20 = 0 описывает в заданной системе координат множество точек, которые составляют изображенную плоскость.
Общее уравнение плоскости, проходящей через точку
Повторимся: точка M 0 ( x 0 , y 0 , z 0 ) лежит на плоскости, заданной в прямоугольной системе координат трехмерного пространства уравнением A x + B y + C z + D = 0 в том случае, когда подставив координаты точки M 0 ( x 0 , y 0 , z 0 ) в уравнение A x + B y + C z + D = 0 , мы получим тождество.
Заданы точки M 0 ( 1 , — 1 , — 3 ) и N 0 ( 0 , 2 , — 8 ) и плоскость, определяемая уравнением 2 x + 3 y — z — 2 = 0 . Необходимо проверить, принадлежат ли заданные точки заданной плоскости.
Решение
Подставим координаты точки М 0 в исходной уравнение плоскости:
2 · 1 + 3 · ( — 1 ) — ( — 3 ) — 2 = 0 ⇔ 0 = 0
Мы видим, что получено верное равенство, значит точка M 0 ( 1 , — 1 , — 3 ) принадлежит заданной плоскости.
Аналогично проверим точку N 0 . Подставим ее координаты в исходное уравнение:
2 · 0 + 3 · 2 — ( — 8 ) — 2 = 0 ⇔ 12 = 0
Равенство неверно. Таким, образом, точка N 0 ( 0 , 2 , — 8 ) не принадлежит заданной плоскости.
Ответ: точка М 0 принадлежит заданной плоскости; точка N 0 – не принадлежит.
Приведенное выше доказательство теоремы об общем уравнении дает нам возможность использовать важный факт: вектор n → = ( A , B , C ) — нормальный вектор для плоскости, определяемой уравнением A x + B y + C z + D = 0 . Так, если нам известен вид общего уравнения, то возможно записать координаты нормального вектора заданной плоскости.
В прямоугольной системе координат задана плоскость 2 x + 3 y — z + 5 = 0 . Необходимо записать координаты всех нормальных векторов заданной плоскости.
Решение
Мы знаем, что заданные общим уравнением коэффициенты при переменных x , y , z служат координатами нормального вектора заданной плоскости. Тогда, нормальный вектор n → исходной плоскости имеет координаты 2 , 3 , — 1 . В свою очередь, множество нормальных векторов запишем так:
λ · n → = λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Ответ: λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Разберем обратную задачу, когда требуется составить уравнение плоскости по заданным координатам нормального вектора.
Очевидным фактом является то, что нормальный вектор n → = ( A , B , C ) является нормальным вектором бесконечного множества параллельных плоскостей. Поэтому для обозначения конкретной плоскости введем дополнительное условие: зададим некоторую точку M 0 ( x 0 , y 0 , z 0 ) , принадлежащую плоскости. Так, задавая в условии нормальный вектор и некоторую точку плоскости, мы ее зафиксировали.
Общее уравнение плоскости с нормальным вектором n → = ( A , B , C ) будет выглядеть так: A x + B y + C z + D = 0 . По условию задачи точка M 0 ( x 0 , y 0 , z 0 ) принадлежит заданной плоскости, т.е. ее координаты отвечают уравнению плоскости, а значит верно равенство: A x 0 + B y 0 + C z 0 + D = 0
Вычитая соответственно правые и левые части исходного уравнения и уравнения A x 0 + B y 0 + C z 0 + D = 0 , получим уравнение вида A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 . Оно и будет уравнением плоскости, проходящей через точку M 0 ( x 0 , y 0 , z 0 ) и имеющей нормальный вектор n → = ( A , B , C ) .
Возможно получить это уравнение другим способом.
Очевидным фактом является то, что все точки М ( x , y , z ) трехмерного пространства задают данную плоскость тогда и только тогда, когда векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) перпендикулярны или, иначе говоря, когда скалярное произведение этих векторов равно нулю:
n → , M 0 M → = A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
Задана точка М 0 ( — 1 , 2 , — 3 ) , через которую в прямоугольной системе координат проходит плоскость, а также задан нормальный вектор этой плоскости n → = ( 3 , 7 , — 5 ) . Необходимо записать уравнение заданной плоскости.
Решение
Рассмотрим два способа решения.
- Исходные условия позволяют получить следующие данные:
x 0 = — 1 , y 0 = 2 , z 0 = — 3 , A = 3 , B = 7 , C = — 5
Подставим их в общее уравнение плоскости, проходящей через точку, т.е. в A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
3 ( x — ( — 1 ) ) + 7 ( y — 2 ) — 5 ( z — ( — 3 ) ) = 0 ⇔ 3 x + 7 y — 5 z — 26 = 0
- Допустим, М ( x , y , z ) – некоторая точки заданной плоскости. Определим координаты вектора M 0 M → по координатам точек начала и конца:
M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) = ( x + 1 , y — 2 , z + 3 )
Чтобы получить искомое общее уравнение плоскости, необходимо также воспользоваться необходимым и достаточным условием перпендикулярности векторов и тогда:
n → , M 0 M → = 0 ⇔ 3 ( x + 1 ) + 7 ( y — 2 ) — 5 ( z + 3 ) = 0 ⇔ ⇔ 3 x + 7 y — 5 z — 26 = 0
Ответ: 3 x + 7 y — 5 z — 26 = 0
Неполное общее уравнение плоскости
Выше мы говорили о том, что, когда все числа А , B , C , D отличны от нуля, общее уравнение плоскости A x + B y + C z + D = 0 называют полным. В ином случае общее уравнение плоскости является неполным.
Разберем все возможные варианты общих неполных уравнений в прямоугольной системе координат трехмерного пространства.
- В случае, когда D = 0 , мы получаем общее неполное уравнение плоскости: A x + B y + C z + D = 0 ⇔ A x + B y + C z = 0
Такая плоскость в прямоугольной системе координат проходит через начало координат. В самом деле, если подставим в полученное неполное уравнение плоскости координаты точки О ( 0 , 0 , 0 ) , то придем к тождеству:
A · 0 + B · 0 + C · 0 = 0 ⇔ 0 ≡ 0
- Если А = 0 , В ≠ 0 , С ≠ 0 , или А ≠ 0 , В = 0 , С ≠ 0 , или А ≠ 0 , В ≠ 0 , С = 0 , то общие уравнения плоскостей имеют вид соответственно: B y + C z + D = 0 , или A x + C z + D = 0 , или A x + B y + D = 0 . Такие плоскости параллельны координатным осям О x , O y , O z соответственно. Когда D = 0 , плоскости проходят через эти координатные оси соответственно. Также заметим, что неполные общие уравнения плоскостей B y + C z + D = 0 , A x + C z + D = 0 и A x + B y + D = 0 задают плоскости, которые перпендикулярны плоскостям O y z , O x z , O z y соответственно.
- При А = 0 , В = 0 , С ≠ 0 , или А = 0 , В ≠ 0 , С = 0 , или А ≠ 0 , В = 0 , С = 0 получим общие неполные уравнения плоскостей: C z + D = 0 ⇔ z + D C = 0 ⇔ z = — D C ⇔ z = λ , λ ∈ R или B y + D = 0 ⇔ y + D B = 0 ⇔ y = — D B ⇔ y = λ , λ ∈ R или A x + D = 0 ⇔ x + D A = 0 ⇔ x = — D A ⇔ x = λ , λ ∈ R соответственно.
Эти уравнения определяют плоскости, которые параллельны координатным плоскостям O x y , O x z , O y z соответственно и проходят через точки 0 , 0 , — D C , 0 , — D B , 0 и — D A , 0 , 0 соответственно. При D = 0 уравнения самих координатных плоскостей O x y , O x z , O y z выглядят так: z = 0 , y = 0 , x = 0
Задана плоскость, параллельная координатной плоскости O y z и проходящая через точку М 0 ( 7 , — 2 , 3 ) . Необходимо составить общее уравнение заданной плоскости.
Решение
Условием задачи определено, что заданная плоскость параллельна координатной плоскости O y z , а, следовательно, может быть задана общим неполным уравнением плоскости A x + D = 0 , A ≠ 0 ⇔ x + D A = 0 . Поскольку точка M 0 ( 7 , — 2 , 3 ) лежит на плоскости по условию задачи, то очевидно, что координаты этой точки должны отвечать уравнению плоскости x + D A = 0 , иначе говоря, должно быть верным равенство 7 + D A = 0 . Преобразуем: D A = — 7 , тогда требуемое уравнение имеет вид: x — 7 = 0 .
Задачу возможно решить еще одним способом.
Вновь обратим внимание на заданную условием задачи параллельность данной плоскости координатной плоскости O y z . Из этого условия понятно, что возможно в качестве нормального вектора заданной плоскости использовать нормальный вектор плоскости O y z : i → = ( 1 , 0 , 0 ) . Так, нам известны и точка, принадлежащая плоскости (задана условием задачи) и ее нормальный вектор. Таким образом, становится возможно записать общее уравнение заданной плоскости:
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 ⇔ ⇔ 1 · ( x — 7 ) + 0 · ( y + 2 ) + 0 · ( z — 3 ) = 0 ⇔ ⇔ x — 7 = 0
Ответ: x — 7 = 0
Задана плоскость, перпендикулярная плоскости O x y и проходящая через начало координат и точку М 0 ( — 3 , 1 , 2 ) .
Решение
Плоскость, которая перпендикулярна координатной плоскости O x y определяется общим неполным уравнением плоскости A x + B y + D = 0 ( А ≠ 0 , В ≠ 0 ) . Условием задачи дано, что плоскость проходит через начало координат, тогда D = 0 и уравнение плоскости принимает вид A x + B y = 0 ⇔ x + B A y = 0 .
Найдем значение B A . В исходных данных фигурирует точка М 0 ( — 3 , 1 , 2 ) , координаты которой должны отвечать уравнению плоскости. Подставим координаты, получим верное равенство: — 3 + B A · 1 = 0 , откуда определяем B A = 3 .
Так, мы имеем все данные, чтобы записать требуемое общее уравнение плоскости: x + 3 y = 0 .
http://mathprofi.net/poverhnosti.html
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/obschee-uravnenie-ploskosti/