Приведение к каноническому виду линейных уравнений с частными производными второго порядка

Федеральное агентство по образованию
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Институт математики, экономики и информатики
Кафедра дифференциальных и интегральных уравнений
ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ ЛИНЕЙНЫХ УРАВНЕНИЙ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ ВТОРОГО ПОРЯДКА
Приведение к каноническому виду линейных уравнений с частными производными 2-го порядка с двумя независимыми переменными …………………………………………………………………………
1.1. Необходимый теоретический материал………………………..
1.2. Пример выполнения задачи1 (приведение к
каноническому виду уравнений гиперболического типа) .
1.3. Пример выполнения задачи 2 (приведение к
каноническому виду уравнений параболического типа)
1.4. Пример выполнения задачи 3 (приведение к
каноническому виду уравнений эллиптического типа) ..
1.5. Задачи для самостоятельного решения ………………….….
Упрощение группы младших производных
для уравнений второго порядка с постоянными коэффициентами
2.1. Необходимый теоретический материал …………………..
2.2. Пример выполнения задачи 4
2.3. Задачи для самостоятельного решения ……………………..
В настоящих методических указаниях изложен теоретический материал и на конкретных примерах разобрано приведение к каноническому виду линейных уравнений с частными производными второго порядка с двумя независимыми переменными для уравнений гиперболического, эллиптического и параболического типов.
Методические указания предназначены для студентов математических специальностей очной и заочной формы обучения.
§1. Приведение к каноническому виду линейных уравнений с частными производными 2-го порядка с двумя независимыми переменными.
Задача. Определить тип уравнения
 (1)
(1)
и привести его к каноническому виду.
1.1. Необходимый теоретический материал.
I. Тип уравнения (1) определяется знаком выражения  :
:
· если  в некоторой точке, то уравнение (1) называется уравнением гиперболического типа в этой точке;
в некоторой точке, то уравнение (1) называется уравнением гиперболического типа в этой точке;
· если  в некоторой точке, то уравнение (1) называется уравнением эллиптического типа в этой точке;
в некоторой точке, то уравнение (1) называется уравнением эллиптического типа в этой точке;
· если  в некоторой точке, то уравнение (1) называется уравнением параболического типа в этой точке.
в некоторой точке, то уравнение (1) называется уравнением параболического типа в этой точке.
Уравнение (1) будет являться уравнением гиперболического, эллиптического, параболического типа в области D, если оно гиперболично, эллиптично, параболично в каждой точке этой области.
Уравнение (1) может менять свой тип при переходе из одной точки (области) в другую. Например, уравнение  является уравнением эллиптического типа в точках
является уравнением эллиптического типа в точках  ; параболического типа в точках
; параболического типа в точках  ; и гиперболического типа в точках
; и гиперболического типа в точках  .
.
II. Чтобы привести уравнение к канонического виду, необходимо:
1. Определить коэффициенты  ;
;
2. Вычислить выражение ;
3. Сделать вывод о типе уравнения (1) (в зависимости от знака выражения );
4. Записать уравнение характеристик:
 ; (2)
; (2)
5. Решить уравнение (2). Для этого:
а) разрешить уравнение (2) как квадратное уравнение относительно dy:
 ; (3)
; (3)
б) найти общие интегралы уравнений (3) (характеристики уравнения (1)):
·  (4)
(4)
в случае уравнения гиперболического типа;
·  , (5)
, (5)
в случае уравнения параболического типа;
·  , (6)
, (6)
в случае уравнения эллиптического типа.
6. Ввести новые (характеристические) переменные  и
и  :
:
· в случае уравнения гиперболического типа в качестве и берут общие интегралы (4) уравнений (3), т. е.

· в случае уравнения параболического типа в качестве берут общий интеграл (5) уравнения (3), т. е.  , в качестве берут произвольную, дважды дифференцируемую функцию
, в качестве берут произвольную, дважды дифференцируемую функцию  , не выражающуюся через
, не выражающуюся через  , т. е.
, т. е.  ;
;
· в случае уравнения эллиптического типа в качестве и берут вещественную и мнимую часть любого из общих интегралов (6) уравнений (3):

7. Пересчитать все производные, входящие в уравнение (1), используя правило дифференцирования сложной функции:

 ,
,
 ,
,
 , (7)
, (7)
 ,
,
 .
.
8. Подставить найденные производные в исходное уравнение (1) и привести подобные слагаемые. В результате уравнение (1) примет один из следующих видов:
· в случае уравнения гиперболического типа:
 ;
;
· в случае уравнения параболического типа:
 ;
;
· в случае уравнения эллиптического типа:
 .
.
1.2. Пример выполнения задачи 1.
Определить тип уравнения
и привести его к каноническому виду.
1. Определим коэффициенты :
2. Вычислим выражение :
 .
.
3.  уравнение гиперболического типа во всей плоскости XOY.
уравнение гиперболического типа во всей плоскости XOY.
4. Запишем уравнение характеристик:
 . (9)
. (9)
5. Решим уравнение (9). Для этого:
а) разрешаем уравнение (9) как квадратное уравнение относительно dy:  ;
;
 ;
;

 (10)
(10)
б) найдём общие интегралы уравнений (10) (характеристики уравнения (9)):

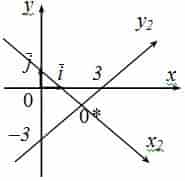
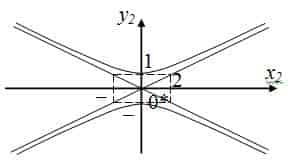
6. Введём характеристические переменные:

7. Пересчитаем производные, входящие в исходное уравнение.

Используя формулы (7), получим:

Здесь слева написаны коэффициенты уравнения (8) при соответствующих производных.
8. Собирая подобные слагаемые, получим:

Или после деления на -100 (коэффициент при  ):
):

Ответ. Уравнение (8) является уравнением гиперболического типа на всей плоскости XOY. Канонический вид

где 
1.3. Пример выполнения задачи 2.
Определить тип уравнения
и привести его к каноническому виду.
1. Определим коэффициенты . В нашем примере они постоянны:
2. Вычислим выражение :
 .
.
3.  уравнение параболического типа во всей плоскости XOY.
уравнение параболического типа во всей плоскости XOY.
4. Запишем уравнение характеристик:
 . (12)
. (12)
5. Решим уравнение (12). Для этого:
а) разрешаем уравнение (9) как квадратное уравнение относительно dy. Однако в этом случае левая часть уравнения является полным квадратом:
 ;
;
 (13)
(13)
б) имеем только одно уравнение характеристик (13). Найдём его общий интеграл (уравнения параболического типа имеют только одно семейство вещественных характеристик):

6. Введём характеристические переменные: одну из переменных  вводим как и ранее
вводим как и ранее

а в качестве берут произвольную, дважды дифференцируемую функцию, не выражающуюся через , пусть
 ;
;
7. Пересчитаем производные, входящие в исходное уравнение.

Используя формулы (7), получим:

Здесь слева написаны коэффициенты уравнения (11) при соответствующих производных.
8. Собирая подобные слагаемые, получим:

Функцию, стоящую в правой части уравнения (11) необходимо также выразить через характеристические переменные.
После деления на 25 (коэффициент при  ):
):

Ответ. Уравнение (11) является уравнением параболического типа на всей плоскости XOY. Канонический вид
где 
1.4. Пример выполнения задачи 3.
Определить тип уравнения
 (14)
(14)
и привести его к каноническому виду.
1. Определим коэффициенты :
2. Вычислим выражение :
 .
.
3.  уравнение эллиптического типа во всей плоскости XOY.
уравнение эллиптического типа во всей плоскости XOY.
4. Запишем уравнение характеристик:
 . (15)
. (15)
5. Решим уравнение (15). Для этого:
а) разрешаем уравнение (15) как квадратное уравнение относительно dy:  ; (16)
; (16)
б) уравнения (16) – это пара комплексно-сопряженных уравнений. Они имеют пару комплексно-сопряженных общих интегралов. (Уравнения эллиптического типа не имеют вещественных характеристик)
 (17)
(17)
6. Введём характеристические переменные как вещественную и мнимую части одного из общих интегралов (17):

7. Пересчитаем производные, входящие в исходное уравнение.

Используя формулы (7), получим:

Здесь слева написаны коэффициенты уравнения (14) при соответствующих производных.
8. Собирая подобные слагаемые, получим:

Или после деления на 4 (коэффициент при  и
и  ):
):

Ответ. Уравнение (14) является уравнением эллиптического типа на всей плоскости XOY. Канонический вид
где 
1.5. Задачи для самостоятельного решения.
Определить тип уравнения и привести его к каноническому виду.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
Определить тип уравнения и привести его к каноническому виду.










Определить тип уравнения и привести его к каноническому виду.










§2. Упрощение группы младших производных
для уравнений второго порядка с постоянными коэффициентами
2. 1. Необходимый теоретический материал
В самом общем виде линейное уравнение с частными производными второго порядка с двумя независимыми переменными имеет вид
 (1)
(1)
Преобразованием независимых переменных группа старших производных уравнения может быть упрощена. Уравнение (1) приводится к одному из следующих видов
· в случае уравнения гиперболического типа:
 ; (11)
; (11)
· в случае уравнения параболического типа:
 ; (12)
; (12)
· в случае уравнения эллиптического типа:
 . (13)
. (13)
Если коэффициенты исходного уравнения постоянны, то для дальнейшего упрощения уравнения любого типа нужно сделать замену неизвестной функции
 , (14)
, (14)
где  — новая неизвестная функция,
— новая неизвестная функция,  — параметры, подлежащие определению. Такая замена не «испортит» канонического вида, но при этом позволит подобрать параметры так, чтобы из трех слагаемых группы младших производных в уравнении осталось только одно. Уравнения гиперболического, параболического и эллиптического типов соответственно примут вид
— параметры, подлежащие определению. Такая замена не «испортит» канонического вида, но при этом позволит подобрать параметры так, чтобы из трех слагаемых группы младших производных в уравнении осталось только одно. Уравнения гиперболического, параболического и эллиптического типов соответственно примут вид
 ;
;
 ;
;
 .
.
Чтобы реализовать замену (14) в уравнениях (11), (12), (13), необходимо пересчитать все производные, входящие в эти уравнения по формулам
 (15)
(15)
Подробно рассмотрим этот процесс на примере уравнения гиперболического типа, т. е. уравнения (11). Пересчитаем производные, входящие в это уравнение, используя формулы (15).

Здесь слева расставлены соответствующие коэффициенты уравнения (11). Собирая подобные слагаемые, получим
 . (16)
. (16)
В уравнении (16) приравняем к нулю коэффициенты при  и
и 

Откуда  Подставив эти значения параметров в уравнение (16) и разделив его на
Подставив эти значения параметров в уравнение (16) и разделив его на  , придем к уравнению
, придем к уравнению
,
где  .
.
2.2. Пример выполнения задачи 4
к каноническому виду и упростить группу младших производных.
9. Определим коэффициенты :
10. Вычислим выражение :
 .
.
11.  уравнение эллиптического типа во всей плоскости XOY.
уравнение эллиптического типа во всей плоскости XOY.
12. Запишем уравнение характеристик:
 . (18)
. (18)
5. Решим уравнение (18). Для этого:
а) разрешаем уравнение (18) как квадратное уравнение относительно dy:  ;
;
 ; (19)
; (19)
б) найдём общие интегралы уравнений (19) (характеристики уравнения (17)):

6. Введём характеристические переменные:

13. Пересчитаем производные, входящие в исходное уравнение.

Используя формулы (7), получим:

Здесь слева написаны коэффициенты уравнения (17) при соответствующих производных.
14. Собирая подобные слагаемые, получим:

 (20)
(20)
Теперь с помощью замены неизвестной функции (14)
упростим группу младших производных.
Пересчитаем производные, входящие в уравнение (20), используя формулы (15).

Здесь слева расставлены соответствующие коэффициенты уравнения (20). Собирая подобные слагаемые, получим
 . (21)
. (21)
В уравнении (21) приравняем к нулю коэффициенты при и

Откуда  Подставив эти значения параметров в уравнение (21) и разделив его на , придем к уравнению
Подставив эти значения параметров в уравнение (21) и разделив его на , придем к уравнению
 .
.
Ответ. Уравнение (20) является уравнением эллиптического типа на всей плоскости XOY. Его канонический вид
,
где 
 .
.
2.3. Задачи для самостоятельного решения
Задача 4. Привести уравнения к каноническому виду и упростить группу младших производных.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
 .
.
Преобразования аффинных систем к каноническому виду с использованием замен независимой переменной Текст научной статьи по специальности « Математика»
Аннотация научной статьи по математике, автор научной работы — Касаткина Т. С.
Замена переменной дифференцирования (масштабирование времени) предоставляет дополнительную степень свободы при эквивалентных преобразованиях динамических систем. Преобразование аффинных систем к каноническому виду является универсальным инструментом для решения задач управления. Рассматривается задача преобразования стационарных аффинных систем к каноническому виду с использованием замены независимой переменной (времени). Рассматриваются два типа замен: интегрируемые и неинтегрируемые. Доказано, что после выполнения интегрируемой замены аффинные системы не преобразуются к каноническому виду. Для аффинных систем третьего порядка со скалярным управлением получены условия, при которых после выполнения неинтегрируемой замены независимой переменной аффинная система преобразуются к регулярному каноническому виду.
Похожие темы научных работ по математике , автор научной работы — Касаткина Т. С.
Текст научной работы на тему «Преобразования аффинных систем к каноническому виду с использованием замен независимой переменной»
НАУЧНОЕ ИЗДАНИЕ МГТУ ИМ. Н. Э. БАУМАНА
НАУКА и ОБРАЗОВАНИЕ
Эл № ФС77 — 48211. Государственная регистрация №0421200025. ISSN 1994-0408
электронный научно-технический журнал
Преобразования аффинных систем к каноническому виду
с использованием замен независимой переменной
Россия, МГТУ им. Н.Э. Баумана kasatkina_t_s@mail.ru
Актуальным является вопрос преобразования аффинных динамических систем
где и — управление, к каноническому виду. В [1] приведены условия, при выполнении которых с помощью диффеоморфизма пространства состояний, система (1) приводится к каноническому виду. Однако эти условия не всегда выполняются.
Замена переменной дифференцирования (масштабирование времени) предоставляет дополнительную степень свободы при эквивалентных преобразованиях динамических систем. Эквивалентное преобразование динамической системы к линейной управляемой системе с использованием замены времени и последующей линеаризации системы обратной связью впервые было предложено в [2]. В этой работе приведены условия, при которых такое преобразование существует. Системы, удовлетворяющие этим условиям, названы линеаризуемыми обратной связью в широком смысле. Проверка этих условий сводится к поиску функции масштабирования времени и проверке условий линеаризации обратной связью для системы, записанной в новом времени. Функция масштабирования представляет собой решение нелинейной системы дифференциальных уравнений в частных производных. Поиск этого решения, особенно в случае больших размерностей пространства состояний системы, является довольно сложной задачей.
В [3, 4] изложенная выше стратегия преобразования системы к линейной управляемой системе названа орбитальной линеаризацией обратной связью. В этих работах в терминах дифференциальной геометрии сформулированы условия, которым должна удовлетворять
исходная система, для того чтобы она была орбитально линеаризуема обратной связью. Разработаны алгоритмы орбитальной линеаризации обратной связью для систем со скалярным [4, 5] и векторным управлением [6].
Масштабирование времени применяется в теории управления для поиска оптимальных траекторий, уменьшения отклонения в задачах следования вдоль заданной траектории [7, 8] и заданной кривой [9, 10, 11].
Ряд работ посвящен построению наблюдателя со скалярным [12] и векторным выходом [13]. Также масштабирование времени используется при решении задач стабилизации плоских систем при наличии сингулярностей при некоторых значениях управления [14].
В данной статье исследуется возможность преобразования аффинных систем (1) к каноническому виду с использованием замены независимой переменной (времени). Рассматривается два типа замен: интегрируемые и неинтегрируемые.
Разделы статьи организованы следующим образом. В разд. 1 изложена постановка задачи. В разд. 2 дано определение и классификация замен независимой переменной. В разд. 3 показано, что после выполнения интегрируемой замены преобразованная система не приводится к каноническому виду. В разд. 4 получен вид функции, определяющей неинте-грируемую замену, после выполнения которой система приводится к каноническому виду, который является регулярным.
1. Постановка задачи
Рассмотрим многомерную аффинную систему
А(х) + В(х)и, х Е П С Еп, и Е
где В(ж) = (ж)) — матрица типа п х т; А(ж) = (а\(х), . ап(х)) — вектор-функция; аг Е Сте(П); П — открытое множество в Еп; и = (и1. ит), г = 1, т, — управление;
— — дифференцирование по независимой переменной г.
Обозначим В^ (х), ] = 1, т, ^’-й столбец матрицы В (х). Здесь и далее будем ассоци-
ировать с вектор-функциями А(х), В\(х), .. ., Вт(х) векторные поля А, В1 соответствующими координатными представлениями. Аффинную систему вида
называют системой канонического вида. Если д(х) = 0, то канонический вид называют регулярным.
Будем рассматривать системы, которые не приводятся к регулярному каноническому виду в окрестности некоторой точки ж0 € П. Это означает невыполнение хотя бы одного из двух условий [1]:
1) матрица управляемости
U = (Bi, . Bm, adA Bi, . adA Bm, . ad^»1 Bi, . ad^»1 Bm
невырождена в точке x 2)распределение
инволютивно в окрестности точки x .
Здесь и далее adx У = [X, У], adX У = adA(adA-1 У), к = 2, 3, . и [X, У] обозначает коммутатор векторных полей X и У.
2. Замены независимой переменной
Введем новую независимую переменную т с помощью соотношения
где 0 Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Из формулы (6) следует, что п-я координата коммутатора векторных полей [Р, Q] в окрестности точки х0 равна нулю. Лемма доказана.
Теорема 1. Если в системе (2) в области О с П сделана интегрируемая замена независимой переменной, то ранг матрицы управляемости преобразованной системы (5) меньше п в области О.
Доказательство. Прежде чем в системе (2) перейти к дифференцированию по новой независимой переменной, сделаем замену переменных состояния, которая является невырожденной. Поскольку Af (х) = §гаё f (х) ■ А(х) > 0 при х € О, то вектор-функция §гаё f (х) не является нулевой. Значит, она имеет хотя бы одну ненулевую координату в точке х0 € О. Без ограничений общности будем считать, что это координата с номером п.
¿1 = хь . гп-1 = х„_1, гп = f (х), (7)
которые задают отображение Ф : Кп ^ Кп. Матрица Якоби системы функций (7) имеет вид
\ дж1 джг » джп-1 джп /
Определитель матрицы Якоби (8) в точке х0 не равен нулю:
Следовательно, в некоторой окрестности точки Ф(х0) существует обратное отображение Ф-1, определяемое соотношениями
х1 = ¿1, . хп_1 = ¿п_1, хп = Ф(г),
и соотношения (7) задают гладкую невырожденную замену переменных в окрестности точки х0. После замены переменных (7) система (2) принимает вид
¿3 = а(¿1. ,^п_1, Ф(г)) + ¿1. ,^п_1, Ф(г))м, 3 = 1, п — 1;
Сделав в системе (9) интегрируемую замену независимой переменной
Т = f (х) = f (¿1. 2п_1, Ф(¿)),
Столбцы координат векторных полей А, В7, у = 1, т, системы (10) имеют вид
( bij (zi. zn-i, Ф(г)) \ /(zb. z„—i, Ф(*))
bn — i ,j (zb . . . Ф(*)) f (zi. Zn— i, Ф(*))
( ai(zi. ,zn—i, Ф(-г)) \ f (zi. zn—i, Ф(г))
Векторные поля А, В7 с координатными представлениями (11) удовлетворяют условию леммы в окрестности точки х0. Следовательно, координаты с номером п векторных полей аёд В7, у = 1, т, равны нулю в окрестности точки х0. Продолжая рассуждения таким
образом, заключаем, что координаты векторных полей ао
В7, у = 1, т, к = 2, п — 1, с номером п равны нулю в окрестности точки х0. Итак, строка с номером п матрицы управляемости С/(^1. £п-1, Ф(^))) в точке Ф-1(х0) состоит из нулевых элементов, поэтому
rank/(Ф—^x0)) Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Вводя новое управление м = в(х)^, получим систему
А(х) = /^2(х)5(х) , В(х) = 0
(отметим, что это условие является необходимым для невырожденности матрицы управляемости системы (17) в некоторой окрестности точки х0). Тогда необходимым и достаточным условием инволютивности распределения А в некоторой окрестности О(х0) точки х0 является выполнение в этой окрестности равенства
Для удобства введем следующие обозначения:
В этих обозначениях условие (18) имеет вид
Записанное равенство в предположении, что ^1(х) = 0, х € О(х0), эквивалентно соотношению
Уравнение (19) означает, что функция не зависит от х3, т.е. для некоторой функции
f (х1, х2) имеет место равенство
Для учета соображений симметрии функцию / представим в следующем виде
Тогда равенство (20) можно записать в виде
02(ж1,Ж2) + а] (х], х2) = 0. (21)
Проинтегрировав (21) по х3, получим
в(х)а2/2(х) + в(х)а1/1(х) = с(хьх2), откуда следует, что функция в(х) имеет следующее представление:
или, более коротко
Из приведенных выкладок вытекает, что если выбрать функцию 5 по формуле (22), где с, а1, а2 не зависят от х3, то будет выполняться условие (18), т.е. распределение А будет инволютивным.
Пример. Рассмотрим систему
х1 = х2^(х), х2 = х3^(х), х3 = V. (23)
В случае ^(х) = х2 + х2 + х2 система (23) не приводится к регулярному каноническому виду, так как для нее выполнено условие (16). Зададим с(х1,х2) = х2, а1(х1,х2) = 1, а2(х1, х2) = 0. Тогда в области К3 \
После перехода к новой независимой переменной т система (23) принимает вид
х1 = х2, х’2 = х3, х’3 = и. (24)
Таким образом, хотя исходная система в области К3 \ <0>не приводилась к регулярному каноническому виду, преобразованная система (24) оказывается системой регулярного канонического вида в той же области.
Рассмотрим условия, при которых система (17) с функцией з(х), имеющей вид (22), в некоторой окрестности данной точки х0 преобразуется к каноническому виду. Для этого достаточно выполнения следующих условий:
2) матрица управляемости и = (В, аёд В, аёА В) в точке х0 невырождена.
При выполнении первого условия, как показано, распределение span <В, adA В>инво-лютивно, так что будут выполнены условия 1-2 из разд. 1, достаточные для того, чтобы система (17) приводилась к регулярному каноническому виду. Отметим, что первое условие необходимо для выполнения второго, поэтому можно ограничиться выполнением лишь второго условия.
Учитывая вид векторных полей А, В, для системы (17) получаем
с(/1хз т— У2ж з fl) (а1Т + а2 /^2)2 ‘
Условие adJA В(х0) = 0 эквивалентно выполнению в точке х0 € П неравенства /1Х3 f2 —
— /2Х3 f1 = 0, что равносильно неравенству
а также выполнению неравенства с(х0,х2) = 0 и одного из неравенств а1 (х0) = 0, а2(х0) = 0. Зададим
с = с(х2), а1 = 1, а2 = 0,
тогда 5(х) = —. Рассмотрим множество О3 с П, на котором функция з(х) не имеет л
неустранимых особенностей. На этом множестве
не является вырожденной в каждой точке х0, в которой к(х0) = 0 и
Итак, если для системы (14) функции Т и Т2 в точке х0 одновременно не обращаются в нуль и также верно условие (25), то можно подобрать такую замену времени Т = з(х), что преобразованная система приводится к регулярному каноническому виду. Например, если /1(х0) = 0, то достаточно выбрать масштабирование времени з(х) в виде (22), где а1 = 1, а2 = 0, а с — произвольная функция, зависящая только от переменной х2 и удовлетворяющая условиям с(х°) = 0, с'(х°) = 0.
Доказано, что при использовании интегрируемых замен независимой переменной (времени), аффинная система не приводится к каноническому виду. Получен вид масштабирующей функции, задающей неинтегрируемую замену независимой переменной, после выполнения которой аффинная система третьего порядка со скалярным управлением приводится к регулярному каноническому виду.
Работа выполнена при поддержке РФФИ (гранты 11-01-00733,12-01-31303)и Программы Президента РФ по поддержке ведущих научных школ (проект НШ-3659.2012.1).
1. Краснощеченко В.И., Крищенко А.П. Нелинейные системы: геометрические методы анализа и синтеза. М.: Изд-во МГТУ им. Н. Э. Баумана, 2005. 520 с.
2. Sampei M., Furuta K. On Time Scaling for Nonlinear Systems: Application to Linearization // IEEE Trans. Autom. Control. 1986. Vol. 31, no. 5. P. 459-462. DOI: 10.1109/TAC. 1986.1104290.
3. Respondek W. Orbital Feedback Linearization of Single-Input Nonlinear Control Systems // Proceedings of IFAC NOLCOS’98. Enschede, The Netherlands, 1998. P. 499-504.
4. Guay M. An Algorithm for Orbital Feedback Linearization of Single-Input Nonlinear Affine Systems // Systems Control Letters. 1999. Vol. 38, no. 4-5. P. 271-281.
5. Fang B., Kalker G. Exact Linearization of Nonlinear Systems by Time Scale Transformation // Proceedings of the 2003 American Control Conference, 4-6 June 2003, Denver, Colorado, USA. IEEE, 2003. Vol. 4. P. 3555-3560. DOI: 10.1109/ACC.2003.1244097.
6. Guay M. Orbital Feedback Linearization of Multi-Input Control Affine Systems // Proceedings of the 2001 American Control Conference, 25-27 June 2001, Arlington, VA, USA. IEEE, 2001. Vol. 5. P. 3630-3635. DOI: 10.1109/ACC.2001.946198.
7. Kiss B., Szadecky-Kardoss E. On-Line Time-Scaling Control of a Kinematic Car with One Input // Proceedings of the 15-th Miditerranean Conference on Control and Automation. MED’07, 27-29 July 2007, Athens, Greece. IEEE, 2007. P. 1-6. DOI: 10.1109/MED. 2007.4433947.
8. De Luca A., Oriolo G., Samson C. Feedback control of a nonholonomic car-like robot // In: Robot Motion Planning and Control / J.-P. Laumond (ed.). Springer, 1998. P. 171-253. (Ser. Lecture Notes in Control and Information Sciences; vol. 229). DOI: 10.1007/BFb0036073.
9. ГилимьяновР.Ф., Пестерев А.В., Рапопорт Л.Б. Управление движением колесного робота в задаче следования вдоль криволинейного пути // Известия РАН. Теория и системы управления. 2008. Т. 47, №6. С. 158-165.
10. Hoffner K., Guay M. Geometries of Single-Input Locally Accessible Control Systems // Proceedings of the American Control Conference. ACC’09, 10-12 June 2009, St. Louis, MO. IEEE, 2009. P. 1480-1484. DOI: 10.1109/ACC.2009.5160678.
11. Пестерев A.B. Синтез стабилизирующего управления в задаче следования колесного робота вдоль заданного пути // Автоматика и телемеханика. 2012. № 7. С. 25-39.
12. Respondek W., Pogromsky A., Nijmeijer H. Time Scaling for Observer Design with Linearizable Error Dynamics // Automatica. 2004. Vol. 40, no. 2. P. 277-285.
13. Wang Y., Lynch A. Multiple Time Scaling of a Multi-Output Observer Form // IEEE Trans. Autom. Control. 2010. Vol. 55, iss.4. P. 966-971. DOI: 10.1109/TAC.2010.2041616.
14. Rouchon P., Fliess M., Levine J. Flatness, Motion Planning and Trailers Systems //Proceedings of the 32nd IEEE Conf. on Decision and Control, 15-17 December 1993, San Antonio, USA. IEEE, 1993. Vol. 3. P. 2700-2705. DOI: 10.1109/CDC.1993.325686.
SCIENTIFIC PERIODICAL OF THE BAUMAN MSTU
SCIENCE and EDUCATION
EL № FS77 — 48211. №0421200025. ISSN 1994-0408
electronic scientific and technical journal
Affine system transformations to the canonical form
using change of the independent variable
Bauman Moscow State Technical University 105005, Moscow, Russian Federation kasatkina_t_s@mail.ru
Change of the independent variable (time-scaling) gives an additional degree of freedom for equivalence conversions of dynamical systems. Affine system transformation to the canonical form is a standard technique in the design of nonlinear control systems. In this paper transformations of a stationary affine system to the canonical form, using time-scaling, were investigated. Integratable and non-integratable changes of the independent variable were considered. It was shown, that the affine system can’t be transformed to the canonical form using integratable time-scaling. Conditions of the possibility of transformation to the regular canonical form using non-integratable time scaling were obtained for single-input affine systems of the third order.
1. Krasnosh’echenko V.I., Krishchenko A.P. Neline’nye systemy: geometricheskie metodianaliza i sinteza [Nonlinear Systems: geometrical methods of analyses and synthesis]. Moscow, Bauman MSTU Publ., 2005. 520 p.
2. Sampei M., Furuta K. On Time Scaling for Nonlinear Systems: Application to Linearization. IEEE Trans. Autom. Control, 1986, vol. 31, no. 5, pp. 459-462. DOI: 10.1109/TAC. 1986.1104290.
3. Respondek W. Orbital Feedback Linearization of Single-Input Nonlinear Control Systems. Proceedings of IFAC NOLCOS’98. Enschede, The Netherlands, 1998, pp. 499-504.
4. Guay M. An Algorithm for Orbital Feedback Linearization of Single-Input Nonlinear Affine Systems. Systems Control Letters, 1999, vol. 38, no. 4-5, pp. 271-281.
5. Fang B., Kalker G. Exact Linearization of Nonlinear Systems by Time Scale Transformation. Proceedings of the 2003 American Control Conference, 4-6 June 2003, Denver, Colorado, USA. IEEE, 2003, vol. 4, pp. 3555-3560. DOI: 10.1109/ACC.2003.1244097.
6. Guay M. Orbital Feedback Linearization of Multi-Input Control Affine Systems. Proceedings of the 2001 American Control Conference, 25-27 June 2001, Arlington, VA, USA. IEEE, 2001, vol. 5, pp. 3630-3635. DOI: 10.1109/ACC.2001.946198
7. Kiss B., Szadecky-Kardoss E. On-Line Time-Scaling Control of a Kinematic Car with One Input. Proceedings of the Miditerranean Conference on Control and Automation. MED’07, 27-29 July 2007, Athens, Greece. IEEE, 2007, pp. 1-6. DOI: 10.1109/MED.2007.4433947.
8. De Luca A., Oriolo G., Samson C. Feedback control of a nonholonomic car-like robot. In: Laumond J.-P. (ed.). Robot Motion Planning and Control. Springer, 1998, pp. 171-253. (Ser. Lecture Notes in Control and Information Sciences; vol. 229). DOI: 10.1007/BFb0036073.
9. Gilim’anov R.F., Pesterev A.V., Rapoport L.B. Upravlinie dvizheniem kolesnogo robota v zadache sledovania vdol’ krivolineinogo puti [Motion Planning in the Tracking Problem]. Izvestia RAN. Ser Teoria I systemu upravlenia [Journal of Russian Academy Science. Ser. Control Systems and Theory], 2008, vol. 47, no. 6, pp. 158-165.
10. Hoffner K., Guay M. Geometries of Single-Input Locally Accessible Control Systems. Proceedings of the American Control Conference. ACC’09, 10-12 June 2009, St. Louis, MO. IEEE, 2009, pp. 1480-1484. DOI: 10.1109/ACC.2009.5160678.
11. Pesterev A.V. Sintez stabiliziruyuch’ego upravlenya v zadache sledovan’ya kolesnogo robota vdol’ zadannogo puty [Synthesis of a stabilizing control for a wheeled robot following a curvilinear path]. Avtomatika I telemehanika, 2012, no. 7, pp. 25-39. (Trans. version: Automation and Remote Control, 2012, vol. 73, iss. 7, pp. 1134-1144. DOI: 10.1134/S000511791207003X.)
12. Respondek W., Pogromsky A., Nijmeijer H. Time Scaling for Observer Design with Lineariz-able Error Dynamics. Automatica, 2004, vol. 40, no. 2, pp. 277-285.
13. Wang Y., Lynch A. Multiple Time Scaling of a Multi-Output Observer Form. IEEE Trans. Autom. Control, 2010, vol. 55, iss. 4, pp. 966-971. DOI: 10.1109/TAC.2010.2041616.
14. Rouchon P., Fliess M., Levine J. Flatness, Motion Planning and Trailers Systems. Proceedings of the 32nd IEEE Conf. on Decision and Control, 15-17 December 1993, San Antonio, USA. IEEE, 1993, vol. 3, pp. 2700-2705. DOI: 10.1109/CDC.1993.325686.
Приведение кривой второго порядка к каноническому виду
Пример №1 . Привести уравнение второго порядка к каноническому виду с помощью поворота и параллельного переноса осей координат. Построить кривую.
Пример №2 . Выполнив последовательно преобразования координат: поворот, а затем параллельный перенос координатных осей, преобразовать к каноническому виду уравнение кривой второго порядка и построить ее в исходной системе координат, а также найти параметры кривой.
Алгоритм перехода кривой второго порядка к каноническому виду

Пример №1 . 4y=-6-sqrt(4x-x 2 )
sqrt(4x-x 2 ) = -(4y+6)
Возведем в квадрат
4x-x 2 = (4y+6) 2
Раскрывая скобки, получаем:
16y 2 +48y + 36 +x 2 -4x = 0
Далее решается калькулятором. Если самостоятельно решать, то получим:
4x-x 2 = (4y+6) 2
-(x 2 — 4x) = 2(y+3/2) 2
-(x 2 — 4x + 4) = (y+3/2) 2
-(x — 2) 2 = (y+3/2) 2
(y+3/2) 2 + (x — 2) 2 = 0
Пример №2 . x=1-2/3 sqrt(y 2 -4y-5)
Здесь надо сначала привести к нормальному виду.
3/2(x-1)=sqrt(y 2 -4y-5)
Возводим в квадрат
9/4(x-1) 2 =y 2 -4y-5
9/4x 2 -9/4*2x+9/4-y 2 +4y+5=0
9/4x 2 -9/2x-y 2 +4y+29/4=0
Далее можно решать как с калькулятором, так и без него:
9/4(x-1) 2 =y 2 -4y-5
9/4(x-1) 2 =y 2 -4y+4-4-5
9/4(x-1) 2 =(y 2 -2)-9
9/4(x-1) 2 -(y 2 -2) = -9
-1/4(x-1) 2 +1/9(y 2 -2) = 1
http://cyberleninka.ru/article/n/preobrazovaniya-affinnyh-sistem-k-kanonicheskomu-vidu-s-ispolzovaniem-zamen-nezavisimoy-peremennoy
http://math.semestr.ru/line/curve.php