Техническая механика
Динамика системы материальных точек
Уравнение поступательного движения твердого тела
Механической системой материальных точек называется совокупность материальных точек, каким-то образом связанных межу собой.
Всякое твердое тело можно считать неизменяемой механической системой материальных точек. Силы взаимодействия точке данной системы называются внутренними силами; силы, с которыми действуют на данную систему другие точки, не входящие в эту систему, — внешними.
Пусть твердое тело массой m движется под действием силы F поступательно с ускорением а (рис. 1) .

Разобьем тело на ряд материальных точек с массами m1 и применим принцип Даламбера, не забывая при этом, что внутренние силы в уравнение равновесия не входят, так как на основании третьего закона Ньютона их сумма для системы в целом равна нулю.
В каждой материальной точке приложим силу инерции Fi ин = — mia и составим уравнение равновесия:
ΣX = 0 ; F – ΣFi ин = 0 ,
Так как при поступательном движении все точки тела имеют одинаковые ускорения, то а можно вынести за знак суммы, т. е.
Согласно второму закону Ньютона векторы силы F и ускорения а совпадают по направлению, поэтому можно записать:
Это и есть уравнение поступательного движения твердого тела. Очевидно, что это уравнение ничем не отличается от основного уравнения динамики точки, следовательно, все формулы динамики точки применимы для тела, движущегося поступательно.
Уравнение вращательного движения твердого тела
Пусть твердое тело под действием системы сил вращается вокруг неподвижной оси z с угловым ускорением α (рис. 2) .

Разобьем тело на ряд материальных точек с массами mi и применим, как и в предыдущем случае, принцип Даламбера (Д’Аламбера).
К каждой материальной точке приложены касательная и нормальная силы инерции. Составим уравнение равновесия:
Моменты реакций подшипника и подпятника, а также сил Fτi ин относительно оси z равны нулю, так как линии действия этих сил пересекают ось; сумма моментов внешних сил относительно оси вращения называется вращающим моментом .
Тогда
Выражение Σ(miri 2 ) называют моментом инерции тела относительно оси и обозначают J :
Момент инерции тела относительно оси есть сумма произведений масс материальных точек, составляющих это тело, на квадрат расстояния от них до этой оси.
В результате получим формулу:
которая называется уравнением вращательного движения твердого тела. В этой формуле J – момент инерции тела относительно оси вращения.
Единица момента инерции — [J] = [mr 2 ] = [m][r 2 ] = кг×м 2 .
Момент инерции играет во вращательном движении такую же роль, какую масса играет в поступательном движении, т. е. момент инерции есть мера инертности вращающегося тела.
В качестве примера определим момент инерции тонкого однородного сплошного диска, радиус которого R , толщина s , масса m , относительно оси, перпендикулярной плоскости диска и проходящей через его центр О (см. рис 3) .

Разобьем диск на элементарные кольца переменного радиуса r , шириной dr и толщиной s . Согласно определению момент инерции такого кольца равен
dJ = dΣ(mir 2 ) = r 2 dΣmi = r 2 dm = r 2 2πr drsρ = 2πsρ r 3 dr ,
где ρ – плотность материала диска.
Просуммировав моменты инерции всех элементарных колец, получим момент инерции всего диска:
J = ∫ 2πsρ r 3 dr = 2πsρ ∫ r 3 dr = 2πsρ r 4 /4 = πsρ r 4 /2 .
Так как масса диска m = πr 2 sρ , то можно записать: J = mR 2 /2 .
Нетрудно понять, что момент инерции однородного сплошного прямоугольного кругового цилиндра радиусом R и массой m любой высоты определяют по такой же формуле. Чтобы убедиться в этом, достаточно мысленно разбить цилиндр плоскостями, параллельными основанию на тонкие диски, и просуммировать моменты инерции всех дисков.
Моменты инерции тел вращения
На основе теоретических выкладок, изложенных выше, мы установили, что момент инерции круглого диска и цилиндрического тела можно определить по формуле
Аналогичные формулы можно вывести для определения моментов инерции других геометрических тел, наиболее часто встречающихся при расчетах и решении задач технической механики.
Моменты инерции для некоторых других однородных тел можно определить по формулам, которые приводятся здесь без вывода.
Шар массой m , радиусом R относительно диаметра:
Тонкий стержень массой m , длиной l относительно оси, проходящей перпендикулярно стержню через его конец:
Тонкая сферическая оболочка массой m , радиусом R относительно диаметра:
Пустотелый вал массой m , наружным радиусом R и радиусом отверстия r относительно оси:
Момент инерции Jz тела относительно какой-либо оси z , параллельной центральной (т. е. проходящей через центр тяжести С тела), равен сумме центрального момента инерции Jc и произведения массы m тела на квадрат расстояния а между этими осями:
Из этой формулы (ее вывод здесь не приводится) следует, что из всех моментов инерции тела относительно параллельных осей наименьшим будет момент инерции относительно центральной оси , т. е. центральный момент инерции.
Иногда момент инерции определяют по формуле: J = mrи 2 , где rи – радиус инерции тела :
Физический смысл радиуса инерции следующий: если массу тела сосредоточить в одной точке (такая масса называется приведенной) и поместить ее от оси вращения на расстоянии, равном радиусу инерции, то момент инерции приведенной массы будет равен моменту инерции данного тела относительно той же оси.
Удвоенный радиус инерции тела называется диаметром инерции : Dи = 2rи .
В практике иногда вместо момента инерции пользуются понятием махового момента GDи 2 .
Маховым моментом называется произведение силы тяжести G вращающегося тела на квадрат его диаметра инерции.
Единица махового момента — Н×м 2 .
Между маховым моментом и моментом инерции существует простая зависимость:
GDи 2 = 4g J = 39,24 J .
Кинетическая энергия твердого тела
Кинетическая энергия твердого тела равна сумме кинетических энергий материальных точек, составляющих данное тело:
Определим выражения для кинетической энергии твердого тела для трех случаев движения.
Тело движется поступательно
Учитывая, что при поступательном движении тела все его точки имеют одинаковую траекторию и одинаковые скорости, можно записать:
Следовательно, при поступательном движении твердого тела его кинетическая энергия вычисляется по той же формуле, что и кинетическая энергия материальной точки.
Тело вращается вокруг неподвижной оси
Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
Тело движется плоскопараллельно
Как известно из кинематики, сложное плоскопараллельное движение твердого тела в каждый данный момент времени можно считать простейшим вращательным движением вокруг мгновенной оси (метод мгновенных центров скоростей) .
 Допустим, что известна скорость vс центра тяжести тела, тогда мгновенная угловая скорость
Допустим, что известна скорость vс центра тяжести тела, тогда мгновенная угловая скорость
где ОС – расстояние центра тяжести С тела от мгновенной оси вращения О .
Момент инерции Jо относительно мгновенной оси вращения определяют по формуле:
где Jс — момент инерции относительно центральной оси или центральный момент инерции.
Кинетическую энергию тела, движущегося плоскопараллельно, определяют следующим образом:
Кпп = Jоω 2 /2 = (Jс + mОС 2 ) ω 2 /2 = (Jсω 2 )/2 + mOC 2 /2×vс 2 /ОС 2 ,
Кинетическая энергия твердого тела, движущегося плоскопараллельно, равна сумме кинетических энергий в поступательном движении вместе с центром тяжести и вращательном движении вокруг центральной оси, перпендикулярной основной плоскости.
В заключение сформулируем теорему об изменении кинетической энергии системы тел:
Изменение кинетической энергии системы тел при некотором перемещении равно алгебраической сумме работ всех внешних (активных и реактивных) и внутренних сил, действовавших на систему при указанном перемещении:
Кинетическая энергия системы тел равна сумме кинетических энергий каждого тела в отдельности.
Если тело твердое, то сумма работ его внутренних сил равна нулю. При некоторых связях, называемых идеальными, работа реактивных сил тоже будет равна нулю.
Поступательное движение твердого тела в теоретической механике
Содержание:
Поступательное движение твердого тела:
До сих пор мы изучали движения одной материальной точки. Перейдем теперь к изучению движения твердого тела. Начнем с изучения простого вида движения тела—поступательного, а затем рассмотрим более сложные виды его движений.
Движение тела называется поступательным, если любая прямая, неизменно связанная с телом, перемещается параллельно самой себе. Примерами поступательного движения тела могут служить движение кузова вагона на прямолинейном участке пути, движение поршня внутри цилиндра и пр.
Пусть тело А (рис. 160) движется поступательно.
Возьмем две любые точки твердого тела 
Выразим скорости  точек
точек  по формуле (72):
по формуле (72):
Но так как  , то
, то

 в силу того, что
в силу того, что 
Отсюда следует, что при поступательном движении тела все его точки описывают конгруэнтные кривые, имеют равные скорости, а следовательно, и равные ускорения.
Поэтому, изучение поступательного движения тела может быть сведено к изучению движения одной его какой-либо точки. Следовательно, все выводы, полученные при исследовании движения одной точки, могут быть распространены на случай поступательного движения тела.
Задача:
Клавиша соломотряса АВ соединена шарнирно в точках А и В с одинаковыми кривошипами OA и  делающими вокруг осей
делающими вокруг осей  постоянное число оборотов
постоянное число оборотов  240 об/мин (рис. 161).
240 об/мин (рис. 161).
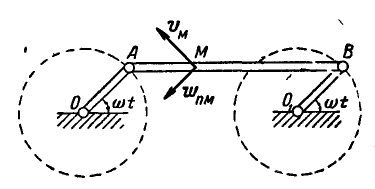
Определить скорость и ускорение любой точки М клавиши, если  .
.
Решение. При равенстве длин кривошипов и одинаковом числе их оборотов клавиша АВ движется поступательно, а поэтому точка М движется тождественно с точками А и В. Скорость и ускорение точки А находим по формулам (89) и (91):

но так как по формуле (94):

Скорость и ускорение точки М, равные скорости и ускорению точки А, показаны на рисунке 161.
Поступательное движение твердого тела
Поступательным движением называют такое движение твердого тела, при котором любая прямая, взятая в теле, остается параллельной своему начальному направлению
Поступательное движение тела и его уравнение
Наиболее простым движением твердого тела является поступательное движение. Соединим две какие-либо точки тела отрезком прямой. При поступательном движении тела этот прямолинейный отрезок передвигается параллельно самому себе, не изменяя своего направления. Движение тела называют поступательным, если каждая проведенная в теле прямая сохраняет свое направление.
Для выяснения вопроса, является ли данное движение поступательным, нет необходимости проводить в теле множество прямых и проверять, не меняет ли . каждая из них своего направления во время движения тела. Движение тела вполне определяется движением трех его точек, не лежащих на одной прямой. Следовательно, нужно провести минимум две прямые; конечно, эти прямые должны быть непараллельны между собой.
Из определения видно, что поступательное движение может совершать только тело. Одна точка не может двигаться поступательно. Вместе с тем поступательное движение твердого тела вполне характеризуется движением любой из его точек.
Если тело движется поступательно, то все его точки описывают одинаковые траектории.
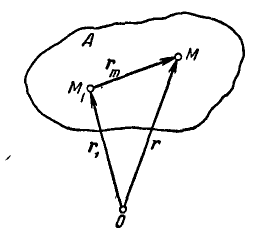
Пусть некоторое тело совершает поступательное движение относительно системы координат хОуz (рис. 97, а), которую мы примем за неподвижную и будем называть основной системой отсчета. Отметим в этом теле какую-либо точку Е, движущуюся вместе с телом. Не обращая пока внимания на прочие точки тела, рассмотрим движение точки Е, которое, как движение всякой точки, определяется уравнениями
Давая аргументу t последовательные значения, получим положения точки Е, геометрическое место которых является ее траекторией. На рис. 97 траектория не изображена.
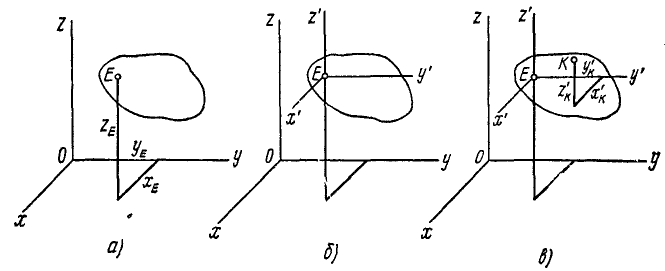
Рис. 97
Проведем теперь в теле через E три взаимно перпендикулярные оси (рис. 97, б), которые назовем подвижной системой отсчета, или подвижными осями координат. Для простоты доказательства в этом параграфе подвижные оси взяты параллельными неподвижным. Подвижные оси передвигаются вместе с телом относительно основных осей, оставаясь им параллельными, по условию поступательного движения.
Отметим в теле какую-либо другую точку К (рис. 97, в), координаты которой относительно подвижных осей обозначим x’κ, y’κ и z’, а относительно основных:
Обратим внимание на то, что координаты x’K, y’K и z’K точки К относительно подвижных осей постоянны, потому что и точка К и подвижные оси взяты в одном и том же твердом теле. Следовательно, при всяком положении поступательно движущегося тела координаты точек E и K отличаются друг от друга на постоянные величины. Отсюда следует, что траектории точек E и К одинаковы и одинаково ориентированы относительно основной системы координат xОyz. Поскольку точки выбраны нами произвольно, доказанное относится к любым точкам тела.
Если определять движение тела по движению его точек, то можно определить поступательное движение тела как движение, при котором перемещения всех точек тела за один и тот же произвольно выбранный промежуток времени равны между собой.
Именно поэтому поступательное движение иногда различают по траекториям, описываемым точками тела. Так, например, говорят, что спарник паровой машины, установленной на фундаменте, совершает круговое поступательное движение; это означает, что все точки спарника описывают одинаковые окружности. Говорят, например, что поршень совершает прямолинейное поступательное движение; это означает, что все точки поршня описывают одинаковые и параллельные прямолинейные траектории.
Задача:
Определить движение спарника тепловоза на прямолинейном участке пути.
Решение. Спарник AB (рис. 98) — это стержень, соединенный шарнирами А и В с кривошипами OA и O1B равной длины. Длина спарника равна расстоянию между осями О и O1. Такой механизм O1OAB называют шарнирным параллелограммом. Противоположные звенья его, как противоположные стороны всякого параллелограмма, параллельны между собой: AB ∣∣ OO1.
При заданном движении тепловоза точки О и O1 движутся прямолинейно и прямая AB не меняет своего направления, т. е. движется поступательно. (При повороте тепловоза или при изменении уклона железнодорожного пути поступательное движение нарушается.) Все точки спарника описывают одинаковые траектории — укороченные циклоиды.
Ответ. Движение спарника AB поступательное.
Задача:
Круг l радиуса r1 (рис. 99, а) движется поступательно, постоянно соприкасаясь с неподвижным кругом ll радиуса r2. Найти траекторию любой точки круга l.
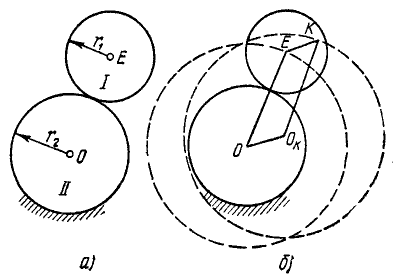
Рис. 99
Решение. Возьмем на подвижном круге l произвольную точку К и соединим с ней центр E подвижного круга отрезком EK (рис. 99, б). От центра О неподвижного круга ll отложим отрезок При поступательном движении круга l отрезок EK, как всякая прямая, проведенная в поступательно движущемся теле, не меняет своего направления и остается равным и параллельным неподвижному отрезку OOK. Соединив точку О с точкой Е, а точку ОK — с точкой К, получим параллелограмм KE00K, в котором
Следовательно, при поступательном движении круга l по кругу ll точка К движется, оставаясь на постоянном расстоянии r1 + r2 от неподвижной точки ОK, т. е. описывает окружность.
Ответ. Точки круга l описывают окружности радиуса r1 + r2.
Задать движение тела — это значит дать положение всех его точек для каждого мгновения. Мы видим, что при поступательном движении твердого тела все его точки движутся одинаково и движение всего тела вполне характеризуется движением какой-либо из его точек. Следовательно, уравнения движения точки E являются одновременно и уравнениями поступательного движения тела.
Часто даже в тех случаях, когда движущееся тело не является твердым, пренебрегают движением некоторых его частей по отношению к другим частям и рассматривают движение системы как по ступательное движение абсолютно твердого тела. Например, движение поезда иногда принимают за поступательное, пренебрегая вращением колес, движениями частей машины и т. п.
Если тело движется поступательно, то все его точки имеют одинаковые скорости
Скорости точек поступательно движущегося тела
Чтобы определить проекции скорости произвольной точки К поступательно движущегося тела на неподвижные оси координат, продифференцируем по времени уравнения (79), помня, что xκ, ук и z’κ постоянны. Найдем
Отсюда следует, что равны и полные скорости (64), и направляющие косинусы (62), иными словами, что равны векторы скоростей точек E и К:
 (80 / )
(80 / )
Поскольку эти точки взяты произвольно, доказанное относится к любым точкам тела, а потому во всякое мгновение скорости всех точек поступательно движущегося тела одинаковы.
Одинаковость скоростей не следует понимать как их постоянство, как неизменяемость во времени. Если тело движется поступательно, то в данное мгновение скорости всех точек тела одинаковы; с течением же времени скорости могут измениться. Но если изменится скорость одной точки, то на столько же изменятся скорости всех других точек тела, и они опять-таки останутся одинаковыми.
Одинаковость скоростей всех точек тела — необходимый, но недостаточный признак поступательного движения тела.
Может оказаться, что в какое-либо мгновение скорости всех точек тела одинаковы, но в следующее мгновение они различны. Так, например, движение шатуна AB кривошипно-ползунного механизма не является поступательным, но при некоторых положениях механизма (рис. 100) скорости всех его точек одинаковы.
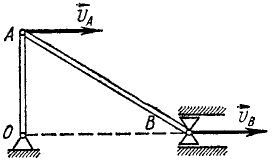
Рис. 100
Если тело движется поступательно, то все его точки имеют одинаковые ускорения
Ускорения точек поступательно движущегося тела
Продифференцировав по времени (80), найдем
откуда следует, что равны векторы ускорений обеих точек:
 (81′)
(81′)
Траектории точек K и E одинаковы и одинаково расположены, а потому к написанным равенствам надо присоединить еще следующие:
aKT = aET и aKN=aEN
Во всякое мгновение ускорения всех точек поступательно движущегося тела одинаковы. В этой теореме, как и в предыдущей, одинаковость не надо понимать как неизменяемость с течением времени.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Вращение твердого тела вокруг неподвижной оси
- Сферическое движение твердого тела
- Плоско-параллельное движение твердого тела
- Движение твердого тела, имеющего неподвижную точку
- Момент силы относительно точки и относительно оси
- Теория пар, не лежащих в одной плоскости
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Лекция №3. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Основное уравнение динамики поступательного движения
Динамика − раздел механики, в котором изучается движение тел под действием приложенных сил. Основной задачей динамики является определение кинематического уравнения движения материальной точки, если известны, приложенные силы к ней со стороны окружающих тел и начальные условия, положение и скорость тела в начальный момент времени.
В основе динамики лежат три закона И. Ньютона, которые являются результатом обобщения опытных данных и теоретических сведений в области механики. Для формулировки законов динамики необходимо дать определение следующих динамических характеристик: инертность, масса, импульс тела и сила.
Инертностью (или инерцией ) называется свойство тела сохранить неизменным состояние покоя или равномерного прямолинейного движения. Количественной мерой инертности тел является инертная масса ), а количественной мерой гравитационного взаимодействия яв-ляется гравитационной массы . К настоящему времени экспериментально показано, что инертная и гравитационная массы с большой степенью точности совпадают, т. е. они эквивалентны. Этот фундаментальный закон природы называется принципом эквивалентности .
Масса − это физическая величина, являющаяся мерой инерционных и гравитационных свойств тела. Единицей массы в СИ является килограмм: [m] = кг . Масса − величина аддитивная, т. е. масса тела равна сумме масс всех частей этого тела.
Импульс тела (или количество движения ) − это векторная физическая величина, равная произведению массы тела на его скорость
Единица измерения импульса в СИ — $$ <[p]>= <кг×м \over c>$$ .
Сила − это векторная физическая величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате, которого тело деформируется или приобретает ускорение. Единица измерения силы в СИ − Ньютон $$ <[F]>= кг× <м \over c^2>=H$$ . Сила, приложенная к телу, считается заданной, если указаны ее точка приложения, направление действия и численное значение.
Первый закон Ньютона (или закон инерции ), который формулируется следующим образом: всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока действие со стороны других тел не выведут его из этого состояния. Система отсчета, в которой выполняется первый закон Ньютона, называется инерциальной . Рассмотрим две системы отсчета, двигающиеся друг относительно друга с некоторым ускорением. Если относительно одной из них тело покоится, то относительно другой оно будет двигаться с ускорением. Получается, что в одной системе отсчета первый закон Ньютона выполняется, а в другой не выполняется. Любая система отсчета, движущаяся относительно некоторой инерциальной системы прямолинейно и равномерно будет также инерциальной. Системы отсчета, по отношению к которым первый закон Ньютона не выполняется, называются неинерциальными системами отсчета.
Второй закон Ньютона : ускорение тела прямо пропорционально результирующей сил приложенных к нему и обратно пропорционально его массе.
Скорость изменения импульса материальной точки равна действующей на нее силе. Уравнения (2.1.2) и (2.1.3) являются математическим выражением второго закона Ньютона. Второй закон Ньютона позволяет решать основную задачу механики. Поэтому его называется основным уравнением динамики поступательного движения .
Третий закон Ньютона : сила, с которой одно тело действует на другое, равна по величине и противоположна по направлению силе, с которой второе тело действует на первое.
2.2. Преобразования Галилея. Механический принцип относительности
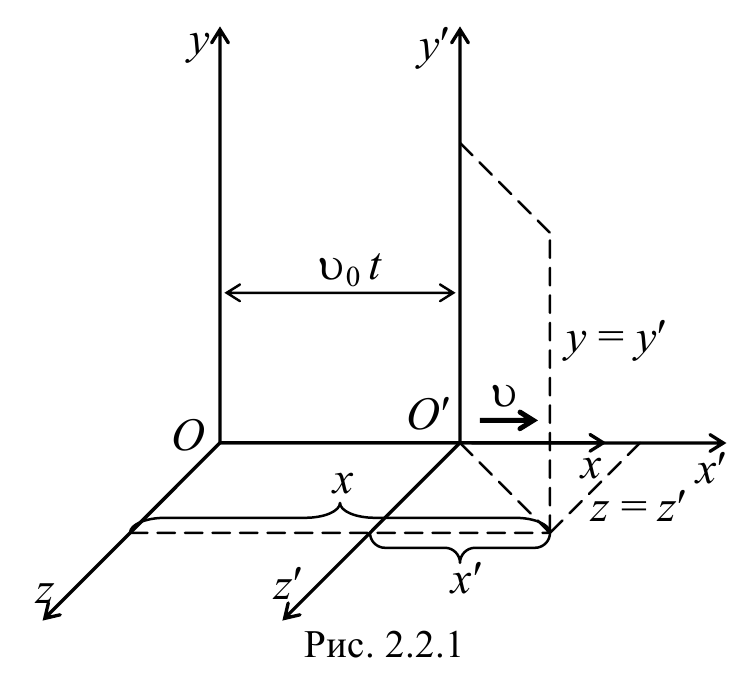
Рассмотрим две инерциальные системы XYZ (система К ) и X’Y’Z’ (система К’ ), первая из которых будет неподвижной, а вторая движется поступательно вдоль положительного направления оси 0X с постоянной скоростью υ0 . Найдем связь между координатами х, у, z некоторой точки M в системе К и координатами х’, у’, z’ . той же точки в системе К’ . Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то, как следует из рис. 2.2.1 в момент времени t координаты точки М в этих системах будут связаны соотношениями

Формулы (2.2.1) называются преобразованиями Галилея для координат и времени. Они могут быть представлены также в виде обратного преобразования:

Из преобразований Галилея вытекает классический закон сложения скоростей. Продифференцировав соотношения (2.2.2) по времени, найдем связь между скоростями точки М по отношению к системам отсчета К и К’

Согласно векторному соотношению (2.2.3) скорость υ точки М относительно неподвижной системы координат (абсолютная) равна векторной сумме ее скорости υ’ относительно подвижной системы (относительная) и скорости υ0 подвижной системы относительно неподвижной (переносная).
Продифференцировав выражение (2.2.3) по времени t , получим при условии, что υ0 = const

Отсюда следует, что ускорение какого-либо тела во всех системах отсчета, движущихся друг относительно друга прямолинейно и равномерно, оказывается одним и тем же. Поэтому, если одна из этих систем инерциальна, то и остальные будут инерциальными.
Так как масса в классической механике не зависит от скорости, то произведение массы тела на его ускорение во всех инерциальных системах будет одинаковым, т. е. вид второго закона Ньютона, описывающего движение тела, будет одинаковым во всех инерциальных системах отсчета. Неизменность выражения для закона Ньютона отражает тот факт, что все механические явления во всех инерциальных системах отсчета протекают одинаково при одинаковых условиях. Другими словами − все инерциальные системы отсчета эквивалентны между собой. Это утверждение носит название принципа относительности Галилея (или механический принцип относительности ). Он означает, что никакими опытами внутри инерциальной системы отсчета невозможно установить покоится эта система или движется равномерно и прямолинейно. Принцип относительности справедлив не только для механических, но и для любых физических явлений.
Используя преобразования Галилея, можно показать, что отрезки длин (масштабы) и интервалы времени между двумя какими-либо событиями одинаковы во всех инерциальных системах отсчета.

Понятие времени в классической механике является абсолютным, поэтому

Физические величины, не изменяющиеся при переходе от одной инерциальной системе к другой, называются инвариантными. Следовательно, отрезки длин и интервалы времени являются инвариантами классической механики.
2.3. Система материальных точек. Закон сохранения импульса
Механической системой называется совокупность материальных точек, рассматриваемых как единое целое. Силы взаимодействия между материальными точками механической системы называются внутренними . Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними . Механическая система тел, на которую не действуют внешние силы, называется замкнутой механической системой .
Импульс механической системы, представляет собой сумму импульсов всех материальных точек, входящих в механическую систему.
Рассмотрим систему материальных точек массами m1 , m2, …, mn , движущихся со скоростями υ1 , υ2 , …, υn . Пусть на каждую из этих точек действуют равнодействующие внутренних сил F 1 i , F 2 i , …, F n i , и равнодействующие внешних сил F 1 e , F 2 e , …, F n e .
Используя второй закон Ньютона для системы точек, запишем

Сложим эти уравнения:
Согласно третьему закону Ньютона, силы, действующие между материальными точками механической системы, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.

С учетом выражения (2.3.1) получим закон изменения импульса механической системы : производная по времени от импульса механической системы равна векторной сумме внешних сил, действующих на систему.
В случае замкнутой механической системы,

Выражение (2.3.6) выражает закон сохранения импульса: импульс замкнутой системы не изменяется с течением времени.
Закон сохранения импульса носит универсальный характер и выполняется также в релятивистской и квантовой механике. Закон сохранения импульса − это фундаментальный закон природы. Он является следствием определенного свойства симметрии пространства − его однородности. Под однородностью пространства понимают одинаковость свойств пространства во всех его точках.
2.4. Центр масс. Уравнение движения центра масс
В классической механике масса тела не зависит от его скорости движения, и импульс системы может быть выражен через скорость ее центра масс.
Центром масс (или центром инерции ) системы материальных точек называется воображаемая точка С , положение которой характеризует распределение массы этой системы, и радиус-вектор которой определяется выражением:
где mi и r i − масса и радиус-вектор i-ой точки системы; $$m = <\sum_
Соотношения координат центра инерции системы равны

В случае непрерывного распределения массы в системе (например, в случае протяженного тела) радиус-вектор центра масс системы определяется выражением
где r − радиус-вектор малого элемента системы, масса которого равна dm , а интегрирование проводится по всем элементам системы, т. е. по всей ее массе m .
Определим скорость центра масс механической системы

Учитывая выражение (2.3.1) получим
Таким образом, импульс механической системы равен произведению массы системы на скорость ее центра масс.
С учетом выражения (2.3.5) получим
Это выражение представляет собой закон движения центра масс : центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы, и на которую действует сила, равная векторной сумме всех внешних сил, приложенных к системе.
Закон движения центра масс показывает, что для изменения скорости центра масс системы необходимо, чтобы на систему действовала внешняя сила. Внутренние силы взаимодействия частей системы могут вызвать изменения скоростей этих частей, но они не могут повлиять на суммарный импульс системы и скорость ее центра масс.
http://www.evkova.org/postupatelnoe-dvizhenie-tverdogo-tela-v-teoreticheskoj-mehanike
http://physics.belstu.by/mechanics_lk/mechanics_lk3.html