П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: «устройство регулирования (черный ящик) обеспечивающие на своем выходе обратную связь регулируемого параметра, или его изменения, описываемую передаточной функцией типа П, ПИ и т.д. «. При этом:
- П, (P) — означает «пропорциональный»
- И(I) — «интегральный»
- Д(D) — «дифференциальный»
- ПИ (PI) — «пропорциональный и интегральный»
- ПД (PD) — «пропорциональный и дифференциальный»
- ПИД (PID) — «пропорциональный, интегральный и дифференциальный»
Очень важное замечание — в подавляющем большинстве случаев эти регуляторы обеспечивают отрицательную обратную связь изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u. Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют «ошибкой» или «отклонением», Х — «заданным уровнем» или «заданным значением», причем Х, в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы «верхний» контур регулирования был «медленным» по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора, как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
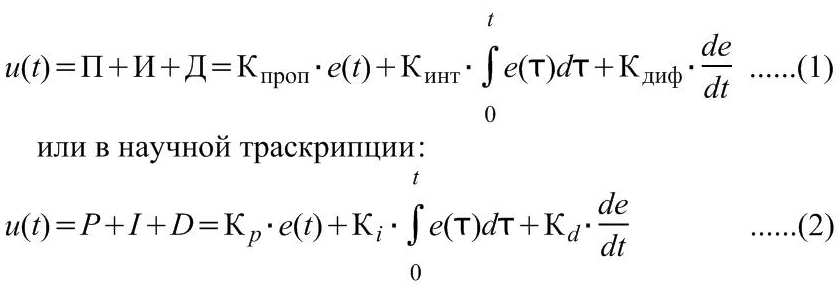
где «тау» — время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
- Kp — пропорциональный коэффициент усиления
- Pb=1/Kp — относительный диапазон регулирования
- Ki — интегральный коэффициент усиления
- Ti=1/Ki — постоянная интегрирования (размерность — время)
- Kd — дифференциальный коэффициент усиления
- Td=Kd — постоянная дифференицирования (размерность — время)
Очевидно, что функция содержит 3 слагаемых, первое — пропорциональное к изменению заданного параметра, второе — интегральное, а третье — дифференциальное . В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : — величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. Передаточная функция П (P) регулятора описывается уравнением: u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: — величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: — величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку — если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D (коэффициент Ki уравнения (2) равен нулю).
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
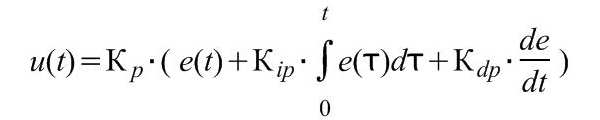
тут нет никакого подвоха, все то же самое, просто другая запись.
Характеристики автоматических регуляторов
| Закон | Дифференциальное уравнение | Передаточная функция | Передаточная характеристика | АФЧХ | Параметры настройки |
| П |  |  |  |  | |
| И |  |  |  |  |  |
| ПД |  |  | 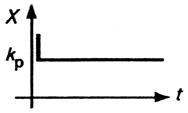 |  | ,  |
| ПИ |  |  | 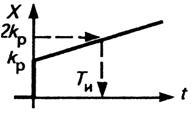 | 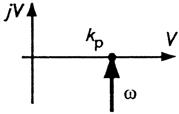 | ,  |
| ПИД |  |  | 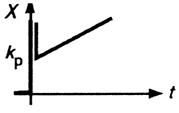 | 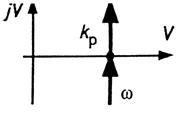 | , , |
Пропорциональный (П) регулятор. Он перемещает РО на значение x пропорциональное отклонению регулируемой величины у or заданною значения.
Дифференциальное уравнение регулятора (p означает запись в операторной форме)
Таким образом в динамическом отношении П-регулятор подобен безынерционному (пропорциональному) звену.
Параметр настройки П-регулятора — коэффициент пропорциональности  , равный перемещению РО x при отклонении регулируемой величины у на единицу ее изменения.
, равный перемещению РО x при отклонении регулируемой величины у на единицу ее изменения.
При выборе структурной схемы любого реального регулятора, в том числе и пропорционального, решающее значение имеет передаточная функция (ПФ) исполнительного механизма, которая может соответствовать ПФ интегрирующего или пропорционального звена. К первой группе относятся электродвигательные ИМ, обеспечивающие постоянную скорость перемещения РО, ко второй — пневматические мембранные ИМ, у которых перемещение РО пропорционально регулирующему воздействию.
Структурная схема П-регулятора с ИМ первого типа приведена на рисунке 4.2, а. Закон регулирования формируется с помощью отрицательной обратной связи (ОС) по положению РО, т. е. на вход устройства ОС  поступает сигнал x с преобразователя перемещения ИМ.
поступает сигнал x с преобразователя перемещения ИМ.
В соответствии с правилами преобразования структурных схем ПФ регулятора имеет вид

При большом коэффициенте усиления  ПФ упрощается
ПФ упрощается
Для того чтобы формула (4.1) была тождественна ПФ идеального П-регулятора  , необходимо выполнить условие
, необходимо выполнить условие  .
.
Таким образом, ОС должна быть выполнена в виде безынерционного звена с коэффициентом усиления  . Такую ОС называют жесткой. Соответственно, параметр настройки П-регулятора — коэффициент пропорциональности задается параметрами звена ОС.
. Такую ОС называют жесткой. Соответственно, параметр настройки П-регулятора — коэффициент пропорциональности задается параметрами звена ОС.
Переходная характеристика реального П-регулятора несколько отличается от характеристики идеального в начальной своей части из-за ограниченной скорости ИМ.
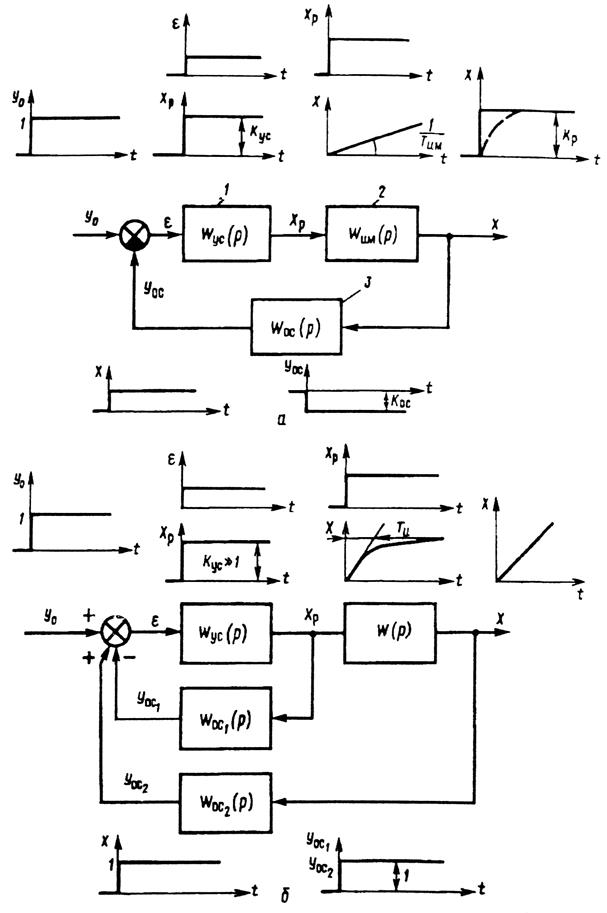
Рис. 4.2. Структурные схемы П-регулятора (а) и И-регулятора (б):
1 — усилитель; 2 — исполнительный механизм; 3 — цепь обратной связи
Пропорциональные регуляторы позволяют устойчиво работать практически в любых технологических системах. Однако их недостаток — зависимость регулируемой величины от нагрузки объектов.
Интегральный (И) регулятор. Он перемешает РО пропорционально интегралу от сигнала рассогласования,
Уравнение регулятора (в операторной форме)
Таким образом, в динамическом отношении И-регулятор подобен интегрирующему звену. Параметр настройки И-регулятора  — коэффициент пропорциональности — характеризует зависимость скорости перемещения регулирующего органа от значения отклонения регулируемого параметра.
— коэффициент пропорциональности — характеризует зависимость скорости перемещения регулирующего органа от значения отклонения регулируемого параметра.
Структурная схема серийного П-регулятора показана на рисунке 4.2, б. Передаточные функции элементов схемы определяются следующими выражениями
|

|
Передаточная функция всей схемы

После подстановки в формулу (4.3) значений ПФ из формулы (4.2). деления числителя и знаменателя на  и отбрасывания за малостью
и отбрасывания за малостью  получаем ПФ И-регулятора (
получаем ПФ И-регулятора (  — постоянная времени ИМ, величина, обратная )
— постоянная времени ИМ, величина, обратная )
И-регуляторы поддерживают параметр без его отклонений, однако могут устойчиво работать только на объектах, имеющих значительное самовыравнивание.
Пропорционально-дифференциальный (ПЛ) регулятор. Он перемещает РО на значение  пропорциональное сумме отклонения и скорости (дифференциала) отклонения регулируемой величины
пропорциональное сумме отклонения и скорости (дифференциала) отклонения регулируемой величины  .
.
Уравнение регулятора (в операторной форме)

Таким образом, в динамическом отношении ПД-регулятор подобен системе из двух параллельно включенных звеньев: безынерционного с коэффициентом пропорциональности и дифференциального с коэффициентом  .
.
Пропорционально-интегральный (ПИ) регулятор.Он перемещает РО на величину , пропорциональную сумме отклонения и интеграла от отклонения регулируемой величины у.
Уравнение регулятора (в операторной форме)
Таким образом, в динамическом отношении ПИ-регулятор подобен системе из двух параллельно включенных регуляторов: пропорционального с коэффициентом пропорциональности и интегрального с коэффициентом пропорциональности  Отсюда следует, что у ПИ-регулятора два параметра настройки: коэффициент пропорциональности и время удвоения . При этом , как следует из таблицы 2, может быть определено как время, за которое выходной сигнал регулятора изменяется от до
Отсюда следует, что у ПИ-регулятора два параметра настройки: коэффициент пропорциональности и время удвоения . При этом , как следует из таблицы 2, может быть определено как время, за которое выходной сигнал регулятора изменяется от до  т. е. удваивается.
т. е. удваивается.
Структурная схема ПИ-регулятора показана на рисунке 4.3 в двух вариантах: с охватом и без охвата ИМ отрицательной ОС.
В первом варианте (рис. 4.3, а) устройство ОС должно иметь характеристику реального дифференцирующего звена
 ,
,
где  и
и  — коэффициент усиления и постоянная времени дифференцирующего звена.
— коэффициент усиления и постоянная времени дифференцирующего звена.
Тогда, как было отмечено ранее, при достаточно большом коэффициенте усиления ПФ регулятора
 , или
, или  ,
,
если принять  и
и  .
.
Таким образом, в первом варианте исполнения регулятора ПФ исполнительного механизма не влияет на формирование закона регулирования, который полностью определяется характеристикой устройства ОС. В серийных ПИ-регуляторах этою типа в качестве ОС используют различные электрические, пневматические или гидравлические устройства — аналоги реально дифференцирующего звена. Такую ОС называют упругой или гибкой.
Во втором варианте исполнения ПИ-рсгулятора (рис. 4.3, б)
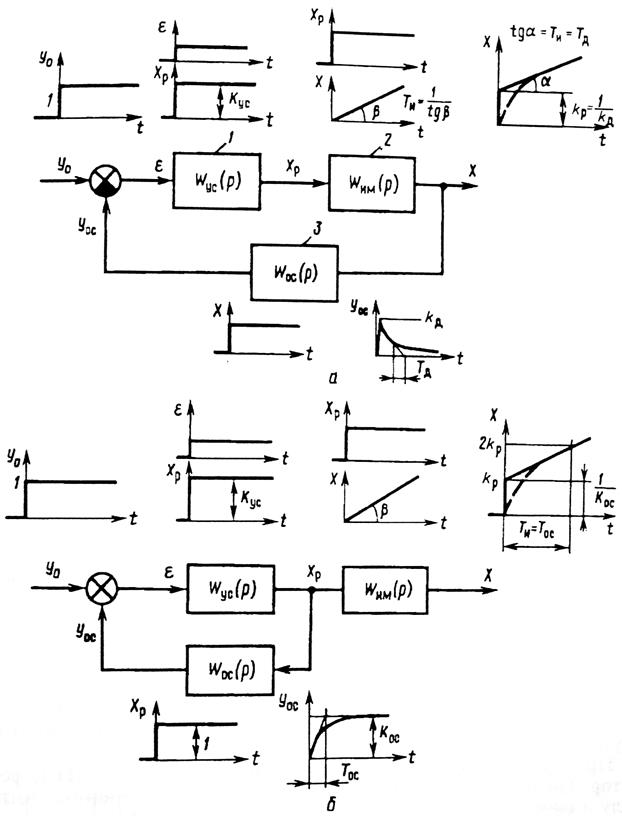
Рис. 4.3. Структурные схемы ПИ-регулятора с охватом (а) и без охвата (о) ИМ цепью отрицательной обратной связи:
1 — усилитель; 2 — исполнительный механизм; 3 — обратная связь
возможны два случая, когда исполнительный механизм имеет характеристику интегрирующего или пропорционального звена.
В обоих случаях при достаточно большом коэффициенте усиления имеем
 .
.
Если,  , а ОС выполнена в виде апериодического звена 1-го порядка
, а ОС выполнена в виде апериодического звена 1-го порядка  , то получаем ПФ ПИ-регулятора
, то получаем ПФ ПИ-регулятора

где оба параметра настройки  и
и  также определяются параметрами узла ОС.
также определяются параметрами узла ОС.
Если у ИМ характеристика пропорционального звена, то для реализации ПИ-регулятором закона регулирования звено ОС должно иметь характеристику реального дифференцирующего звена.
При увеличении постоянной времени такой ПИ-регулятор превращается в П-регулятор, а устройство ОС — в безынерционное звено.
В большинстве серийно выпускаемых электрических регуляторов, использующих ИМ с постоянной скоростью перемещения и имеющих структурную схему (рис. 4.3, б), в качестве второй ступени усиления используют трехпозиционный релейный элемент.
Такой принцип реализован в большом числе регуляторов, используемых в сельскохозяйственном производстве (Р-25, РС-29, РП-4 и др.).
ПИ-регуляторы, отличаясь простотой конструкции, обеспечивают высокое качество стабилизации параметра независимо от нагрузки объекта.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор.Он перемещает РО пропорционально отклонению, интегралу и скорости отклонения регулируемой величины.
Уравнение регулятора (в операторной форме)
 .
.
Таким образом, в динамическом отношении ПИД-регулятор подобен системе из трех параллельно включенных звеньев: пропорционального — с коэффициентом пропорциональности интегрального — с и дифференцирующего — .
Соответственно, у ПИД-регулятора параметров настройки три: коэффициент пропорциональности , время интегрирования , и время дифференцирования  .
.
На практике аналоговый ПИД-регулятор выполняют по той же структурной схеме, что и ПИ-регулятор (рис. 4.3, а), но устройство ОС  в этом случае должно иметь ПФ вида апериодического звена второго порядка. Обычно ПИД-закон регулирования реализуют путем включения последовательного корректирующего устройства в виде интегрально-дифференцирующего звена.
в этом случае должно иметь ПФ вида апериодического звена второго порядка. Обычно ПИД-закон регулирования реализуют путем включения последовательного корректирующего устройства в виде интегрально-дифференцирующего звена.
Позиционный (релейный) регулятор.Он вырабатывает сигнал, который перемещает РО в одно из фиксированных положений (позиций). Этих положений может быть два, три и более, соответственно различают двух-, трех- и многопозицонные регуляторы.
Уравнение автоматической системы регулирования с позиционным регулятором определяется статической характеристикой регулятора.
Статическая характеристика наиболее распространенного из этой группы регуляторов — двухпозиционного показана на рисунке 4.4, а.
Величина 2а определяет зону неоднозначности регулятора. При изменении входной величины у (она же — выходная величина объекта) относительно заданного значения на а выходная величина (регулирующее воздействие) скачком достигнет своего максимального значения  . При уменьшении на то же значение а выходная величина также скачком достигнет значения
. При уменьшении на то же значение а выходная величина также скачком достигнет значения  , причем в общем случае
, причем в общем случае  .
.
Таким образом, двухпозиционные регуляторы имеют два параметра настройки: зона неоднозначности 2а и регулирующее воздействие В.
Характерная особенность системы регулирования с двухпозиционным регулятором — автоколебательный характер изменения регулируемой величины  . Параметры автоколебаний — амплитуда
. Параметры автоколебаний — амплитуда  и период
и период  зависят от свойств объекта регулирования (
зависят от свойств объекта регулирования (  ,
,  ,
,  ) и параметров настройки регулятора.
) и параметров настройки регулятора.
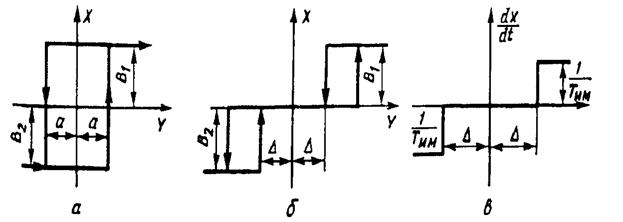
Рис. 4.4. Статические характеристики позиционных регуляторов (а. в)
Трехпозиционные регуляторы (рис. 4.4, б) в отличие от двухпозиционных кроме двух устойчивых положений — «больше» и «меньше» — обеспечивают еще и третье — «норма». Органы настройки трехпозиционного регулятора позволяют устанавливать зону нечувствительности  и значение регулирующего воздействия
и значение регулирующего воздействия  .
.
Преимущества трехпозиционного регулирования перед двухпозиционным заключаются в отсутствии автоколебаний при изменении  и малом значении амплитуды колебаний регулируемой величины.
и малом значении амплитуды колебаний регулируемой величины.
Позиционные регуляторы могут работать также и с ИМ, обеспечивающими постоянную скорость перемещения РО. Статическая характеристика такого регулятора приведена на рисунке 4.4, в. В соответствии с этой характеристикой скорость перемещения РО  изменяется скачкообразно, достигая значения
изменяется скачкообразно, достигая значения  где
где  — время полного хода ИМ.
— время полного хода ИМ.
Релейные регуляторы кроме зоны нечувствительности имеют также и зону неоднозначности.
Системы автоматического регулирования с позиционными регуляторами применяют при автоматизации ТП сельскохозяйственного производства. Это стало возможным благодаря таким их преимуществам, как простота технических способов управления энергетическими потоками, удобство сочетания релейного элемента с ИМ постоянной скорости, перемещающим РО, а также благодаря дешевизне, надежности и простоте настройки самих регулирующих устройств.
П-, ПИ-, ПД-, ПИД — регуляторы
В данном разделе приведены описания алгоритмов работы и законы регулирования непрерывных П-, ПИ-, ПД-, ПИД-регуляторов с различными структурами выходного сигнала — аналоговым выходом, дискретным (импульсным) выходом или ШИМ-выходом (широтно импульсным модулированным сигналом).
Типовые регуляторы и регулировочные характеристики
Д ля регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев (описание типовых звеньев представлено в разделе 2.4):
- П-регулятор, пропорциональный регулятор
Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y). - И-регулятор, интегрирующий регулятор
Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки. - Д-регулятор, дифференцирующий регулятор
ПередаточнаяфункцияД-регулятора: Wд(s) = К2*s. Д-регуляторгенерирует управляющее воздействие только при изменении регулируемой веричины: Y= K2 * dE/dt.
На практике данные простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (см. рис.1):
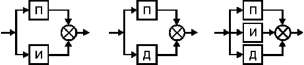
В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор).
- ПИ-регулятор, пропорционально-интегральный регулятор (см. рис.3.18.а)
ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора: Wпи(s) = K1 + K0/s. - ПД-регулятор, пропорционально-дифференциальный регулятор (см. рис.3.18.б)
ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора: Wпд(s) = K1 + K2 s. - ПИД-регулятор, пропорционально-интегрально-дифференциальный регулятор (см. рис.3.18.в)
ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s.
Наиболее часто используется ПИД-регулятор, поскольку он сочетает в себе достоинства всех трех типовых регуляторов.
Структурные схемы непрерывных регуляторов
В данном разделе приведены структурные схемы непрерывных регуляторов с аналоговым выходом -рис.2, с импульсным выходом — рис.3 и с ШИМ (широтно импульсным модулированным) выходом -рис.4.
В процессе работы система автоматического регулирования АР (регулятор) сравнивает текущее значение измеряемого параметра Х, полученного от датчика Д, с заданным значением (заданием SP) и устраняет рассогласование регулирования E (B=SP-PV). Внешние возмущающие воздействия Z также устраняются регулятором. Работа приведенных структурных схем отличается методом формирования выходного управляющего сигнала регулятора.
Непрерывный регулятор с аналоговым выходом
Структурная схема непрерывного регулятора с аналоговым выходом приведена на рис.2.
Выход Y регулятора АР (например, сигнал 0-20мА, 4-20мА, 0-5мА или 0-10В) воздействует через электропневматический преобразователь Е/Р сигналов (например, с выходным сигналом 20-100кПа) или электропневматический позиционный регулятор на исполнительный элемент К (регулирующий орган).
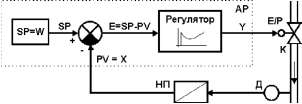
где:
АР — непрерывный ПИД-регулятор с аналоговым выходом,
SP — узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е — рассогласование регулятора,
Д — датчик,
НП — нормирующий преобразователь (в современных регуляторах является входным устройством)
Y — выходной аналоговый управляющий сигнал Е/Р — электропневматический преобразователь,
К — клапан регулирующий (регулирующий орган).
Непрерывный регулятор с импульсным выходом
Структурная схема непрерывного регулятора с импульсным выходом приведена на рис.3.
Выходные управляющие сигналы регулятора — сигналы Больше и Меньше (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
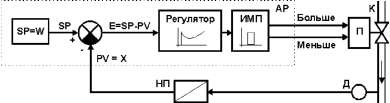
где:
АР — непрерывный ПИД-регулятор с импульсным выходом,
SP — узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е — рассогласование регулятора,
Д — датчик,
НП — нормирующий преобразователь (в современных регуляторах является входным устройством) ИМП — импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100. Сигналы Больше и Меньше — управляющие воздействия,
П — пускатель контактный или бесконтактный,
К — клапан регулирующий (регулирующий орган).
Непрерывный регулятор с ШИМ (широтно импульсным модулированным) выходом
Структурная схема непрерывного регулятора с ШИМ (широтно импульсным модулированным) выходом приведена на рис.4.
Выходной управляющий сигнал регулятора (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
Непрерывные регуляторы с ШИМ выходом широко применяются в системах регулирования температуры, где выходной управляющий симисторный элемент (или твердотельное реле, пускатель) воздействуют на термоэлектрический нагреватель ТЭН, или вентилятор.
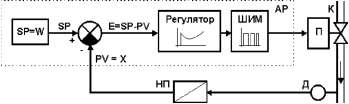
АР — непрерывный ПИД-регулятор с импульсным ШИМ выходом,
SP — узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е — рассогласование регулятора,
Д — датчик,
НП — нормирующий преобразователь (в современных регуляторах является входным устройством) ШИМ — импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100.
П — пускатель контактный или бесконтактный,
К — клапан регулирующий (регулирующий орган).
Согласование выходных устройств непрерывных регуляторов
В ыходной сигнал регулятора должен быть согласован с исполнительным механизмом и исполнительным устройством.
В соответствии с видом привода и исполнительным механизмом необходимо использовать выходное устройство непрерывного регулятора соответствующего типа, см. таблицу 1.
Таблица 1 — Согласование выходных устройств непрерывных регуляторов
| Выходное устройство непрерывного регулятора | Тип выходного устройства | Закон регулирования | Исполнительный механизм или устройство | Вид привода | Регулирующий орган |
|---|---|---|---|---|---|
| Аналоговый выход | ЦАП с выходом 0-5мА, 0-20мА, 4-20мА, 0-10В | П-, ПИ-,ПД-, ПИД-закон | Преобразователи и позиционные регуляторы электро-пневматические и гидравлические | Пневматические исполнительные приводы (с сжатым воздухом в качестве вспомогательной энергии) и электропневматические преобразователи сигналов или электропневматические позиционные регуляторы, электрические (частотные привода) | |
| Импульсный выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Электрические приводы (с редуктором), в т. ч. реверсивные | |
| ШИМ выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Термоэлектрический нагреватель(ТЭН) и др. |
Реакция регулятора на единичное ступенчатое воздействие
О дной из динамических характеристик обьекта управления является его переходная характеристика -реакция обьекта на единичное ступенчатое воздействие (см. Динамические характеристики), например, изменение заданной точки регулятора.
В данном разделе приведены переходные процессы системы управления при единичном ступенчатом изменении заданной точки при использовании регуляторов с различным законом регулирования.
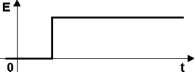
Если на вход регулятора подается скачкообразная функция изменения заданной точки — см. рис. 5, то на выходе регулятора возникает реакция на единичное ступенчатое воздействие в соответствии с характеристикой регулятора в функции времени.
П-регулятор, реакция на единичное ступенчатое воздействие
П араметрами П-регулятора являются коэффициент усиления Кр и рабочая точка Y0. Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулирования.
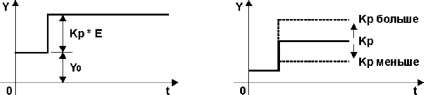
Рисунок 6 — П-регулятор. Реакция на единичное ступенчатое воздействие
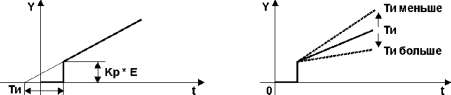
ПИ-регулятор, реакция на единичное ступенчатое воздействие
В отличие от П-регулятора у ПИ-регулятора, благодаря интегральной составляющей, исключается отклонение регулирования.
Параметром интегральной составляющей является время интегрирования Ти.
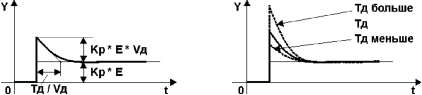
ПД-регулятор, реакция на единичное ступенчатое воздействие
У ПД-регуляторов пропорциональная составляющая накладывается на затухающую дифференциальную составляющую.
Д-составляющая определяется через усиление упреждения Уд и время дифференцирования Тд.
ПИД-регулятор, реакция на единичное ступенчатое воздействие
Б лагодаря дополнительному подключению Д-составляющей ПИД-регулятор достигает улучшения динамического качества регулирования.
http://helpiks.org/4-8899.html
http://automation-system.ru/main/15-regulyator/type-of-control/90-408-p-pi-pid.html