Статические и динамические характеристики электропривода
Вы будете перенаправлены на Автор24
Функциональная схема электрического привода
Электрический привод — это электромеханическая система, которая предназначена для приведения в движение рабочих органов механизмов и машин, а также управления их технологическим процессом.
Пример функциональной схема автоматизированного электропривода изображен на рисунке ниже.
Рисунок 1. Схема автоматизированного электропривода. Автор24 — интернет-биржа студенческих работ
Здесь: Пру — преобразовательное устройство; ИСУ-информационная система управления; СПУ — силовое преобразовательное устройства; РД — ротор двигателя; ЭМП — электромеханический преобразователь; ИМ — исполнительный механизм; ПУ — передаточное устройство; ДОС — датчик обратной связи; ЗУ — задающее устройство.
Таким образом электропривод состоит из четырех основных частей:
- Электрический двигатель, который предназначен для преобразования электроэнергии в механическую.
- Силовое преобразовательное устройство, которое может быть выполнено на базе электромагнитных, полупроводниковых или электромашинных преобразователей.
- Передаточное устройство, которое используется для передачи механической энергии от электрического двигателя к исполнительному механизму, а также согласования характера и вида их движения. Самыми распространенными передаточными устройствами в составе электроприводов являются цепные передачи, редукторы, кулисные механизмы и планетарные системы.
- Система управления, которая представляет собой совокупность информационных и управляющих систем, задача которых заключается в управлении электроприводом для обеспечения движения рабочего органа исполнительного механизма.
Готовые работы на аналогичную тему
Статические и динамические характеристики электропривода
Статические характеристик современных электроприводов делятся на:
Механическая характеристика электропривода — это зависимость скорости вращения вала от момента, который развивает двигатель.
Математически механическая характеристика выражается следующим образом:
где: w – угловая скорость вращения вала; n – скорость вращения вала.
Механическая характеристика является естественной в том случае, когда вышеозначенные зависимости получаются при номинальных параметрах сети питания, без добавочных сопротивлений в цепи двигателя и нормальной схеме включения. Когда в цепи двигателя присутствуют добавочные сопротивления или питание двигателя осуществляется от сети, с частотой или напряжением отличным от номинального, то механическая характеристика будет искусственной. Таким образом у электропривода может быть только одна естественная механическая характеристика, а искусственных большое количество.
Механические характеристики, в зависимости от степени жесткости делятся на жесткие, мягкие и абсолютно жесткие. Абсолютно жесткая характеристика возникает в том случае, когда величина жесткости бесконечна. Жесткая механическая характеристика образуется при небольшом падении скорости при увеличении момента и степени жесткости 40-10. Такими характеристиками обладают двигатели постоянного тока с независимым возбуждением и асинхронные двигатели в пределах линейного участка. Мягким механическим характеристикам свойственны большое относительное падение при увеличении момента и жесткость не выше 10. Таким характеристиками обладают двигатели постоянного тока с последовательным возбуждением, с независимым возбуждением с большим сопротивлением в цепи якоря, а также асинхронные двигатели с дополнительным сопротивлением в цепи ротора. Пример механических характеристик изображен на рисунке ниже.
Рисунок 2. Механические характеристики. Автор24 — интернет-биржа студенческих работ
Здесь: 1 — абсолютно жесткая механическая характеристика; 2 — жесткая механическая характеристика двигателя постоянного тока с независимым возбуждением; 3 — жесткая механическая характеристика асинхронного двигателя в пределах нелинейного участка; 4 — мягкая механическая характеристика двигателя постоянного тока с последовательным возбуждением. Электромеханическая характеристика представляет собой электромеханическую скоростную характеристику зависимости частоты вращения якоря от тока нагрузки и характеристику зависимости вращающего момента от тока нагрузки. Данные характеристики снимаются при неизменном напряжении.
Динамическими характеристиками электрического привода выражаются зависимости координат механической части привода от времени, а также угловой скорости от времени. Допустим, что к элементу, угловая скорость которого равна 0, приложены два момента одновременно: статический (Мс) и вращающий электромагнитный (М=f(w)). Если представить зеркальное отображение статического момента в первом квадранте координатной плоскости, то зависимость динамического момента будет иметь следующий вид (заштрихованная часть).
Рисунок 3. Зависимость динамического момента. Автор24 — интернет-биржа студенческих работ
С увеличением угловой скорости вращения динамический момент уменьшается и при некотором ее значении будет равен 0. Найдем динамический момент: М-Мс. Для этого составляются дифференциальные уравнения, а после их решения строятся динамические характеристики:
Электропривод и электрооборудование (стр. 1 )
 | Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 |

ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
СТАВРОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ
ЭЛЕКТРОПРИВОД И ЭЛЕКТРООБОРУДОВАНИЕ
очной и заочной формы обучения
История развития электропривода (ЭП). Понятие,
классификация ЭП
Вопросы
1) История развития ЭП
2) Понятие ЭП, достоинства ЭП
1 История развития ЭП
История развития ЭП, являющаяся оптимальным сочетанием электрических машин (ЭМ), аппаратов, преобразователей и устройств управления, неразрывно обусловлена образующими ЭП компонентами. Вместе с тем ЭП, как система имеет свою собственную историю.
Начало развития ЭП было положено созданием в первой половине 19 века работоспособностью образцов ЭМ. Это стало возможным благодаря успехам в области электромагнетизма. Первый электродвигатель, с помощью которого осуществлялся ЭП, был построен в 1834…1838г. Петербургским академиком Борисом Семеновичем Якоби. В 1838г на Ниве были проведены испытания этого двигателя, установленного на катере (12…14 чел). Это было первое судно с ЭП. Однако несовершенство технических средств, в частности, источника питания (гальванические батареи), не позволили блестящему изобретателю и его ученикам дальше продолжать практическое применение.
В 50-60-х годах 19 века некоторое распространение получили электродвигатели французского электротехника Фромана (типографические и ткацкие станки).
И все же почти до конца 19 века пар и вода оставались основной силой в промышленном производстве.
Несмотря на успехи, достигнутые к семидесятым годам 19 века в области конструирования электродвигателя (ЭД) постоянного тока, электрическая энергия использовалась только на освещение (распределение электроэнергии оставалось неудовлетворительной).
Появление переменного однофазного тока сыграло существенную роль в развитии электротехники вообще, однако в ЭП – нет, так как ЭД однофазного переменного тока не имели пускового вращающего момента, в связи с чем, их применение было крайне ограничено.
И только в 1888г. предложенная и реализованная 3-х фазная система передачи электрической энергии позволила сделать прорыв в развитии ЭП.
В 1889 г. создается 3-х фазный асинхронный двигатель с короткозамкнутым ротором в виде беличьей клетки.
Несомненные преимущества централизованного производства электроэнергии, привели к тому, что электродвигатель, вытесняя другие виды двигателей, занял лидирующие позиции в ЭП промышленных установок и сельском хозяйстве.
Мощность ЭД по отношению к общей мощности установленных двигателей составляла: 1890г-5%, 1927-75%, сегодня — 100 %.
В Советском Союзе ЭП получил большое развитие в годы первых пятилеток. Большую роль в развитии ЭП сыграла подготовка кадров. В 1922г. в Ленинградском электротехническом институте под руководством профессора создается специальность «Электрификация промышленности», которая положила начало регулярному выпуску специалистов в области ЭП.
В 1925г. – выходит книга «Электрическое распределение электроэнергии» — первый труд в области ЭП.
В 30-е годы были разработаны принципы следящего ЭП (автоматическое управление).
В 40-е годы проектируются электромашинные усилители, интенсивно развивается военная электротехника (системы управления), первые автоматические линии станков.
Большой прорыв в ЭП наблюдается с появлением полупроводниковой техники. Транзистор изобретен в США в 1948г.
В 50-х…60-х годах – множество схем для питания маломощных двигателей (I=5А; U=60В).
Система тиристорный преобразователь – двигатель постоянного тока ТП – ДПТ становится с середины 60-х годов практически единственным решением в регулируемом ЭП.
В 70-е годы появляются частотные преобразователи для асинхронных ЭП.
60-е – 70-е годы – появляются шаговые, линейные ЭП. Профессор явился разработчиком нового типа линейных электродвигателей — линейных управляющих двигателей.
В 70-е годы, с развитием микропроцессоров резко возрастают функциональные возможности в управлении координат ЭП, диагностике.
Развитие современного ЭП идет с развитием элементной базой. Сегодня силовые ключи (I до 600 А, U= до 1200В, f=30кГц и выше), преобразователи частоты до 600кВт.
В 2002г. европейский рынок регулируемых ЭП состоит: на 68% из ЭП переменного тока; 15%-постоянного тока, 10% гидроприводов, 7 % — механических.
На сегодня мощности отдельных приводов составляют десятки МВт с регулированием частоты вращения от одного оборота в час до 150.000 оборотов в минуту.
Диапазон применения современного ЭП — от искусственного сердца
до шагающего экскаватора.
2 Понятие ЭП. Достоинства ЭП
Электрическим приводом или электроприводом называют электромеханическую систему, состоящую в общем виде из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенную для приведение в движение исполнительных органов рабочих машин и управления этим движением (рисунок 1).
 |
Рисунок 1 – Структурная схема ЭП
Основное назначения ЭП — преобразование электроэнергии в механическую энергию исполнительных органов машин и механизмов. В отдельных случаях, например при генераторном режиме или торможении, возможно и обратное преобразование.
На долю ЭП приходится 60% вырабатываемой в стране электроэнергии.
На рисунке 1 представлены:
· потоки электрической энергии -¯, потоки механической энергии — ß;
· ПРБ — преобразовывают эл. энергию в необходимый вид (в простейшем случае это магнитные пускатели, подающие питание на электродвигатель, а могут быть тиристорные коммутаторы, регуляторы напряжения, преобразователи частоты тока и т. д.);
· ПРД — преобразовывают механическую энергию в необходимый вид для потребителя механической энергии (ПМЭ) (муфты, шкиво-ременные передачи, редукторы и т. д.)
· УУ — информационная часть (управляющие устройства, микропроцессорные средства, микро-ЭВМ).
Как для всякого устройства важным показателем является КПД
hЭП= hПРБ· hЭД· hПРД,
т. к. коэффициент полезного действия ПРБ и ПРД ≈ 1 и мало зависит от нагрузки, то hЭП определяется hЭД, которое также является достаточно высоким и при номинальной нагрузки составляет 60-95%.
Малое КПД соответствует тихоходным двигателям малой мощности. При повышении мощности выше 1кВт hЭД и соответственно hЭП превышает 70%.
1) низкий уровень шума при работе;
3) широкий диапазон мощностей и угловых скоростей вращения;
4)доступность регулирования угловой скорости вращения и соответственно производительности технологической установки;
5)относительная простота автоматизации, монтажа, эксплуатации по сравнению с тепловыми двигателями, например, внутреннего сгорания.
3 Классификация ЭП
По основным характерным признакам ЭП классифицируют следующим образом:
1) по способу передачи механической энергии исполнительному органу различают: групповой, индивидуальный, взаимосвязанный ЭП.
Групповой ЭП — обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины (РМ) (рис.2).
 |
Рисунок 2 – Групповой ЭП
Разновидностью группового является трансмиссионный ЭП (рис.3).

Рисунок 3 — Трансмиссионный ЭП
Индивидуальный ЭП (на каждую рабочую машину свой электродвигатель), рисунок 4.
 |
Рисунок 4 – Индивидуальный ЭП
Преимущества индивидуального ЭП:
— линии не загромождаются тяжелыми трансмиссиями и передаточными устройствами;
— улучшаются условия труда;
— улучшается освещение рабочего места;
— при ремонте простой только одного ЭП;
— упрощается механическая передача;
— благоприятные условия для автоматизации.
Взаимосвязанный ЭП — содержит два или несколько связанных между собой ЭП, при работе поддерживается равенство скоростей или нагрузок.
 Пример — цепной конвейер (рис.5).
Пример — цепной конвейер (рис.5).
Рисунок 5 – Схема взаимосвязанного электропривода
Широко применяется разновидность взаимосвязанного — многодвигательный ЭП. Двигательные устройства работают на один вал (привод платформы экскаватора — позволяет осуществить равномерное распределение статических и динамических нагрузок при поворотах и перегрузках).
2) по виду движения ЭП обеспечивают:
-поступательное (реечная винтовая передача или линейный ЭД);
3) по роду тока: электропривода с электродвигателями постоянного и переменного тока;
4) по принципу управления: нерегулируемый, регулируемый (следящий и программируемый);
5) по степени автоматизации: неавтоматизированный,
автоматизированный, автоматический (без операторов).
Автоматизированный и автоматический ЭП получили наибольшее применение.
Механические характеристики рабочих машин и
электродвигателей. Статическая устойчивости ЭП
Вопросы
1) Механические характеристики рабочих машин
2) Механические характеристики электродвигателей (искусственные, естественные)
3) Жесткость механических характеристик эл. двигателей и рабочих машин
4) Статическая устойчивость ЭП
1 Механические характеристики рабочих машин
Механической характеристикой рабочей машины называется зависимость приведенной к валу двигателя угловой скорости от момента сопротивления w=f(Мс).
При поступательном движении соответственно – линейная скорость в функции усилия V=f(Fc).
Мс — статический момент, складывается из момента на трение (пропорциональна весу вращающихся частей и диаметру опоры), момента от трения на рассекание воздуха (возрастающая функция от частоты вращения), собственно полезный Мс (от типа рода нагрузки).
По характеру действия моменты нагрузки Мс делятся на активные и реактивные:
· Активные – имеют постоянное, не зависящие от скорости, направление своего действия и создаются так называемыми потенциальными силами – силами притяжения Земли, силами упругой деформации и др.
· Реактивные – создаются в основном силами трения, они всегда противодействуют движению и поэтому изменяют свой знак с изменением направления скорости движения.
Различные производственные механизмы обладают различными механическими характеристиками которые можно описать выражением
Мс=М0+(Мс. н –М0)( )x, (1)
)x, (1)
где Мс — момент сопротивления производственного механизма (рабочей
машины ) при скорости w (текущей скорости);
Мс. н — номинальный момент сопротивления при wн;
М0 — начальный момент сопротивления при w=0;
w — текущая угловая скорость;
х — показатель степени, характеризующий изменение момента
сопротивления при изменении скорости.
Приведенная, формула позволяет классифицировать механические характеристики производственных механизмов, ориентировочно, на следующие основные категории (рис.1)
 |
1- не зависящая от скорости характеристика, х=0
(подъемные краны, лебедки, механизмы подачи металлорежущих станков, поршневые насосы при неизменной высоте подачи, конвейеры, транспортеры с постоянной нагрузкой). Сюда же могут быть отнесены все механизмы, у которых основным моментом сопротивления является момент трения, т. к. обычно в пределах рабочих скоростей момент трения изменяется мало;
(генераторы постоянного тока с независимым возбуждением работающий на постоянную внешнюю нагрузку, зерноочистительные машины);
3- нелинейно-возрастающая, х=2 – называют вентиляторной характеристикой (вентиляторы, центрифуги, сепараторы, центробежные насосы);
4- нелинейно-спадающая, х= -1 (токарные, расточные, фрезерные и другие металлорежущие станки, зерновые нории).
Эти характеристики не исчерпывают всех практических возможных случаев, но дают представление о типичных производственных механизмах.
Целесообразно установить зависимость мощности от скорости
для каждой группы механизмов.
Если пренебречь М0 в выражении (1), уравнение примет вид
МC= МC. Н. (  )Х ; (2)
)Х ; (2)
умножим правую и левую части на w, получим
РС =МС. w = МС. Н. ( )X . w = МС. Н.  , (3)
, (3)
где РС – мощность потребляемая механизмом при скорости w.
При х=0 РС1 =МС. Н. w= К1 w; х=1 РС2 = w2= К2 w2;
w2= К2 w2;
х=2 РС3 = w3= К3 w3; х= -1 РС4 =МС. Н. wн= const.
w3= К3 w3; х= -1 РС4 =МС. Н. wн= const.
Таким образом, для механизмов первой группы мощность пропорционально скорости, для механизмов второй – квадрату скорости, третьей – кубу скорости, четвертой – не зависит от скорости.
2 Механические характеристики электродвигателей
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента w= f(M)
Скоростная или электромеханическая характеристика — зависимость его угловой скорости от тока электродвигателя w= f(Iдв).
Рисунок 2 дает представление о типичных механических характеристиках электродвигателей.

Рисунок 2 – Механические характеристики электродвигателей:
1-синхронного; 2-постоянного тока независимого возбуждения; 3- асинхронного; 4-постоянного тока последовательного возбуждения
Естественные механические характеристики соответствуют паспортной схеме включения с номинальными параметрами питающей сети.
Искусственные механические характеристики соответствуют схемам включения электродвигателей с дополнительными элементами (резисторы, конденсаторы и т. д.), а также при варьировании питающих напряжений, частоты тока и т. п. Данные характеристики часто называют регулировочными.
3 Жесткость механических характеристик ЭД и рабочих машин
Почти все ЭД обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это обычно относится ко всем двигателям, однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется критерием, так называемой жесткостью их механических характеристик.
Это отношение разности электромагнитных моментов, развиваемых электродвигателем, к соответствующий разности угловых скоростей ЭП (рис.3), т. е.
b=  =
= ; (4)
; (4)


Рисунок 3 — К определению жесткости механических характеристик
Жесткость механических характеристик электродвигателей различна, что иллюстрируется рисунком 4.
 |

Рисунок 4 – Механические характеристики электродвигателей: 1 – абсолютно жесткая синхронного ЭД, β = ∞ ; 2 – жесткая двигателя постоянного тока независимого возбуждения (такая же асинхронного двигателя на рабочем участке характеристики); 3- мягкая двигателя постоянного тока параллельного возбуждения; 4 – жесткость равна нулю, двигатель постоянного тока независимого возбуждения при питании от источника тока
Графически, жесткость определяется как tg угла наклона между осью скоростей и касательной к данной точки механической характеристики (рис.5)
b = . tg g, (5)
. tg g, (5)
угол отсчитывается по часовой стрелке от оси скоростей до касательной.

Рисунок 5 – К определению коэффициента жесткости
4 Статическая устойчивость ЭП
Работа электродвигателя и рабочей машины в установившемся режиме соответствует равновесию МД=МС точка А на рисунке 6.
Изменение момента сопротивления на валу двигателя приводит к тому, что скорость двигателя и момент, который он развивает, могут автоматически меняться и привод будет работать устойчиво при другой скорости с новым значением момента.
Для восстановления равновесия между изменившемся сопротивлением и моментом двигателя во всех неэлектрических двигателях требуется участие специальных регулятор. В электродвигателях роль автоматического регулятора выполняет Э. Д.С. двигателя. Эта особенность автоматического поддержания равновесия очень ценно в ЭП.














Рисунок 6 – К определению устойчивости электропривода
Предположим Мс вырос до w1, при этом момент нагрузки Мс1 больше момента двигателя М1 тогда в соответствии с уравнением движения электропривода
±Мдв±Мс= ,
,
в системе будет действовать отрицательный динамический момент, начнется процесс торможения, который закончится в точке wуст.
Рассмотрим положение, при котором кратковременное возмущение вызвало снижение скорости до w2 ‹ wуст. В этом случае М2 › Мс2 и уже под действием положительного динамического момента скорость начнет возрастать, пока не достигнет wуст.
Таким образом система обладает свойством возвращаться к скорости установившегося движения при возможных отклонениях от нее, т. е. движение в такой системе является устойчивым.
Под статической устойчивостью понимается такое состояние установившегося режима работы ЭП, когда при случайно возникшем отклонении скорости от установившегося значения привод возвращается в точку установившегося режима.
Привод статически устойчив, если в точке установившегося режима выполняется условие с использованием понятия жесткости механических характеристик двигателя и рабочей машины
 МС,
МС,  >0, — ускорение ЭП,
>0, — ускорение ЭП,
Механические характеристики электроприводов
 Выбор электропривода определяется требованиями рабочей машины. Электропривод должен обеспечить выполнение рабочей машиной заданной технологии при всех возможных режимах: пуска, приема и сброса нагрузки, торможения, изменения скорости, постоянной нагрузки. Характер протекания этих режимов в первую очередь определяется механическими свойствами двигателя и рабочей машины . Одним из основных критериев оценки механических свойств как двигателя, так и.рабочей машины служат их механические характеристики .
Выбор электропривода определяется требованиями рабочей машины. Электропривод должен обеспечить выполнение рабочей машиной заданной технологии при всех возможных режимах: пуска, приема и сброса нагрузки, торможения, изменения скорости, постоянной нагрузки. Характер протекания этих режимов в первую очередь определяется механическими свойствами двигателя и рабочей машины . Одним из основных критериев оценки механических свойств как двигателя, так и.рабочей машины служат их механические характеристики .
Механические характеристики электродвигателей
Механической характеристикой электродвигателя называется зависимость скорости вращения вала от развиваемого двигателем момента ω = φ (Мд) или n = f (Мд), где ω — угловая скорость вращения вала, рад/с, n — скорость вращения вала, об/мин.
Механическая характеристика двигателя называется естественной , если зависимость n = f (М) получена при номинальных параметрах питающей сети, нормальной схеме включения и без добавочных сопротивлений в цепи двигателя.
При наличии добавочных сопротивлений или питании двигателя от сети с напряжением или частотой, отличными от номинальных, механические характеристики двигателя будут называться искусственными . Очевидно, что искусственных характеристик двигатель имеет бесчисленное множество, а естественную — только одну.
Большинство электродвигателей под нагрузкой при увеличении момента снижает скорость вращения. Характеристику в этом случае называют падающей . Степень изменения скорости двигателя при изменении момента оценивают так называемой жесткостью механической характеристик и, которую определяют отношением α = Δ М/Δω или α = Δ М/Δ n
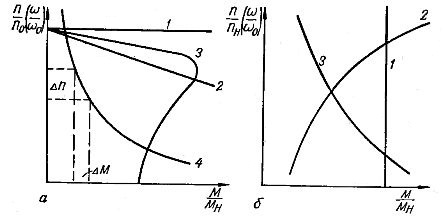
Рис. 1. Различные виды механических характеристик: а — электродвигателей, б — производственных машин.
Величины изменения момента и падения скорости при определении жесткости берут обычно в относительных единицах. Это дает возможность сравнивать характеристики двигателей различного вида.
В зависимости от степени жесткости все механические характеристики двигателей подразделяют на следующие группы.
1. Абсолютно жесткие характеристики с величиной жесткости α = ∞ . Такие механические характеристики (кривая 1, рис. 1, а) со строго постоянной скоростью вращения имеют синхронные двигатели.
2. Жесткие характеристики со сравнительно небольшим падением скорости при увеличении момента и α = 40 — 10. К этой группе относятся естественные характеристики двигателей постоянного тока с независимым возбуждением (кривая 2) и характеристики асинхронных двигателей в пределах линейного участка (кривая 3).
3. Мягкие механические характеристики с большим относительным падением скорости при увеличении момента и с жесткостью до α = 10. Такие характеристики имеют двигатели постоянного тока с последовательным возбуждением (кривая 4), двигатели с независимым возбуждением с большим сопротивлением в цепи якоря и асинхронные двигатели с добавочными сопротивлениями в цепи ротора.
При работе электропривода для преодоления сопротивления рабочей машины двигатель должен развивать определенный момент. Поэтому при выборе двигателя необходимо выявить прежде всего соответствие характеристик двигателя и рабочей машины.

Механические характеристики рабочих машин
Механической характеристикой рабочей машины называют зависимость момента статических сопротивлений машины от скорости вращения приводного вала. Эту зависимость для удобства совместного построения выражают обычно так же, как и характеристику двигателя, в виде ω = φ (Мс) или n = f (Мс).
Момент статических сопротивлений Мс , или сокращенно статический момент, представляет собой момент сопротивления, создаваемый машиной на приводном валу в статическом (установившемся) режиме, когда скорость не изменяется.
Механическую характеристику машины можно получить опытным путем или расчетом, если известно распределение статических усилий или моментов по элементам кинематической схемы. Статические моменты машин могут зависеть не только от скорости, но и от других величин, поэтому при практических расчетах электроприводов необходимо рассматривать каждый случай в отдельности.
Статические моменты различных рабочих машин по характеру зависимости их от скорости (механические характеристики) подразделяют на группы. Наиболее часто встречающиеся на практике из них следующие.
1. Статический момент мало зависит или практически не зависит от скорости (кривая 1, рис. 2, б). Такие характеристики имеют подъемные механизмы, краны, лебедки, тельферы, а также ленточные транспортеры при постоянной нагрузке.
2. Статический момент машины возрастает пропорционально квадрату скорости (кривая 2). Эту характеристику, типичную для осевых вентиляторов, называют вентиляторной характеристикой и аналитически представляют в виде формулы: Mc = Mо+kn 2 , где Мо — начальный статический момент, обусловленный чаще всего силами трения, которые обычно не зависят от скорости, k — опытный коэффициент. Кроме вентиляторов, вентиляторными характеристиками обладают центробежные и вихревые насосы, сепараторы, центрифуги, гребные винты, турбокомпрессоры и барабаны молотилок на холостом ходу.
3. Статический момент уменьшается при увеличении скорости (кривая 3). К этой группе относятся характеристики некоторых транспортерных механизмов и некоторых металлорежущих станков.
4. Статический момент изменяется от скорости неоднозначно, с резким переходом, обусловленным особенностью технологического процесса. Характеристики этой группы имеют машины, работающие с частыми большими перегрузками, которые иногда приводят к полной остановке. Например, механизм черпания одноковшового экскаватора, скребковый транспортер, работающий под завалом транспортируемой массы, дробилки и другие машины.
Кроме перечисленных, на практике встречаются и другие виды механических характеристик машин, например поршневых насосов и компрессоров, статические моменты которых зависят от пути.
http://pandia.ru/text/78/446/40280.php
http://electricalschool.info/elprivod/1335-mekhanicheskie-kharakteristiki.html