Канонические формы уравнений в пространстве состояний
Тема: «Канонические формы уравнений состояния»
Математические модели объектов управления первоначально получаются на основе расчетных данных и физического поведения объекта. В этом случае переменные состояния представляют собой физические переменные объекта, и описания в пространстве состояний объективно связываются с физической реальностью.
В некоторых случаях, однако, полезно ввести переменные состояния, которые формально определяются как линейная комбинация различных физических переменных. Такое преобразование выполняется в целях получения определенных канонических форм уравнений состояния, что облегчает обнаружение некоторых свойств объекта и системы или позволяет описать их с помощью меньшего числа параметров, а также установить для односвязных систем (с одним входом и одним выходом) непосредственную связь векторно-матричных моделей с моделями типа “вход — выход”.
Рассмотрим n-мерный вектор  — допустимый вектор состояния некоторой системы и невырожденную матрицу T (n x n). Тогда вектор z=Tx — также возможный вектор состояния рассматриваемой системы.
— допустимый вектор состояния некоторой системы и невырожденную матрицу T (n x n). Тогда вектор z=Tx — также возможный вектор состояния рассматриваемой системы.
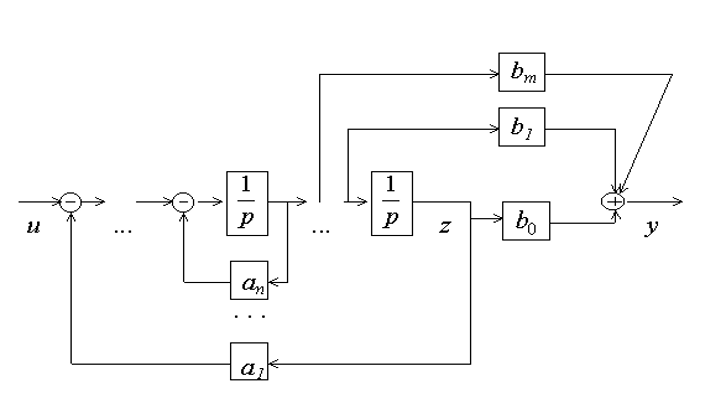
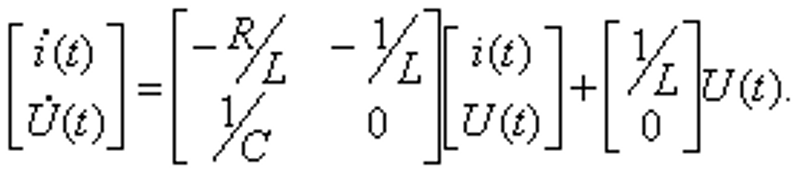
Реальная система с вектором состояния x описывается следующими уравнениями при D=0:
 |
 |
 |
 |
 |
 и дискретной
и дискретной  систем является инвариантом, если новые состояния вводятся через невырожденную матрицу Т.
систем является инвариантом, если новые состояния вводятся через невырожденную матрицу Т.  |
 |
 |
 |
 |
 |
 |
 не вырождена. Тогда существует такое преобразование, при котором преобразованная система имеет вид
не вырождена. Тогда существует такое преобразование, при котором преобразованная система имеет вид  |
 |
 |
 |
 |
 |
 |



 |
 .
. получим
получим  |

 и управления
и управления  в новом координатном базисе будут иметь следующий вид
в новом координатном базисе будут иметь следующий вид




 |
 |
 .
.  |

 , получаем, что матрица преобразования ВММ в каноническую форму наблюдаемости (5.22) соответствует матрице наблюдаемости исходной системы
, получаем, что матрица преобразования ВММ в каноническую форму наблюдаемости (5.22) соответствует матрице наблюдаемости исходной системы  |
 |



 с помощью невырожденной матрицы Т.
с помощью невырожденной матрицы Т.
 . Для вычисления какой матрицы преобразованной системы будет использована матрица Q.
. Для вычисления какой матрицы преобразованной системы будет использована матрица Q.

 ;
;не всегда являются физическими величинами. Иногда для удобства математического моделирования САУ целенаправленно отказываются от физического содержания переменных состояния. Поэтому в общем случае x n (t) являются абстрактными переменными. Однако они должны однозначно выражаться через физические величины y p (t).
В общем случае исследуемую САУ считают многомерной (рисунок 2.29). Для упрощения работы с многомерными величинами их представляют в векторно-матричном виде. Так, совокупность входных переменных представляют в виде вектора входа совокупность выходных переменных – в виде вектора выхода а совокупность переменных состояния – в виде вектора состояния
Согласно МПС множество всех значений, которые может принять вектор входа U в момент времени t, образует пространство входа исследуемой САУ. Аналогично, множество всех значений, которые может принять вектор выхода Y в момент времени t, образует пространство выхода, а множество всех значений, которые может принять вектор состояния X в момент времени t, образует пространство состояний САУ.
Как было отмечено, векторно-матричные уравнения (2.82) описывают многомерную САУ. Эта же совокупность уравнений служит ММ одномерной САУ, т.е. системы с одним входом и одним выходом. При использовании МПС такие САУ часто называют системами со скалярным входом и выходом, так как входная и выходная величины являются скалярными. Уравнения состояния и выхода одномерной системы имеют вид
Канонические формы уравнений состояния
Разработано множество эквивалентных форм (представлений) уравнений состояния, различающихся между собой видом матриц A , B и C . Одни из форм используются чаще, так как обладают в некоторых случаях известными преимуществами перед другими. Такие формы записи уравнений состояния называются каноническими. Считают, что удобство канонических форм заключается в следующем. Во-первых, канонические представления матриц обеспечивают минимальное количество ненулевых элементов, что заметно упрощает вычисления. Во-вторых, канонические представления приводят к простым алгоритмам синтеза оптимальных регуляторов замкнутых САУ /3/.
Таким образом, в результате приведения уравнений к канонической форме более простую структуру принимают две из трех матриц: A и B (управляемые формы) или A и C (наблюдаемые формы). Управляемые канонические формы используют при синтезе регулятора, а наблюдаемые канонические формы – при синтезе наблюдателя /23/.
Первая управляемая каноническая форма
Первой управляемой канонической формой называют специальные матрицы
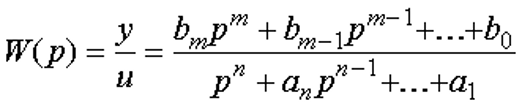
Очевидно, что коэффициенты характеристического полинома A(s) составляют последний столбец матрицы A. Матрицы такого вида называют матрицами Фробениуса. Элементы таких матриц определяют без вычислений. Характеристический многочлен A(s) совпадает со знаменателем ПФ системы управления. Корни данного многочлена определяют устойчивость и качество переходных процессов в САУ.
Матрица входа B рассматриваемого канонического представления также имеет специальный вид. Вследствие скалярного входного воздействия матрица B представляет собой вектор-столбец, элементы которого также не требуется вычислять.
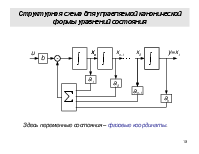
Полученная ММ системы управления может быть изображена в виде структурной схемы, представленной на рисунке 2.31.
Принятые переменные состояния являются выходными сигналами интеграторов.
Первую управляемую каноническую форму называют также канонической формой дуальной фазовой переменной /20/.
Методы переменных состояния в теории автоматического управления. Современная теория автоматического управления
Страницы работы
Фрагмент текста работы
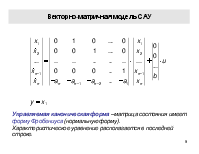
Характеристическое уравнение располагается в последней строке.
Структурная схема для управляемой канонической формы уравнений состояния
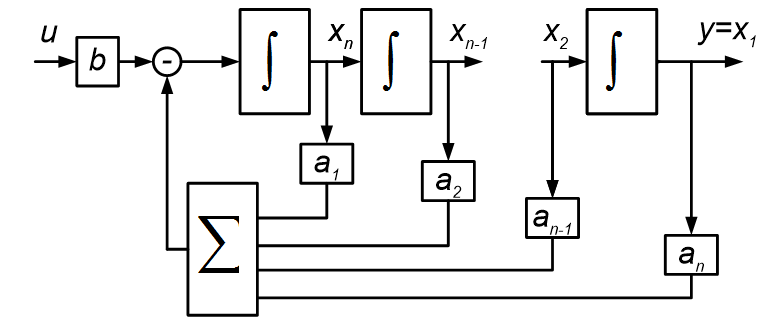
Здесь переменные состояния – фазовые координаты.
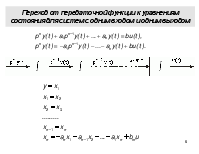
Другая форма: в правой части уравнения содержатся производные от входного воздействия


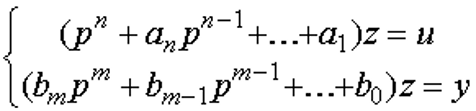
Введем переменные состояния:
Здесь координаты состояния xi – абстрактные переменные.
Этим уравнениям соответствует структура:
Возможно другое представление:

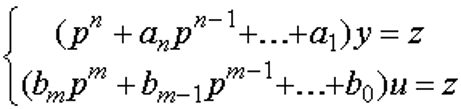
Структурная схема может быть преобразована к виду:
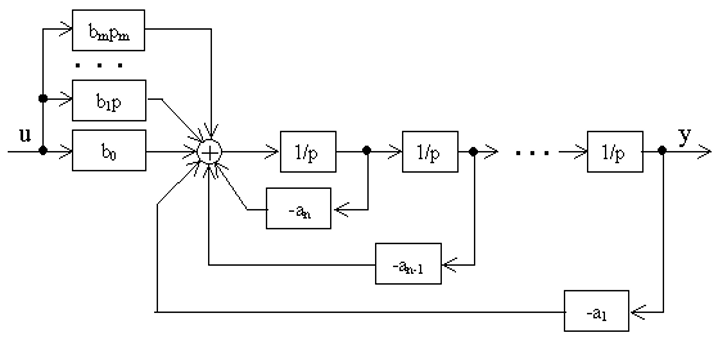
Тогда матрицы A, B, C в уравнениях состояния будут:
Это — наблюдаемая каноническая форма уравнений состояния.
Таким образом, переход от передаточной функции к описанию в переменных состояния является неоднозначным.
Другие канонические формы уравнений состояния.
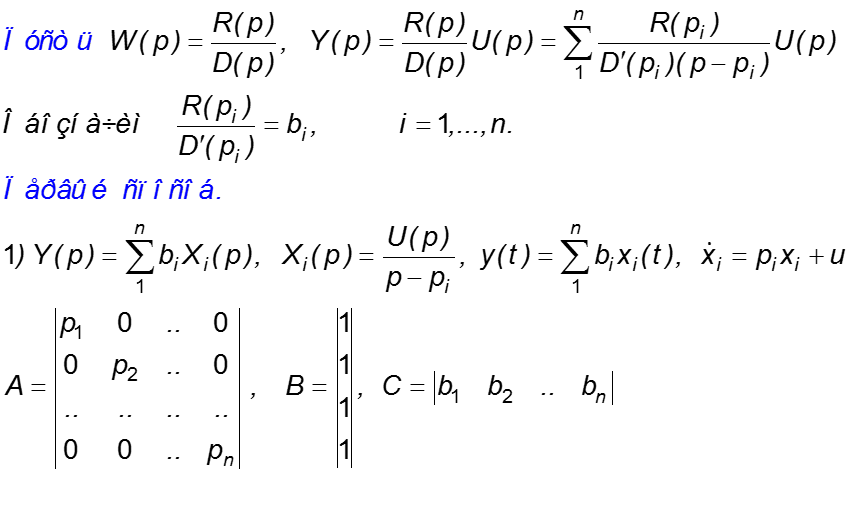
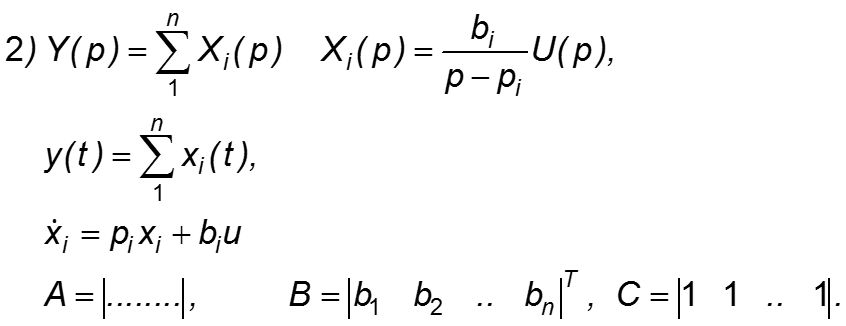
В двух последних формах матрица А – диагональная.
- Преимущества структурной модели :
- наглядное представление понятия «состояние систем»,
- однозначно представляется структура взаимодействий
- между переменными в виде системы с обратными связями,
- структурные модели полезны при моделировании САУ
- на аналоговых или цифровых вычислительных машинах.
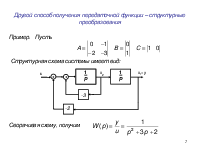
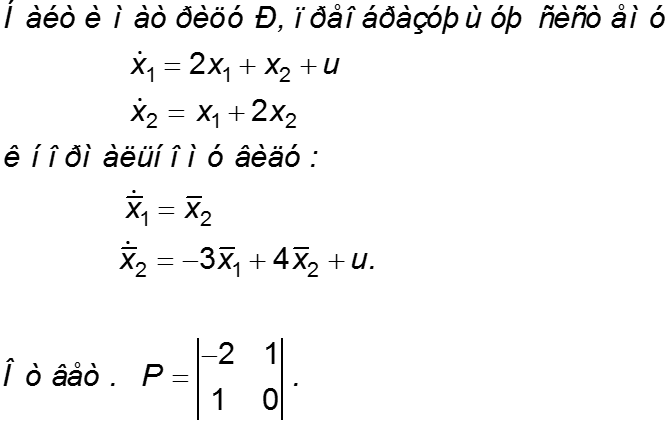
Пример получения уравнений состояния
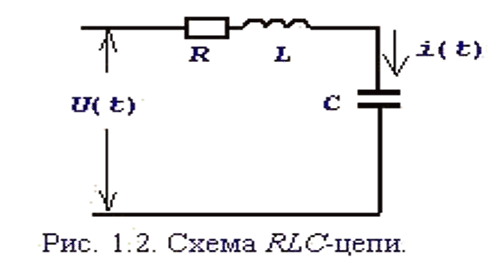
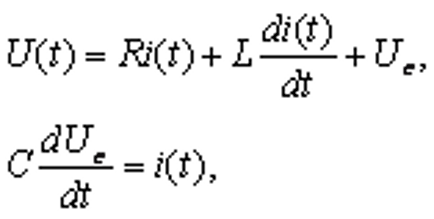
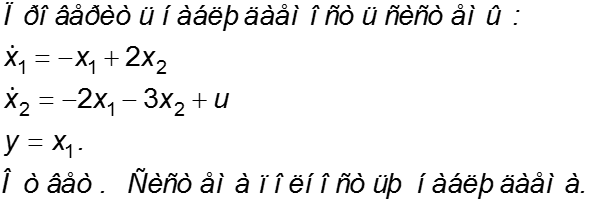
П р и м е р. Система описывается дифференциальным уравнением Составим уравнения состояния и структурную схему
Свойства объектов и систем управления. Управляемость .
Определение. Система полностью управляема, если она может быть переведена из любого начального состояния x(0) в начало координат (0, 0,…,0) под действием управления u(t) за конечное время. Теорема Калмана об управляемости. Состояние непрерывной системы управляемо, если и только если ранг матрицы NУ = [B | AB | A2B | . | An-1B] равен размерности пространства состояний n.
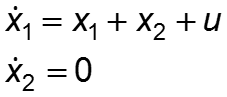
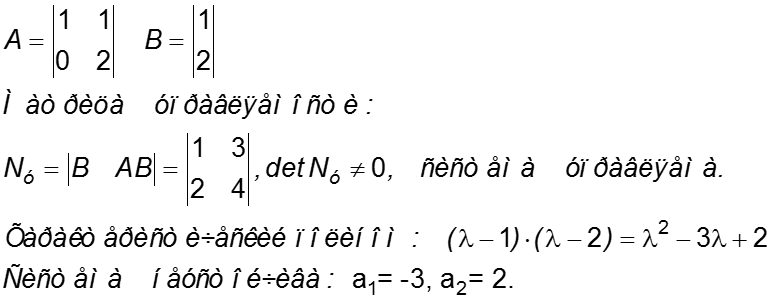
Пример 1. Проверим, управляема ли система:
Пример 2. Также проверим управляемость системы:
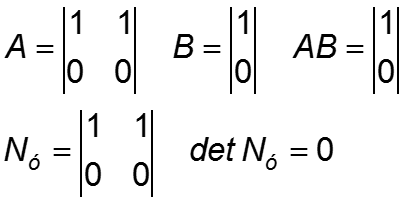
Т.к. rangNy = 1 , система управляема неполностью. Порядок управляемой части равен 1.
В такой системе есть “висячая” часть на входе.
В случае представления объекта управления моделью типа “вход — выход” условием его управляемости является отсутствие общих корней полиномов А(p) и B(p): Т.е. система управляема, если алгебраические уравнения A(p)=a0pn+a1pn-1+…+an = 0, B(p)=b0pm+b1pm-1+…+bm = 0 не имеют общих корней.

Пример 2. Определим управляемость системы, имеющей передаточную функцию

Прямой расчет корней числителя и знаменателя дает результаты, приведенные в табл.
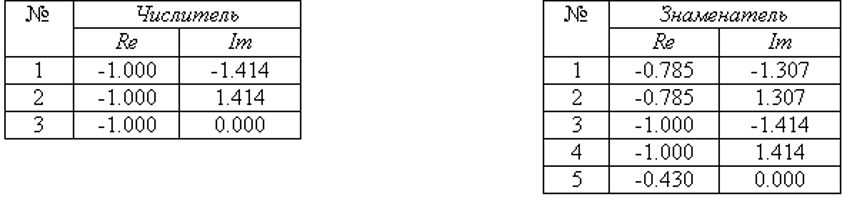
Таким образом, числитель и знаменатель передаточной функции W(p) имеют два общих корня (-1 -j1.414) и ( -1+j 1.414). Значит, система не управляема. Изменение значений корней для этих пар в числителе или знаменателе переведет систему в ранг управляемых.
- Для осуществления управления необходимо иметь информацию о текущем состоянии системы, т.е. о значениях вектора состояния x(t) в каждый момент времени.
- Однако некоторые из переменных состояния являются абстрактными, не имеют физических аналогов в реальной системе или же не могут быть измерены. Измеряемыми и наблюдаемыми являются физические выходные переменные y(t).
- Таким образом, возникает вопрос: можно ли определить вектор состояния по измеряемому вектору выхода и вектору входа?
- Определение. Система называется полностью наблюдаемой, если по результатам измерения входных u(t) и выходных y(t) переменных можно однозначно определить все составляющие вектора x(t) на конечном интервале времени.
- Теорема Калмана о наблюдаемости. Система наблюдаема, если и только если ранг матрицы
- Nн = [CT | ATCT | (AT)2CT | . | (AT)n-1CT].
- равен размерности пространства состояний.
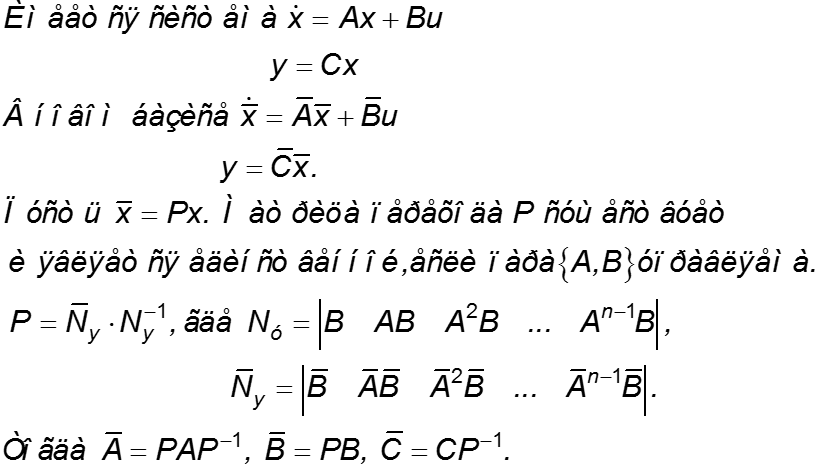
Изменение базиса в уравнениях состояния
О синтезе системы
- Синтез системы — это направленный расчет, цель
- которого :
- построение рациональной структуры системы;
- нахождение оптимальных значений параметров отдельных звеньев.
- Качество управления можно описать двумя способами.
- Первый способ предусматривает или непосредственное задание динамических характеристик выходных координат системы при типовых воздействиях, или задание совокупности прямых и косвенных показателей качества (значение перерегулирования, времени регулирования, статической ошибки, частоты среза, полосы пропускания и т.д.).
- Второй способ основан на введении некоторого обобщенного функционала, определяемого всеми переменными системы управления u(t), x(t), y(t).
- В теории линейных систем управления широко используются оба указанных способа.
- Если передаточная функция системы не имеет нулей, то при выборе ее желаемого полинома D(p) можно руководствоваться стандартными формами (фильтрамиЧебышева, Баттерворта и др.)
- Стандартные формы определяют коэффициенты характеристического полинома , обеспечивающие в системе переходные и частотные характеристики с известными показателями качества.
- Если же система характеризуется наличием нулей, стандартные формы могут служить в качестве исходного материала для поиска своего оптимального расположения корней.
- Одним из основных методов проектирования детерминированных систем управления в пространстве состояний является метод расположения полюсов.
Распределение полюсов системы управления
- Рассмотрим систему с одним входом и одним выходом.
- Требуемое качество процессов может быть достигнуто заданием распределения полюсов замкнутой системы на комплексной плоскости.
- Для системы
- полюса системы — это собственные значения матрицы А или корни ее характеристического уравнения
- Если уравнения объекта заданы в нормальной форме (Фробениуса), то матрица обратных связей по состоянию
- Покажем это:

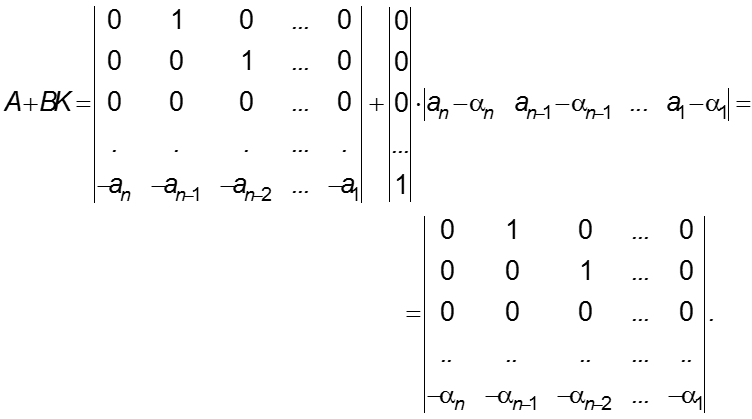
Нормальная форма матрицы А:
Пусть желаемые полюсы : λ1= -3, λ2= -2 Желаемый характеристический полином: φ=(λ+3)(λ+1)= λ 2+4 λ +3; α1=4, α2=3. Тогда k1 = a2 — α2 = 2 — 3 = -1, k2 = a1- α1 = -3 — 4 = -7. K = |-1 -7| Следовательно: v = u — x1 -7×2 Вычислив матрицу перехода P от исходной к нормальной форме можно получить матрицу обратной связи для исходного представления
http://tau-predmet.narod.ru/tau2-2-modeli_vhod-sostoyanie-vihod.html
http://vunivere.ru/work86624