Кинематика незатухающих гармонических колебаний
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Государственное образовательное учреждение высшего
Профессионального образования
«МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ»
МИИТ
Ярославский филиал
ФИЗИКА
для студентов второго 2 курса
1. КОЛЕБАНИЯ И ВОЛНЫ
Колебаниями называются процессы или движения, характеризующиеся определенной повторяемостью во времени. Колебания возникают, если:
§ существует внешнее воздействие, которое выводит систему из состояния механического, электрического или термодинамического равновесия;
§ на систему действуют силы, которые стремятся вернуть её в положение равновесия.
Кинематика незатухающих гармонических колебаний
Колебания будут свободными, если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на систему.
Простейшим видом колебаний являются гармонические колебания, при которых колеблющаяся величина любой природы х изменяется со временем по закону синуса или косинуса. Гармонические колебания материальной точки можно описать уравнением:
 (1.1)
(1.1)
(или  ), где А-максимальное смещение колеблющейся точки от положения равновесия, называемое амплитудой колебаний; ω — круговая или циклическая частота; φ0 — начальная фаза колебаний в момент времени t=0; (ωt+φ0)-фаза колебаний в момент времени t.
), где А-максимальное смещение колеблющейся точки от положения равновесия, называемое амплитудой колебаний; ω — круговая или циклическая частота; φ0 — начальная фаза колебаний в момент времени t=0; (ωt+φ0)-фаза колебаний в момент времени t.
Так как косинус (или синус) изменяется в пределах от +1 до –1, то х может принимать значения от +А до –А.
Определенные состояния системы повторяются через промежуток времени Т, называемый периодом колебаний. За время Т фаза колебаний получает приращение 2π, т.е.
 (1.2)
(1.2)
Величина  , равная числу колебаний в единицу времени, называется частотой колебаний (измеряется в Герцах, 1Гц = 1/с). Тогда циклическая частота:
, равная числу колебаний в единицу времени, называется частотой колебаний (измеряется в Герцах, 1Гц = 1/с). Тогда циклическая частота:
Найдем скорость и ускорение колеблющейся величины  :
:
 (1.4)
(1.4)
 , (1.5)
, (1.5)
 т.е. имеем гармонические колебания той же частоты. Фаза скорости
т.е. имеем гармонические колебания той же частоты. Фаза скорости  отличается от фазы величины Х на
отличается от фазы величины Х на  , соответственно фаза ускорения — на π. Следовательно, в момент времени, когда колеблющаяся величина Х = 0, ее скорость V – максимальна, когда же Х достигает максимального отрицательного значения, то ускорение имеет наибольшее положительное значение (Рис. 1.1)
, соответственно фаза ускорения — на π. Следовательно, в момент времени, когда колеблющаяся величина Х = 0, ее скорость V – максимальна, когда же Х достигает максимального отрицательного значения, то ускорение имеет наибольшее положительное значение (Рис. 1.1)

Подставив в правую часть выражения (1.5) значение Х из (1), получим дифференциальное уравнение незатухающих гармонических колебаний.
 (1.6)
(1.6)
Решением этого уравнения является выражение (1.1).
Система, колебание которой описывается уравнением вида (1.6), называется гармоническим осциллятором. Большинство физических систем при малых отклонениях от положения равновесия ведут себя как гармонический осциллятор. Поэтому модель гармонического осциллятора является чрезвычайно важной для всех областей классической и квантовой физики. Примерами гармонического осциллятора являются пружинный маятник, математический и физический маятники, колебательный контур.
Гармонические колебания
О чем эта статья:
9 класс, 11 класс, ЕГЭ/ОГЭ
Механические колебания
Механические колебания — это физические процессы, которые точно или приблизительно повторяются через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Свободные колебания
Это колебания, которые происходят под действием внутренних сил в колебательной системе.
Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
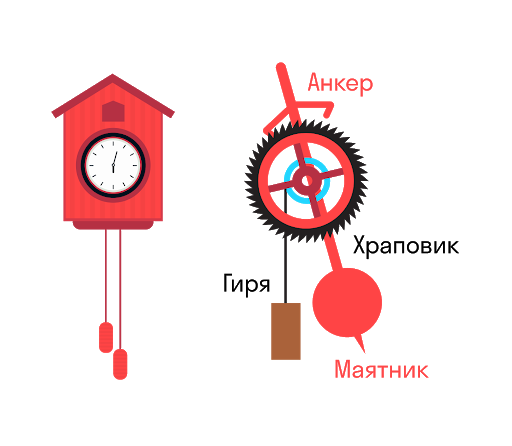
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
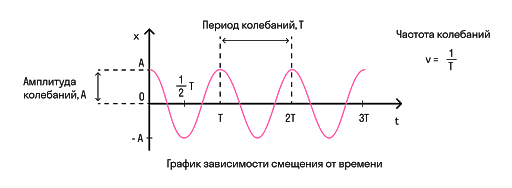
Характеристики колебаний
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо x max .
Она используется в уравнении гармонических колебаний:
Гармонические колебания
Простейший вид колебательного процесса — простые гармонические колебания, которые описывают уравнением:
Уравнение гармонических колебаний
x — координата в момент времени t [м]
t — момент времени [с]
(2πνt) в этом уравнении — это фаза. Ее обозначают греческой буквой φ
Фаза колебаний
t — момент времени [с]
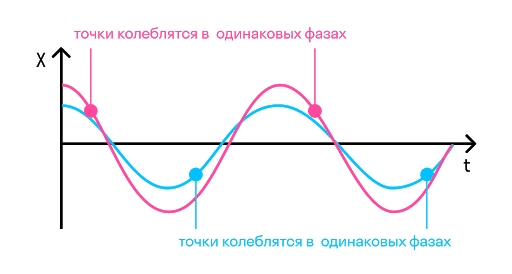
Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
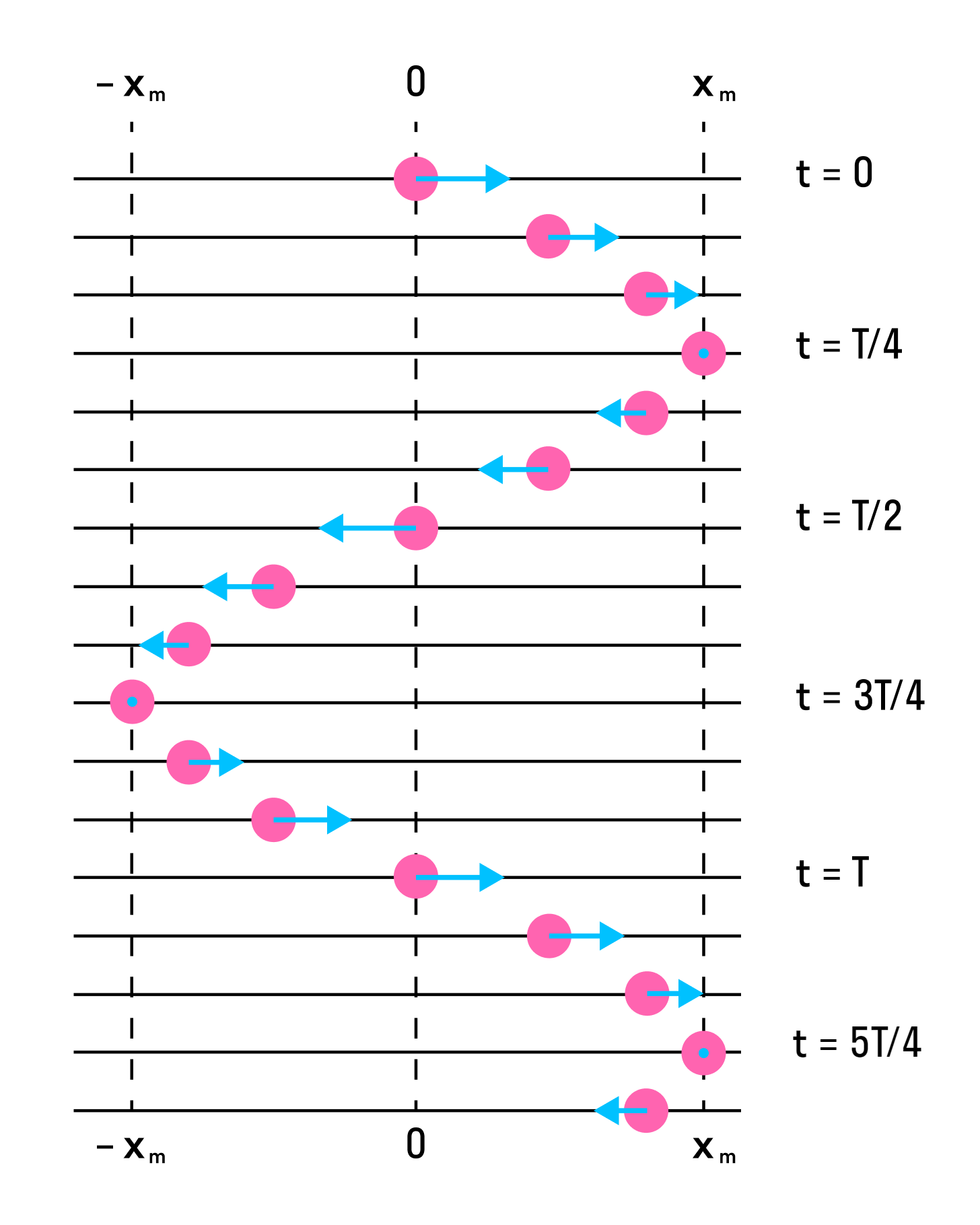
На рисунке ниже показаны положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
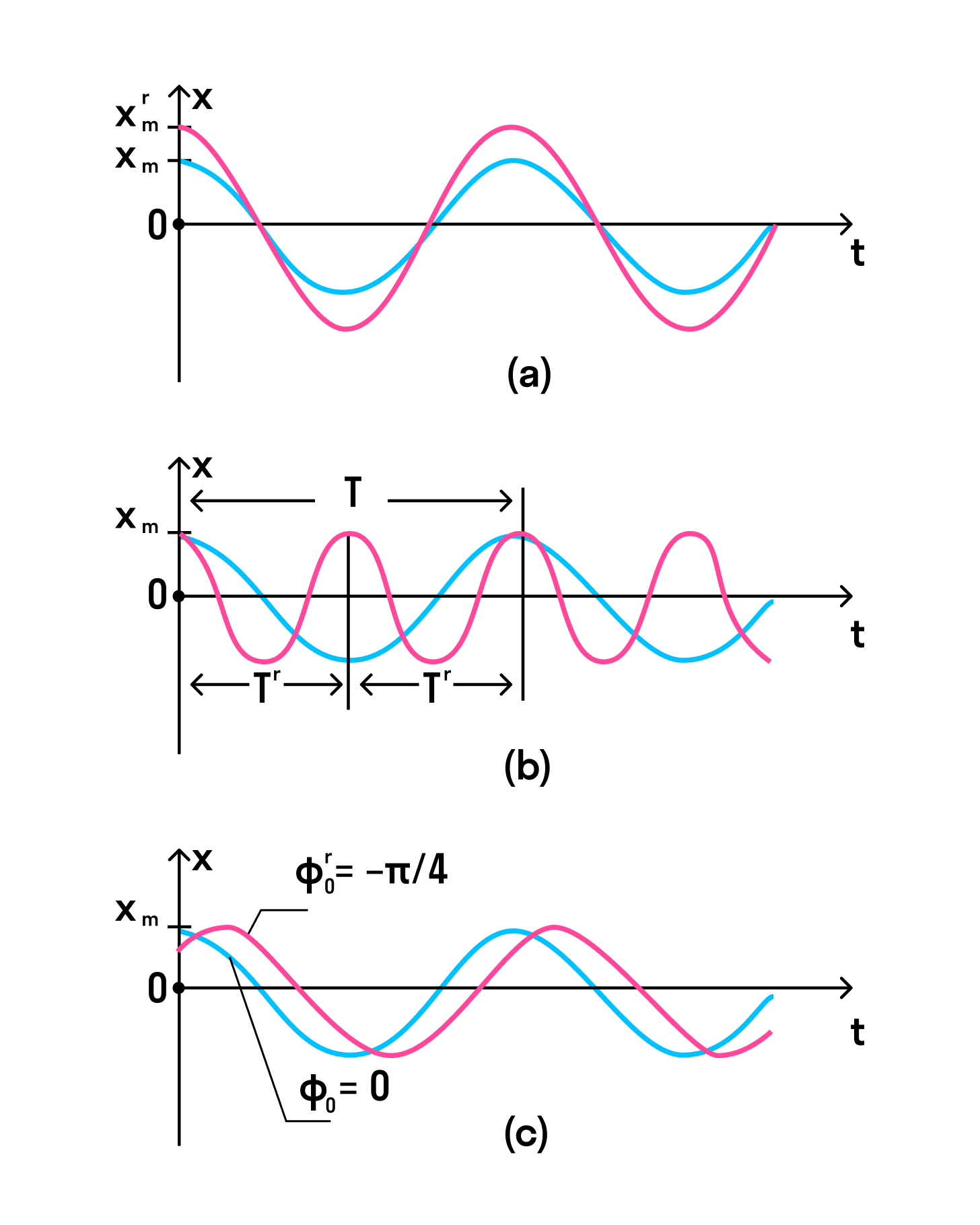
Если изменить период, начальную фазу или амплитуду колебания, графики тоже изменятся.
На рисунке ниже во всех трех случаях для синих кривых начальная фаза равна нулю, а в последнем (с) — красная кривая имеет меньшую начальную фазу.
В первом случае (а) красная кривая описывает колебание, у которого амплитуда больше колебания, описанного синей линией.
Во втором случае (b) красная кривая отличается от синей только значением периода — у красной период в два раза меньше.
Математический маятник
Математический маятник — отличный пример гармонических колебаний. Если мы подвесим шарик на нити, то это еще не будет математическим маятником — пока он только физический.
Математическим этот маятник станет, если размеры шарика много меньше длины нити (тогда этими размерами можно пренебречь и рассматривать шарик как материальную точку), растяжение нити очень мало, а масса нити во много раз меньше массы шарика.
Математическим маятником называется система, которая состоит из материальной точки массой m и невесомой нерастяжимой нити длиной l, на которой материальная точка подвешена, и которая находится в поле силы тяжести (или других сил).
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле:
Формула периода колебания математического маятника
l — длина нити [м]
g — ускорение свободного падения [м/с 2 ]
На планете Земля g = 9,8 м/с 2
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости.
Пока пружина не деформирована, сила упругости на тело не действует.
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
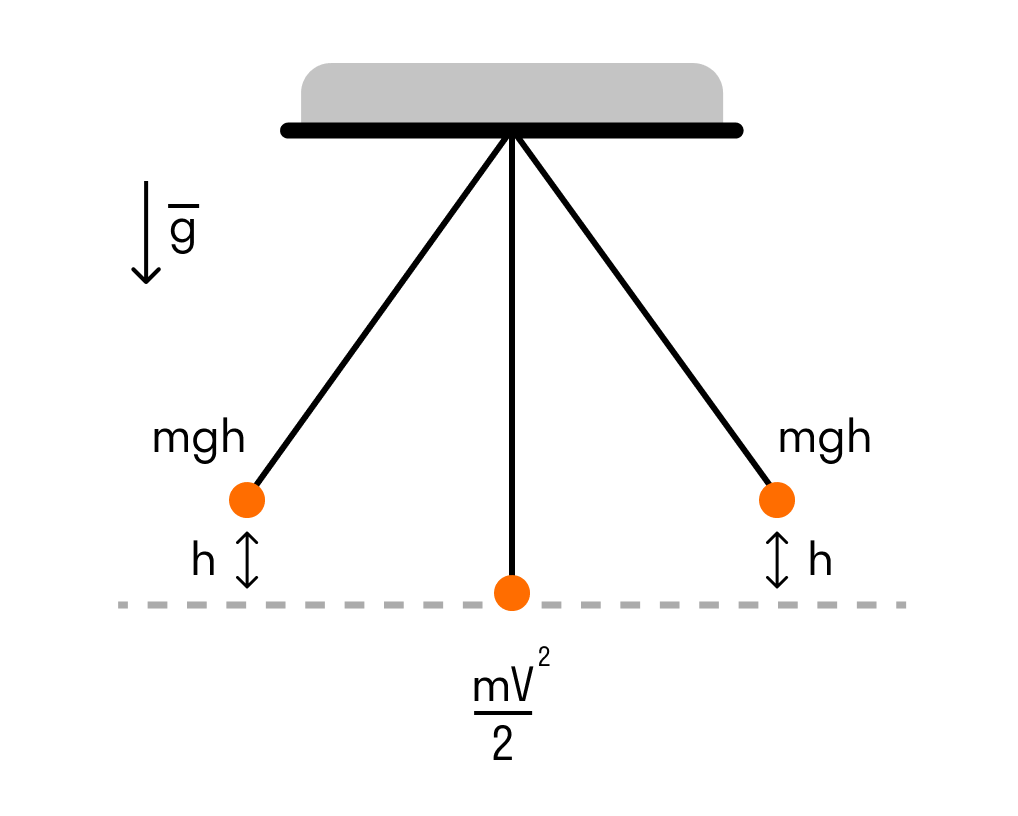
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Гармонические колебания. Кинематика гармонических колебаний. Свободные незатухающие колебания

Гармонические колебания. Кинематика гармонических колебаний. Свободные незатухающие колебания
Рассмотрим одномерное движение частицы массой m вдоль оси х под действием консервативной силы:
 , (3.0.1)
, (3.0.1)
где U(x) – потенциальная энергия частицы.
Согласно II-ому закону Ньютона уравнение движения частицы имеет вид:
 . (3.0.2)
. (3.0.2)
Нас интересуют возможные положения равновесия частицы, где скорость, ускорение и действующая на частицу сила равны нулю:
 (3.0.3)
(3.0.3)
Согласно (3.0.2) в положении равновесия производная потенциальной энергии по координате обращается в ноль,
 , (3.0.4)
, (3.0.4)
поэтому потенциальная энергия  в этих точках имеет экстремум и принимает либо максимальное, либо минимальное значение точки перегиба здесь не рассматривается. Максимум потенциальной энергии соответствует неустойчивому положению равновесия, поскольку при сколь угодно малом отклонении частицы от данного положения равновесия частица под действием силы
в этих точках имеет экстремум и принимает либо максимальное, либо минимальное значение точки перегиба здесь не рассматривается. Максимум потенциальной энергии соответствует неустойчивому положению равновесия, поскольку при сколь угодно малом отклонении частицы от данного положения равновесия частица под действием силы  будет удаляться от исходного положения. В точке минимума потенциальной энергии имеет место устойчивое положение равновесия. В этом случае частица, выведенная из положения равновесия внешним воздействием, стремится вернуться в исходное положение под действием возвращающей силы. При любом смещении частицы из положения устойчивого равновесия возвращающая сила всегда направлена к точке равновесия.
будет удаляться от исходного положения. В точке минимума потенциальной энергии имеет место устойчивое положение равновесия. В этом случае частица, выведенная из положения равновесия внешним воздействием, стремится вернуться в исходное положение под действием возвращающей силы. При любом смещении частицы из положения устойчивого равновесия возвращающая сила всегда направлена к точке равновесия.
Наше рассмотрение ограничено важным частным случаем движения частицы в малой окрестности устойчивого положения равновесия в точке х=0, когда потенциальная энергия описывается формулой:
 . (3.0.6)
. (3.0.6)
Здесь k>0 – постоянная величина.
Для этого случая уравнение движения частицы записывается следующим образом:
 , (3.0.7)
, (3.0.7)
 . (3.0.8)
. (3.0.8)
Перенесем член —kx в левую часть равенства с изменением знака и получим следующее уравнение
 . (3.0.9)
. (3.0.9)
Разделим левую и правую части полученного уравнения на массу m
 , (3.0.10)
, (3.0.10)
и введем обозначение  . В результате приходим к дифференциальному уравнению вида
. В результате приходим к дифференциальному уравнению вида
 . (3.0.11)
. (3.0.11)
Данное обыкновенное дифференциальное уравнение второго порядка по времени описывает механическую систему, которая называется гармоническим осциллятором. Примером гармонического осциллятора может служить шарик, подвешенный на вертикальной пружине.
Общее решение полученного дифференциального уравнения может быть записано в виде:
 , (3.0.12)
, (3.0.12)
где  – амплитуда гармонических колебаний,
– амплитуда гармонических колебаний,  – круговая, или циклическая частота колебаний, связанная с частотой колебаний
– круговая, или циклическая частота колебаний, связанная с частотой колебаний  . Аргумент косинуса называется фазой колебаний, а постоянная
. Аргумент косинуса называется фазой колебаний, а постоянная  — начальной фазой. При подстановке функции (3.0.12) в дифференциальное уравнение (3.0.11) это уравнение превращается в числовое тождество
— начальной фазой. При подстановке функции (3.0.12) в дифференциальное уравнение (3.0.11) это уравнение превращается в числовое тождество  .
.
Неизвестные величины А и находятся с помощью двух начальных условий, определяющих начальное состояние частицы и обычно задаваемых для момента времени t=0,
 ,
,  . (3.0.13)
. (3.0.13)
Из начальных условий (3.0.13) следует, что
 ,
,  . (3.0.14)
. (3.0.14)
Число начальных условий должно равняться числу неизвестных постоянных в общем решении обыкновенного дифференциального уравнения. В свою очередь число произвольных постоянных в общем решении обыкновенного дифференциального уравнения равно порядку этого уравнения, который определяется высшей производной искомой функции по времени.
Приведённое выше решение уравнения гармонического осциллятора описывает свободные незатухающие колебания. Смещение x, скорость V и ускорение a данных колебаний определяются формулами:
 , (3.0.15)
, (3.0.15)
 , (3.0.16)
, (3.0.16)
 . (3.0.17)
. (3.0.17)
В случае свободных незатухающих гармонических колебаний полная механическая энергия осциллятора Е сохраняется постоянной. Она равна сумме его кинетической
 (3.0.18)
(3.0.18)
 (3.0.19)
(3.0.19)
энергий. С учетом (3.0.12) выражение для полной энергии принимает вид:
 . (3.0.20)
. (3.0.20)
Здесь использовано соотношение .
Найти результирующее движение  в случае двух гармонических колебаний одинаковой частоты, происходящий вдоль оси х с амплитудами А и В.
в случае двух гармонических колебаний одинаковой частоты, происходящий вдоль оси х с амплитудами А и В.
1. Задача решается методом векторных диаграмм. Будем рассматривать смещение x как проекцию на ось x вектора постоянной длины A, который вращается с постоянной угловой скоростью  в плоскости X0Y вокруг точки x=y=0
в плоскости X0Y вокруг точки x=y=0
 , (3.1.1)
, (3.1.1)
где  . Формула (3.1.1) описывает гармонические колебания с циклической частотой , амплитудой A и начальной фазой вдоль оси x.
. Формула (3.1.1) описывает гармонические колебания с циклической частотой , амплитудой A и начальной фазой вдоль оси x.
2. Если частица одновременно участвует в двух гармонических колебаниях вдоль оси x, то для начального момента времени t=0 из одной точки x=y=0 строятся два вектора, положение и длина которых определяются соответственно амплитудой и начальной фазой этих колебаний. Суммарное движение частицы описывается вектором, равным сумме этих двух векторов.
3. Найдем графически сумму двух гармонических колебаний
 . (3.1.2)
. (3.1.2)
Из точки О, как показано на рис.3.1, построим два вектора, соответствующие гармоническим колебаниям в начальный момент времени t=0. Суммарный вектор  имеет длину
имеет длину
 (3.1.3)
(3.1.3)
и начальную фазу
 . (3.1.4)
. (3.1.4)

При t>0 все три вектора  вращаются с одинаковой угловой скоростью
вращаются с одинаковой угловой скоростью  , равной частоте гармонических колебаний. Проекция вектора на ось х описывает результирующее движение частицы в виде
, равной частоте гармонических колебаний. Проекция вектора на ось х описывает результирующее движение частицы в виде
 . (3.1.5)
. (3.1.5)
Ответ:  .
.
Частица совершает гармонические колебания около положения равновесия х=0 с циклической частотой  рад/с так, что в начальный момент времени t=0 её координата
рад/с так, что в начальный момент времени t=0 её координата  , а скорость
, а скорость  . Найдите смещение частицы x(t) как функцию времени t.
. Найдите смещение частицы x(t) как функцию времени t.
1. Общее выражение, описывающее гармонические незатухающие колебания, имеет вид:
. (3.2.1)
где А, и  — постоянные величины. Согласно условиям задачи известны циклическая частота
— постоянные величины. Согласно условиям задачи известны циклическая частота
рад/с (3.2.2)
и состояние частицы в момент времени t=0:
 , (3.2.3)
, (3.2.3)
 . (3.2.4)
. (3.2.4)
2. Из (3.2.3) и (3.2.4) получаем, что амплитуда колебаний
 (3.2.5)
(3.2.5)
и начальная фаза
 . (3.2.6)
. (3.2.6)
3. C учётом (3.2.5) и (3.2.6) выражение (3.2.1) принимает вид
 . (3.2.7)
. (3.2.7)
Ответ: , где время t измеряется в секундах.
Рассмотреть движение тела массой m=1 кг в колебательных системах 1 и 2, показанных на рисунках. Коэффициенты жёсткости пружины  и
и  . Массами пружин и трением можно пренебречь. Определите периоды
. Массами пружин и трением можно пренебречь. Определите периоды  и
и  гармонических колебаний тела в этих системах.
гармонических колебаний тела в этих системах.

Для расчёта механической колебательной системы необходимо: 1) найти положение равновесия системы, 2) проанализировать его устойчивость, записав выражение для силы, возникающей при смещении тела из положения равновесия и 3) получить уравнение движения тела в малой окрестности устойчивого положения равновесия, записав его в стандартной форме уравнения движения гармонического осциллятора.
Определим все силы, действующие на тело согласно условиям задачи: сила тяжести  , сила реакции опоры
, сила реакции опоры  , силы упругости деформированных пружин
, силы упругости деформированных пружин  и
и  . В нашем случае достаточно рассмотреть только горизонтальное движение тела, поскольку вертикально направленные силы взаимно скомпенсированы.
. В нашем случае достаточно рассмотреть только горизонтальное движение тела, поскольку вертикально направленные силы взаимно скомпенсированы.
Очевидно, что в обеих системах имеются положения равновесия, причем будем считать, что для системы 1 в положении равновесия обе пружины не деформированы. Для каждой системы введём ось х, вдоль которой происходит движение тела, и направим её слева направо. При этом примем, что положение равновесия находится в точке х=0.
1. Определим устойчивость положения равновесия. При смещении тела относительно равновесия пружины деформируется таким образом, что возникающие силы упругости обеих пружин направлены в одну сторону – к положению равновесия тела. Следовательно, формируется возвращающая сила и положение равновесия устойчивое.
2. Если смещение тела относительно положения равновесия х, полная сила упругости, действующая на тело,
 . (3.3.1)
. (3.3.1)
Здесь учитывается то обстоятельство, что смещения тела и прикреплённых к нему концов пружины одинаковые.
3. Согласно II закону Ньютона уравнение движения тела имеет вид:
 (3.3.2)
(3.3.2)
 , (3.3.3)
, (3.3.3)
 (3.3.4)
(3.3.4)
— циклическая частота и
 (3.3.5)
(3.3.5)
— период гармонических колебаний тела в системе 1.
1. Определим устойчивость положения равновесия. При смещении тела относительно положения равновесия пружины деформируются таким образом, что возникающие силы упругости обеих пружин направлены в одну сторону – к положению равновесия тела. Следовательно, формируется возвращающая сила и положение равновесия устойчивое.
2. Смещение х тела относительно положения равновесия равно сумме смещений правых концов обеих пружин
 , (3.3.6)
, (3.3.6)
при этом на тело действует сила упругости только пружины 2
 . (3.3.7)
. (3.3.7)
3. Согласно II закону Ньютона уравнение движения тела запишется в виде
 . (3.3.8)
. (3.3.8)
4. Поскольку пружины считаются невесомыми, то согласно III закону Ньютона для сил упругости пружин выполняется равенство
 (3.3.9)
(3.3.9)
 . (3.3.10)
. (3.3.10)
Тогда из (3.3.6) следует, что
 . (3.3.11)
. (3.3.11)
5. С учётом (3.3.11) уравнение движения запишется следующим образом
 (3.3.12)
(3.3.12)
 , (3.3.13)
, (3.3.13)
 (3.3.14)
(3.3.14)
— циклическая частота и
 (3.3.15)
(3.3.15)
— период гармонических колебаний тела в системе 2.
Согласно полученным результатам эквивалентная жёсткость k пружин в системе 1 определяется формулой
 ,
,
а в системе 2 — формулой
 .
.
Ответ: , .
http://skysmart.ru/articles/physics/garmonicheskie-kolebaniya
http://pandia.ru/text/80/245/58952.php