Черноуцан А.И. Кинематические связи в задачах динамики // Квант
Черноуцан А.И. Кинематические связи в задачах динамики // Квант. — 1988. — № 2. — С. 57-62.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
В задачах по механике часто встречается ситуация, когда движение тел не является свободным. Ограничения могут создавать твердые поверхности, нерастяжимые нити, жесткие стержни и т. п.
В простейших случаях мы учитываем подобные ограничения автоматически, часто даже не оговаривая их существования. Например, ускорение тела на плоскости мы направляем вдоль плоскости (учитывая наличие твердой поверхности), скорости буксира и баржи считаем одинаковыми (принимая во внимание присутствие нерастяжимого троса) и т. д. Однако иногда возникает необходимость выразить эти ограничения в виде специального уравнения, которое мы будем называть «кинематической связью». Начнем с такой задачи.
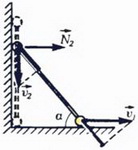
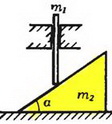
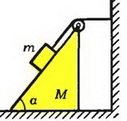
Задача 1. Найдите ускорения призмы массой m1 и куба массой m2, изображенных на рисунке 1, а. Трением пренебречь.
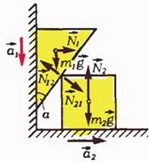
Запишем второй закон Ньютона для каждого тела (в проекции на направление, совпадающее с соответствующим ускорением):
Мы учли, что по третьему закону Ньютона  т. е. N12 = N21 = N. Написанные два уравнения содержат три неизвестных. Третье уравнение — кинематическая связь между а1 и a2 — должно отразить тот факт, что куб и призма остаются все время в контакте друг с другом. Это можно сделать несколькими способами.
т. е. N12 = N21 = N. Написанные два уравнения содержат три неизвестных. Третье уравнение — кинематическая связь между а1 и a2 — должно отразить тот факт, что куб и призма остаются все время в контакте друг с другом. Это можно сделать несколькими способами.
1) Рассмотрим два близких положения системы, разделенные промежутком времени Δt (рис. 1, б). В треугольнике ABC сторона АВ равна перемещению призмы Δx1, а сторона ВС — перемещению куба Δx2. Имеем
Разделив обе части равенства на Δt, получаем
Так как это соотношение справедливо для произвольного момента времени, из него следует искомое соотношение
Такой подход к получению кинематической связи будем называть прямым методом.
2) Другой способ получения необходимой связи основан на переходе в такую систему отсчета, где условие контакта становится тривиальным. В системе отсчета, связанной с призмой (см. рис. 1, б), скорость куба  направлена вдоль ее поверхности, т. е. под углом α к вертикали. Записывая закон сложения скоростей
направлена вдоль ее поверхности, т. е. под углом α к вертикали. Записывая закон сложения скоростей

из соответствующего векторного треугольника получаем
Решаем совместно уравнения (1)-(3) и находим

В этой задаче второй метод выглядит несколько искусственно. Однако в некоторых случаях именно правильный выбор системы отсчета позволяет существенно упростить проблему кинематических связей. Вот пример.
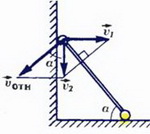
Задача 2. Клин высотой h с углом наклона α стоит на гладкой горизонтальной плоскости (рис. 2). Масса клина m1. С вершины клина начинает соскальзывать без трения брусок массой m2. Найдите ускорение клина и время соскальзывания бруска.
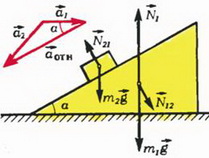
Начнем со второго закона Ньютона. Запишем его для клина в проекции на горизонтальное направление, а для бруска пока что в векторной форме:
 (5)
(5)
Как и раньше,  т. е. N12 = N21 = N. Выбор направления осей для бруска связан с решением вопроса о кинематической связи.
т. е. N12 = N21 = N. Выбор направления осей для бруска связан с решением вопроса о кинематической связи.
Кинематическая связь между ускорениями должна отразить тот факт, что в процессе движения брусок все время остается на поверхности клина. Записать это в виде прямого уравнения оказывается непросто. Вместо этого перейдем в систему отсчета, связанную с клином. В этой системе скорость бруска  и его ускорение
и его ускорение  направлены вдоль клина. Тогда из закона сложения скоростей
направлены вдоль клина. Тогда из закона сложения скоростей  получаем закон сложения ускорений (см. рис. 2)
получаем закон сложения ускорений (см. рис. 2)
 (6)
(6)
Отсюда видно, что от неизвестных a1 и a2 удобнее перейти к неизвестным a1 и aотн, решив тем самым проблему кинематической связи. Подставляя равенство (6) в уравнение (5) и проектируя это уравнение на направления вдоль поверхности клина и перпендикулярно к ней, получаем
Из уравнений (4), (5′) и (5″) находим

Для ответа на второй вопрос задачи нам не надо искать a1, так как время соскальзывания выражается как раз через aотн:
Как уже говорилось, ограничение на движение может определяться не только прямым контактом рассматриваемых тел, но и наличием в системе соединительных элементов — стержней, нитей и т. п. В большинстве случаев, даже если в условии это не оговорено, соединительные элементы считаются идеальными, т. е. нити — невесомыми и нерастяжимыми, стержни — невесомыми и абсолютно жесткими, для блоков кроме невесомости предполагается также отсутствие трения на оси. (На самом деле слово «невесомый» означает, что масса данного элемента пренебрежимо мала по сравнению с массами других тел системы, слово «нерастяжимый» — что удлинение элемента мало по сравнению с перемещениями тел системы и т. д.) Перед тем, как разбирать конкретные примеры, выясним, что следует из идеальности соединительных элементов. Рассмотрим три частных случая.
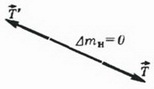
1. Невесомость нити. Напишем второй закон Ньютона для участка нити массой Δmн (рис. 3, а):
Так как Δmн = 0, то T – T´, т. е. сила натяжения не меняется вдоль нити.
2. Невесомость подвижного блока и отсутствие трения на его оси. Для раскручивания невесомого блока, в котором нет трения, не нужен вращательный момент. Из этого следует, что натяжение одной и той же нити по обе стороны блока одинаково (рис. 3, б), кроме того
3. Невесомость стержня. Это условие означает, что сумма сил и сумма моментов сил, действующих на стержень, равны нулю. Например, если к стержню приложены две силы, то они равны по модулю, противоположны по направлению и действуют вдоль стержня (рис. 3, в). (В отличие от нити, стержень может быть не только в растянутом, но и в сжатом состоянии.)


Нерастяжимость и жесткость нитей и стержней приводит к появлению кинематических связей, которые мы разберем отдельно в следующих задачах.
Задача 3. Найдите ускорения грузов массой m1 и m2 после перерезания верхней нити (рис. 4). Нити и блок считать идеальными.
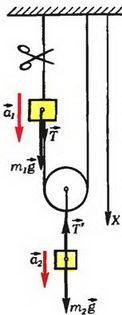
Выберем положительное направление оси вертикально вниз и запишем второй закон Ньютона для обоих тел:
(мы учли свойства блока и нити, описанные выше).
Для нахождения кинематической связи между a1 и а2 применим, как мы его назвали, прямой метод. Запишем длину нити в виде
где х1 — координата груза массой m1, x2 — координата центра блока, R — его радиус, и учтем, что длина нити при движении грузов не изменяется. Тогда для перемещений грузов получим соотношение
Решая уравнения (7)-(9) совместно, находим
(Обратите внимание на то, что a1 > g. Подумайте, почему получился такой ответ.)
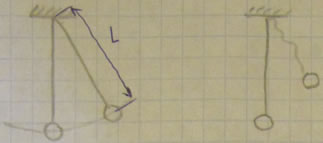
Задача 4. Невесомый стержень с одинаковыми грузами массой m на концах шарнирно закреплен на оси, которая делит его длину в отношении 2:1 (рис. 5). Стержень удерживают в горизонтальном положении и в некоторый момент освобождают. Найдите ускорения грузов сразу после этого, а также давление стержня на ось в этот момент.
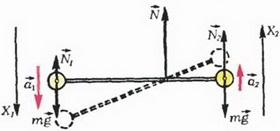
Запишем второй закон Ньютона для грузов, выбрав положительные направления осей в сторону соответствующих ускорений:
где N1 и N2 — силы, действующие на грузы со стороны стержня. Так как сумма моментов сил, действующих на невесомый стержень, равна нулю, то
где l — длина стержня. Отсюда
Осталось записать кинематическую связь между a1 и а2. Для этого изобразим на рисунке 5 положение стержня через малый промежуток времени Δt после начала движения. Из подобия получаем
Решая совместно уравнения (10)-(13), находим

Так как сумма сил, действующих на невесомый стержень, равна нулю, то сила реакции оси (равная по модулю силе давления на ось) равна
Во многих задачах, рассчитанных на применение закона сохранения энергии, требуется найти скорости тел к определенному моменту времени. В этом случае надо установить кинематические связи не между ускорениями, а между скоростями тел. При решении таких задач полезно использовать тот факт, что полная работа, совершаемая любым идеальным соединительным элементом, равна нулю. Физическая причина этого состоит в том, что в таком элементе не может запасаться никакая энергия — ни кинетическая (его масса равна нулю), ни потенциальная (элемент не деформируется).
Последнее утверждение требует пояснения. Может показаться, что даже при малой деформации очень жесткого стержня (или другого элемента) потенциальная анергия его деформации  может быть велика — ведь она пропорциональна жесткости стержня k. Но если учесть, что сила F = k·x, возникающая при деформации, остается конечной при
может быть велика — ведь она пропорциональна жесткости стержня k. Но если учесть, что сила F = k·x, возникающая при деформации, остается конечной при  (она определяется движением тел, закрепленных на стержне), то потенциальная энергия
(она определяется движением тел, закрепленных на стержне), то потенциальная энергия  при больших k оказывается очень малой.
при больших k оказывается очень малой.
Эта и следующая задачи по своему уровню несколько выходят за пределы задач, предлагаемых обычно на вступительных экзаменах в вузы. Однако знакомство с ними для абитуриентов окажется небесполезным.
Задача 5. Груз массой М сначала удерживают на уровне блоков, а затем освобождают (рис. 6). Считая нити и блоки идеальными, размеры блоков малыми по сравнению с расстоянием 2l между ними, а массу m грузиков, висящих на концах нитей, известной, найдите скорость груза в тот момент, когда нити составляют угол α с вертикалью. Полученный ответ исследуйте.
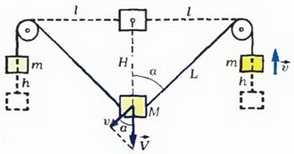
К рассматриваемому моменту груз массой М опустился на H = l·ctg α, а грузики массой m поднялись на  каждый. Согласно закону сохранения энергии,
каждый. Согласно закону сохранения энергии,
 (14)
(14)
Для того чтобы найти связь между υ и V, можно, например, применить прямой метод. Из рисунка 6
Дифференцируя по времени (и учитывая, что l´ = 0), находим
Так как L´ = υ, H´ = V, a H/L = cos α, то получаем искомую связь
Однако проще получить это соотношение из следующих соображений. Раз расстояние L от груза массой М до блока в рассматриваемый момент увеличивается со скоростью υ (с такой скоростью вытягивается нить), то проекция скорости  этого груза на направление нити должна быть равна υ. Учитывая, что скорость направлена вертикально, получаем уравнение (15).
этого груза на направление нити должна быть равна υ. Учитывая, что скорость направлена вертикально, получаем уравнение (15).
Из уравнений (14) и (15) находим
Выясним, будет ли центральный груз все время опускаться (мы считаем нити очень длинными) или при каком-то α он остановится и начнет подниматься. Уравнение V = 0 (условие остановки) преобразуется к виду
т. е. остановка и обратное движение грузов происходят только при М 2m, то центральный груз будет все время перевешивать и его скорость будет неограниченно возрастать (  при
при  — проверьте это сами). Если же М = 2m, то при опускании центрального груза система все ближе подходит к равновесию, ускорения грузов стремятся к нулю, а их скорости — к предельному значению
— проверьте это сами). Если же М = 2m, то при опускании центрального груза система все ближе подходит к равновесию, ускорения грузов стремятся к нулю, а их скорости — к предельному значению  (убедитесь в этом самостоятельно).
(убедитесь в этом самостоятельно).
Хотелось бы обратить внимание на то, что при использовании закона сохранения энергии сила натяжения нити вообще не вошла в расчеты.
Последний пример иллюстрирует методы получения кинематических связей при движении твердых стержней (или других твердых связей). Напомним, что при движении твердого тела расстояние между любыми двумя его точками не изменяется.
Задача 6. Невесомый стержень длиной l с грузами массой m на концах соскальзывает по сторонам прямого двугранного угла (рис. 7, а). Найдите скорости грузов в тот момент, когда стержень составляет с горизонтом угол α. Трения нет. В начальный момент стержень находился в вертикальном положении.
Из закона сохранения энергии получаем
 (16)
(16)
где y = l·sin α — координата второго груза в рассматриваемый момент. Для получения кинематической связи можно применить прямой метод, как это было сделано в предыдущей задаче (проделайте это сами). Быстрее же и нагляднее кинематическая связь получается из таких соображений. Раз расстояние между грузами остается неизменным, то в каждый момент скорость, с которой первый груз «удаляется» от второго, равна скорости, с которой второй груз «приближается» к первому. Иначе говоря, проекции скоростей грузов на стержень в любой момент времени одинаковы (см. рис. 7, a):
Подставляя (17) в (16), находим

В кинематике твердого тела часто используется «разложение» сложного движения на поступательное и вращательное. Чтобы продемонстрировать этот метод, применим его для получения кинематической связи (17). В системе отсчета, связанной с первым грузом, стержень совершает чисто вращательное движение. Значит, в этой системе скорость второго груза  направлена перпендикулярно стержню. Применяя закон сложения скоростей
направлена перпендикулярно стержню. Применяя закон сложения скоростей  (см. рис. 7, б), получаем соотношение (17).
(см. рис. 7, б), получаем соотношение (17).
Может показаться, что найденные выражения для скоростей дают полное решение задачи. Однако в этой задаче содержится поучительный подвох, разбором которого мы и закончим статью.
Решение было бы полным, если бы второй груз не мог оторваться от вертикальной стены. (Для этого можно было бы, например, посадить грузы на гладкие штанги, а стержень присоединить к ним шарнирно). Однако в нашем варианте задачи (см. рис. 7, а) при некотором угле произойдет отрыв второго груза от вертикальной стены, после чего найденный ответ будет неприменим. Дело в том, что горизонтальный импульс системы определяется только движением первого груза, скорость которого, в соответствии с выражением для υ1, до некоторого угла возрастает, а потом начинает убывать. Это означает, что в какой-то момент должна изменить направление внешняя горизонтальная сила, действующая на систему. Но есть только одна горизонтальная сила — сила реакции вертикальной стенки, которая не может изменить свое направление. Таким образом, в тот момент, когда реакция стенки обращается в нуль, происходит отрыв второго груза от стенки. Дифференцируя выражение для υ1 по времени, находим, что υ1 максимальна при sin α = 2/3. При угле  и происходит отрыв стержня от вертикальной стенки.
и происходит отрыв стержня от вертикальной стенки.
1. Найдите ускорения стержня и клина, изображенных на рисунке 8. Трения нет.
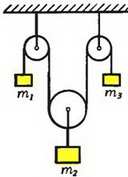
2. Найдите натяжение нити в системе, изображенной на рисунке 9.
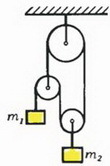
3. (для любителей каверз и ловушек). Чему равны ускорения грузов в системе, изображенной на рисунке 10?
4. Найдите ускорение клина на рисунке 11. Трения нет. Указание. Примените метод, использованный при решении задачи 2 в статье.
1. 
2. 
4. 
Кинематические связи
Кинематические связи – уравнения, связывающие между собой кинематические характеристики (координата, скорость, ускорение) тел системы.
Зачастую связи между кинематическими характеристиками различных тел системы возникают благодаря замене реальных тел на физические модели. Физическая модель – это упрощенная версия некоторого явления или тела, которая сохраняет свойства этого явления или тела, исследуемые в данной задаче.
Разберем наиболее распространенные физические модели и кинематические связи, появляющиеся при их использовании.
1. Модель абсолютно твердого тела (АТТ).
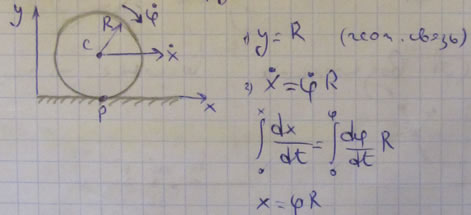
Абсолютно твердым телом называется тело, расстояние между  любыми двумя точками которого постоянно. Надо понимать, что указанное свойство присуще абсолютно твердому телу всегда, независимо от взаимодействия его с другими телами и от способа движения этого тела. Поэтому если мы рассмотрим две произвольные точки АТТ \(A\) и \(B\) , то в любой момент времени проекции скоростей этих точек \(V_
любыми двумя точками которого постоянно. Надо понимать, что указанное свойство присуще абсолютно твердому телу всегда, независимо от взаимодействия его с другими телами и от способа движения этого тела. Поэтому если мы рассмотрим две произвольные точки АТТ \(A\) и \(B\) , то в любой момент времени проекции скоростей этих точек \(V_
Если рассмотреть две оси, — \(y\) и \(z\) — перпендикулярные  скоростям \(V_A\) и \(V_B\) точек \(A\) и \(B\) соответственно и проходящие через эти точки, и точку пересечения этих осей обозначить как \(O\) (см. рисунок 2), то, записывая аналогичные (1) уравнения кинематической связи для точек \(O\) и \(A\) на оси \(y\) и \(O\) и \(B\) на оси \(z\) , получим:
скоростям \(V_A\) и \(V_B\) точек \(A\) и \(B\) соответственно и проходящие через эти точки, и точку пересечения этих осей обозначить как \(O\) (см. рисунок 2), то, записывая аналогичные (1) уравнения кинематической связи для точек \(O\) и \(A\) на оси \(y\) и \(O\) и \(B\) на оси \(z\) , получим:
Отсюда следует, что скорость точки \(O\) равна нулю: \(V_O=0\) . Такой показатель скорости, а также то обстоятельство, что вокруг точки \(O\) в данный момент происходит вращение, позволяют назвать точку \(O\) мгновенным центром вращения (МЦВ) изучаемого нами тела. Стоит понимать, что с течением времени положение МЦВ в пространстве способно изменяться, и к тому же он не обязан быть одной из точек тела и может лежать вне его (например, МЦВ колеса автомобиля при торможении).
В силу того, что тело вращается вокруг точки \(O\) , для описания его вращения можно использовать понятия угла поворота \(φ\) , угловой скорости \(ω\) и углового ускорения \(ε\) . Учитывая тот факт, что расстояние между любыми двумя точками тела постоянно, для любых двух точек \(A\) и \(B\) , находящихся на одинаковом расстоянии от МЦВ, мы вправе записать:
а для любых двух точек \(B\) и \(C\) , лежащих на одной прямой с точкой \(O\) на расстояниях \(OB=r\) и \(OC=R\) , следующее:
Выражения (2) и (3), как и предыдущие, являются уравнениями кинематической связи. Геометрическая интерпретация уравнения (3) представлена на рисунке 2: скорости и расстояния являются катетами подобных прямоугольных треугольников.
2. Нерастяжимая нить.
Нерастяжимая нить – это частный случай, разновидность абсолютно твердого тела, в которой расстояние между точками сохраняется вдоль единственного направления – контура нити. Для этой модели равными будут проекции скоростей любых двух точек \(A\) и \(B\) на направление нити в данных точках, что является следствием уравнения (1):
Разберем пример задачи с использованием кинематических связей.
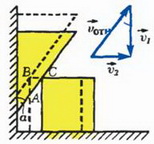
Задача 1 («3800 задач по физике для школьников  и поступающих в вузы», 1.90º). Тяжелый ящик перемещают с помощью двух тракторов, движущихся со скоростями \(\overrightarrow
и поступающих в вузы», 1.90º). Тяжелый ящик перемещают с помощью двух тракторов, движущихся со скоростями \(\overrightarrow
Решение задачи 1.
Точка \(O\) (см. рисунок 4) является точкой ящика, движущегося  поступательно, поэтому для определения скорости ящика достаточно найти скорость этой точки. В то же время \(O\) — это точка обоих канатов, поэтому ее скорость \(v\) удовлетворяет двум уравнениям кинематической связи, для каждого из канатов. Введя угол \(β\) между скоростями \(v\) и \(v_1\) , можно записать эти уравнения в виде:
поступательно, поэтому для определения скорости ящика достаточно найти скорость этой точки. В то же время \(O\) — это точка обоих канатов, поэтому ее скорость \(v\) удовлетворяет двум уравнениям кинематической связи, для каждого из канатов. Введя угол \(β\) между скоростями \(v\) и \(v_1\) , можно записать эти уравнения в виде:
\(\begin
Разделив первое уравнение системы (4) на второе, получим:
Особенно важными являются задачи, в которых фигурируют системы блоков. Написание уравнения кинематической связи при их решении является нетривиальной проблемой. Рассмотрим два основных способа получения уравнения кинематической связи на примере простейшей задачи с блоками.
Задача 2 («Задачи по физике» под ред. О.Я. Савченко, 1.5.1.).
Скорость груза \(A\) (см. рисунок 5) равна \(v_A\) . Чему равна скорость груза \(B\) ?
Решение задачи 2.
Способ 1. Уравнение длины нити.

Введем ось \(x\) , направленную, как на рисунке 6. Введем обозначения: \(x_1\) – координата подвижного блока, \(x_2\) – координата неподвижного блока, \(x_B\) – координата груза \(B\) . Тогда, приняв длину зеленой нити за \(L\) , рассмотрим два близких момента времени \(t\) и \(t’\) ( \(t’-t=∆t→0\) ) и запишем:
\(\begin
где \(R_1\) и \(R_2\) – радиусы блоков. Вычитаем из первого уравнения системы (5) второе и делим результат на \(∆t\) . Получаем:
Таким образом, мы вывели уравнение кинематической связи (6) для грузов \(A\) и \(B\) , где \(v_A\) и \(v_B\) – проекции скоростей грузов на ось \(x\) (то есть уравнение (6) связывает также направления скоростей грузов). Аналогичную связь можно записать и для ускорений грузов, если рассмотреть изменение скорости за некоторый период времени точно так же, как мы рассматривали изменение координаты.
Способ 2. Метод малых (виртуальных) перемещений.
Представим мысленно, что за некоторый малый промежуток времени \(∆t\) груз \(A\) сместился вниз на расстояние \(∆x\) (см. рисунок 7). Для того чтобы такое смещение произошло, вертикальные участки зеленой нити должны увеличиться на \(∆x\) справа и слева от подвижного блока. В нашей системе длина нити в левой части системы увеличилась на \(2∆x\) . Из-за этого в силу нерастяжимости нити длина нити в правой части системы должна уменьшиться на \(2∆x\) , а это означает, что груз \(B\) за интервал времени \(∆t\) сместится вверх на расстояние \(2∆x\) . Таким образом:
Разделив обе части уравнения (7) на \(∆t\) , получим:
Мы получили уравнение кинематической связи, аналогичное уравнению (6), но в этот раз не учитывающее направление скоростей. Направление скоростей мы учли при выводе этого уравнения.
Список использованной литературы:
- «3800 задач по физике для школьников и поступающих в вузы».
- «Задачи по физике» под редакцией О.Я. Савченко.
Задачи для самостоятельного решения:
1) «Задачи по физике» под редакцией О.Я. Савченко.
1.5.4, 1.5.5*, 1.5.9*, 1.5.14*, 1.5.16
2) «Задачи Московских городских олимпиад по физике. 1986-2005» Варламов С.Д. и др.
3) «1001 задача по физике с решениями» Гельфгат И.М. и др.
Вопросы по содержанию статьи:
1) Выберите верное уравнение кинематической связи для двух  точек АТТ, изображенного на рисунке.
точек АТТ, изображенного на рисунке.
2) Где находится МЦВ колеса, движущегося горизонтально без проскальзывания?
II. \(B\) . 
3) Зависит ли положение МЦВ тела в пространстве от системы отсчета, в которой мы рассматриваем движение данного тела?
Кинематическими называют связи уравнения которых
Связи и их классификация.
Связь называется удерживающей (двухсторонней), если она описывается уравнением (равенством). Голономную стационарную удерживающую связь, наложенную на материальную точку, можно представить в виде двух бесконечно близких одинаковых поверхностей, между которыми только и может находиться точка. Неудерживающая (односторонняя) связь описывается неравенством. Например, если математический маятник представляет собой тонкий стержень длиной l, вращающийся вокруг неподвижной оси и к свободному концу которого прикреплен груз (материальная точка), то связь для груза будет удерживающая. Если же груз прикреплен к свободному концу нерастяжимой нити длиной l. то связь будет неудерживающая, поскольку груз может находиться как на поверхности сферы радиусом l, так и внутри нее.
Механическая система, точки которой могут занимать любое положение в пространстве и иметь любые скорости, называется свободной. Например, свободной системой является космический аппарат, движущийся по орбите вокруг Земли. Его движение не ограничено другими телами и поэтому, прикладывая к аппарату соответствующие силы, можно изменять траекторию его центра масс и поворачивать аппарат вокруг центра масс. Если на координаты и скорости точек системы наложены ограничения, то система называется несвободной, а ограничения называются связями. Механические связи реализуются в виде различных устройств или тел (стержни, нити, шарниры и т. п.). Аналитически связь описывается уравнением вида:  .
.
Ограничивая движение механической системы, связи действуют на ее точки посредством сил, которые называются реакциями
связей. При изучении равновесия и движения механических систем методами аналитической механики применяется принцип
освобождения (аксиома о связях). Этот принцип состоит в том, что любую систему можно рассматривать как свободную, приложив к ее точкам реакции, соответствующие отброшенным связям.
Связи называются галономными, если они описываются уравнениями вида: 
Такие связи накладывают ограничения на координаты точек, а значит, на положение системы в пространстве. Это так называемые геометрические связи. Вместе с тем голономные связи накладывают ограничения и на скорости точек системы. Соответствующие условия получаются в результате дифференцирования уравнений (18.1) по времени:

Голономные связи могут описываться и дифференциальными уравнениями, однако последние обязательно должны быть интегрируемыми.
Неголономными называются связи, которые описываются уравнениями вида:

Уравнения (18.2), в отличие от уравнений голономных связей, не могут быть проинтегрированы независимо от дифференциальных уравнений движения системы. Неголономные связи накладывают ограничения (18.2) на скорости точек, поэтому их называют кинематическими.
Связи подразделяются на стационарные и нестационарные в зависимости от того, входит в явном виде время в уравнение связи или нет. Связь, уравнение которой имеет вид  , является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким:
, является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким:  .
.
Например, жесткий стержень длиной l, прикрепленный к неподвижной опоре, является стационарной связью для материальной точки, находящейся на его свободном конце. Уравнение связи в декартовой системе координат, начало которой совпадает с точкой закрепления стержня, имеет вид  .
.
(При вращении стержня вокруг опоры точка находится на сфере радиусом l.) Если длина стержня изменяется по заданному закону, то связь является нестационарной и ее уравнение  .
.
Связь называется удерживающей (двухсторонней), если она описывается уравнением (равенством). Голономную стационарную удерживающую связь, наложенную на материальную точку, можно представить в виде двух бесконечно близких одинаковых поверхностей, между которыми только и может находиться точка. Неудерживающая (односторонняя) связь описывается неравенством. Например, если математический маятник представляет собой тонкий стержень длиной l, вращающийся вокруг неподвижной оси и к свободному концу которого прикреплен груз (материальная точка), то связь для груза будет удерживающая. Если же груз прикреплен к свободному концу нерастяжимой нити длиной l. то связь будет неудерживающая, поскольку груз может находиться как на поверхности сферы радиусом l, так и внутри нее.
Из лекций:
Связи — условия, ограничивающие свободу перемещения материальной точки.
f(x,y,z,x · ,y · ,z · ,x · · ,y · · ,z · · ,t)=0
Классификация связей:
1) Геометрические связи.
2) Кинематические связи.
a) интегрируемые; (геометрические, интегрируемые кинематические = голономные)
б) неинтегрируемые; (геометрические, неинтегрируемые кинематические = неголономные)
3) Стационарная связь (склерономная).
Если t входит в уравнение явным образом, то связь нестационарная (реономная).
4) Освобождающие и неосвобождающие связи.
(неосвобождающая связь) ; (освобождающая связь)
x 2 +y 2 +z 2 =l 2 ; x 2 +y 2 +z 2 2
5) Идеальные и реальные связи.
Возможная работа — элементраная работа силы на возможном перемещении.
dA=Fdr — элементарная работа силы (F и r — векторы)

Если у какой-то связи  (RK тоже вектор), то связь называется идеальной.
(RK тоже вектор), то связь называется идеальной.
Если вся сумма  , то механическая система с идеальными связями.
, то механическая система с идеальными связями.
Реальные связи:  .
.
Примеры идеальных связей: внутренние связи в абсолютно твердых телах; абсолютно гладкие поверхности; шарниры без трения; нерастяжимые нити; закрепленные точки; качение без скольжения.
Примеры реальных связей: шероховатая поверхность; шарниры с трением; упругие растяжимые нити; пружины; качение с проскальзыванием.
Замечание: всякую реальную связь можно сделать идеальной.
http://moscowinners.ru/proektyi/sverxurochnyie/fizika/stati/kinematicheskie-svyazi.html
http://extm10.narod2.ru/sem4/ev/01.html