Формула кинетической энергии
Определение и формула кинетической энергии
Кинетическую энергию тела определяют при помощи работы, которая совершается телом при его торможении от начальной скорости, до скорости, равной нулю.
Кинетическая энергия тела – мера механического движения тела. Она зависит от относительной скорости тел.
Встречаются следующие обозначения кинетической энергии: Ek,Wk,T.
Работу, которую производят над телом (A’) можно связать с изменением его кинетической энергии:
Кинетическая энергия материальной точки и тела
Кинетическая энергия материальной точки равна:
где m – масса материальной точки, p – импульс материальной точки, v – скорость ее движения. Кинетическая энергия является скалярной физической величиной.
Если тело нельзя принять за материальную точку, то его кинетическая энергия рассчитывается как сумма кинетических энергий всех материальных точек, которые составляют исследуемое тело:
где dm – элементарный участок тела, который можно считать материальной точкой, dV – объем выделенного элементарного участка тела, v – скорость перемещения рассматриваемого элемента, $\rho$ — плотность участка, m–масса всего рассматриваемого тела, V – объем тела.
В том случае, если тело (отличное от материальной точки) движется поступательно, то его кинетическую энергию можно рассчитать, применяя формулу (2), в которой все параметры отнесены к телу в целом.
При вращении тело вокруг неподвижной оси его кинетическую энергию можно вычислить, применяя формулу:
где J – момент инерции тела по отношению к оси вращения, ?–модуль угловой скорости вращения тела, r – расстояние от элементарного участка тела до оси вращения, L – проекция момента импульса вращающегося тела на ось во круг которой идет вращение.
Если твердое тело совершает вращение относительно неподвижной точки (например, точки O), то его кинетическую энергию находят как:
$$E_
Единицы измерения кинетической энергии
Основной единицей измерения кинетической энергии (как и любого другого вида энергии) в системе СИ служит:
в системе СГС –[Ek]= эрг.
При этом: 1 дж= 10 7 эрг.
Теорема Кенига
Для самого общего случая при расчете кинетической энергии применяют теорему Кенига. В соответствии с которой, кинетическая энергия совокупности материальных точек есть сумма кинетической энергии поступательного перемещения системы со скоростью центра масс (vc) и кинетической энергии (E’k) системы при ее относительном движении к поступательному перемещению системы отсчета. При этом начало системы отсчета связывают с центром масс системы. Математически данную теорему можно записать как:
Так, если рассматривать твердое тело, то его кинетическую энергию можно представить как:
где Jc — момент инерции тела по отношению к оси вращения, проходящей через центр масс. В частности, при плоском движении Jc=const.В общем случае, ось (она называется мгновенной) перемещается в теле, тогда момент инерции является переменным во времени.
Примеры решения задач
Задание. Какова работа, которая производится над телом за t=3 c (с начала отсчета времени), при силовом взаимодействии, если изменение кинетической энергии исследуемого тела задано графиком (рис.1)?
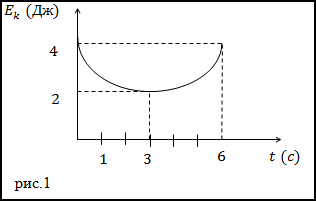
Решение. По определению изменение кинетической энергии равно работе (A’), которая производится над телом при силовом взаимодействии, то есть можно записать, что:
Исследуя график, приведенный на рис.1 мы видим, что за время t=3 c кинетическая энергия тела изменяется от 4 Дж до 2 Дж, следовательно:
Кинетическая энергия материальной точки


Кинетическая энергия
- Точка и система кинетической энергии. Кинетическая энергия материальной точки называется половиной произведения точечной массы и квадрата ее скорости, т.е. mv2 / 2 или mv2 / 2. Это потому, что скалярный квадрат любого вектора равен квадрату модуля этого вектора. Кинетическая энергия представляет собой положительное количество скаляров. В СИ единица кинетической энергии равна Джоулям: 1 Дж = 1 Нм. Кинетическая энергия системы T является суммой кинетической энергии всех точек механической системы. гипосульфит.
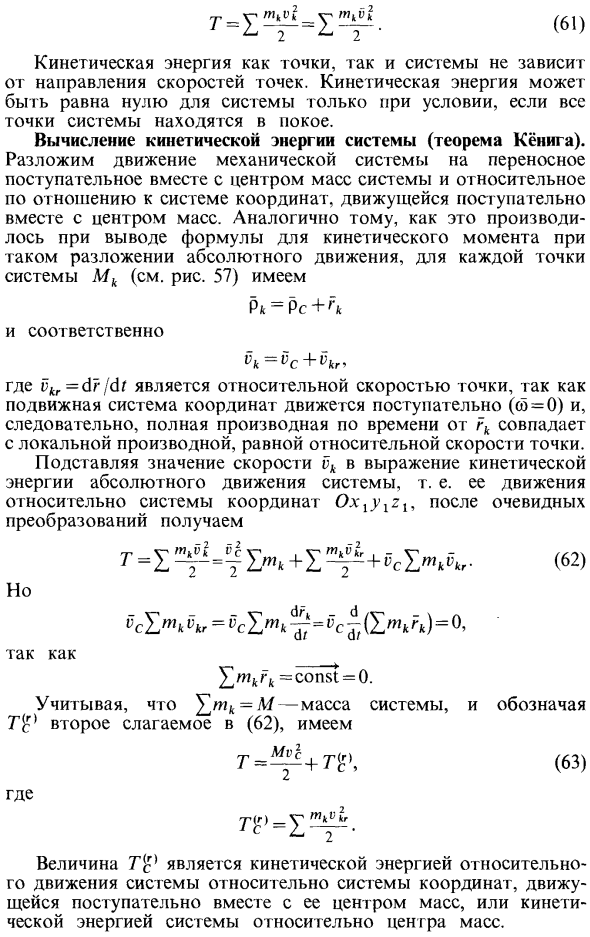
Кинетическая энергия как точки, так и системы не зависит от направления скорости точки. Только когда все точки системы неподвижны, кинетическая энергия системы равна нулю. Расчет кинетической энергии системы (теорема Кенига). Движение механической системы разлагается на поступательный перевод с центром тяжести системы, а система координат, которая переводится с центром тяжести, используется в качестве эталона. Для каждой точки в системе Mk (см. Рис. 57), а также того, как это было сделано при выводе формулы момента движения с таким расширением абсолютного движения, P * = Pc + ‘!
Известно, что по инерции без действия сил материальные точки могут двигаться с постоянной скоростью по прямой, а твердые тела-вращаться вокруг неподвижной оси с постоянной угловой скоростью. Людмила Фирмаль
В соответствии с этим Где v ^ —dr / dt — относительная скорость точки. Это происходит потому, что движущаяся система координат движется постепенно (ω = 0), поэтому полная производная по времени от rk соответствует локальной производной, равной относительной скорости точки. Подставляя значение скорости vk в кинетическую энергию абсолютного движения системы, то есть кинетическую энергию относительного движения относительно системы координат Ox1u121, получается очевидное преобразование. но с того времени = const = 0.
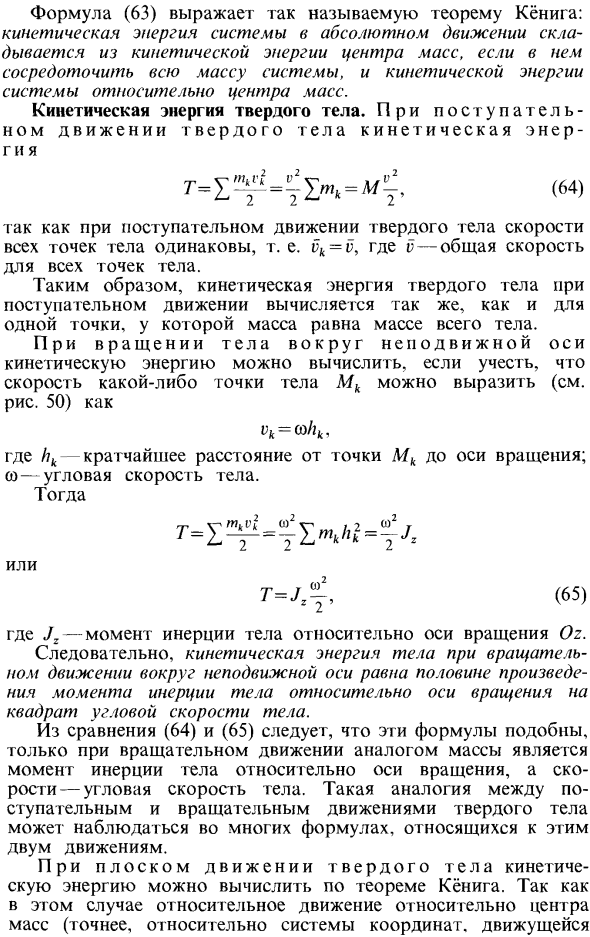
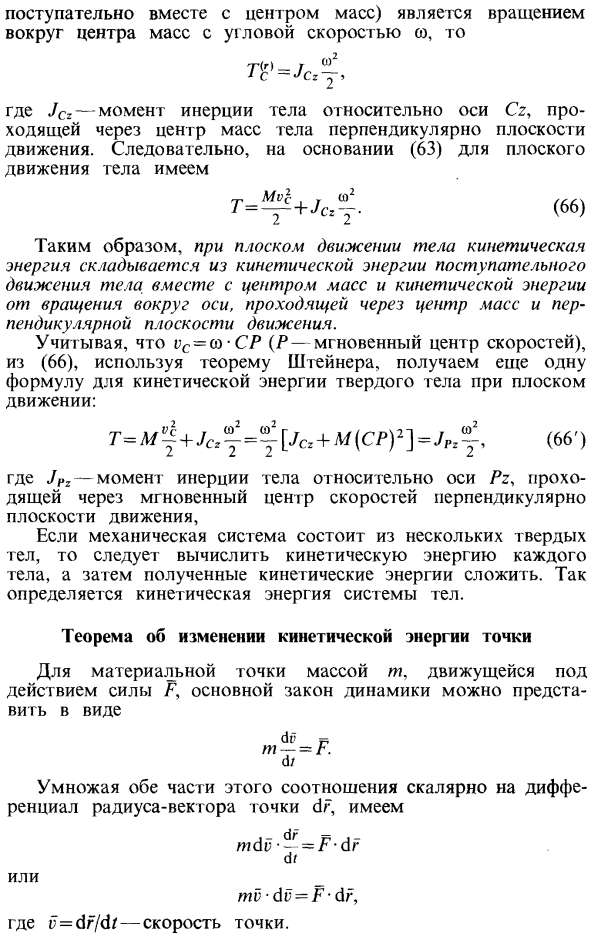
Учитывая, что mk = M — масса системы, второе слагаемое в (62) (63) где Сумма Г? 1 — кинетическая энергия относительного движения системы относительно системы координат, которая постепенно движется вместе с центром тяжести, или кинетическая энергия системы относительно центра тяжести. Уравнение (63) представляет собой так называемую теорему Кенига: кинетическая энергия системы абсолютного движения — это кинетическая энергия центра масс, когда вся масса системы сконцентрирована в нем, и Общая кинетическая энергия. Твердая кинетическая энергия. Поступательное движение твердой кинетической энергии (S), Во время перемещения твердого тела v — общая скорость всех точек тела, поскольку скорость всех точек тела одинакова, то есть vk = v.
Таким образом, кинетическая энергия перемещаемого твердого тела рассчитывается так же, как и одна точка, масса которой равна массе всего тела. Когда тело вращается вокруг фиксированной оси, кинетическая энергия может быть рассчитана с учетом того, что скорость точки на теле Mk может быть выражена следующим образом (см. Рисунок 50). vk = cahk. Где hk — кратчайшее расстояние от точки Mk до оси вращения. И — угловая скорость тела. тогда м == у ^ = ^ у ж 2 2 ’* 2 или (65) где Jz — момент инерции тела относительно оси вращения Oz. Таким образом, кинетическая энергия объекта при вращательном движении вокруг неподвижной оси равна половине произведения момента инерции объекта относительно оси вращения, обусловленного квадратом угловой скорости объекта.
Из сравнения (64) и (65) видно, что эгида формулы аналогична. Только для вращательного движения, аналог массы — это момент инерции тела относительно оси вращения, а скорость — угловая скорость тела. Это сходство между поступательным и вращательным движением твердого тела можно наблюдать во многих формулах, связанных с этими двумя движениями. Для твердого плоского движения кинетическая энергия может быть рассчитана по теореме Кенига. В этом случае относительное движение к центру тяжести (точнее, относительное движение к движущейся системе координат (С поступательным центром тяжести) вращается вокруг центра тяжести с угловой скоростью ω.
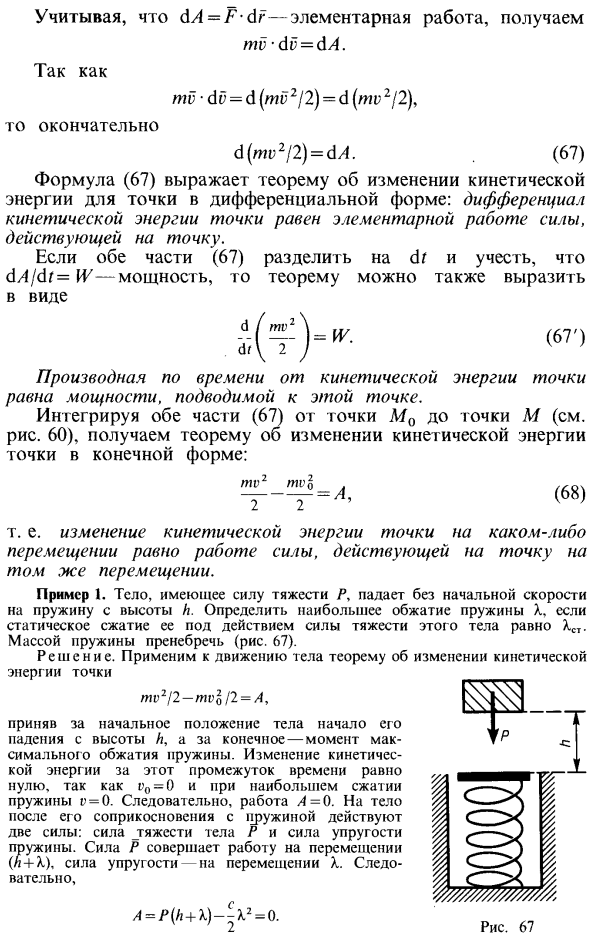
Где JCz — момент инерции объекта вокруг оси Cz, который проходит через центр масс объекта, перпендикулярный плоскости движения. Поэтому, исходя из (63), о плоском движении тела + (66) Таким образом, в плоском движении тела кинетическая энергия представляет собой сумму кинетической энергии и центра масс поступательного движения тела и кинетической энергии от вращения вокруг оси, проходящей через центр масс и перпендикулярной плоскости движения. Учитывая vc = wCP (P — центр мгновенной скорости), мы используем теорему Штейнера из (66), чтобы получить другое уравнение для кинетической энергии твердого тела в плоском движении. r = m2 + L-.4- «’ p di; = Fdf, Где v = dr / dt — скорость точки. di5 = d ^. с того времени mv • d6 = d (mv 2/2) = d (mv2 / 2) и, наконец, d (mv2l2) = дА. (67) Уравнение (67) выражает теорему об изменении кинетической энергии точки в дифференциальной форме.
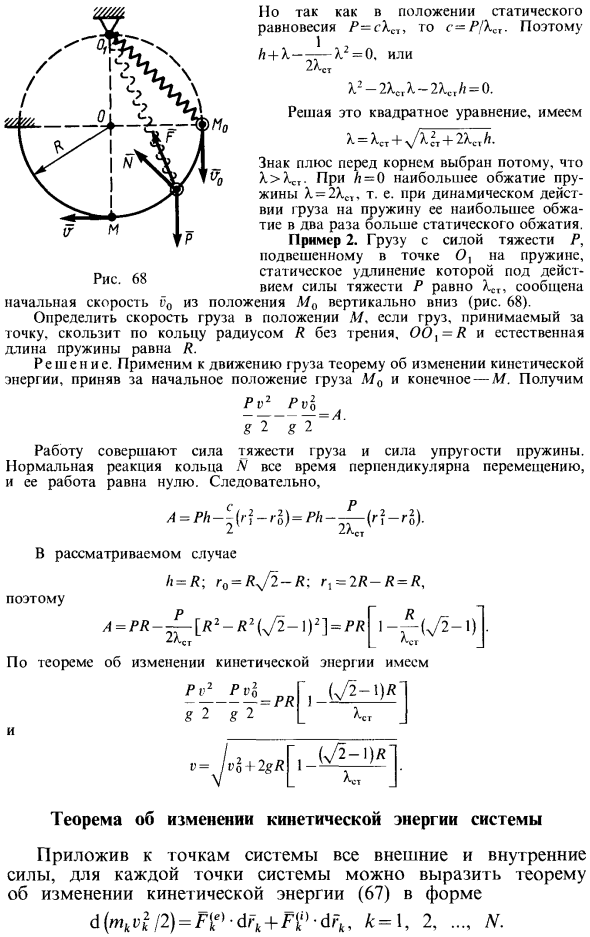
- Производная кинетической энергии точки равна основной работе силы, действующей на точку. Разделив обе части (67) на dt и считая степень dA / dl = W, теорема также может быть выражена как: Производная по времени кинетической энергии точки равна мощности, подаваемой в эту точку. Интегрируя обе стороны от точки Мо к точке М в (67) (см. Рис. 60), получим теорему об изменении кинетической энергии точки в окончательном виде. = (68) То есть изменение кинетической энергии точки при любом смещении равно работе силы, действующей на точку при одном и том же смещении. Но из-за положения статического равновесия / ′ = XC1, знак плюс перед маршрутом выбран. Если A = 0, используется максимальное сжатие. е. В динамическом действии -> ужин самый большой кризис — статический процесс сжатия. Пример 2. Нагрузка силы тяжести P подвешена в точке O на пружине со статическим удлинением, равным X, под действием силы тяжести P. __ г _ в положении Мо сообщается вертикально вниз (рис. 68). Если нагрузка принимается за точку и скользит по кольцу радиуса R без трения, она определяет скорость нагрузки в положении М. 00, = R, а естественная длина пружины — R. Решения. Примените теорему об изменении кинетической энергии к движению груза, где Mo — начальное положение груза, а M — конечное положение.
В настоящей работе выведено правило сохранения момента движения системы и рассмотрена материальная точка как механическая система, в которой число точек равно единице. Людмила Фирмаль
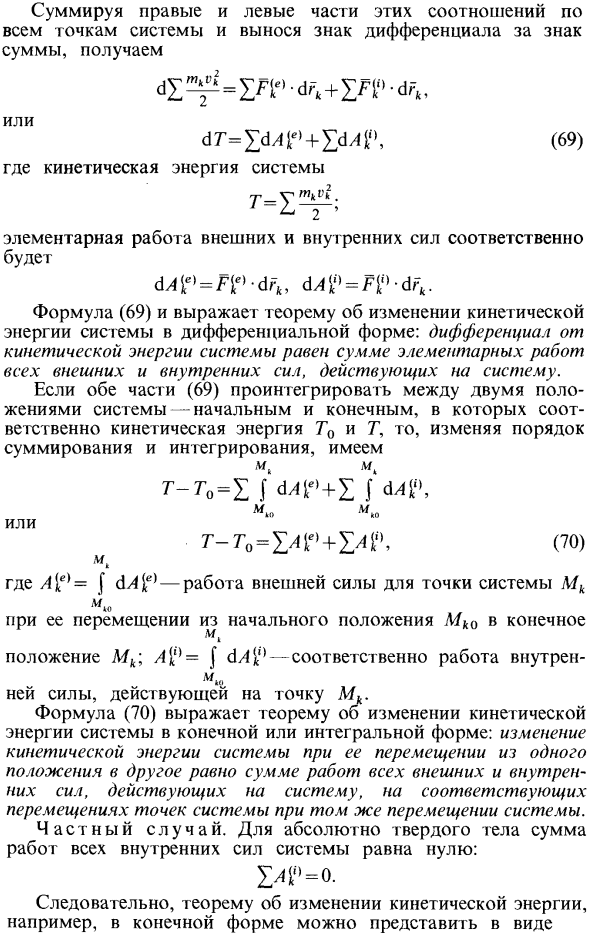
Обеспечивает идеальную упругость пружины. Нормальное время реакции перпендикулярно смещению. Ее работа равна нулю. так Но теорема Теорема об изменении кинетической энергии системы Приложите все внешние и внутренние силы к системным точкам, и для каждой точки в системе теорема об изменении кинетической энергии (67) -drk, dA? = Fpdrk. Уравнение (69) выражает теорему об изменении кинетической энергии системы в дифференциальной форме.
Производная кинетической энергии системы равна сумме основной работы всех внешних и внутренних сил, действующих на систему. Объединение обеих сторон (69) в двух положениях системы (первая и последняя, кинетическая энергия To и T соответственно) меняет порядок суммирования и интегрирования. Т-То = ^ ( + £ (дАи \ или T-T0 = £ aG + £ a? , (70) Здесь f d / 4le) — действие внешней силы на точку системы Mk, когда система Mk перемещается из начальной позиции Mk0 в конечную позицию Mk. / IV = f d ^ V — каждая внутренняя сила, действующая на точку Mk. Уравнение (70) выражает теорему об изменении кинетической энергии системы в конечной или интегральной форме.
Изменение кинетической энергии системы при перемещении из одного положения в другое равно сумме работы всех внешних и внутренних сил, действующих на систему при соответствующем смещении системной точки в том же положении. Особый случай. Для абсолютно твердых тел суммарная работа всех внутренних сил в системе равна нулю: Meaux Таким образом, теорема об изменении кинетической энергии может быть выражена, например, в окончательном виде: T-T0 = 2A [´ ‘. (71) Изменение кинетической энергии твердого тела при любом смещении равно сумме работы всех внешних сил, действующих на объект при соответствующем смещении точки объекта при одинаковом смещении твердого тела.
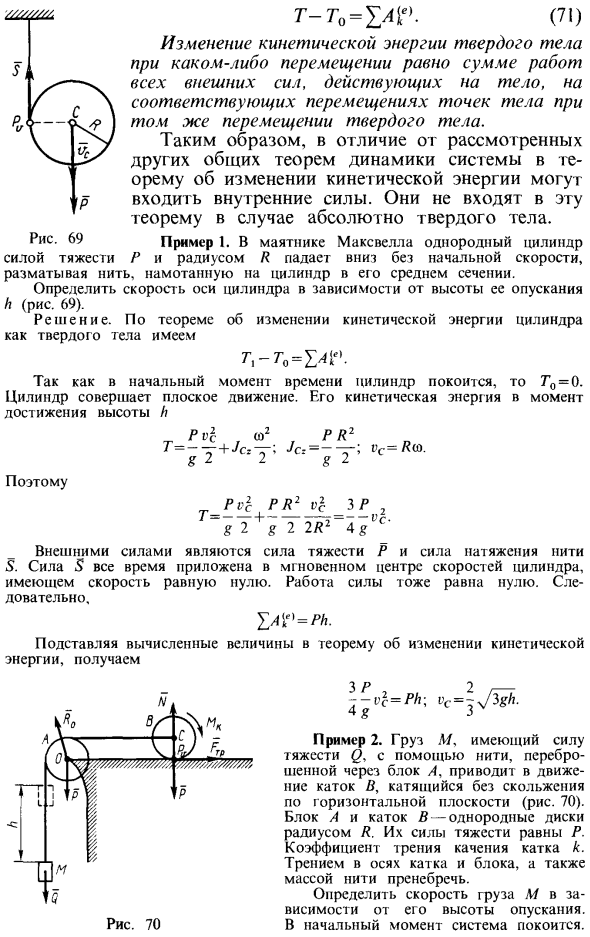
Таким образом, в отличие от других общих теорем системной динамики, внутренние силы могут ввести теорему об изменении кинетической энергии. Абсолютно твердые тела не включены в эту теорему. Пример I. В маятнике Максвелла однородный цилиндр радиуса R падает без начальной скорости и наматывается вокруг центра цилиндра. В зависимости от высоты спуска определяется скорость оси цилиндра (рис. 69). Решения. Согласно теореме об изменении кинетической энергии системы, состоящей из нагрузки, резьбы, блока и катка Здесь T0 = 0.
Потому что сначала была система. Укажите Г. Нагрузка T2 и T3 кинетическая энергия, блок за падением соответственно При загрузке до высоты L, так но — (2e + sp + P) = — (e + 2 />). Поскольку внутренняя работа натяжения нити равна нулю, вся сплошная система, соединенная нитью, обычно составляет £ 1 ° = 0. Поскольку эти силы приложены к неподвижной точке O, сила тяжести устройства и реакция osn P работают равными нулю.
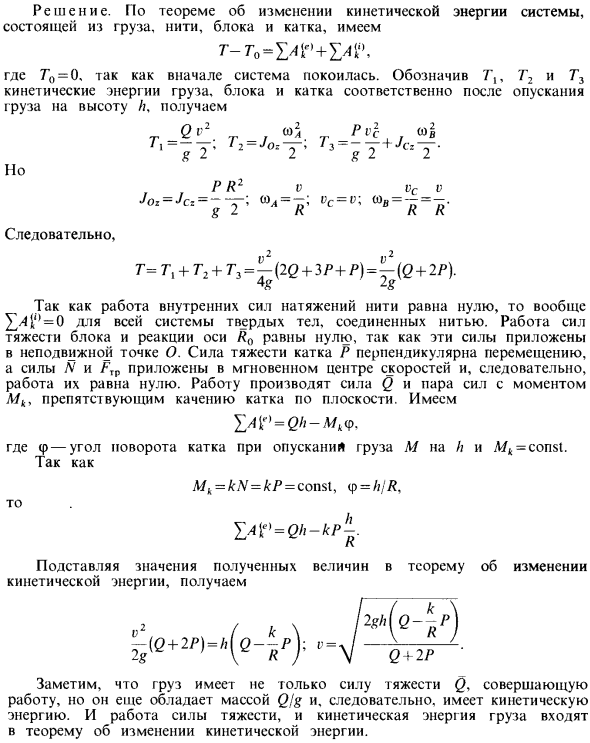
Поскольку сила тяжести ролика P перпендикулярна смещению, а силы N, F и p приложены к мгновенному центру скорости, работа равна нулю. Работа выполняется парой сил с силой Q и моментом Mk, препятствующих вращению ролика вдоль плоскости. У нас есть £ L1 ‘’- (> L-L4


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Техническая механика
Динамика системы материальных точек
Уравнение поступательного движения твердого тела
Механической системой материальных точек называется совокупность материальных точек, каким-то образом связанных межу собой.
Всякое твердое тело можно считать неизменяемой механической системой материальных точек. Силы взаимодействия точке данной системы называются внутренними силами; силы, с которыми действуют на данную систему другие точки, не входящие в эту систему, — внешними.
Пусть твердое тело массой m движется под действием силы F поступательно с ускорением а (рис. 1) .

Разобьем тело на ряд материальных точек с массами m1 и применим принцип Даламбера, не забывая при этом, что внутренние силы в уравнение равновесия не входят, так как на основании третьего закона Ньютона их сумма для системы в целом равна нулю.
В каждой материальной точке приложим силу инерции Fi ин = — mia и составим уравнение равновесия:
ΣX = 0 ; F – ΣFi ин = 0 ,
Так как при поступательном движении все точки тела имеют одинаковые ускорения, то а можно вынести за знак суммы, т. е.
Согласно второму закону Ньютона векторы силы F и ускорения а совпадают по направлению, поэтому можно записать:
Это и есть уравнение поступательного движения твердого тела. Очевидно, что это уравнение ничем не отличается от основного уравнения динамики точки, следовательно, все формулы динамики точки применимы для тела, движущегося поступательно.
Уравнение вращательного движения твердого тела
Пусть твердое тело под действием системы сил вращается вокруг неподвижной оси z с угловым ускорением α (рис. 2) .

Разобьем тело на ряд материальных точек с массами mi и применим, как и в предыдущем случае, принцип Даламбера (Д’Аламбера).
К каждой материальной точке приложены касательная и нормальная силы инерции. Составим уравнение равновесия:
Моменты реакций подшипника и подпятника, а также сил Fτi ин относительно оси z равны нулю, так как линии действия этих сил пересекают ось; сумма моментов внешних сил относительно оси вращения называется вращающим моментом .
Тогда
Выражение Σ(miri 2 ) называют моментом инерции тела относительно оси и обозначают J :
Момент инерции тела относительно оси есть сумма произведений масс материальных точек, составляющих это тело, на квадрат расстояния от них до этой оси.
В результате получим формулу:
которая называется уравнением вращательного движения твердого тела. В этой формуле J – момент инерции тела относительно оси вращения.
Единица момента инерции — [J] = [mr 2 ] = [m][r 2 ] = кг×м 2 .
Момент инерции играет во вращательном движении такую же роль, какую масса играет в поступательном движении, т. е. момент инерции есть мера инертности вращающегося тела.
В качестве примера определим момент инерции тонкого однородного сплошного диска, радиус которого R , толщина s , масса m , относительно оси, перпендикулярной плоскости диска и проходящей через его центр О (см. рис 3) .

Разобьем диск на элементарные кольца переменного радиуса r , шириной dr и толщиной s . Согласно определению момент инерции такого кольца равен
dJ = dΣ(mir 2 ) = r 2 dΣmi = r 2 dm = r 2 2πr drsρ = 2πsρ r 3 dr ,
где ρ – плотность материала диска.
Просуммировав моменты инерции всех элементарных колец, получим момент инерции всего диска:
J = ∫ 2πsρ r 3 dr = 2πsρ ∫ r 3 dr = 2πsρ r 4 /4 = πsρ r 4 /2 .
Так как масса диска m = πr 2 sρ , то можно записать: J = mR 2 /2 .
Нетрудно понять, что момент инерции однородного сплошного прямоугольного кругового цилиндра радиусом R и массой m любой высоты определяют по такой же формуле. Чтобы убедиться в этом, достаточно мысленно разбить цилиндр плоскостями, параллельными основанию на тонкие диски, и просуммировать моменты инерции всех дисков.
Моменты инерции тел вращения
На основе теоретических выкладок, изложенных выше, мы установили, что момент инерции круглого диска и цилиндрического тела можно определить по формуле
Аналогичные формулы можно вывести для определения моментов инерции других геометрических тел, наиболее часто встречающихся при расчетах и решении задач технической механики.
Моменты инерции для некоторых других однородных тел можно определить по формулам, которые приводятся здесь без вывода.
Шар массой m , радиусом R относительно диаметра:
Тонкий стержень массой m , длиной l относительно оси, проходящей перпендикулярно стержню через его конец:
Тонкая сферическая оболочка массой m , радиусом R относительно диаметра:
Пустотелый вал массой m , наружным радиусом R и радиусом отверстия r относительно оси:
Момент инерции Jz тела относительно какой-либо оси z , параллельной центральной (т. е. проходящей через центр тяжести С тела), равен сумме центрального момента инерции Jc и произведения массы m тела на квадрат расстояния а между этими осями:
Из этой формулы (ее вывод здесь не приводится) следует, что из всех моментов инерции тела относительно параллельных осей наименьшим будет момент инерции относительно центральной оси , т. е. центральный момент инерции.
Иногда момент инерции определяют по формуле: J = mrи 2 , где rи – радиус инерции тела :
Физический смысл радиуса инерции следующий: если массу тела сосредоточить в одной точке (такая масса называется приведенной) и поместить ее от оси вращения на расстоянии, равном радиусу инерции, то момент инерции приведенной массы будет равен моменту инерции данного тела относительно той же оси.
Удвоенный радиус инерции тела называется диаметром инерции : Dи = 2rи .
В практике иногда вместо момента инерции пользуются понятием махового момента GDи 2 .
Маховым моментом называется произведение силы тяжести G вращающегося тела на квадрат его диаметра инерции.
Единица махового момента — Н×м 2 .
Между маховым моментом и моментом инерции существует простая зависимость:
GDи 2 = 4g J = 39,24 J .
Кинетическая энергия твердого тела
Кинетическая энергия твердого тела равна сумме кинетических энергий материальных точек, составляющих данное тело:
Определим выражения для кинетической энергии твердого тела для трех случаев движения.
Тело движется поступательно
Учитывая, что при поступательном движении тела все его точки имеют одинаковую траекторию и одинаковые скорости, можно записать:
Следовательно, при поступательном движении твердого тела его кинетическая энергия вычисляется по той же формуле, что и кинетическая энергия материальной точки.
Тело вращается вокруг неподвижной оси
Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
Тело движется плоскопараллельно
Как известно из кинематики, сложное плоскопараллельное движение твердого тела в каждый данный момент времени можно считать простейшим вращательным движением вокруг мгновенной оси (метод мгновенных центров скоростей) .
 Допустим, что известна скорость vс центра тяжести тела, тогда мгновенная угловая скорость
Допустим, что известна скорость vс центра тяжести тела, тогда мгновенная угловая скорость
где ОС – расстояние центра тяжести С тела от мгновенной оси вращения О .
Момент инерции Jо относительно мгновенной оси вращения определяют по формуле:
где Jс — момент инерции относительно центральной оси или центральный момент инерции.
Кинетическую энергию тела, движущегося плоскопараллельно, определяют следующим образом:
Кпп = Jоω 2 /2 = (Jс + mОС 2 ) ω 2 /2 = (Jсω 2 )/2 + mOC 2 /2×vс 2 /ОС 2 ,
Кинетическая энергия твердого тела, движущегося плоскопараллельно, равна сумме кинетических энергий в поступательном движении вместе с центром тяжести и вращательном движении вокруг центральной оси, перпендикулярной основной плоскости.
В заключение сформулируем теорему об изменении кинетической энергии системы тел:
Изменение кинетической энергии системы тел при некотором перемещении равно алгебраической сумме работ всех внешних (активных и реактивных) и внутренних сил, действовавших на систему при указанном перемещении:
Кинетическая энергия системы тел равна сумме кинетических энергий каждого тела в отдельности.
Если тело твердое, то сумма работ его внутренних сил равна нулю. При некоторых связях, называемых идеальными, работа реактивных сил тоже будет равна нулю.
http://lfirmal.com/kineticheskaya-ehnergiya/
http://k-a-t.ru/tex_mex/22-dinamika_7/index.shtml