Обыкновенные дифференциальные уравнения
Содержание:
Обыкновенные дифференциальные уравнения
При решении многих задач математики, техники, экономики и других отраслей науки бывает трудно установить закон, связывающий искомые и известные переменные величины. Но удается установить связь между производными или дифференциалами этих переменных, которая выражается уравнениями или системами уравнений. Такие уравнения называют дифференциальными уравнениями. Термин «дифференциальное уравнение» введен в 1676 году В. Лейбницом.
Мы рассмотрим только уравнения с функциями одной переменной и обычными производными, которые называют обычными дифференциальными уравнениями.
Основные понятия о дифференциальных уравнениях
Определение. Дифференциальным уравнением называется уравнение, которое связывает независимую переменную x, искомую функцию y = f (x) и еепроизводные или дифференциалы разных порядков, то есть уравнение
 (7.1)
(7.1)
Важно понять, что искомая функция в дифференциальном уравнении входит под знак дифференциала или под знак производной.
Определение. Порядком дифференциального уравнения называется наивысший порядок производной от неизвестной функции, входящей в дифференциальное уравнение.
Так, уравнение y’ – 2 xy 2 + 5 = 0 является дифференциальным уравнением первого порядка, а уравнения y» + 2 y’ – y – sin x = 0 — дифференциальным уравнением второго порядка.
Определение. Решением дифференциального уравнения (7.1) называется такая функция y = φ (x), которая при подстановке в уравнение (7.1) превращает его в тождество.
Например, для дифференциального уравнения
y’- 2 x = 0 (7.2)
решением является функция y = x 2 . Найдем производную y’= 2x и подставим в уравнение, получим: 2x – 2x = 0, 0 ≡ 0.
Следует заметить, что y = x 2 не единственное решение уравнения. Это уравнение имеет бесконечное множество решений, которые можно записать так: y = x 2 + C.
Дифференциальные уравнения первого порядка
Определение. Дифференциальным уравнением первого порядка называется уравнение, которое связывает независимую переменную x, искомую функцию y = f (x) и ее первую производную:
F (x, y, y’) = 0. (7.3)
Поскольку производную можно записать в виде отношения дифференциалов, то в уравнение производная может не входить, а будут входить дифференциалы неизвестной функции и независимой переменной.
Если уравнение (7.2) решить относительно у’, то оно будет иметь вид:
y’= f (x, y) или  . (7.4)
. (7.4)
Простые примеры показывают, что дифференциальное уравнение может иметь бесконечное множество решений. Это мы видим на примере уравнения (7.2). Легко убедиться также, что дифференциальное уравнение  имеет решениями функции y = Cx, а дифференциальное уравнение
имеет решениями функции y = Cx, а дифференциальное уравнение  — функции
— функции  где C — произвольное число.
где C — произвольное число.
Как видим, в решение указанных дифференциальных уравнений входит произвольное число C. Предоставляя постоянной C различные значения, будем получать различные решения дифференциального уравнения.
Определение. Общим решением дифференциального уравнения (7.3) называется функция
у = φ (х, С), (7.5)
которая зависит от одной произвольной постоянной и удовлетворяет дифференциальное уравнение при произвольном значении C.
Если функция (7.5) выражается неявно, то есть в виде
Ф (х, у, С) = 0, (7.6)
то (7.6) называется общим интегралом дифференциального уравнения.
Определение. Частным решением дифференциального уравнения (7.3) называется такое решение, которое получается из общего решения (7.5) при некотором конкретном значении постоянной C.
Ф (х, у, С0) называется частным интегралом дифференциального уравнения.
На практике при решении конкретных задач часто приходится находить не все решения, а решение, которое удовлетворяет определенным начальным условиям. Одной из таких задач является задача Коши, которая для дифференциального уравнения первого порядка формулируется так: среди всех решений дифференциального уравнения (7.3) найти такое решение y, которое при заданном значении независимой переменной x = x0 равна заданному значению y0 , то есть y (x0) = y0 или  (7.7)
(7.7)
Условие (7.7) называется начальным условием решения.
Покажем на примере, как найти частное решение дифференциального уравнения, когда известно общее решение и задано начальное условие.
Мы видим, что дифференциальное уравнение  имеет общее решение y = Cx. Зададим начальное условие
имеет общее решение y = Cx. Зададим начальное условие  . Подставим эти значения в общее решение, получим 6 = 2С, откуда С = 3. Следовательно, функция y = 3x удовлетворяет и дифференциальное уравнение, и начальное условие.
. Подставим эти значения в общее решение, получим 6 = 2С, откуда С = 3. Следовательно, функция y = 3x удовлетворяет и дифференциальное уравнение, и начальное условие.
Ответ на вопрос о том, при каких условиях уравнение (7.4) имеет
решение, дает теорема Коши.
ТЕОРЕМА (о существовании и единственности решения). Если функция f (x, y) и ее частная производная  определены и непрерывные в области G, которая содержит точку M0 (x0; y0) , то существует единственное решение y = φ (x) уравнения (7.4), которое удовлетворяет начальному условию: y (x0) = y0.
определены и непрерывные в области G, которая содержит точку M0 (x0; y0) , то существует единственное решение y = φ (x) уравнения (7.4), которое удовлетворяет начальному условию: y (x0) = y0.
Теорема Коши дает достаточные условия существования единого решения дифференциального уравнения (7.4). Заметим, что в условии теоремы не требуется существования частной производной  .
.
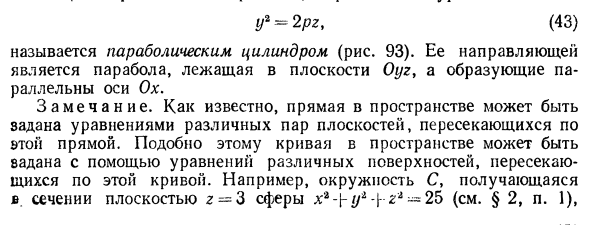
График произвольного частного решения дифференциального уравнения называется интегральной кривой. Общему решению отвечает семья кривых. Так мы проверили, что уравнение  имеет общее решение y = Cx, то ему соответствует семья прямых,
имеет общее решение y = Cx, то ему соответствует семья прямых,
которые проходят через начало координат (рис. 1).
Уравнение  имеет общее решение, ему соответствует семья равносторонних гипербол (рис. 2).
имеет общее решение, ему соответствует семья равносторонних гипербол (рис. 2). 
Если задано начальное условие  то это означает, что задана точка M0 (x0;y0), через которую должна проходить интегральная кривая, отвечающая искомому частному решению. Таким образом, отыскание частного решения дифференциального уравнения по заданному начальному условию геометрически означает, что из семьи
то это означает, что задана точка M0 (x0;y0), через которую должна проходить интегральная кривая, отвечающая искомому частному решению. Таким образом, отыскание частного решения дифференциального уравнения по заданному начальному условию геометрически означает, что из семьи
интегральных кривых мы выбираем проходящую через точку M0 (x0; y0).
Надо заметить, что нахождение решения дифференциального уравнения часто называют интегрированием уравнения. При этом операцию интегрирования функций называют квадратурой.
Общего метода решения дифференциальных уравнений первого порядка не существует. Рассмотрим некоторые методы решения отдельных типов дифференциальных уравнений.
Дифференциальные уравнения с разделенными переменными
Определение. Уравнение вида
f1 (y) dy = f2 (x) dx, (7.8)
где f1 (y) и f2 (x) — заданные функции, называется дифференциальным уравнением с разделенными переменными.
В этом уравнении каждая из переменных находится только в той части уравнения, где находится ее дифференциал. Уравнение dy = f (x) dx является частным случаем уравнения (7.8). Чтобы решить уравнение (7.8), надо проинтегрировать обе его части:  .
.
Понятно, что произвольную постоянную С можно записывать в любой части равенства.
Пример 1. Решить дифференциальное уравнение:  , удовлетворяющее начальному условию
, удовлетворяющее начальному условию 
Решение. Проинтегрируем левую и правую части уравнения, причем для удобства потенцирования, произвольную постоянную запишем в виде ln |C| получим: 

 — это общее решение дифференциального уравнения.
— это общее решение дифференциального уравнения.
Подставляя в общее решение начальное условие, найдем С: 2 = С.
Итак,
 является частным решением данного уравнения.
является частным решением данного уравнения.
Дифференциальные уравнения с разделяющимися переменными
Определение. Уравнение вида
f1 (x) f2 (y) + g1 (x) g2 (y) = 0 (7.9)
называется дифференциальным уравнением с разделяющимися переменными.
В этом уравнении переменные еще не разделены, но, поделив обе части уравнения на произведение f2 (y) g1 (x), получим уравнение с разделенными переменными: 
Интегрируя это уравнение, запишем  .
.
Получили общий интеграл данного уравнения.
Пример 2. Решить дифференциальное уравнение
x (y + 1) dx – (x 2 + 1) ydy = 0.
Решение. Поделим обе части этого уравнения на (y + 1) (x 2 + 1), после чего получим  .
.
Интегрируя, получим



 — общий интеграл дифференциального уравнения.
— общий интеграл дифференциального уравнения.
Пример 3. Найти частное решение дифференциального уравнения (1 + x 2 ) dy + ydx = 0, удовлетворяющее начальному условию y (0) = 1.
Решение. Отделим переменные, поделив уравнение на y ⋅ (1 + x 2 ), и проинтегрируем данное уравнение: 
Получили общий интеграл дифференциального уравнения.
Используя начальное условие, найдем произвольную постоянную С:
ln 1 + arctg 0 = C, откуда C = 0.
Найденную постоянную подставим в общий интеграл и отыщем частное решение:
 откуда
откуда 
Однородные дифференциальные уравнения
Определение. Функция двух переменных f (x, y) называется однородной n- го измерения, если выполняется условие 
Например, f (x, y) = x 2 + y 2 , f (tx, ty) = t 2 f (x 2 + y 2 ) — однородная функция второго измерения.
Определение. Дифференциальное уравнение
y ‘= f (x, y) (7.10)
называется однородным, если функция f (x, y) однородная нулевого измерения.
Покажем, что это уравнение можно свести к уравнению с разделенными переменными.
Рассмотрим функцию f (tx, ty). Сделаем замену  будем иметь:
будем иметь: 
Тогда уравнение (7.10) запишется в виде  (7.11)
(7.11)
В общем случае переменные в однородном уравнение не разделяются сразу. Но, если ввести вспомогательную неизвестную функцию u = u (x) по формуле
 или y = xu, (7.12)
или y = xu, (7.12)
то мы сможем превратить однородное уравнение в уравнение с разделенными переменными.
Из формулы (7.12) найдем y’ = u + xu’ и уравнение  примет вид: u + xu’ = φ (u),
примет вид: u + xu’ = φ (u),
то есть  , откуда
, откуда  .
.
После интегрирования получим 
Отсюда находим выражение для функции u, возвращаемся к переменной y = xu и получим решение однородного уравнения.
Чаще всего не удается найти функцию u явно выраженной, тогда, после интегрирования, в левую часть следует подставить  вместо u.
вместо u.
В результате получим решение уравнения в неявном виде.
Пример 1. Найти решение однородного уравнения

Решение. Заменой y = xu сведем заданное уравнение к уравнению
 или
или  .
.
Отделяя переменные, найдем
 откуда
откуда  или
или  , то есть
, то есть  .
.
Возвращаясь к переменной y, получим общее решение:  .
.
Линейные дифференциальные уравнения
Определение. Линейным дифференциальным уравнением первого порядка называется уравнение, которое содержит искомую функцию и ее производную в первой степени без их произведения:
y’ + P (x) y = Q (x). (7.13)
Здесь P (x), Q (x) — известные функции независимой переменной x. Например, y’ + 2 xy = x 2 .
Если Q (x) = 0, то уравнение (7.13) называется линейным однородным и является уравнением с разделяющимися переменными.
Если Q (x) ≠ 0, то уравнение (7.13) называется линейным неоднородным, которое можно решить несколькими способами.
Рассмотрим метод Бернулли, с помощью которого уравнение (7.13) можно свести к интегрированию двух дифференциальных уравнений первого порядка с разделяющимися переменными.
Решение дифференциального уравнения (7.13) ищем в виде y = u (x) v (x) или y = uv, (7.14)
где u (x), v (x) — неизвестные функции. Одну из этих функций можно взять произвольную, а другая определяется из уравнения (7.13).
Из равенства y = uv найдем производную y’:
y’= u’ ⋅ v + u⋅ v’.
Подставим y и y’ в уравнение (7.13):
u’v + uv’ + P (x) ⋅ u⋅ v = Q (x) или u’v + u (v’ + P (x) ⋅ v) = Q (x).
Выберем функцию v такой, чтобы v’ + P (x) v = 0. (7.15)
Тогда для отыскания функции u получим уравнение:
u’v = Q (x). (7.16)
Сначала найдем v из уравнения (7.15).
Отделяя переменные, имеем  , откуда
, откуда 
Под неопределенным интегралом здесь будем понимать какую-то одну первообразную от функции P (x), то есть v будет определенной функцией от x.
Зная v, находим u из уравнения (7.16): 
откуда 
Здесь мы уже берем для u все первообразные.
Найденные функции u и v подставляем в (7.14) и получаем общее решение линейного дифференциального уравнения:
 (7.17)
(7.17)
При решении конкретных примеров проще выполнять эти выкладки, чем применять громоздкую формулу (7.17).
Пример 1. Решить дифференциальное уравнение  .
.
Решение. Решение ищем в виде y = uv, тогда y’= u’ ⋅ v + u⋅ v’.
Подставим y и y’ в уравнение:  или
или  . (7.18)
. (7.18)
Выражение, стоящее в скобках, приравниваем к нулю, имеем
 или
или 
Отделим переменные, домножив обе части уравнения на  , тогда
, тогда  .
.
После интегрирования, получим ln |v| = ln |x| (здесь ограничимся одной первообразной), откуда v = x.
Подставим v = x в уравнение (7.18): 
Общее решение запишется:
y = x (x + C) = x 2 + Cx.
Пример 2. Найти частное решение дифференциального уравнения  который удовлетворяет начальному условию y (0) = 0.
который удовлетворяет начальному условию y (0) = 0.
Решение. Заданное уравнение — это линейное неоднородное уравнение первого порядка, решение которого ищем в виде y = u⋅v.
Тогда 

Подставим v в уравнение и найдем u: 
Общее решение дифференциального уравнения будет: 
Подставляем начальные условия в найденное решение и находим С: 
Из общего решения получаем частное решение  .
.
Дифференциальное уравнение Бернулли
Определение. Уравнения вида
 (или
(или  )
)
называется дифференциальным уравнением Бернулли.
Данное уравнение отличается от уравнения (7.13) только множителем y» (или x») в правой части. Для того, чтобы права часть данного уравнения была такой, как в (7.13), разделим его левую и праву часть на y»: 
Сделаем замену: 

Домножим левую и правую части полученного уравнения на (n + 1) и, используя замену, получим: 

Мы получили линейное дифференциальное уравнение относительно новой переменной 
Пример 1. Найти общее решение дифференциального уравнения xy’ + y = y 2 ln x.
Решение.  .
.
Сделаем замену  Тогда
Тогда 

Данное уравнение решим, сделав замену z = u (x) ⋅ v (x). 
Выбираем функцию v (x) так, чтобы выражение в скобках равнялось нулю, и эта функция была бы частным решением уравнения 
Тогда  .
.
Проинтегрировав правую часть этого уравнения по частям, получим  , а при y -1 = z = uv, имеем
, а при y -1 = z = uv, имеем 
Обыновенное дефференциальное уравнение
Обыкновенным дифференциальным уравнением называется любое соотношение, связывающее независимую переменную  искомую функцию
искомую функцию  и производные искомой функции
и производные искомой функции  до некоторого порядка включительно.
до некоторого порядка включительно.
Обыкновенное дифференциальное уравнение может быть приведено к виду

Здесь  — известная функция, заданная в некоторой области
— известная функция, заданная в некоторой области 
Число  т. е. наивысший из порядков производных, входящих в (1), называется порядком уравнения.
т. е. наивысший из порядков производных, входящих в (1), называется порядком уравнения.
Обыкновенные дифференциальные уравнения первого порядка, разрешенные относительно производной. уравнения, интегрируемые в квадратурах
По этой ссылке вы найдёте полный курс лекций по высшей математике:
Основные понятия и определения
Понятие об уравнении первого порядка, разрешенном относительно производной. В соответствии со сказанным во введении, уравнение первого порядка имеет вид

В этой главе мы будем рассматривать уравнение, разрешенное относительно производной:

Наряду с этим уравнением мы всегда будем рассматривать перевернутое уравнение

используя последнее в окрестности тех точек, в которых  обращается в бесконечность.
обращается в бесконечность.
Во многих случаях оказывается целесообразным «место уравнении (2) и (2′) рассматривать одно равносильное им дифференциальное уравнение

Обе переменные  и
и  входят в это уравнение уже равноправно, и любую из них мы можем принять за независимую переменную.
входят в это уравнение уже равноправно, и любую из них мы можем принять за независимую переменную.
Умножая обе части уравнения (3) на некоторую функцию  получаем более симметричное уравнение:
получаем более симметричное уравнение:

где  Обратно, всякое уравнение вида (4) можно переписать в виде уравнений (2) или (2′), разрешая его относительно
Обратно, всякое уравнение вида (4) можно переписать в виде уравнений (2) или (2′), разрешая его относительно  или
или  так что уравнение (4) равносильно следующим двум уравнениям:
так что уравнение (4) равносильно следующим двум уравнениям:

Иногда уравнение записывают *з так называемой симметрической форме:

Возможно вам будут полезны данные страницы:
Решение уравнения. Предположим, что правая часть уравнения (2),  определена на некотором подмножестве
определена на некотором подмножестве  вещественной плоскости
вещественной плоскости  Функцию
Функцию  определенную в интервале
определенную в интервале  мы будем называть решением уравнения (2) в этом интервале*, если:
мы будем называть решением уравнения (2) в этом интервале*, если:
- Существует производная
 для всех значений из интервала (Отсюда следует, что решение представляет собою функцию, непрерывную ею всей области определения).
для всех значений из интервала (Отсюда следует, что решение представляет собою функцию, непрерывную ею всей области определения). - Функция обращает уравнение (2) в тождество:
 для всех значений
для всех значений  из интервала
из интервала  (Отсюда следует, что решение
(Отсюда следует, что решение  представляет собою функцию, непрерывную ею всей области определения).
представляет собою функцию, непрерывную ею всей области определения). обращает уравнение (2) в тождество:
обращает уравнение (2) в тождество: 
справедливое для всех значений  из интервала
из интервала  Это означает, что при любом
Это означает, что при любом  из интервала
из интервала  точка
точка  принадлежит множеству
принадлежит множеству  и
и 
Так как наряду с уравнением (2) рассматривается перевернутое уравнение (2′), то и решения  этого перевернутого уравнения естественно присоединять к решениям уравнения (2).
этого перевернутого уравнения естественно присоединять к решениям уравнения (2).
В этом смысле в дальнейшем мы будем для краткости называть решения уравнения (2′) решениями уравнения (2).
Примеры с решением
Пример 1.

является решением уравнения

в интервале  ибо она определена и дифференцируема в эгои интервале, и, подставляя се в уравнение (9), получаем тождество:
ибо она определена и дифференцируема в эгои интервале, и, подставляя се в уравнение (9), получаем тождество:

справедливое при всех значениях 
Пример 2.
Функция  есть решение равнения
есть решение равнения  в интервале
в интервале 
Пример 3.

является решением уравнения 
в интервале 
Иногда функцию  обращающую уравнение (2) в тождество (7), т. е. решение уравнения (2), называют интегралом этого уравнения. Мы будем употреблять термин интеграл только в смысле п. 16.
обращающую уравнение (2) в тождество (7), т. е. решение уравнения (2), называют интегралом этого уравнения. Мы будем употреблять термин интеграл только в смысле п. 16.
Системы обыкновенных дифференциальных уравнений
При решении многих задач нужно найти функции y1 = y1 (x), y2 = y2 (x), . yn = yn (x), которые удовлетворяют системе дифференциальных уравнений, содержащих независимую переменную x , искомые y1 , y2 , . yn и их производные.
Пример. Пусть материальная точка массы m имеет криволинейную траекторию движения в пространстве. Определить положение точки в любой момент времени t, когда на нее действует сила  .
.
Положение точки в любой момент времени t определяется ее координатами x, y, z; следовательно, x, y, z являются функциями от t. Проекциями вектора скорости точки на оси координат будут производные x’ , y’ , z’.
Положим, что сила, а соответственно и ее проекции Fx, Fy, Fz зависят от времени t, от положения x, y, z точки и от скорости движения точки, то есть от  . Искомыми неизвестными функциями в этой задаче будут три функции x = x (t), y = y (t), z = z (t). Эти
. Искомыми неизвестными функциями в этой задаче будут три функции x = x (t), y = y (t), z = z (t). Эти
функции определяются из уравнений динамики: 
Мы получили систему трех дифференциальных уравнений второго порядка. В случае движения, когда траектория является плоской кривой, лежит, например, в плоскости Оxy, получим систему двух уравнений для определения неизвестных функций x (t) и y (t): 
Рассмотрим простейшие системы дифференциальных уравнений.
Системы дифференциальных уравнений первого порядка
Система n уравнений первого порядка с n неизвестными функциями имеет вид:
 (7.38)
(7.38)
где x — независимая переменная, y1, y2, . yn — неизвестные функции.
Если в левой части уравнений системы стоят производные первого порядка, а правые части уравнений вовсе не содержат производных, то такая система уравнений называется нормальной.
Решением системы называется совокупность функций y1, y2, . yn, которые превращают каждое уравнение системы в тождество относительно x.
Задача Коши для системы (7.38) состоит в нахождении функций y1, y2, . yn , удовлетворяющих систему (7.38) и заданные начальные условия:
 (7.39)
(7.39)
Интегрирование системы (7.38) делают следующим образом. Дифференцируем по x первое уравнение системы (7.38): 
Заменим производные
 их выражениями f1, f2, . fn из уравнений системы (7.38), получим уравнение
их выражениями f1, f2, . fn из уравнений системы (7.38), получим уравнение 
Дифференцируем полученное уравнение и, подставив в это равенство значения производных из системы (7.38), найдем 
Продолжая дальше таким образом, получим 
В результате получаем следующую систему уравнений:
 (7.40)
(7.40)
Из первых (n-1) уравнений определим y2, y3, . yn:
 (7.41)
(7.41)
и подставим их значения в последнее уравнение системы (7.40) для определения y1: 
Продифференцируем это выражение (n-1) раз, определим
 как функции от x, C1, C2, . Cn. Подставим эти функции в (7.41), найдем
как функции от x, C1, C2, . Cn. Подставим эти функции в (7.41), найдем
 (7.43)
(7.43)
Для того, чтобы полученное решение удовлетворяло заданным начальным условиям, остается только найти значение произвольных постоянных из уравнений (7.42) и (7.43) так, как мы это делали для одного дифференциального уравнения.
Пример 1. Проинтегрировать систему 
когда заданы начальные условия 
Решение. Дифференцируем по x первое уравнение, имеем:  . Подставляем сюда значение
. Подставляем сюда значение  и
и  из системы, получим
из системы, получим 

Из первого уравнения системы найдем  и подставим в полученное нами уравнение:
и подставим в полученное нами уравнение:
 или
или 
Общим решением этого уравнения является
 (*)
(*)
и тогда  (**)
(**)
Подберем постоянные С1 и С2 так, чтобы выполнялись начальные условия. На основании (*) и (**) имеем:
1 = С1 – 9; 0 = С2 – 2С1 + 14, откуда С1 = 10, С2 = 6.
Таким образом, решением системы, которое удовлетворяет заданным начальным условиям, будет: 
Системы линейных дифференциальных уравнений с постоянными коэффициентами
Система дифференциальных уравнений:
 (7.44)
(7.44)
где коэффициенты aij — постоянные числа, t — независимая переменная, x1 (t), . xn (t) —
неизвестные функции, называется системой линейных дифференциальных уравнений с постоянными коэффициентами.
Эту систему можно решать путем сведения к одному уравнению n-го порядка, как это было показано выше. Но эту систему можно решить и другим способом. Покажем, как это делается.
Будем искать решение системы (7.44) в виде:
 (7.45)
(7.45)
Надо определить постоянные α1, α2, . αn и k так, чтобы функции (7.45) удовлетворяли систему (7.44). Подставим функции (7.45) в систему (7.44): 
Сократим на e kt и преобразуем систему, сведя ее к такой системе:
 (7.46)
(7.46)
Это система линейных алгебраических уравнений относительно α1, α2, . αn. Составим определитель системы: 
Мы получим нетривиальные (ненулевые) решения (7.45) только при таких k, при которых определитель превратится в ноль. Получаем уравнение n-го порядка для определения k: 
Это уравнение называется характеристическим уравнением для системы (7.44).
Рассмотрим отдельные случаи на примерах:
1) Корни характеристического уравнения действительны и различны. Решение системы записывается в виде: 
Пример 2. Найти общее решение системы уравнений: 
Решение. Составим характеристическое уравнение:
 или k 2 – 5k + 4 = 0, корни которого k1 = 1, k2 = 4.
или k 2 – 5k + 4 = 0, корни которого k1 = 1, k2 = 4.
Решение системы ищем в виде 
Составим систему (7.46) для корня k1 и найдем  и
и  :
:
 или
или 
Откуда  Положив
Положив  получим
получим 
Итак, мы получили решение системы: 
Далее составляем систему (7.46) для k = 4: 
Откуда 
Получим второй решение системы: 
Общее решение системы будет: 
2) Корни характеристического уравнения различны, но среди них есть комплексные:
k1 = α + iβ, k2 = α – iβ. Этим корням будут отвечать решения:
 (7.47)
(7.47)
 (7.48)
(7.48)
Можно доказать также, что истинные и мнимые части комплексного решения также будут решениями. Таким образом, получим два частных решения:
 (7.49)
(7.49)
где  — действительные числа, которые определяются через
— действительные числа, которые определяются через  .
.
Соответствующие комбинации функций (7.49) войдут в общий решение системы.
Пример 3. Найти общее решение системы 
Решение. Составляем характеристическое уравнение:
 или k 2 + 12k + 37 = 0, корни которого k1 = –6 + i, k2 = –6 – i .
или k 2 + 12k + 37 = 0, корни которого k1 = –6 + i, k2 = –6 – i .
Подставляем поочередно k1, k2 в систему (7.46), найдем 
Запишем уравнение (7.47) и (7.48) для наших данных 
Перепишем эти решения в таком виде:

За частные решения можно взять отдельно действительные и отдельно мнимые части: 
Общим решением системы будет



Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Кривые и поверхности второго порядка в математике с примерами решения и образцами выполнения
Кривая второго порядка — геометрическое место точек плоскости, прямоугольные координаты которых удовлетворяют уравнению вида.
Кривые второго порядка используются при решении задач по аналитической геометрии, кривые других порядков используются при решении задач математического анализа в разделе вычисления кратных, криволинейных и поверхностных интегралов.

Кривые и поверхности второго порядка
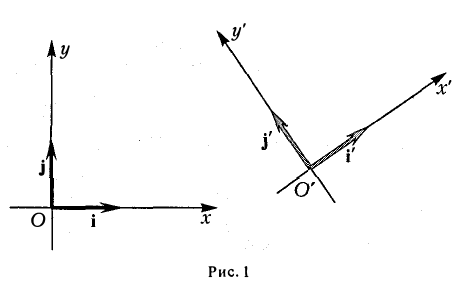
Преобразование координат на плоскости
Пусть на плоскости заданы две прямоугольные декартовы системы координат, Оху и О’х’у’ (рис. 1). Произвольная точка М относительно одной из этих координатных систем определяется парой чисел х и у, а относительно другой — парой чисел x’ и у’. Ясно, что между парами (х,у) и (x’, у’) имеется связь. Найдем ее.
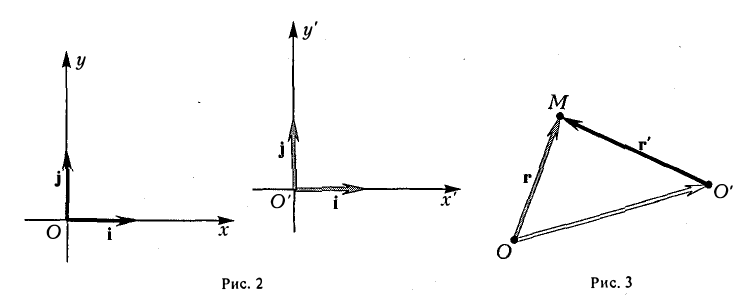
Параллельный перенос
Предположим, что соответствующие координатные оси параллельны и сонаправлены, а точки начала отсчета различны. Это означает, что орты координатных осей соответственно равны (рис. 2).
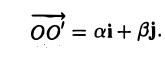
Пусть г и г’ — радиусы-векторы точки М, т.е.

и а, β — координаты точки О’ относительно системы координат Оху, т. е.


Поворот
Предположим, что координатные оси одной системы координат получаются из координатных осей другой системы поворотом на угол φ, а начальные точки совпадают (рис.4). Координатами единичного вектора i’ являются косинусы углов φ и  , образованных этим вектором с осями Ох и Оу:
, образованных этим вектором с осями Ох и Оу:

а координатами единичного вектора j’ служат косинусы углов и φ:

(рис. 5). Так как радиус-векторы

произвольной точки М в рассматриваемом случае равны,
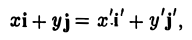
то, заменяя векторы i’ и j’ их выражениями, получаем, что

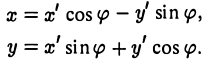
Зеркальное отражение
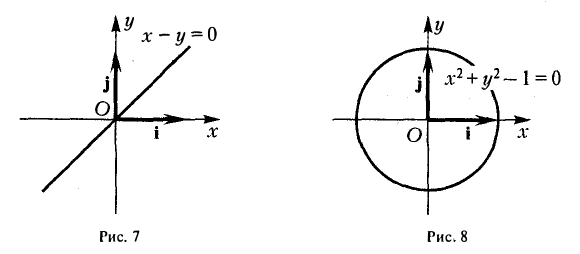
В случае, когда оси абсцисс Ох и Ох’ координатных систем совпадают, а оси ординат Оу и Оу’ направлены противоположно, координаты (х, у) и (х’,у’) произвольной точки М связаны равенствами

Справедливо следующее утверждение.
Любое преобразование прямоугольных декартовых координат (с сохранением масштаба) можно представить в виде последовательного выполнения переноса, поворота и <если необходимо) зеркального отражения.
Кривые второго порядка
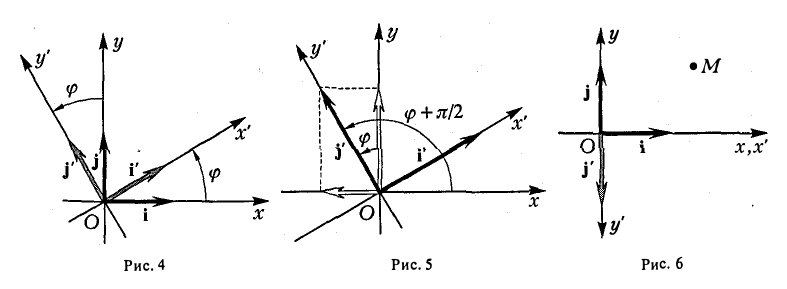
Пусть на плоскости задана прямоугольная декартова система координат Оху. Множество точек плоскости, координаты х и у которых удовлетворяют равенству
F(x, у) = 0,
где F(x, у) — некоторая функция двух переменных, называется плоской кривой, или плоской линией само равенство называется уравнением данной линии (кривой).
Например, равенство х — у = 0 есть уравнение прямой — биссектрисы первого и третьего координатных углов (рис. 7). Равенство x 2 + y 2 — 1 = 0 — уравнение окружности единичного радиуса с центром в начале координат (рис. 8).
Рассмотрим многочлен второй степени от двух переменных х и у:

F(x,y) = 0
будем называть уравнением линии (кривой) второго порядка.
Если линиями первого порядка являются именно прямые и только они, то множество кривых второго порядка заметно разнообразней. Поэтому исследованию общего уравнения кривой второго порядка естественно предпослать изучение некоторых частных, но важных случаев.
Эллипс
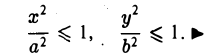
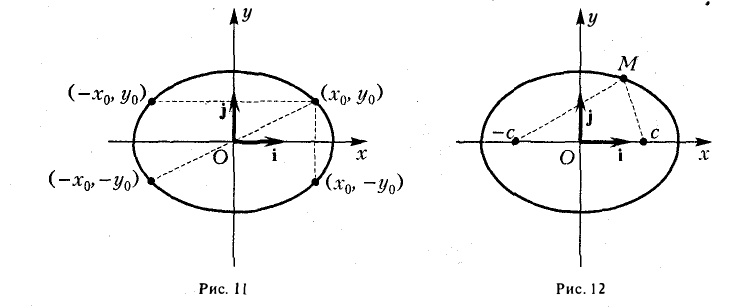
Эллипсом называется кривая, уравнение которой в некоторой прямоугольной декартовой системе координат Оху имеет вид (1)
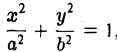
Система координат Оху, в которой уравнение эллипса имеет вид (1), называется канонической (для данного эллипса); само уравнение (!) называется каноническим уравнением эллипса. Окружность

является частным случаем эллипса (при а = b). Это позволяет несложным способом определить форму эллипса: эллипс (1) получается из окружности (2) путем ее равномерного сжатия» к оси Ох (с коэффициентом ), т.е. заменой в уравнении x 2 + y 2 = a 2 координаты у на
), т.е. заменой в уравнении x 2 + y 2 = a 2 координаты у на  (рис.9).
(рис.9).
Свойства эллипса
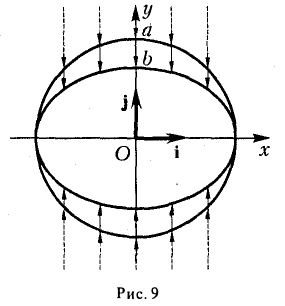
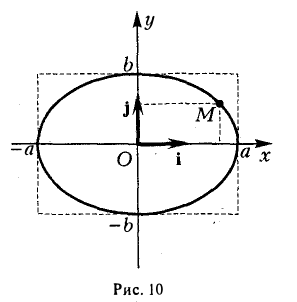
- Эллипс (I) содержится в прямоугольнике

В этом легко убедиться, заметив, что, если точка М(х, у) принадлежит эллипсу (1), то (рис. 10)
Точки (±а, 0), (0, ±b) называются вершинами эллипса.
2. Координатные оси Ох и Оу канонической системы являются осями симметрии эллипса, а начало координат О — его центром симметрии. Это означает, что если точка Мо(хo, yо) принадлежит эллипсу, то точки (-хо, yо), (-xо, -yо) и (хо, -yо) также ему принадлежат (рис. 11).
3. Если эллипс не является окружностью, то координатные оси канонической системы — единственные оси симметрии.
Положим с =  . Ясно, что с 0 называется преобразование, переводящее произвольную точку М(х, у) окружности в точку М’ (
. Ясно, что с 0 называется преобразование, переводящее произвольную точку М(х, у) окружности в точку М’ ( ).
).
Пусть сначала М(х, у) — произвольная точка эллипса
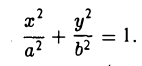
Вычислим ее расстояния от фокусов эллипса (рис. 12). Имеем

Заменяя y 2 его выражением
после несложных преобразований получаем, что

Последнее равенство вытекает из того, что 
Легко убедиться в том, что

Доказательство того, что точки, обладающие указанным свойством, принадлежат эллипсу, было проведено ранее (см. раздел «Простейшие задачи аналитической геометрии» Введения, задача 2).

называется эксцентриситетом эллипса (I). Ясно, что 0 
называются директрисами эллипса. У каждого эллипса две директрисы — левая и правая (рис. 13).
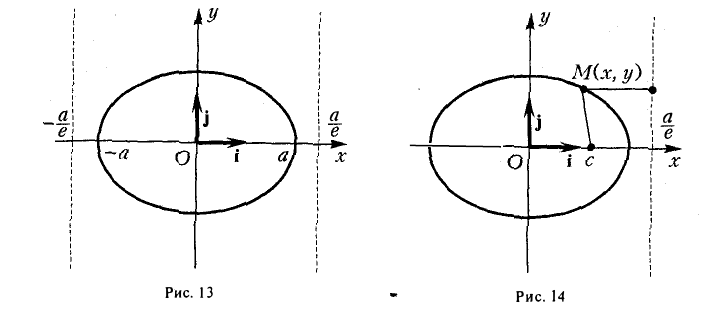
5. Эллипс есть множество точек плоскости, отношение расстояний от которых до данной точки (фокуса эллипса) и доданной прямой (одноименной с фокусом директрисы эллипса) постоянно (равно эксцентриситету эллипса).
Пусть сначала М(х,у) — произвольная точка эллипса (1). Вычислим расстояния от нее до правого фокуса и до правой директрисы (рис. 14). Имеем соответственно
Откуда легко получаем требуемое

Аналогично проверяется, что
Рассмотрим теперь на плоскости точку (с, 0) и прямую х = (с = ае). Возьмем произвольную точку М(х, у) и вычислим расстояния от нее до выбранной точки (с, 0) —
(с = ае). Возьмем произвольную точку М(х, у) и вычислим расстояния от нее до выбранной точки (с, 0) —
— и до выбранной прямой —

Возведем обе части последнего соотношения в квадрат и, положив  и учтя равенство с = ае, после простых преобразований получим
и учтя равенство с = ае, после простых преобразований получим
Тем самым, точка М(х,у) лежит на эллипсе (1).
Гипербола
Гиперболой называется кривая, уравнение которой в некоторой прямоугольной системе координат Оху имеет вид (1)
Система координат Оху, в которой уравнение гиперболы имеет вид (1), называется канонической (для данной гиперболы); само уравнение (1) называется каноническим уравнением гиперболы.
Свойства гиперболы
- Гипербола (1) лежит вне полосы |x|
и, значит, |x| ≥ а (рис. 15).
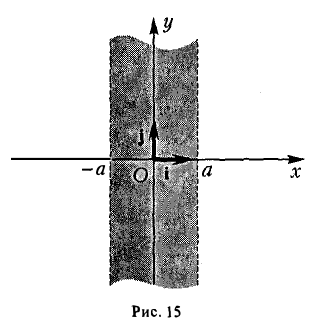
Точки (±а, 0) называются вершинами гиперболы.
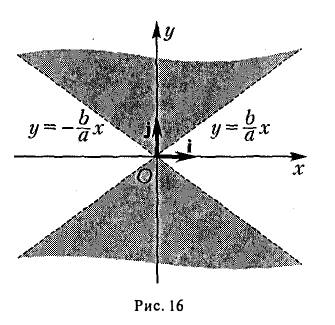
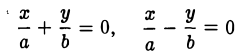
2. Гипербола (1) лежит в вертикальных углах, образованных прямыми у = ±х и содержащих точки оси Ох (рис. 16).
вытекает, что если точка М(х, у) лежит на гиперболе (1), то
Таким образом, гипербола состоит из двух частей — ветвей гиперболы, левой и правой. Прямые
называются асимптотами гиперболы.
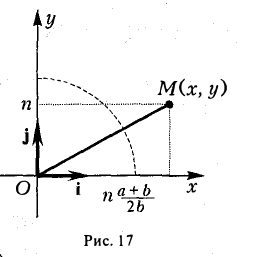
3, На гиперболе лежат точки, сколь угодно далекие от начала координат O(0, 0).
Пусть, например, точка М(х, у) лежит на гиперболе (1) и \у\ = n, где n — произвольное положительное число (рис. 17).
Возьмем в первой четверти две точки: точку гиперболы (1) и точку ее асимптоты  = 0 с одинаковой абсциссой х > а —
= 0 с одинаковой абсциссой х > а —
соответственно — и вычислим расстояние между ними. Имеем

Умножив и разделив полученное выражение на сумму х + и перейдя затем к пределу при
и перейдя затем к пределу при  получим
получим
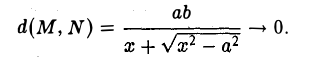
Тем самым, установлен следующий факт.
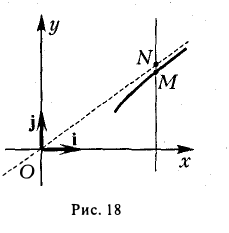
4. Если текущая точка асимптоты неограниченно удаляется от начала координат, т.е. \х\ —» + ∞, то на гиперболе можно указать соответствующую ей точку так, чтобы расстояние между ними стремилось к нулю (рис. 18).
Верно и обратное.
стремится к нулю.
6. Оси канонической координатной системы являются осями симметрии гиперболы, а начало координат — ее центром симметрии (рис. 19).
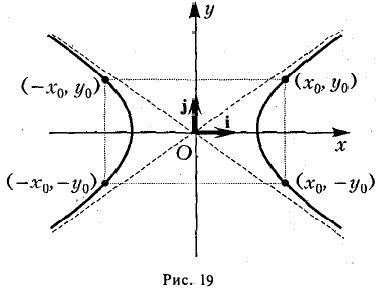
Координатные оси канонической системы — единственные оси симметрии гиперболы.
Положим с =  . Ясно, что с > 0. .Точки (-с, 0) и (с, 0) называются фокусами гиперболы, 2с — фокусное расстояние.
. Ясно, что с > 0. .Точки (-с, 0) и (с, 0) называются фокусами гиперболы, 2с — фокусное расстояние.
Гипербола есть множество точек, абсолютная величина разности расстояний от которых до двух данных точек (фокусов гиперболы) постоянна (равна заданному числу).
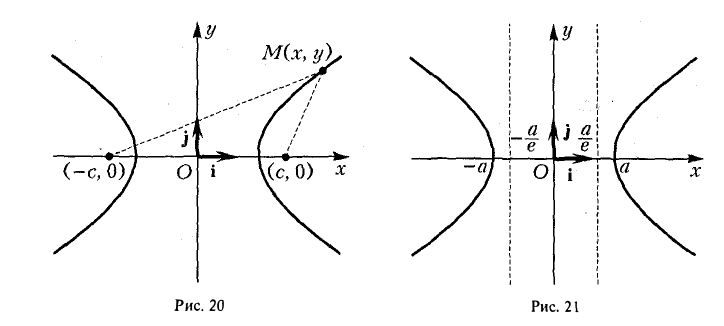
Доказательство этого свойства проводится так же, как и доказательство свойства 4 эллипса. Покажем, например, что каждая точка гиперболы обладает указанным свойством. Если М(х, у) — точка гиперболы (1), то расстояния от нее до фокусов соответственно равны
(рис. 20). Так как  > 1, то
> 1, то

Отсюда нетрудно вычислить, что



называется эксцентриситетом гиперболы (1). Ясно, что е > 1. Прямые
называются директрисами гиперболы (рис. 21). У каждой гиперболы две директрисы — левая и правая.
Практически также, как и для эллипса, доказывается следующий факт.
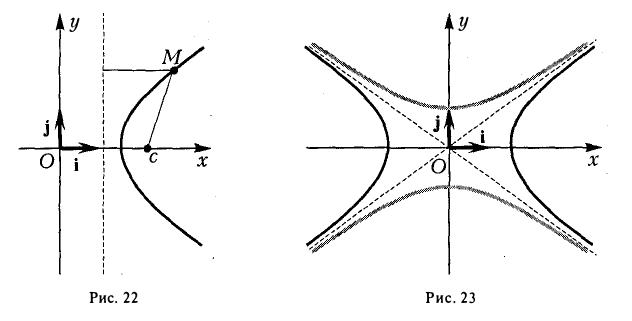
8. Гипербола есть множество точек, отношение расстояний от которых до данной точки (фокуса гиперболы) и доданной прямой (одноименной с фокусом директрисы) постоянно (равно эксцентриситету гиперболы) (рис. 22).
Гипербола (2)
называется сопряженной гиперболе (1). Взаимное расположение гипербол (1) и (2) указано на рис. 23.
Парабола
Параболой называется кривая, уравнение которой в некоторой прямоугольной декартовой системе координат Оху имеет вид (1)

Система координат Оху, в которой уравнение параболы имеет вид (1), называется канонической (для данной параболы); уравнение (]) называется каноническим уравнением параболы.
Свойства параболы
- Все точки параболы лежат в правой полуплоскости: х ≥ 0 (рис. 25). Точка 0(0, 0) лежит на параболе и называется ее вершиной.
- На параболе лежат точки, сколь угодно далеко расположенные от начала координат О(0, 0).
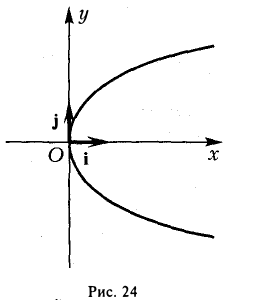
- Ось абсцисс канонической координатной системы является (единственной) осью симметрии параболы (рис. 26).
Ось симметрии параболы называется осью параболы. Число р называется фокальным параметром параболы; точка ( ; 0) — фокус параболы; прямая х = — директриса параболы.
; 0) — фокус параболы; прямая х = — директриса параболы.
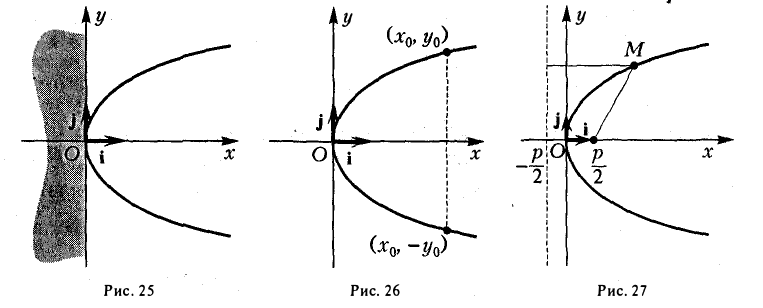
4. Парабола есть множество точек, равноудаленных отданной точки (фокуса параболы) и от данной прямой (директрисы параболы) (рис. 27).
Пусть точка М(х, у) лежит на параболе (1). Вычислим расстояния от нее до фокуса (;0)
и до директрисы х = —

Заменяя у 2 его выражением 2рх, легко убеждаемся в том, что

Верно и обратное. Если для некоторой точки М(х, у) расстояния от нее до точки (; 0) и до прямой х = — равны —
то, возводя в квадрат, после простых преобразований получаем, что эта точка лежит на параболе:
Оптическое свойство кривых второго порядка
Касательные к эллипсу и гиперболе
Если кривая задана уравнением
y = f(x)
то уравнение касательной к ней, проходящей через точку (хо,у0)> где Уо = f(xо), можно записать в следующем виде

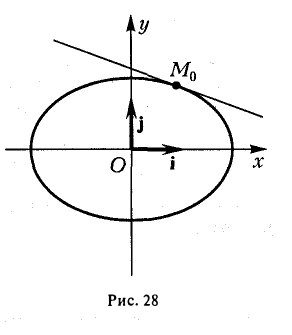
Пусть Мо(хо, yо) — точка эллипса
Предположим для определенности, что точка М0 лежит в первой четверти, т. е. хо > 0, yо > 0. Тогда часть эллипса, лежащую в первой четверти, можно описать уравнением
Пользуясь формулой (1), получаем уравнение касательной к эллипсу в точке Мо
а так как точка (х0, у о) лежит на эллипсе, то
Полученное соотношение после несложных преобразований можно записать так:
Отсюда с учетом тождества
приходим к уравнению
(рис. 28). Полученное соотношение является уравнением касательной к эллипсу, проходящей через его точку (х0, yо), и в общем случае ее произвольного расположения, т. е. при любых знаках хо и уо.
Уравнение касательной к гиперболе выводится аналогично и имеет следующий вид
Подчеркнем, что точка (хо, yо) лежит на гиперболе.
Касательные к параболе
Если кривая задана уравнением
х = g(у),
то уравнение касательной к ней, проходящей через точку (хo,уo), где х0 = g (уо), можно записать в следующем виде

Пусть М0(х0, у0) — точка параболы. Пользуясь формулой (I), получаем уравнение касательной к параболе

Отсюда в силу равенства  приходим к уравнению касательной вида
приходим к уравнению касательной вида

Замечание:
Сопоставляя канонические уравнения эллипса, гиперболы и параболы с уравнениями касательных к этим кривым, нетрудно заметить, что для получения последних не требуется специальных вычислений. В самом деле, заменяя у 2 на уу 0 , а х 2 на хх 0 (в случае параболы 2х нужно заменить на x + х 0 ). приходим к уравнению соответствующей касательной. Еще раз отметим, что сказанное справедливо лишь в том случае, когда точка (x 0 . y 0 ) лежит на кривой.
Оптическое свойство эллипса
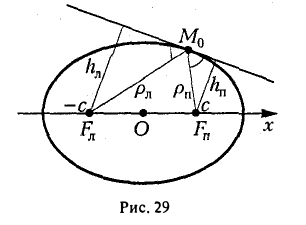
Пусть М 0 — произвольная точка эллипса
Как уже отмечалось, расстояния от нее до фокусов Fл и F n — фокальные радиусы — равны соответственно

Проведем через точку М 0 касательную к эллипсу,
и вычислим, на каком расстоянии от этой касательной лежат фокусы Fл (-c, 0) и Fn (c; 0) (напомним, что для этого следует воспользоваться формулой (10).

— нормирующий множитель (рис. 29). Нетрудно проверить, что


Обратившись к рис.29, заметим, что вычисленные отношения равны синусам углов, образованных касательной и фокальными радиусами точки касания. Из того, что синусы этих углов равны, вытекает равенство и самих углов. Тем самым доказано оптическое свойство эллипса: касательная к эллипсу образует равные углы с фокальными радиусами точки касания.
Это свойство называется оптическим по следующей причине: если поместить в один из фокусов эллипса с зеркальной «поверхностью» точечный источник света, то все лучи после отражения от «поверхности» эллипса сойдутся в другом его фокусе (рис. 30).
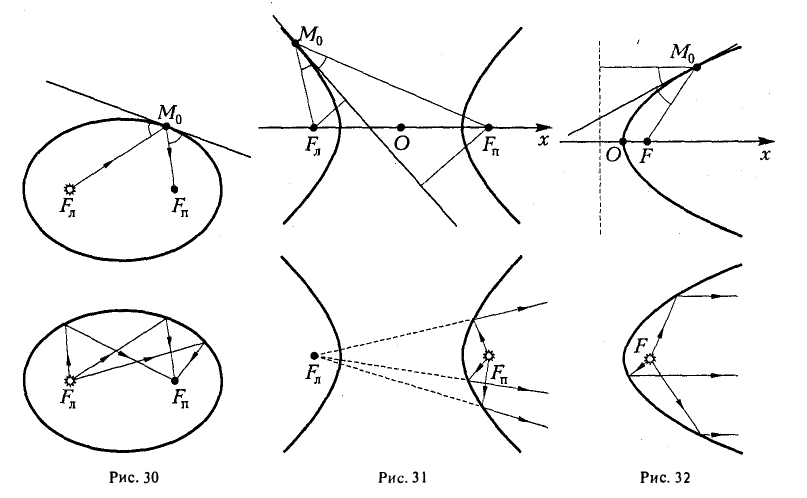
Оптическое свойство гиперболы
Устанавливается аналогичными выкладками и заключается в следующем.
Если поместить в один из фокусов гиперболы точечный источник света, то каждый луч после отражения от зеркальной «поверхности» гиперболы видится исходящим из другого фокуса (рис. 31).
Оптическое свойство параболы
Если в фокус параболы помещен точечный источник света, то все лучи, отраженные от зеркальной «поверхности» параболы, будут направлены параллельно оси параболы (рис. 32).
Классификация кривых второго порядка
Многочлены второй степени на плоскости
Теорема:
Пусть на плоскости введена прямоугольная декартова система координат Оху и пусть

— многочлен второй степени от переменных х и у.
Тогда на плоскости можно построить прямоугольную дека ртов у систему координат O’XY так, что после замены переменных х и у на переменные X и Y исходный многочлен f(x, у) приведется к многочлену F(X, Y) одного из следующих трех видов:
1-й шаг. Поворотом координатных осей на подходящим образом выбранный угол всегда можно добиться того, чтобы коэффициент при произведении разноименных координат обратился в нуль.
Пусть b ≠ 0 (при 6 = 0 этот шаг не нужен). Повернем оси координат вокруг точки О. Эта операция описывается следующими формулами

При этом координатные оси исходной системы Оху поворачиваются на угол φ (рис.33).
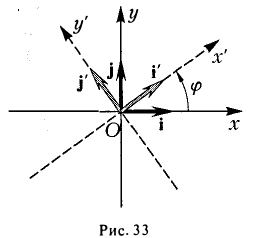
Заменим переменные х и у в формуле (1) их выражениями (2) через x’ и у’ и вычислим коэффициент 2b’ при произведении х’у’. Он равен

и обращается в нуль, если
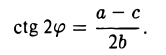
Так как полученное уравнение разрешимо относительно φ, то указанным преобразованием всегда можно добиться обращения в нуль нужного коэффициента.
Приступая ко второму этапу преобразования, будем считать, что исходный многочлен f(x,у) уже имеет вид

где а 2 + с 2 >0. Для определенности положим с ≠ 0 (это не ограничивает общности наших рассуждений, так как заменой х, у в случае необходимости этого всегда можно добиться).
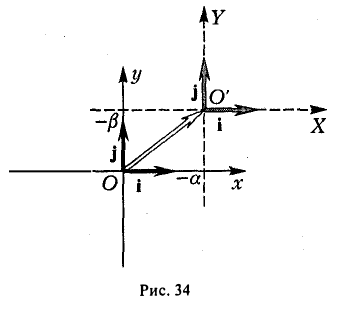
2-й шаг. Переносом начала координат можно достичь дальнейшего упрощения вида многочлена f(x,y). Эта операция описывается следующими формулами:
координатные оси новой системы O’XY получаются из координатных осей исходной системы Оху параллельным переносом в точку (-а, — β) (рис. 34).
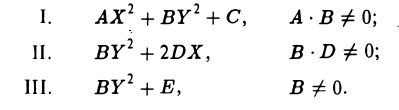
Укажем конкретные значения а и β. Возможны три случая
I. а ≠ 0, с ≠ 0. Тогда, полагая

где А = а, В = с, С = g —
II. а = 0, d ≠ 0. Тогда, полагая

III. а = d = 0. Тогда, полагая

где В = с, Е = g — 
Канонические уравнения кривых второго порядка
Если многочлен второй степени F(X, У) приравнять к нулю, то получим уравнение линии второго порядка
F(X, У) = 0.
Рассмотрим каждый из трех полученных выше случаев I, II, III отдельно.
I. 
Э. А • В > 0. Домножением обеих частей уравнения на — 1 и заменой X на У, а У на X (в случае необходимости) всегда можно добиться того, чтобы В ≥ А > 0.
- С
(мнимый эллипс)2). На действительной плоскости нет ни одной точки (X, Y), координаты которой обращали бы это уравнение в тождество.
Точка (0, 0) является единственной точкой плоскости, координаты которой удовлетворяют этому уравнению; точку (0,0) можно мыслить как действительную точку пересечения двух мнимых пересекающихся прямых 3).
Г. А • В 0, В 

— пару пересекающихся прямых:

2) Название можно объяснить некоторым сходством этого уравнения с уравнением эллипса.
3) Название можно объяснить некоторым сходством этого уравнения с уравнением пары пересекающихся
прямых.
II. BY 2 + 2DX = О, В • D ≠ 0.
Всегда можно добиться того, чтобы В • D 

III. BY 2 + Е = 0, В ≠ 0. Можно считать, что В > 0.
1. Е 
Y 2 — с 2 = 0, с > 0
— пару параллельных прямых.
Y 2 — с 2 = 0, с 2 = 0
— пара совпадающих прямых.
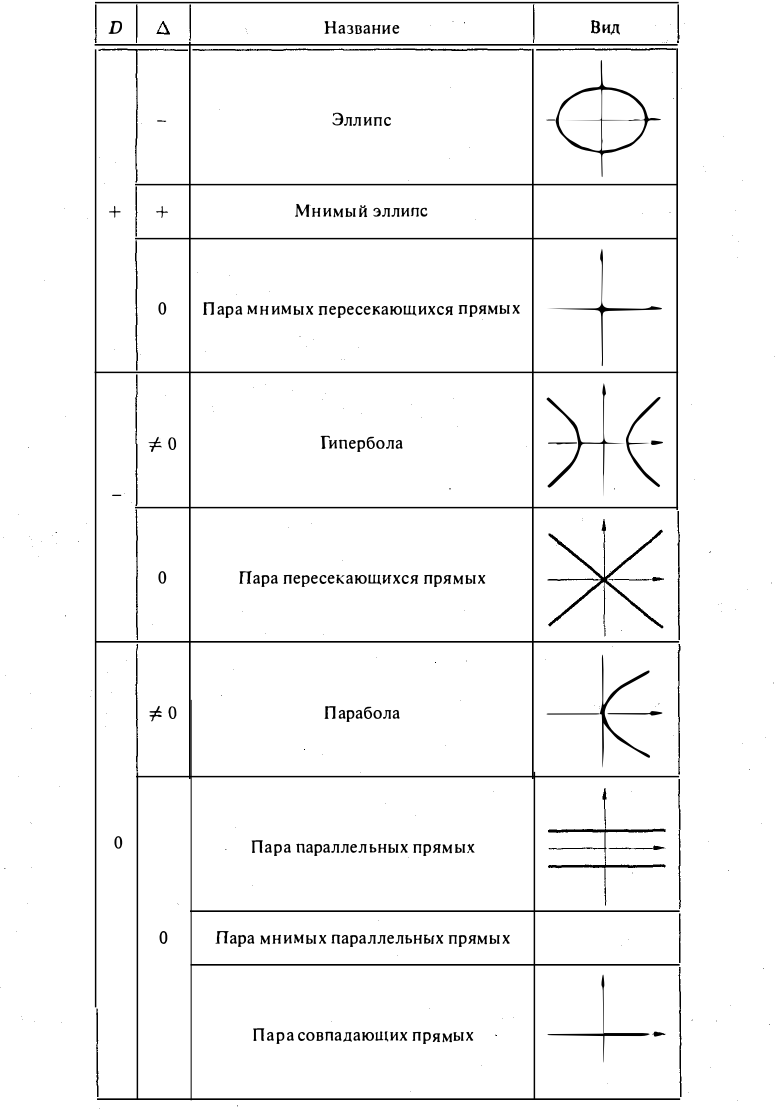
Чтобы определить тип кривой второго порядка, не обязательно проводить все указанные выше преобразования. Достаточно вычислить знаки некоторых выражений, составленных из коэффициентов уравнения.

— уравнение линии второго порядка. Введем следующие обозначения
Числа D и ∆ не зависят от выбора системы координат на плоскости и называются инвариантами. Из приводимой таблицы видно, какому сочетанию знаков определителей D и ∆ соответствует та или иная линия второго порядка.
Задача:
Убедитесь в том, что D и ∆ при рассмотренных преобразованиях системы координат действительно остаются неизменными.
4) Название можно объяснить некоторым сходством этого уравнения с уравнением пары параллельных прямых.
Поверхности второго порядка
Пусть в пространстве задана прямоугольная декартова система координат Oxyz. Множество точек пространства, координаты х, у и z которых удовлетворяют равенству
F(x, у, z) = О,
называется поверхностью; равенство (*) называется уравнением этой поверхности.
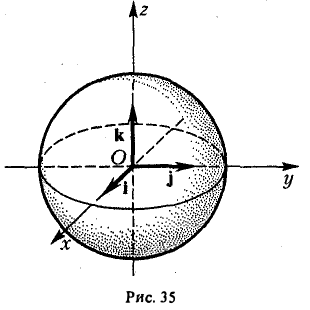
Пример:

— уравнение сферы радиуса о с центром в точке (0,0,0) (рис. 35).
Рассмотрим многочлен второй степени от трех переменных х, у и z

Уравнение
F(x, y, z) = 0
будем называть уравнением поверхности второго порядка.
Исследование общего уравнения поверхностей второго порядка оказывается зна-чительноболее сложным, чем исследование общего уравнения кривых второго порядка, требует разработки соответствующего математического аппарата и будет проведено в конце главы VI.
В оставшихся параграфах этой главы мы сначала остановимся на изучении геометрических свойств некоторых важных классов общих поверхностей; затем используем их для рассмотрения канонических уравнений основных поверхностей второго порядка и исследования структуры этих поверхностей.
Некоторые классы поверхностей
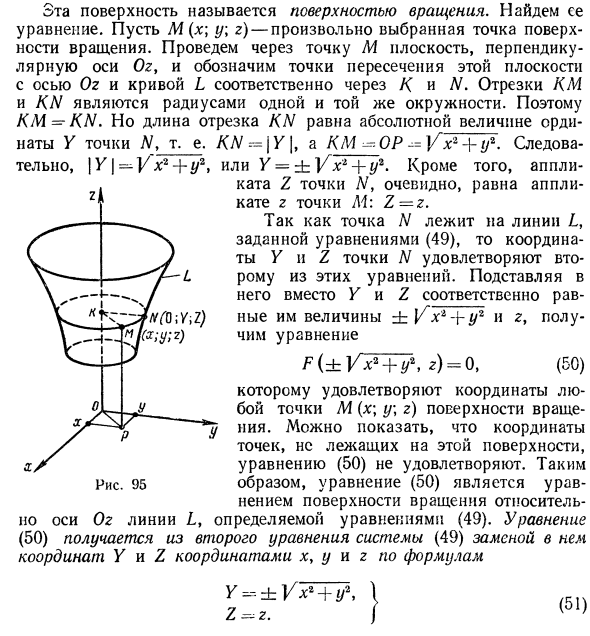
Поверхности вращения
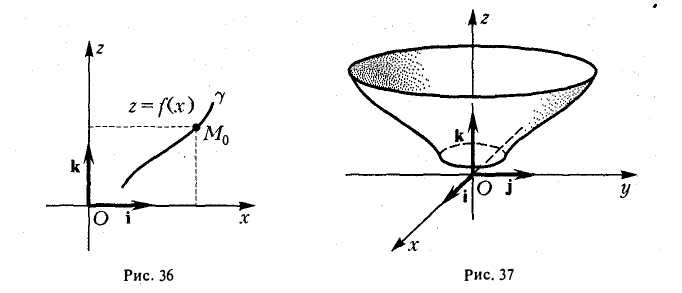
Рассмотрим на плоскости Oxz кривую γ, заданную уравнением
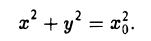
г = f(x), х ≥ 0
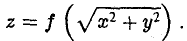
(рис. 36). При вращении кривой γ вокруг оси Oz она будет заметать некоторую поверхность, называемую поверхностью вращения (рис. 37). Найдем уравнение этой поверхности, т. е. равенство, которому должны удовлетворять координаты точек построенной поверхности и только они.
Тем самым, координаты х, у и z0 любой точки М этой окружности связаны следующим равенством

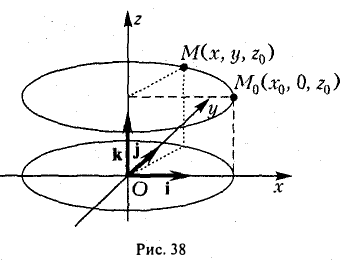
В силу произвольности выбора точки М0 на кривой γ искомое уравнение полученной поверхности вращения имеет вид
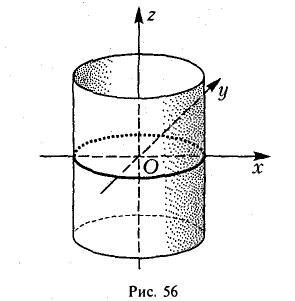
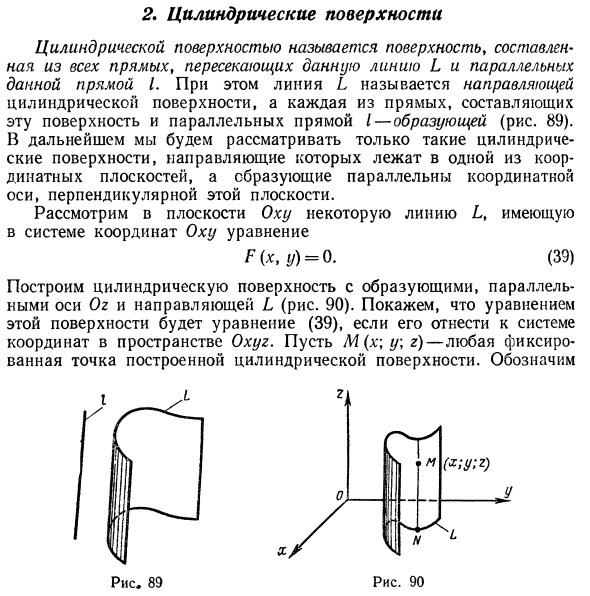
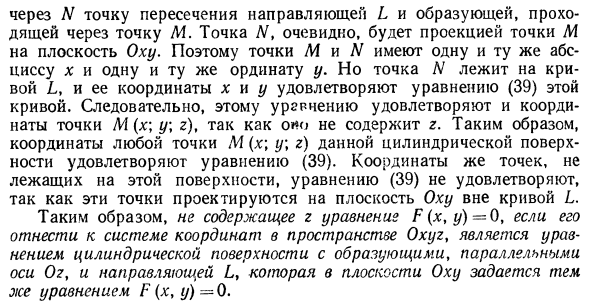
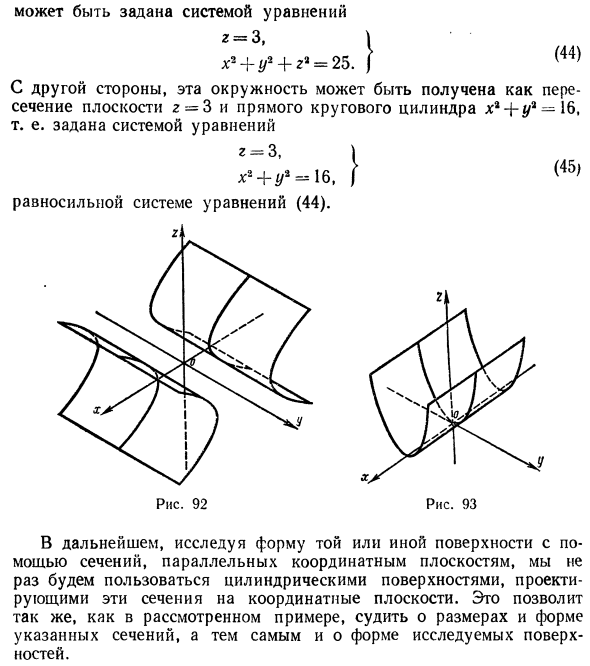
Цилиндрические поверхности
Через каждую точку некоторой заданной кривой γ проведем прямую l параллельно заданной прямой l0. Множество точек, лежащих на так построенных прямых, назовем цилиндрической поверхностью (рис. 39); кривая γ называется направляющей цилиндрической поверхности, а прямая l — ее образующей.
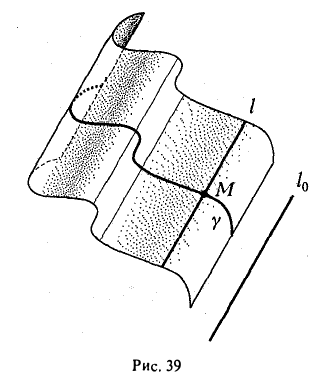
Найдем уравнение, описывающее цилиндрическую поверхность.
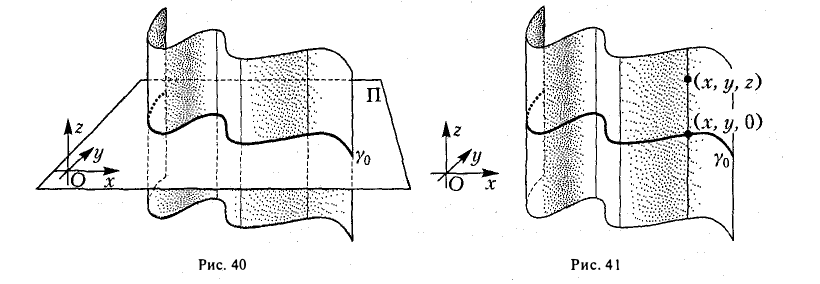
Возьмем произвольную точку О и проведем через нее плоскость П, перпендикулярную образующей I. Построим в пространстве прямоугольную координатную систему Oxyz, взяв за ось Oz прямую, перпендикулярную плоскости П. Тогда плоскость П будет координатной плоскостью Оху (рис.40). Плоскость П пересекает цилиндрическую поверхность по направляющей γ0.
F(x,y) = 0
— уравнение этой направляющей. Убедимся в том, что последнее соотношение можно считать уравнением искомой цилиндрической поверхности.
самом деле, пусть (х, у, z) — точка цилиндрической поверхности (рис. 41). Тогда точка (х, у, 0) лежит на γ0 и, значит, удовлетворяет уравнению
F(x,y)=0.
Но координаты точки (х, у, z) также обращают это уравнение в тождество. Последнее обстоятельство и позволяет считать соотношение F(x,y) = 0 искомым уравнением.
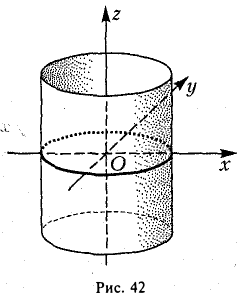
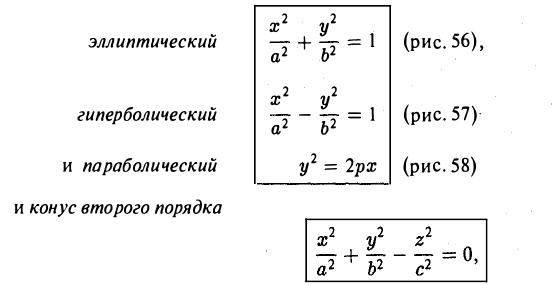
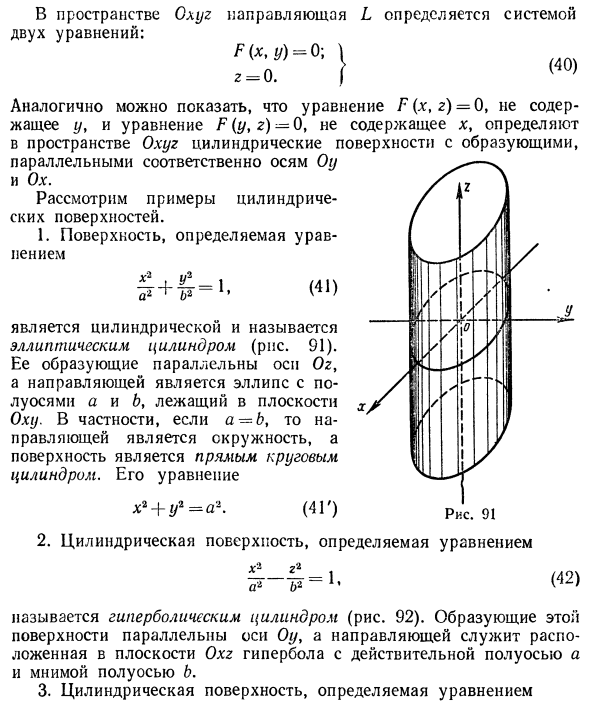
Пример:
Введем в пространстве прямоугольные декартовы координаты Охуz. Соотношение

является уравнением цилиндрической поверхности (эллиптического цилиндра) (рис. 42).
Замечание:
F(y, z) = 0
описывает цилиндрическую поверхность с образующей, параллельной координатной оси Оx, а уравнение
F(x,z) = 0
— цилиндрическую поверхность с образующей, параллельной оси Oy.
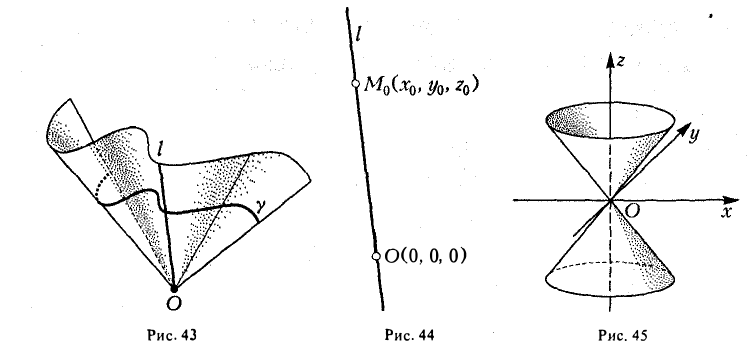
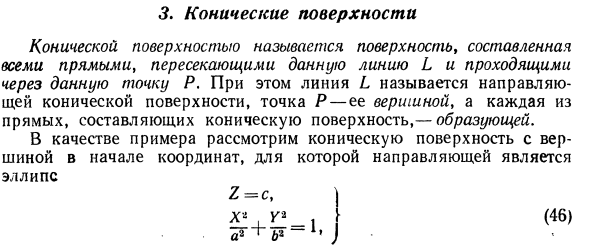
Конические поверхности
Пусть γ — произвольная кривая и О — точка вне eе. Через каждую точку кривой γ и точку О проведем прямую l. Множество точек, лежащих на построенных таким образом прямых, называется конической поверхностью (рис.43); кривая γ — направляющая конической поверхности, l — ее образующая, точка О — вершина. Рассмотрим функцию
F (x, у, z)
переменных х, у и z. Функция F(x, у, z) называется однородной функцией степени q, если для любого t > 0 выполняется равенство

Покажем, что если F(x, у, z) однородная функция, то F
является уравнением конической поверхности.
В самом деле, пусть
т.е. точка М0(xo, уо, zо) лежит на этой поверхности. Будем считать, что  . Проведем через эту точку и точку 0(0,0, 0) (считая, что F(0,0, 0) = 0) прямую I (рис. 44). Ее параметрические уравнения имеют вид
. Проведем через эту точку и точку 0(0,0, 0) (считая, что F(0,0, 0) = 0) прямую I (рис. 44). Ее параметрические уравнения имеют вид

Подставляя полученные выражения для х, у и z в функцию F(x, у, z), видим, что

Это означает, что вся прямая l лежит на поверхности, определяемой уравнением F(x,y,z) = 0, которое, следовательно, и описывает коническую поверхность.
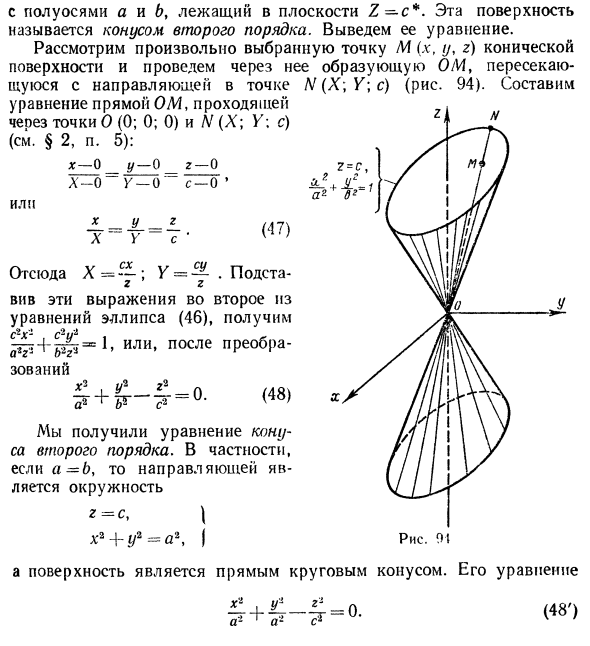
Пример:
является однородной функцией второй степени:

— уравнение конической поверхности (конуса второго порядка) (рис.45).
Воспользуемся теперь полученными выше результатами для исследования геометрической формы поверхностей второго порядка.
Эллипсоид. Гиперболоиды. Параболоиды. Цилиндры и конус второго порядка
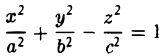
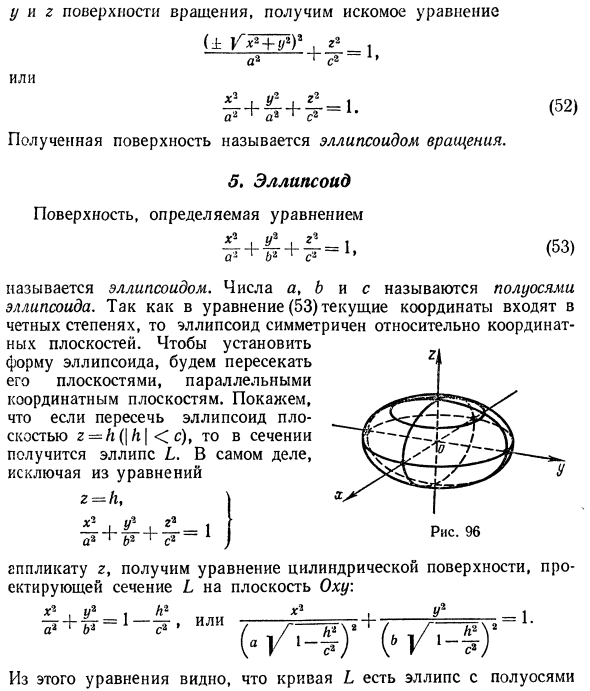
Эллипсоид
Эллипсоидом называется поверхность, уравнение которой в некоторой прямоугольной декартовой системе координат Oxyz имеет вид
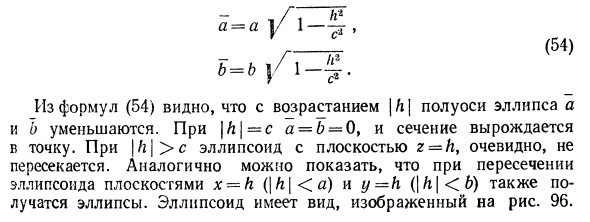
где а ≥ b ≥ с > 0. Для того, чтобы выяснить, как выглядит эллипсоид, поступим следующим образом. Возьмем на плоскости Oxz эллипс
и будем вращать его вокруг оси Oz (рис. 46).
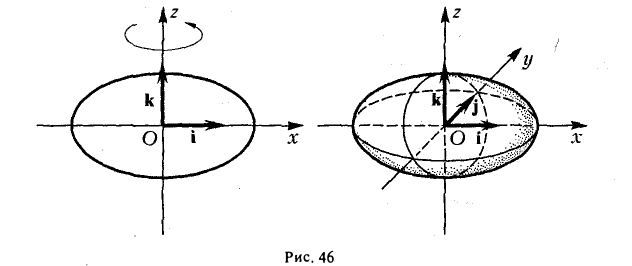
— эллипсоид вращения — уже дает представление о том, как устроен эллипсоид общего вида. Чтобы получить его уравнение, достаточно равномерно сжать эллипсоид вращения . вдоль оси Оу с коэффициентом —  ≤ 1, т. с. заменить в его уравнении у на
≤ 1, т. с. заменить в его уравнении у на  y 5).
y 5).
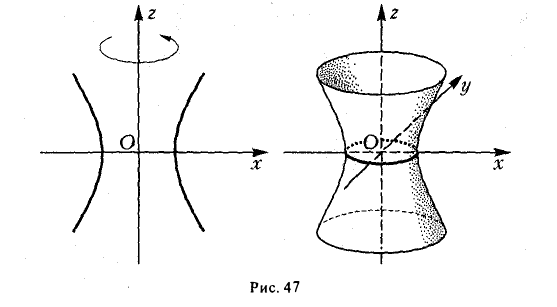
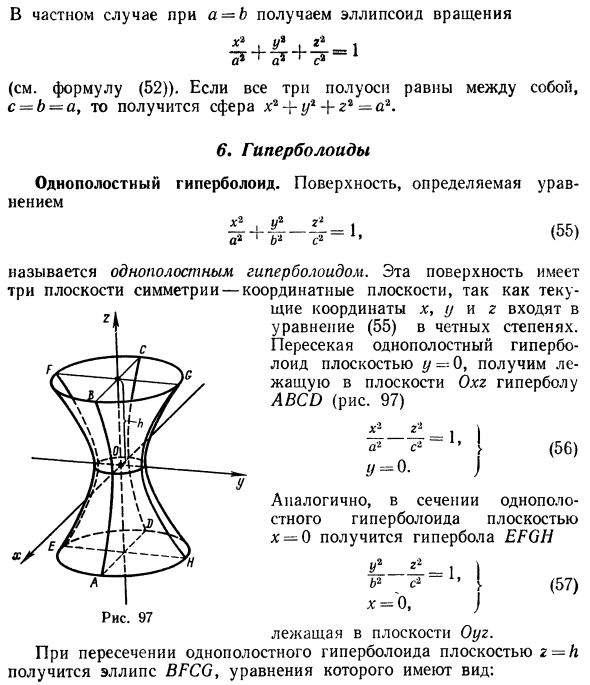
Гиперболоиды
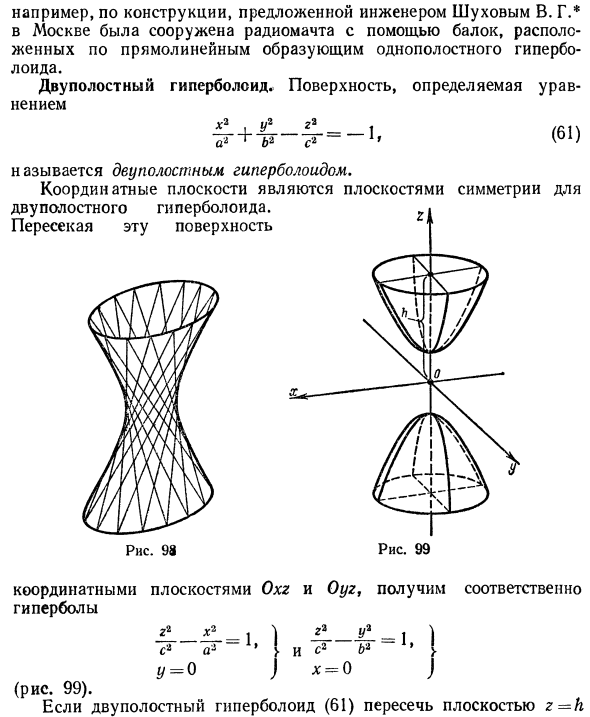
вокруг оси Oz (рис. 47), получим поверхность, называемую однополостным гиперболоидом вращения. Его уравнение имеет вид
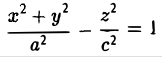
получается тем же способом, что и в случае эллипсоида вращения.
5) Эллипсоид вращения («) можно получить равномерным сжатием сферы х 2 + у 2 + z 2 = а 2 вдоль оси Оz с коэффициентом —  ≤ 1.
≤ 1.
Путем равномерного сжатия этой поверхности вдоль оси Оу с коэффициентом ≤ 1 получим однополостный гиперболоид общего вида. Его уравнение
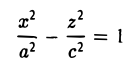
получается тем же способом, что и в разобранном выше случае эллипсоида. Путем вращения вокруг оси Oz сопряженной гиперболы
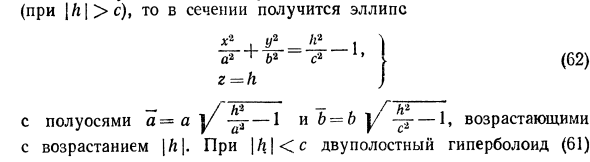
получим двуполостный гиперболоид вращения (рис.48). Его уравнение
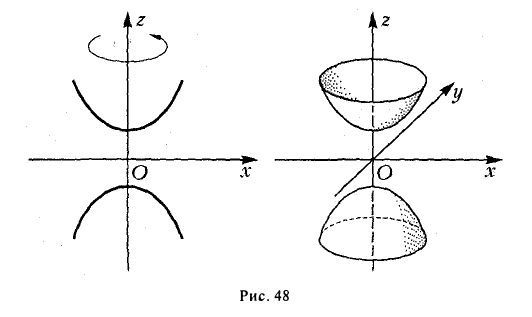
Путем равномерного сжатия этой поверхности вдоль оси Оу с коэффициентом ≤ 1 приходим к двуполостному гиперболоиду общего вида. Заменой у на у получаем его уравнение
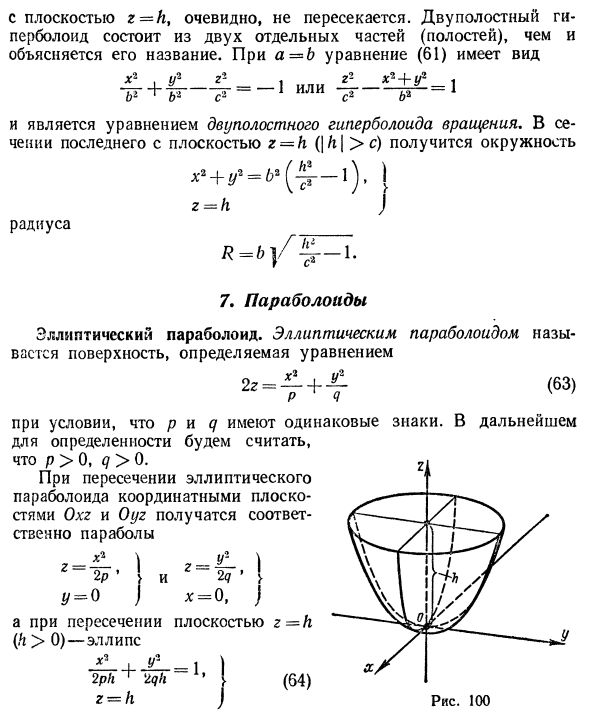
Эллиптический параболоид

вокруг оси Oz (рис.49), получаем параболоид вращения. Его уравнение имеет вид
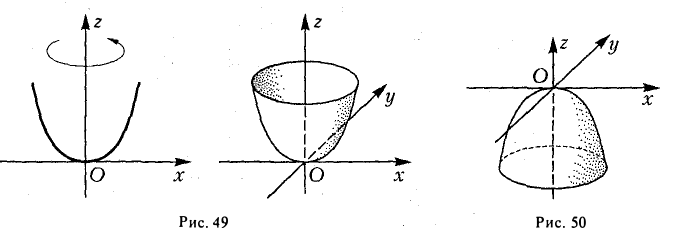
Путем сжатия параболоида вращения вдоль оси Оу с коэффициентом  получаем эллиптический параболоид. Его уравнение
получаем эллиптический параболоид. Его уравнение
получается из уравнения параболоида вращения
путем замены у на  . Если р Гиперболический параболоид
. Если р Гиперболический параболоид
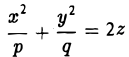
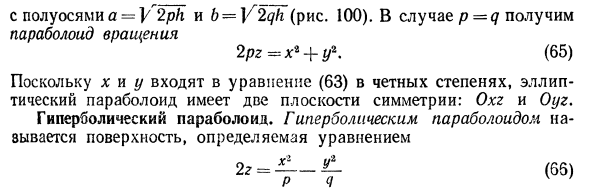
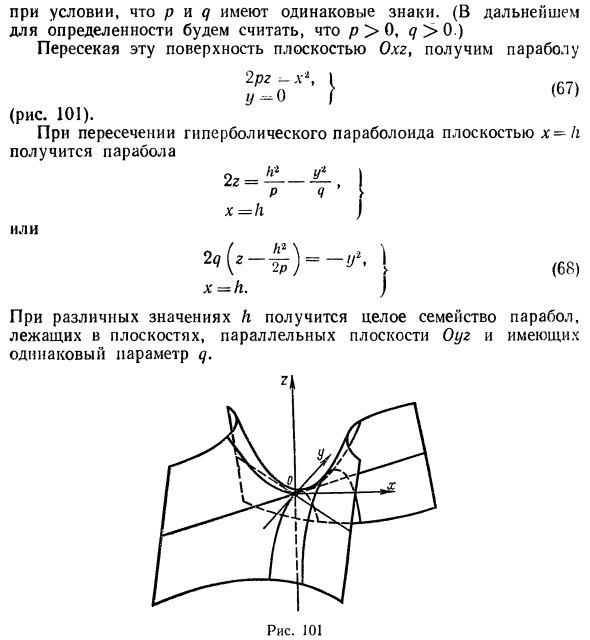
Гиперболическим параболоидом называется поверхность, уравнение которой в некоторой прямоугольной декартовой системе координат Oxyz имеет вид
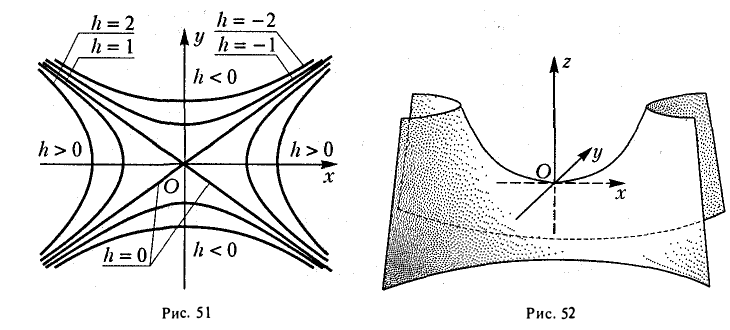
где р > 0, q > 0. Вид этой поверхности определим, применив так называемый метод сечений, который заключается в следующем: параллельно координатным плоскостям проводятся плоскости, пересекающие исследуемую поверхность, и по изменению конфигурации возникающих в результате плоских кривых делается вывод о структуре самой поверхности.
Начнем с сечений плоскостями z = h = const, параллельными координатной плоскости Оху. При h > 0 получаем гиперболы
при h 
при h = 0 — пару пересекающихся прямых
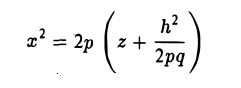
Заметим, что эти прямые являются асимптотами для всех гипербол (т. е. при любом h ≠ 0). Спроектируем получаемые кривые на плоскость Ох у. Получим следующую картину (рис. 51). Уже это рассмотрение позволяет сделать заключение о седлообразном строении рассматриваемой поверхности (рис. 52).
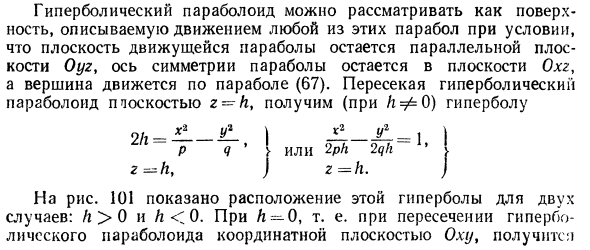
Рассмотрим теперь сечения плоскостями
у = h.
Заменяя в уравнении поверхности у на h, получаем уравнения парабол (рис.53).
Аналогичная картина возникает при рассечении заданной поверхности плоскостями
х = h.
В этом случае также получаются параболы
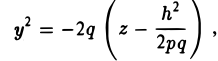
ветви которых направлены вниз (а не вверх, как для сечения плоскостями у = h) (рис. 54).
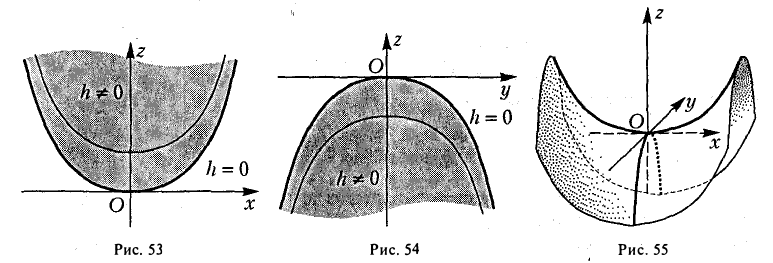
Используя последние два типа сечений, приходим к заключению, что гиперболический параболоид можно получить путем параллельного переноса параболы х2 = 2pz вдоль параболы у2 = -2qz, или наоборот (рис. 55).
Замечание:
Методом сeчeний можно разобраться в строении и всех ранее рассмотренных поверхностей второго порядка. Однако путем вращения кривых второго порядка и последующего равномерного сжатия к пониманию их структуры можно прийти проще и значительно быстрее.
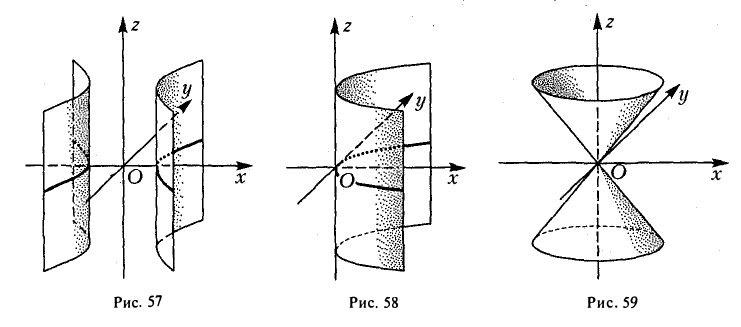
Оставшиеся поверхности второго порядка по существу уже рассмотрены ранее. Это цилиндры:
представление о котором можно получить либо путем вращения пары пересекающихся прямых
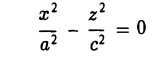
вокруг оси Oz и последующего сжатия, либо методом сечений. Конечно, в обоих случаях получим, что исследуемая поверхность имеет вид, указанный на рис. 59.
Дополнение к поверхностям второго порядка
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Геометрия. 9 класс
Конспект
На координатной плоскости изобразим окружность с центром в начале координат и радиусом, равным единице.
Эта окружность задаётся следующим уравнением: x 2 + y 2 = 1
Рассмотрим часть этой окружности – полуокружность, расположенную в первой и второй четвертях. Координаты любой точки этой полуокружности должны удовлетворять уравнению данной окружности.
Координаты точки М – это значения косинуса и синуса угла α, который соответствует этой точке.
x = cosα, y = sinα
Подставив в формулу окружности выражения для x и y получим следующее равенство: cos 2 α + sin 2 α = 1 (0° ≤ α ≤ 180°).
Это равенство называется основным тригонометрическим тождеством и выполняется для любого угла от нуля градусов до ста восьмидесяти градусов.
В математике существуют формулы, которые позволяют упростить вычисления синусов и косинусов углов. Эти формулы называются формулами приведения:
Если 0° ≤ α ≤ 90°, то
sin(90° — α) = cosα,
cos(90° — α) = sinα.
Если 0° ≤ α ≤ 180°, то
sin(180° — α) = sinα.
cos(180° — α) = —cosα
Вычислим с помощью формул приведения значения синуса угла, равного 150°. Представим угол, равный 150° в виде разности 180° и 30°, воспользуемся соответствующей формулой приведения: sin150° = sin(180° — 30°) = sin30° = 0,5
В верхней полуплоскости прямоугольной системы координат Оху отметим точку А и выразим координаты этой точки через длину отрезка ОА и угол α между лучом ОА с положительной полуосью Ох. Построим в верхней полуплоскости единичную полуокружность. Проведём отрезок ОА и обозначим точку пересечения построенного отрезка с полуокружностью точкой М. Абсцисса точки М равна косинусу соответствующего угла α, а ордината точки М – синусу угла α. Определим координаты вектора ОА. Каждая координата вектора равна разности соответствующих координат его начала и конца.
Найдём координаты вектора ОМ:
(ОМ) ⃗(cos α — 0; sin α — 0),
(ОM) ⃗(cos α; sin α).
(ОА) ⃗↑↑(ОМ) ⃗, тогда (ОА) ⃗= ОА ∙ (ОМ) ⃗
Запишем равенство векторов в координатах. ((х;у)) ⃗= ((ОА ∙ cosα; ОА ∙ sinα)) ⃗
Так как векторы равны, то равны их соответствующие координаты.
x = ОА ∙ cos α
у = ОА ∙ sin α
Мы выразили координаты точки А через длину отрезка АО и угол α между лучом ОА с положительной полуосью Ох: А (ОА ∙ cos α; ОА ∙ sin α)
http://lfirmal.com/poverhnosti-vtorogo-poryadka/
http://resh.edu.ru/subject/lesson/2510/main/