Формулы пружинного маятника
Определение и формулы пружинного маятника
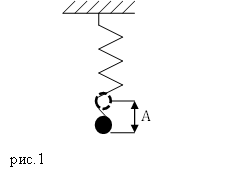
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
где $<щu>^2_0=\frac
где $<\omega >_0=\sqrt<\frac
В экспоненциальном виде колебания пружинного маятника можно записать как:
\[Re\ \tilde
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
Так как частота колебаний ($\nu $) — величина обратная к периоду, то:
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($\varphi $).
Амплитуду можно найти как:
начальная фаза при этом:
где $v_0$ — скорость груза при $t=0\ c$, когда координата груза равна $x_0$.
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
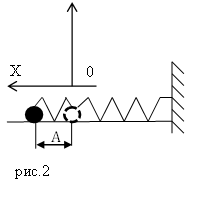
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
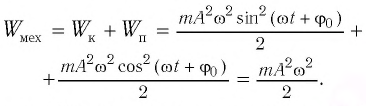
Закон сохранения энергии для пружинного маятника запишем как:
где $\dot
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600\ \frac<Н><м>$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1\ \frac<м><с>$?
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
где $E_
Потенциальная энергия равна:
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
Из (1.4) выразим искомую величину:
Вычислим начальное (максимальное) смещение груза от положения равновесия:
Ответ. $x_0=1,5$ мм
Задание. Пружинный маятник совершает колебания по закону: $x=A<\cos \left(\omega t\right),\ \ >\ $где $A$ и $\omega $ — постоянные величины. Когда возвращающая сила в первый раз достигает величины $F_0,$ потенциальная энергия груза равна $E_
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
Потенциальную энергию колебаний груза найдем как:
В момент времени, который следует найти $F=F_0$; $E_p=E_
Колебания груза на пружине — формулы, уравнения и задачи
Теория периодичности относится к общей физике. Повторяемость некоторых процессов в течение времени определяют с помощью различных величин, например, угла, напряжённости, температуры. Для изучения явления удобно использовать маятник. Одним из его видов является пружина с грузом. Колебания в такой системе зависят от периода, частоты и амплитуды. Узнать эти параметры можно, зная начальные условия и уравнения, описывающие механическую работу.

Общие сведения
Колебания — это изменения какой-либо величины в точности или приблизительно повторяющиеся во времени. Если рассматривать процесс, с точки зрения механики, то он описывается положением тела. Повторение в точности является периодическим. Математически это можно записать формулой: x (t + T) = x (t), где T — время, в течение которого совершается одно полное колебание (период). Число циклов принято обозначать буквой N. Его находят как отношение времени к периоду: N = t / T.

При исследовании процесса не всегда бывает удобно оперировать временем, поэтому часто используют число колебаний за единицу времени. Эта величина называется частотой. Находят её количество по формуле: f = 1 / T. Доказать справедливость приведённого равенства просто. Число колебаний зависит от времени и частоты: N = f * t. Отсюда: f = N / t = (t / T) / t = 1 / T.
Очень важно не только понимать суть характеристик колебания, но и знать единицы его измерения. Вот основные из них:
- период — секунды (с);
- частота — герцы (Гц);
- число колебаний — безразмерная величина.
Если в течение времени меняется и координата, то периодически будет изменяться и скорость. Значит: vx (t + T) = Vx (t).
Исходя из верности равенства, можно сказать, что условие периодичности будет справедливо и для проекции, то есть изменения ускорения. Отсюда следует, что сила действующая на тело тоже будет переменной: Fx (t + T) = Fx (t).
При процессе также происходит изменение потенциальной и кинетической энергий. Действительно, так как в процессе колебания скорость не является постоянной величиной, то соответственно будет меняться кинетическая работа. Потенциальная же энергия зависит от координат. Например, если рассмотреть период колебаний пружинного маятника, то за это время тело переместится из нижнего положения в верхнее и вернётся обратно. Значит, координата физического объекта изменится от нуля до какого-то граничного значения.
Следует отметить, что периодичные движения обязательно будут происходить в той системе, в которой есть положение равновесия. Причём оно должно быть устойчивым. То есть существует равнодействующая сила, стремящаяся привести объект в положение, соответствующее покою. Поэтому для поддержания отклонений нужна дополнительная сила. Колебательную систему (осциллятор) под действием вынужденной периодической силы называют вынужденной.
Пружинный маятник
Это устройство является простейшим примером свободных колебаний. В его состав входит кронштейн, пружина и груз. В качестве последнего может выступать любое физическое тело. Масса пружины по сравнению с грузом считается малой и при исследованиях не учитывается.
При изучении такой системы важной задачей является измерение периода движения тела, подвешенного к пружине. Определение понятию пружинного маятника, которое даётся в учебниках по физике довольно обобщённое. Считается, что это конструкция, в которой тело, имеющее массу m, подвешено на упругой пружине обладающей жёсткостью K. При этом из состояния равновесия систему может вывести упругая сила F = — k * x, где: x- расстояние от середины пружинного элемента до поверхности прикреплённого к нему груза.

Можно выделить два достаточных условия возникновения свободных колебаний:
Суть изучения гармонических колебаний состоит в определении их частоты движения или периода. В пружинном маятнике, впрочем, как и в любой колебательной системе, параметры зависят от ряда характеристик. Из основных величин, описывающих процесс, можно выделить: массу груза и жёсткость. Поэтому задача и состоит в выяснении, как период зависит от этих двух параметров.
Во время экспериментов регулировать массу довольно легко. Для этого можно взять эталонные гири и, соединяя их, увеличивать вес. Жёсткость же пружины можно изменить, добавляя параллельно или последовательно к ней другое сжимающееся тело. Чтобы выяснить, как будет изменяться характеристика растягивающегося элемента, нужно знать, что же представляет собой параметр. Так, под жёсткостью тела понимают отношение силы упругости к удлинению: k0 = F / Δ L. Измеряется величина в ньютонах, делённых на метр (Н/м).
Исходя из правила, если соединить две пружины параллельно и деформировать их, то можно утверждать, что первый и второй элемент растянется на одинаковую длину ΔL. Значит, возникнет две одинаково направленных силы упругости. Отсюда равнодействующая будет равняться: K = 2F/ ΔL = 2k0. Для последовательного же соединения длина всей системы увеличится на 2 ΔL. Сила упругости будет равна F. Соответственно, жёсткость будет изменяться по формуле: K = F / 2ΔL = k0 / 2.
Зависимость периода
При проведении эксперимента можно исследовать пять различных комбинаций поведения груза на пружине — два варианта связаны с весом и три с жёсткостью. Чтобы выполнить опыт самостоятельно нужно будет взять вертикальный кронштейн, две одинаковые пружины и два равных по весу груза. Так как в реальности период будет довольно маленький, то для его измерения можно взять время, например, пятидесяти колебаний, а потом полученный результат разделить на это число. Подсчёт времени удобно выполнять с помощью секундомера.

Вычисленные результаты нужно занести в таблицу. Примерный порядок чисел должен получиться таким:
| k m | m0 | 2m0 |
| k0 / 2 | 0,68 | 0,93 |
| k0 | 0,46 | 0,64 |
| 2k0 | 0.34 | 0,47 |
Эти данные можно проанализировать. Выводы будут следующими:
- с ростом массы физического тела период цикличности увеличивается;
- по мере увеличения жёсткости период колебаний уменьшается.
Приведённые утверждения, возможно, описать и количественно. Исходя из результатов, величины, стоящие в ячейке m0k0 и 2m02ko почти совпадают. С точки зрения физики, так и должно быть. Если взять грузик на пружине и измерить характеристику, а потом добавить к нему точно такую же систему, то период не поменяется. Это и можно наблюдать во время опыта. Значит, период движения зависит от того каким будет отношение массы к жёсткости.

По аналогии можно рассмотреть, как влияет жёсткость. Из эксперимента, видно, что если её увеличить дважды на одну и ту же величину, то она возрастёт в четыре раза, а значение обратное частоте уменьшится на это же число. Отсюда можно предположить, что период будет обратно пропорционален корню квадратному из жёсткости.
Объединив эти две гипотезы можно сделать заключение. Что период амплитуды колебаний груза на пружине будет прямо пропорционален корню квадратного из отношения массы к жёсткости: T = √(m / k). Проверить это утверждение можно по теории размерности. Подставив в формулу единицы измерения, получим: √(m / k) = √(кг / (Н/м)) = √(кг * м / Н). Учитывая, что ньютон — это отношение метра к секунде в квадрате или килограмму, умноженному на метр и делённому на секунду, размерное равенство примет вид: √(кг * м/Н) = √(c 2 * м/м) = √с 2 = с.
Для написания полной формулы в равенство нужно вести ещё коэффициент. Он будет равняться 2p. Значит, период колебаний пружинного маятника количественно описывается выражением: T = 2p * √ (m / k).
Примеры решения задач
Практические задания помогают лучше разобраться в теоретическом материале и запомнить нужные для решения формулы. Существуют различные примеры, с помощью которых можно довольно быстро проработать весь изученный курс. Вот два задания с подробным описанием решения на вычисления параметров пружинных колебаний тела. Разобравшись в них, можно переходить к самостоятельному вычислению более сложных примеров.

Задание № 1. Груз, подвешенный к пружине, перемещается циклически по вертикальной оси. За восемь секунд он совершил тридцать два колебания. Определить частоту. Итак, по условию задания дано время t = 8 c и число полного перемещения тела N = 32. Чтобы решить эту задачу нужно воспользоваться формулой нахождения периода: T = t / N. Все величины для этого есть: T = 8 c / 32 = 1 / 4 = 0,25 секунды. Частота связана с периодом выражением: f = 1 / T. После подстановки чисел получится ответ равный четырём герцам.

Задание № 2. Грузик совершает колебания на пружине с жёсткостью сто ньютон на метр. При этом максимальная скорость движения составляет два метра в секунду. Вычислить массу тела учитывая, что максимальная амплитуда отклонения от точки покоя составляет десять сантиметров. Силой трения пренебречь.
При решении примера нужно рассуждать следующим образом. Когда будет максимальное растяжение пружины, то скорость груза равна нулю: V1 = 0. Значит, кинетическая энергия тоже будет нулевой: Ek1 = 0.
В этот момент останется только потенциальная энергия вытянутой пружины Ep1. В положении равновесия скорость тела максимальная и равняется V = 2 м/с. Так как пружина в этот момент нерастянута и несжатая, то Ep = 0.
По закону сохранения энергии: Ek1 + Ep1 = Ek + Ep. Кинетическая работа при растянутой пружине равняется нулю, так же как и потенциальная в состоянии покоя, значит, Ep1 = (k * L 2 ) / 2, где L — удлинение, а k — жёсткость. Энергию же можно найти так: Ek = mV 2 / 2. Так как тело совершает колебания около положения равновесия, то вытянутость пружины будет равняться амплитуде.
Перед тем как непосредственно переходить к составлению итоговой формулы и вычислениям необходимо все значения измерений привести в соответствии с СИ. Так, амплитуда указана в сантиметрах, поэтому её нужно перевести в метры. Теперь можно переходить к составлению отношения и подстановки данных: (k * L 2 ) / 2 = mV 2 / 2. Отсюда: m = (k * L) / V 2 = (100 Н/м * 0,1 2 м) / 2 2 м/с = 1 / 4 = 0,25 килограмма.
Гармонические колебания в физике — формулы и определение с примерами
Содержание:
Гармонические колебания:
Некоторые движения, встречающиеся в быту, за равные промежутки времени повторяются. Такое движение называется периодическим движением. Часто встречается движение, при котором тело перемещается то в одну, то в другую сторону относительно равновесного состояния. Такое движение тела называется колебательным движением или просто колебанием.
Колебания, совершаемые телом, которое выведено из равновесного состояния в результате действия внутренних сил, называются собственными (свободными) колебаниями. Величина удаления от равновесного состояния колеблющегося тела называется его смещением (
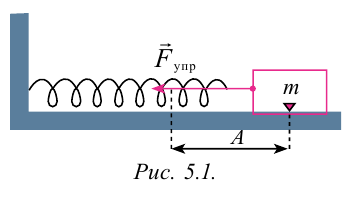
Для наблюдения механических колебаний ознакомимся с колебаниями груза, закрепленного на конце пружины (рис. 5.1). На этом рисунке груз, закрепленный на пружине, сможет двигаться без трения с горизонтальным стержнем, так как силу тяжести шарика приводит в равновесие реакционная сила стержня.
Коэффициент упругости пружины –  , а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
, а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
Если груз, который находится в равновесии, потянем вправо на расстояние  и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
сторону равновесного состояния.

С течением времени смещение груза уменьшается относительно  , но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение (
, но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение ( ) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
Для определения закономерности изменения в течение времени системы, которая периодически совершает колебания, заполним воронку песком, подвесим на веревке, подложим бумагу под систему и раскачаем воронку. В ходе колебания начинаем равномерно вытягивать бумагу из-под системы. В результате мы увидим, что следы песка на бумаге образуют синусоиду. Из этого можно сделать следующий вывод: смещение периодически колеблющегося тела по истечении времени изменяется по закону синусов и косинусов. При этом самое большое значение смещения равняется амплитуде ():

здесь:  – циклическая частота, зависящая от параметров колеблющихся систем,
– циклическая частота, зависящая от параметров колеблющихся систем,  – начальная фаза, (
– начальная фаза, ( ) фаза колебания с течением времени
) фаза колебания с течением времени  .
.
Из математики известно, что  поэтому формулу (5.2.) можно записать в виде
поэтому формулу (5.2.) можно записать в виде

Колебания, в которых с течением времени параметры меняются по закону синуса или косинуса, называются гармоническими колебаниями.
Значит, пружинный маятник, вышедший из равновесного состояния, совершает гармоническое колебание. Для того чтобы система совершала гармоническое колебание: 1) при выходе тела из равновесного состояния, для возвращения его в равновесное состояние должна появиться внутренняя сила; 2) колеблющееся тело должно обладать инертностью и на него не должны оказывать воздействие силы трения и сопротивления. Эти условия называется условиями проявления колебательных движений.
Основные параметры гармонических колебаний
a) период колебания  – время одного полного колебания:
– время одного полного колебания:
 )
)
б) частота колебания  – количество колебаний, совершаемых за 1 секунду:
– количество колебаний, совершаемых за 1 секунду:

Единица 
c) циклическая частота  – количество колебаний за
– количество колебаний за  секунд:
секунд:

С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.

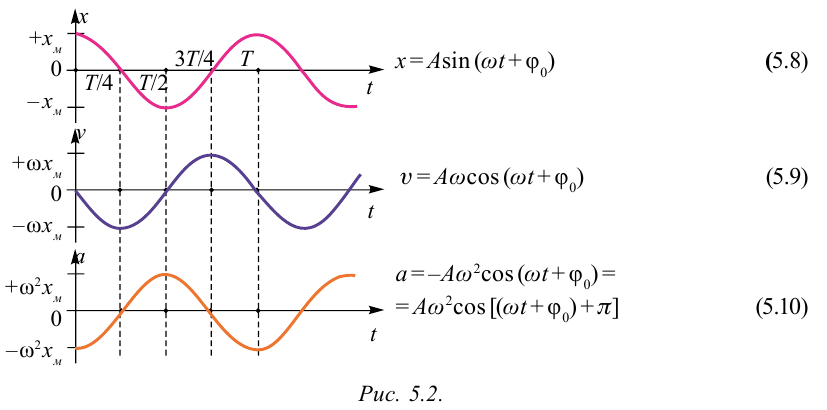
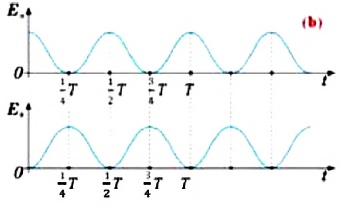
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются.
Это подтверждается следующими графиками и уравнениями:
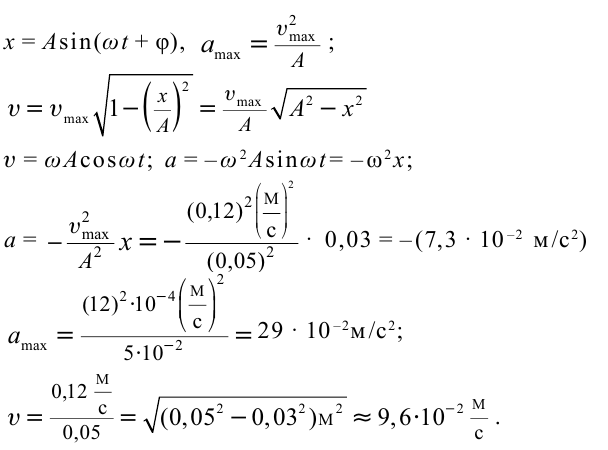
Пример решения задачи:
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.

Формула и решение:
Гармонические колебания пружинного маятника
В 1985 году в городе Мехико произошла ужасная катастрофа, причина которой было землетрясение: 5526 человек погибли, 40 ООО человек ранены, 31000 человек остались без крова. Из проведенных затем исследований ученые выяснили, что главной причиной разрушений во время землетрясения является совпадение частоты свободных колебаний зданий с частотой вынужденных колебаний Земли. Поэтому при возведении новых зданий в сейсмически активной зоне необходимо, чтобы эти частоты не совпадали. Это даст возможность уменьшить последствия землетрясения. С этой целью важно знать, от чего зависят частота и период колебаний.
Одной из простейших колебательных систем, совершающих гармонические колебания, является пружинный маятник.
Пружинный маятник — это колебательная система, состоящая из пружины и закрепленного на ней тела. Колебания, возникающие в пружинном маятнике, являются гармоническими колебаниями:
Под гармоническими колебаниями подразумеваются колебания, возникающие под действием силы, прямо пропорциональной перемещению и направленной против направления перемещения.
Исследование колебаний пружинного маятника имеет большое практическое значение, например, при вычислении колебаний рессор автомобиля при езде; в исследовании воздействия колебаний на фундамент зданий и тяжелых станков, в определении эластичности ушных перепонок при диагностике лор-заболеваний. По этой причине изучение колебаний пружинного маятника является актуальной проблемой.
С целью уменьшения количества сил, действующих на колебательную систему, целесообразно использовать горизонтально расположенную колебательную систему пружина-шарик (d).
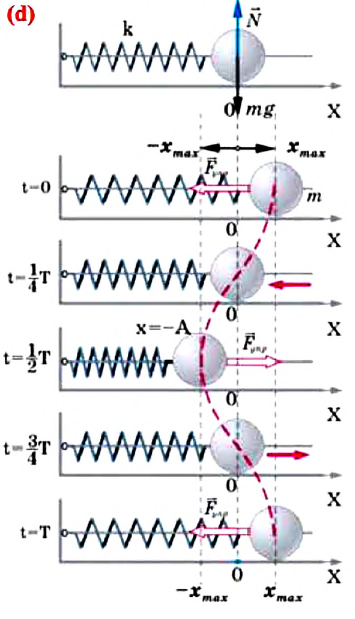
В этой системе действия силы тяжести и реакции опоры уравновешивают друг друга. При выведении шарика из состоянии равновесия, например, при растяжении пружины до положения  сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:
сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:

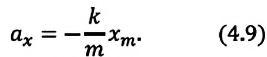
Формула (4.9) является уравнением свободных гармонических колебаний пружинного маятника.
Где  — масса шарика, закрепленного на пружине,
— масса шарика, закрепленного на пружине,  — проекция ускорения шарика вдоль оси
— проекция ускорения шарика вдоль оси  — жесткость пружины,
— жесткость пружины,  -удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение
-удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение  — постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение
— постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение  соответствует квадрату циклической частоты
соответствует квадрату циклической частоты 
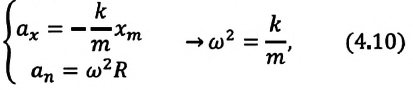
Таким образом, уравнение движения пружинного маятника можно записать и так:

Уравнение (4.12) показывает, что колебания пружинного маятника с циклической частотой  являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:
являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:

Так как тригонометрическая функция является гармонической функцией, то и колебания пружинного маятника являются гармоническими колебаниями.
Здесь  фаза колебания,
фаза колебания,  — начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:
— начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:  Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы
Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы  В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
 или
или 
Из сравнения выражений (4.11) и (4.5) определяются величины, от которых зависят период и частота колебаний пружинного маятника:
Из выражений (4.14) и (4.15) видно, что период и частота пружинного маятника зависят от жесткости пружины и массы груза, подвешенного к нему.
Гармонические колебания математического маятника
До наших дней дошла такая историческая информация: однажды в 1583 году итальянский ученый Г. Галилей, находясь в храме города Пиза, обратил внимание на колебательное движение люстры, подвешенной на длинном тросе. Он, сравнивая колебания люстры со своим пульсом, определил, что, несмотря на уменьшение амплитуды колебания, время, затрачиваемое на одно полное колебание (период колебания) люстры, не изменяется. Затем Галилей в результате многочисленных проведенных исследований, изменяя длину нитевого маятника, массу подвешенного к нему груза, высоту расположения маятника (по сравнению с уровнем моря), определил, от чего зависят период и частота колебаний маятника.
Гармонические колебания возникают также под действием силы тяжести. Это можно наблюдать с помощью математического маятника.
Математический маятник — это идеализированная колебательная система, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити.
Для исследования колебаний математического маятника можно использовать систему, состоящую из тонкой длинной нити и шарика (b).
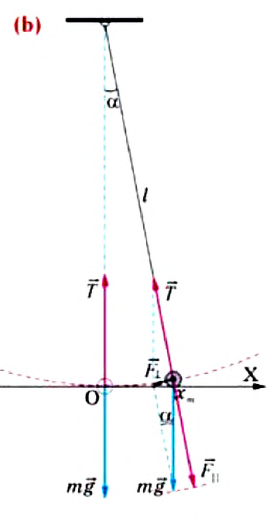
Сила тяжести  действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити
действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити  Однако, если вывести маятник из состояния равновесия, сместив его на малый угол
Однако, если вывести маятник из состояния равновесия, сместив его на малый угол  в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити
в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити  и перпендикулярная нити
и перпендикулярная нити  Сила натяжения
Сила натяжения  и составляющая силы тяжести
и составляющая силы тяжести  уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей
уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей  «пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой
«пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой  в проекциях на ось ОХ:
в проекциях на ось ОХ:
Приняв во внимание, что:

Для уравнения движения математического маятника получим:

Где  — длина математического маятника (нити),
— длина математического маятника (нити),  — ускорение свободного падения,
— ускорение свободного падения,  — амплитуда колебания.
— амплитуда колебания.
Для данной колебательной системы отношение  — постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты
— постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты 


Таким образом, уравнение движения математического маятника можно записать и так:

Уравнение (4.19) показывает, что колебания математического маятника являются гармоническими колебаниями с циклической частотой со. Из математики вы знаете, что решением этого уравнения является нижеприведенная функция:

Так как эта функция является гармонической, то и колебания математического маятника являются гармоническими колебаниями.
Отсюда определяются величины, от которых зависят период и частота колебаний математического маятника:
Таким образом, период и частота колебаний математического маятника зависят от длины маятника и напряженности гравитационного поля в данной точке.
Скорость и ускорение при гармонических колебаниях
Вы уже знакомы с основными тригонометрическими функциями и умеете строить графики тригонометрических уравнений, описывающих гармонические колебания.
При гармонических колебаниях маятника его смещение изменяется по гармоническому закону, поэтому не трудно доказать, что его скорость и ускорение также изменяются по гармоническому закону. Предположим, что смещение изменяется по закону косинуса и начальная фаза равна нулю

Так как скорость является первой производной смещения (координат) по времени, то:


Как видно из выражения (4.23), скорость, изменяющаяся по гармоническому закону, опережает колебания смещения по фазе на  (а).
(а).
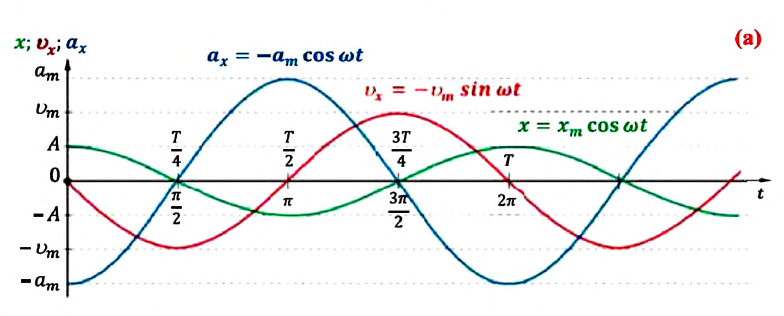
Максимальное (амплитудное) значение скорости зависит от амплитуды, частоты и периода колебаний:

Так как ускорение является первой производной скорости по времени, то получим:


Как видим, колебания ускорения, изменяющегося по гармоническому закону, опережают колебания скорости по фазе на  а колебания смещения на
а колебания смещения на
 (см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:
(см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:

Превращения энергии при гармонических колебаниях
Теоретический материал
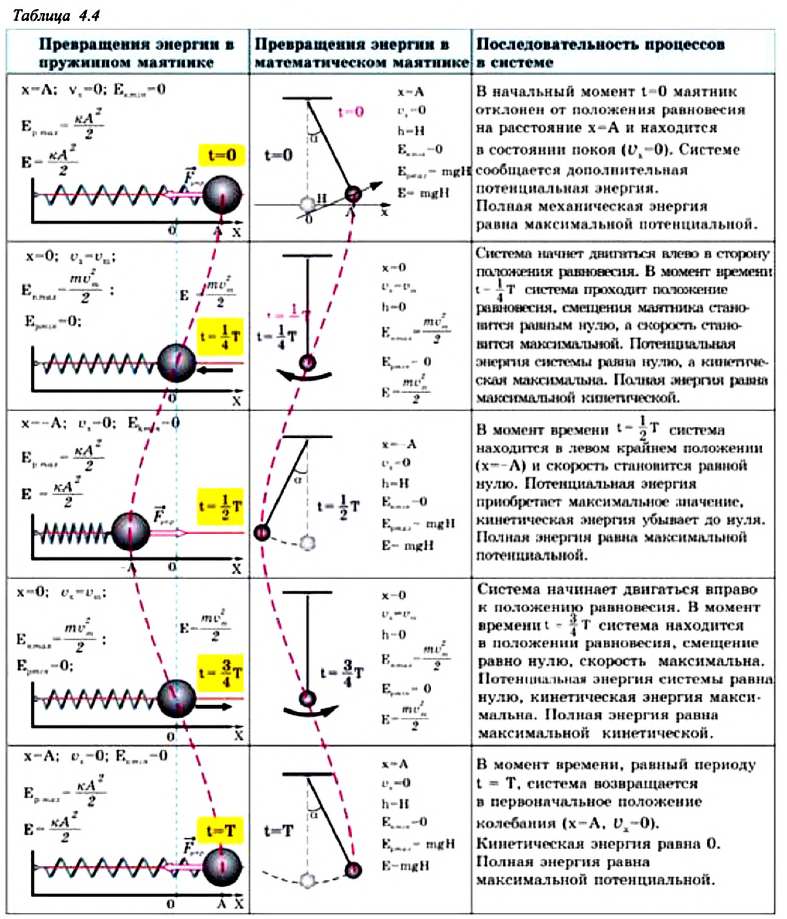
Потенциальная и кинетическая энергия свободных гармонических колебаний в замкнутой системе периодически превращаются друг в друга.
В таблице 4.4 дано сравнение превращений энергий в пружинном и математическом маятниках. Как видно из таблицы, потенциальная энергия колебательной системы в точке возвращения  имеет максимальное значение:
имеет максимальное значение:
Если же маятник находится в точке равновесия, потенциальная энергия минимальна:

Кинетическая энергия системы, наоборот, в точке возвращения минимальна  а в точке равновесия максимальна:
а в точке равновесия максимальна:
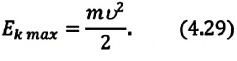
На рисунке (а) даны графики зависимости потенциальной и кинетической энергии при гармоническом колебательном движении от смещения.
Полная механическая энергия замкнутой колебательной системы в произвольный момент времени  остается постоянной (трение не учитывается):
остается постоянной (трение не учитывается):
a) для пружинного маятника:
b) для математического маятника:
Если принять во внимание изменение смещения и скорости по гармоническому закону в формулах потенциальной и кинетической энергии колебательного движения, то станет очевидно, что при гармонических колебаниях эти энергии так же изменяются по гармоническому закону (b):

Как было отмечено выше, полная энергия системы не изменяется по гармоническому закону:

• Полная энергия гармонических колебаний прямо пропорциональна квадрату амплитуды колебаний.
Если же в системе существует сила трения, то его полная энергия не сохраняется — изменение полной механической энергии равно работе силы трения. В результате колебания затухают: 
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол а (рис. 7), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

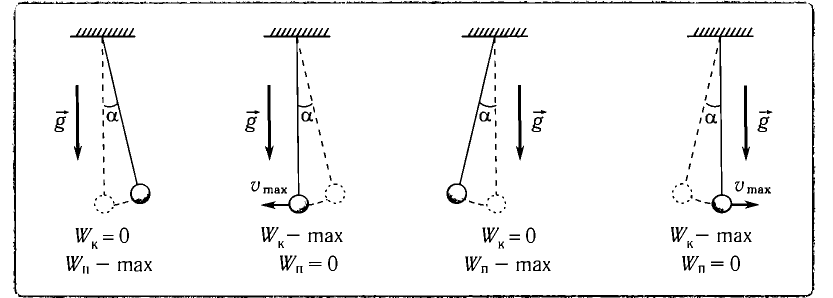
Рис. 7. Превращения энергии при колебаниях математического маятника
Поскольку при прохождении положения равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:
Из закона сохранения механической энергии следует (рис. 8), что
 (1)
(1)
Отсюда найдем модуль максимальной скорости маятника:
 (2)
(2)
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
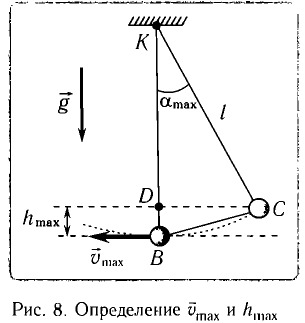
Если колебания малые, то  Из треугольника KCD на рисунке 8 находим
Из треугольника KCD на рисунке 8 находим


Подставив выражение для в формулу I (2), получим
Подставляя выражения для  и в соотношение (1), находим
и в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

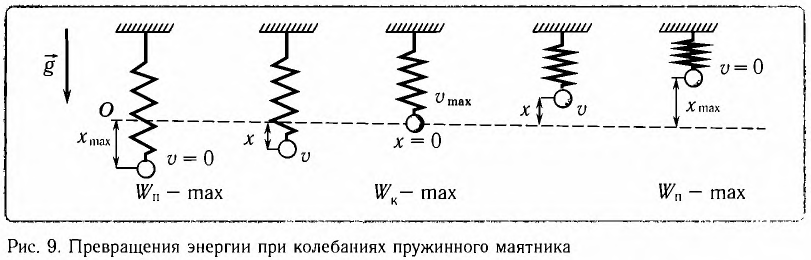
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 9). В крайних точках, когда координата груза принимает значение  , модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда x = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В промежуточных точках полная механическая энергия

Отсюда можно вывести выражение для модуля скорости  груза в точке с
груза в точке с
Так как 
Энергия при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

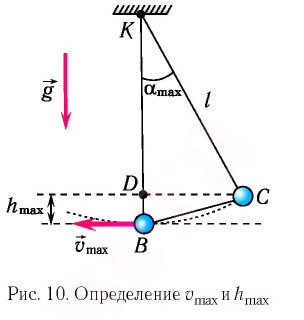
Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  то из закона сохранения механической энергии следует (см. рис. 10), что
то из закона сохранения механической энергии следует (см. рис. 10), что  т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:
Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  Из
Из  (см. рис. 10) находим:
(см. рис. 10) находим: 
или 
Подставив выражение (3) для  в формулу (2), получим:
в формулу (2), получим: 
Подставляя выражения (3) для  и (4) для
и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

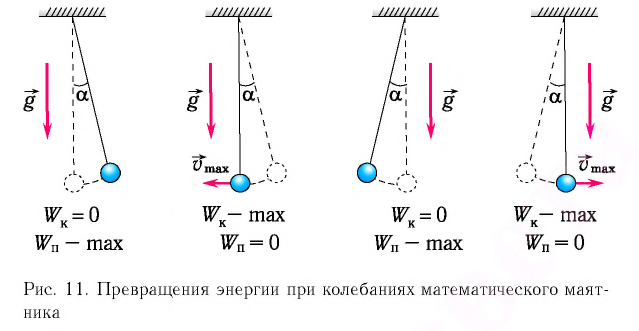
Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11). В любом промежуточном положении 
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
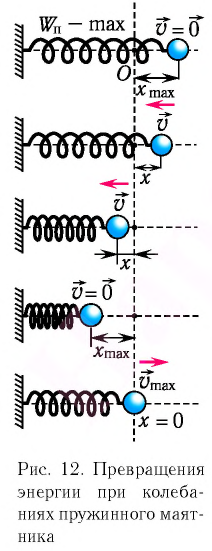
В крайних положениях, когда  модуль скорости маятника
модуль скорости маятника  и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  вся энергия пружинного маятника переходит в кинетическую энергию груза:
вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  а также для
а также для  находим его потенциальную энергию
находим его потенциальную энергию  и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени
Тогда полная механическая энергия пружинного маятника в этот же. момент времени есть величина постоянная и равная:
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
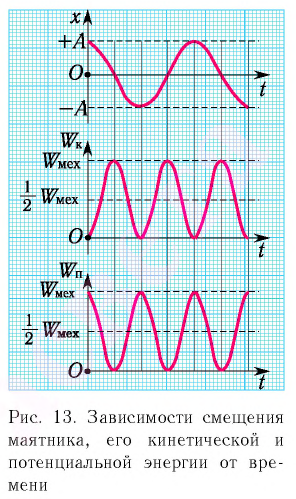
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
Пример №1
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  см и при прохождении положения равновесия достигает скорости, модуль которой
см и при прохождении положения равновесия достигает скорости, модуль которой  Определите период
Определите период  колебании маятника.
колебании маятника.
Дано:

Решение
По закону сохранения механической энергии


Ответ: 
Пример №2
Груз массой  г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  Его смешают на расстояние
Его смешают на расстояние  см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  Определите потенциальную
Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.

Решение Потенциальная энергия груза: 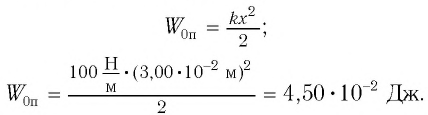
Кинетическая энергия груза: 
Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда 
Циклическая частота: 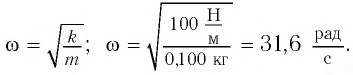
В начальный момент времени  координата груза
координата груза  Отсюда начальная фаза:
Отсюда начальная фаза: 
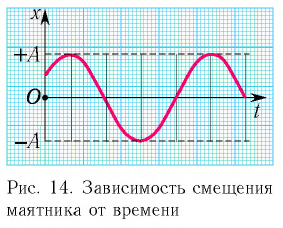
Тогда закон гармонических колебаний имеет вид (рис. 14):

Ответ: 

| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Вынужденные электромагнитные колебания
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
- Механические колебания и волны в физике
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://sprint-olympic.ru/uroki/fizika/107648-kolebaniia-gryza-na-pryjine-formyly-yravneniia-i-zadachi.html
http://www.evkova.org/garmonicheskie-kolebaniya-v-fizike